
Размеры матриц фотоаппаратов таблица: типы, размер, разрешение, светочувствительность, уход
Полнокадровая технология — Sony Pro
Два стандартных параметра ISO
Для эффективной работы цифрового датчика изображения необходимо использовать базовое значение ISO. Благодаря ему вы обеспечите максимально низкий уровень шума, оптимальное соотношение «сигнал — шум» и наиболее расширенный динамический диапазон. Это возможно, так как при использовании базовых настроек ISO на сигнал, исходящий от матрицы, не действует коэффициент усиления напряжения. Довольно часто при повышении этого коэффициента, например чтобы увеличить значение ISO или сделать изображение ярче, на картинке появляются шумы и снижается динамический диапазон. Ваше изображение действительно будет в два раза ярче, но при этом так же увеличится соотношение «сигнал — шум», а качество снимка значительно снизится. Если зернистый кадр, снятый на аналоговую пленку, например ASA 400, может выглядеть интересно и уникально, то шум на цифровом изображении свидетельствует о его низком качестве.
Поэтому в настройках полнокадровой матрицы, встроенной в камеры VENICE и FX9, доступны два базовых значения ISO, с помощью которых можно отрегулировать показатели чувствительности датчика изображения.
В камере VENICE используется базовое значение ISO 500, что обеспечивает оптимальный баланс динамического диапазона при стандартном освещении на съемочной площадке. Вспомогательное высокое базовое значение ISO равняется 2500 и отлично подходит для съемки в расширенном динамическом диапазоне в условиях низкой освещенности. Камера FX9 с чувствительностью ISO 800 обеспечивает оптимальный динамический диапазон для съемки как на улице, так и в ярко освещенных помещениях. Вспомогательное высокое базовое значение чувствительности ISO равняется 4000 и отлично подходит для работы в условиях низкой освещенности. Вы можете подобрать базовое значение ISO под свой уровень освещенности и менять его, не снижая качество изображения и не прерывая рабочий процесс.
Параметры камер мобильных телефонов. Основные характеристики, проблемы и примеры дефектов на снимках.
 Как выбрать смартфон с хорошей камерой
Статья:
Как выбрать смартфон с хорошей камерой
Статья:Съемка камерой мобильного телефона (смартфона). Параметры камер мобильных телефонов. Основные характеристики, проблемы и примеры дефектов на снимках. Как выбрать смартфон с хорошей камерой?
Предисловие
Съемка на камеру мобильного телефона (смартфона) прочно вошла в нашу жизнь. Многие пользователи смартфонов считают, что «обычный» фотоаппарат им уже просто не нужен, достаточно иметь смартфон с хорошей камерой.
Но вот вопрос — какую камеру смартфона считать «хорошей»? Или всегда ли она сможет заметить хотя бы простенькую «цифромыльницу»?
Давайте
рассмотрим этот вопрос с точки зрения характеристик камер, их
особенностей, а также типичных проблем и ошибок, приводящих к потере
качества фотографий и видео, снятых с «мобильника».
При этом разделим параметры камер мобильных телефонов на две группы: параметры фотоматриц и параметры объективов.
Физические принципы цифровой фотографии
Физические
принципы цифровой фотосъемки почти не отличаются от работы фотоэлемента
из школьного курса физики. Свет, падающий на чувствительную поверхность
(которая является первым электродом), выбивает из неё электроны, которые
достигают второго электрода. В результате между ними возникает разность
потенциалов, которая считывается и отправляется на обработку. А этот
фотоэлемент является ни чем иным, как элементарным пикселем датчика
изображения. Эти пиксели объединены в матрицу, а их количество
представляет собой то самое число мегапикселей, которое мы видим на
упаковке смартфона или фотоаппарата.
Правда, на самом деле пикселей там в три раза больше, потому что в цветной фотографии каждый пиксель образуют три датчика, чувствительных к разным цветам: красному, зеленому, синему (RGB в буржуйской терминологии).
Итак, всё с виду хорошо и гладко. Откуда же возникают дефекты изображения?
Объективные причины — электрические шумы в матрице и недостаток её динамического диапазона; а также погрешности объектива, формирующие на матрице неточную картинку реального мира.
Субъективные причины — «дрожание» камеры фотографа (особенно это серьезно при слабом освещении), ошибочная фокусировка, ошибки при выборе экспокоррекции и т.п.
В
отдельных случаях дефекты изображения, возникшие вследствие реальных
физических причин, усугубляются и программной обработкой, работающей
временами по принципу «хотели, как лучше; а получилось.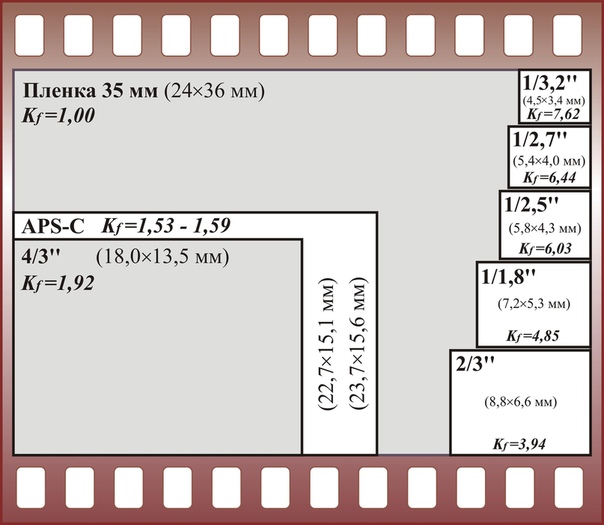 ..». 🙂
..». 🙂
Параметры матриц, часть 1. Физический размер матрицы и количество мегапикселей.
Поскольку матрица цифровой камеры — не только датчик изображения, но и источник шумов, то параметры матриц будем рассматривать в тесной увязке с их влиянием на шум.
Итак, первые два параметра:
1. Размер
матрицы.
2. Количество (мега)пикселей.
Размер
матрицы определяется замысловатыми дробями вида, например, 1/2.7 (не
путать с диафрагмой, имеющей немного похожее обозначение, вида
F/2.7).
В
данном случае это соответствует диагонали матрицы в 6.27 мм, а размеры
сторон 5.02 x 3.76 мм.
Как это перевести размер 1/2.7 в «нормальные» единицы? Эта дробь означает, что диагональ матрицы в 2. 7 раза
меньше, чем диагональ матрицы в видиконе диаметром 1 дюйм. Видикон — это
древний электронно-лучевой прибор, применяемый в телевизионных камерах
«ламповой» эпохи. И матрица в круглом 1-дюймовом видиконе была,
естественно, меньше диаметра видикона и составляла чуть больше 16 мм
(т.е. не точно 16 мм, имеются «разночтения»). Эти 16
мм и есть тот «видиконовый дюйм», от которого до сих пор рассчитываются
параметры цифровых фотоматриц, хотя сами видиконы можно найти только в
технических музеях. 🙂
7 раза
меньше, чем диагональ матрицы в видиконе диаметром 1 дюйм. Видикон — это
древний электронно-лучевой прибор, применяемый в телевизионных камерах
«ламповой» эпохи. И матрица в круглом 1-дюймовом видиконе была,
естественно, меньше диаметра видикона и составляла чуть больше 16 мм
(т.е. не точно 16 мм, имеются «разночтения»). Эти 16
мм и есть тот «видиконовый дюйм», от которого до сих пор рассчитываются
параметры цифровых фотоматриц, хотя сами видиконы можно найти только в
технических музеях. 🙂
Теперь разберем, почему чем матрица крупнее — тем она лучше.
Шум в
матрице определяется случайным (тепловым) движением электронов; а сигнал
— интенсивностью светового потока, временем экспозиции (т.е. накопления
заряда) и площадью светочувствительного элемента (пикселя). Соответственно, чем выше параметры, образующие сигнал, тем будет лучше
соотношение сигнал/шум при прочих равных условиях.
Соответственно, чем выше параметры, образующие сигнал, тем будет лучше
соотношение сигнал/шум при прочих равных условиях.
Если хотя бы один из перечисленных параметров — низкий, то на изображении начинают «проступать» шумы в виде хаотично расположенных точек и пятен различной яркости и цвета. Так выглядит зашумленная фотография в условиях пониженного освещения:
Лучше этот эффект заметен при увеличении до 100% (фрагмент см. ниже). Шумы делают менее различимым изображение сфотографированных предметов:
Вернемся к вопросу о способах уменьшения шумов.
С
интенсивностью светового потока и площадью пикселя все понятно, а как
увеличить время экспозиции, не доводя изображение до пересвечивания?
Очень просто — снижая чувствительность при съемке (чувствительность
выражается в единицах ISO — 50, 100, 200, 400
и т.
Но размер пикселя определяется не только размером матрицы, но и количеством пикселей на матрице (грубо говоря, надо площадь матрицы разделить на число пикселей). Отсюда — следующий вывод: чем мегапикселей в матрице меньше, тем соотношение сигнал/шум лучше. Но при высоком уровне освещения даже и с мелким размером пикселя соотношение сигнал/шум будет неплохим. А при падении освещения преимущество будет за теми камерами, у которых пиксель крупнее.
Кстати,
размер пикселя (точнее, расстояния между пикселями) уже достиг своего
физического предела, который составляет 1 мкм. Дальнейшее уменьшение
размера пикселя теряет смысл, поскольку длина световой волны составляет
от 0. 39 до 0.78 мкм; и при расстоянии между пикселями менее 0.78 мкм
(красный свет), соседние пиксели будут показывать просто одно и то же.
39 до 0.78 мкм; и при расстоянии между пикселями менее 0.78 мкм
(красный свет), соседние пиксели будут показывать просто одно и то же.
По описанным выше причинам, потребителю надо иметь в виду, что зачастую количество мегапикселей имеет больше рекламный характер, чем реальную пользу. Практически, если в камере есть 12-13 мегапикселей, то это уже неплохо; но это — еще не гарантия, что всё будет хорошо — в дело вступит качество оптики. Если же в камере СОВРЕМЕННОГО смартфона количество мегапикселей менее 10, то, скорее всего это — дешевая камера, от которой не стоит ждать высокого качества снимков.
В то же время, если производитель — достаточно солидный и уважаемый (SONY, Asus, Samsung и т.д.), то и большое количество мегапикселей лишним не будет. По крайней мере, при ярком освещении.
Если есть
сомнения, будет ли толк от большого числа мегапикселей, то лучше выбрать
тот смартфон, у которого больше физический размер матрицы. А уменьшить
количество мегапикселей на фото можно после можно уже и после съемки в
графическом редакторе.
А уменьшить
количество мегапикселей на фото можно после можно уже и после съемки в
графическом редакторе.
Вот такой это противоречивый параметр — количество мегапикселей.
Итог этой части наших исследований:
— Чем больше физический размер матрицы, тем
лучше ВСЕГДА.
— Чем больше мегапикселей, тем тоже лучше, но только при хорошем качестве
оптики и хорошем освещении в момент съемки.
Теперь — о дополнительных параметрах, включая технологические.
Параметры матриц, часть 2. Чувствительность и технологические особенности
Разберем еще такие вопросы:
1.
Чувствительность в единицах ISO.
2. Технология с микролинзами.
3. Технология с обратной засветкой (Back-Side Illumination,
BSI).
Технология с обратной засветкой (Back-Side Illumination,
BSI).
В старину
чувствительность была физическим параметром фотопленки, который по ходу
съемки никак меняться не мог.
В цифровых камерах величина чувствительности может задаваться вручную или
автоматически. При назначении той или иной чувствительности на самом
деле в фотоматрице никаких изменений не происходит. Просто изменяется
коэффициент аналогового усиления сигнала с фотодатчиков перед подачей
его на вход аналого-цифрового преобразователя (аналогично, например, регулировке громкости в плеерах).
Соответственно, и изменения соотношения сигнал/шум тоже не
происходит, т.к. усиливаются одновременно и сигнал, и шум.
В чем же тогда вообще смысл упоминания чувствительности в параметрах камер?
Чем меньше
нижний предел чувствительности, тем более качественные можно получить
фотографии, по крайней мере, для неподвижных объектов. Механизм
повышения качества прост: чем меньше чувствительность, тем больше
выдержка (время накопления сигнала), и тем лучше соотношение сигнал/шум. Для хороших камер
«мобильников» нижний предел обычно бывает 50 ISO.
Механизм
повышения качества прост: чем меньше чувствительность, тем больше
выдержка (время накопления сигнала), и тем лучше соотношение сигнал/шум. Для хороших камер
«мобильников» нижний предел обычно бывает 50 ISO.
А чем выше верхний предел, тем больше возможностей получить хоть какое-то изображение при слабом освещении (правда, вместе со всеми полагающимися шумами). Для хороших камер мобильных устройств верхний предел обычно составляет 3200…6400 ISO. Теоретически, ничто не мешает установить верхний предел и сколь угодно большим, но изображения в этом случае уже не будет — будут лишь шумы со смутными контурами предметов.
Технологические усовершенствования (микролинзы и матрицы «с обратной
засветкой», BSI) появились как борьба с одним
из принципиальных недостатков фотоматриц: светочувствительные пиксели не
могли занимать всю поверхность матрицы; поскольку, кроме них, на
поверхности матрицы располагаются транзисторы и соединительные
проводники.
Для устранения этих недостатков внедрили две технологических новинки. Сначала перед пикселями стали располагать собирающие свет микролинзы; а затем светочувствительные пиксели стали располагать не на той стороне подложки, где находятся проводники и транзисторы, а на обратной. В результате схематично современная фотоматрица выглядит «в разрезе» примерно так:
(изображение взято из чешского раздела Википедии)
Итог второй части наших исследований:
— Пределы возможных значений чувствительности не принципиальны, но желательно, чтобы они были хотя бы в диапазоне 80…3200 ISO, либо в более широком в ОБЕ стороны (и вниз, и вверх).
—
Технологические особенности (микролинзы, матрица с обратной засветкой)
сейчас используются практически для всех камер мобильных устройств,
начиная со среднего ценового диапазона, и рассматривать их как
преимущество смысла нет. Для устройств на «вторичном рынке»
использование этих технологических особенностей
может быть весомым аргументом «за».
Для устройств на «вторичном рынке»
использование этих технологических особенностей
может быть весомым аргументом «за».
Остальные параметры матриц в этой статье рассматривать не будем, так их очень много (десятки!), а производителями мобильных устройств они все равно не упоминаются.
Типовые дефекты снимков из-за проблем оптической системы
Хотя снаружи в
камерах смартфонов и планшетов видно только одну очень маленькую линзу,
на самом деле это — только вершина айсберга под названием «объектив». Объектив устроен очень
сложно и имеет несколько линз и
несколько диафрагм (подробнее — в статье
«Устройство камеры
смартфона»). Все эти «навороты» нужны для борьбы с геометрическими и
цветовыми искажениями, а также для обеспечения равномерности фокусировки
по полю матрицы.
Рассмотрим типовые примеры, что бывает, когда оптика камеры смартфона несовершенна.
Случай №1. Неравномерность цвета («цветовое виньетирование»):
(кликнуть для увеличения)
Обратите внимание, что на фотографии центр снимка имеет явственный розовый оттенок, а края — зеленый. Но это — не единственная проблема этого снимка. Переходим к случаю №2.
Случай №2. Зоны нерезкости на снимке.
Если увеличить приведенный выше снимок до 100%, то можно заметить, что в правом верхнем углу «картинка» гораздо более «размыта», чем на всех остальных частях кадра. Посмотрим, для сравнения, на увеличенные до 100% фрагменты из левого верхнего угла и из правого верхнего:
Данная проблема
является следствием элементарной геометрической «кривизны» в каком-то из
элементов оптической системы. Причем дислокация зоны нерезкости и вообще
её наличие могут меняться от экземпляра к экземпляру телефона одной и
той же модели.
Причем дислокация зоны нерезкости и вообще
её наличие могут меняться от экземпляра к экземпляру телефона одной и
той же модели.
Но следует иметь в виду, что сам по себе факт снижения резкости по краям снимка еще не является дефектом. Такое явление свойственно почти всем камерам «мобильников», кроме самых дорогих. Дефектом является аномальное ухудшение резкости в какой-либо отдельной области снимка.
Два только что описанных дефекта никак не следуют из технических параметров камеры смартфона. Их можно обнаружить, только внимательно просматривая тестовые фотографии в обзорах устройств.
Параметры оптической системы
А теперь
разберем те параметры оптической системы, которые производители
смартфонов обычно указывают в технических характеристиках устройств.
Чаще всего таких параметров — немного, всего два: относительная диафрагма (светосила) и количество элементов оптической системы. Но бывает, что к ним еще добавляют фокусное расстояние объектива, угол зрения, величину оптического и электронного зума, и, иногда, еще какую-нибудь второстепенную «мелочевку».
Начнем с количества элементов оптической системы. Количество элементов, теоретически, чем больше — тем лучше; ибо каждый элемент должен как-то улучшать изображение. При этом надо помнить, что количество элементов не означает количество линз; в число элементов входят и диафрагмы. Но абсолютно прямой связи между числом элементов и качеством изображения всё-таки нет.
Насчет же первого из упомянутых параметров — относительной диафрагмы — поговорим поподробнее.
Относительная диафрагма обозначается буквой F
и числом, получается выражение вида, например, F/1. 8 .
Это число обозначает, во сколько раз эффективное значение
величины отверстия для прохождения света МЕНЬШЕ «идеального». Под «идеальным»
понимается освещенность мишени объективом без потерь, диаметр которого
равен фокусному расстоянию.
8 .
Это число обозначает, во сколько раз эффективное значение
величины отверстия для прохождения света МЕНЬШЕ «идеального». Под «идеальным»
понимается освещенность мишени объективом без потерь, диаметр которого
равен фокусному расстоянию.
Поскольку в объективе всегда присутствуют потери, а также расстояние от передней линзы не совпадает с фокусным расстоянием объектива в целом, то значение F всегда больше 1. Причем, поскольку количество пропускаемого света пропорционально не линейному размеру, а площади отверстия, то оно уменьшается пропорционально КВАДРАТУ числа F/.
Принципиальное отличие диафрагмы в камерах мобильных устройств от
«настоящих» фотоаппаратов состоит в том, что в мобильных устройствах она
— не регулируется (т.е. фиксированная величина). А в настоящих
фотоаппаратах она может физически изменяться за счет сжатия или
расширения образующих её лепестков.
С точки зрения качества фотоснимков, чем число в знаменателе выражения F/x.x у камеры «мобильника» меньше, тем лучше; поскольку это означает бОльший световой поток на матрице и лучшее соотношение сигнал/шум.
У лучших камер мобильных устройств относительная диафрагма составляет от F/2.0 до F/1.7, у остальных — от F/2.2 и выше. Меньше знаменатель — лучше.
Но, если камера имеет оптический зум, то величина F/ может меняться даже несмотря на то, что диафрагма в камерах мобильных устройств — фиксированная. Это происходит из-за того, что положение линз при увеличении зума меняется таким образом, что оптический центр объектива удаляется от матрицы, и её освещенность падает. Соответственно, изменяется и число F/ (относительная диафрагма).
Остальные
параметры — менее значительны, да и не всегда упоминаются
производителями.
Фокусное расстояние объектива само по себе ни о чем не говорит, но совместно с размером матрицы оно определяет угол зрения. Для большинства тыловых (основных) камер угол зрения (поле зрения) составляет 65-75 градусов, для фронтальных камер — до 90 градусов. При выборе «мобильника» на этот параметр не надо обращать внимания. Правда, если Вам, например, нужна непременно широкоугольная камера, то есть смысл обратить внимание на некоторые модели смартфонов с несколькими камерами, в число которых входит и широкоугольная типа «рыбий глаз».
Проблемы программной обработки фотоснимков
Перед тем, как
мы увидим фотографию, смартфон (планшет) её основательно обрабатывает
программно на уровне прошивки, приводя к «удобоваримому» виду.
Подавляющее большинство этих операций — линейные; то есть, представляют
собой необходимую корректировку яркости, контрастности, цветности, и
интерполяцию, если разрешение снимка установлено пользователем не
совпадающим с разрешением матрицы.
Как выглядят необработанные фотографии в том виде, в каком они приходят с матрицы в смартфон, можно на тех смартфонах, где имеется возможность сохранения фото в RAW (это и есть необработанный формат):
(исходный файл в RAW (DNG) можно скачать
здесь, 23 Мб)
Эта фотография имеет бледные цвета, неравномерную яркость (кажется, что небо в центре вокруг храма светлее, но это — не чудо, а дефект), и еще кое-какие недостатки. Смартфон это выправляет, обработанная смартфоном фотография выглядит так:
По поводу
неравномерной яркости изображения надо еще добавить, что она отражается
и на уровне шумов. Яркость изображения снижается примерно в 1.6 раза к
краям, и в 2.2 раза — к углам изображения относительно центра. Отсюда
следует, что чем дальше от центра — тем уровень шумов на фотографии
будет выше, а четкость — ниже. Соответственно, эти явления надо считать
в определенной мере естественными.
Правда, к ухудшению четкости может свою лепту добавить и кривизна оптики.
В этом случае расположение мест ухудшения четкости будет несимметричным,
см. предыдущий пример фотографии.
Но, кроме линейных операций при обработке таких фото, есть и две нелинейные операции, когда смартфон (планшет) сами дорисовывают на снимке то, чего на нем не было (или убирают то, что было). Эти операции — «шарпинг» и «шумодав».
Начнем с «шарпинга»
(дословно с английского — «обострение»).
«Шарпинг» — это операция
подчеркивания контуров предметов на снимке.
Алгоритм её работы, не вдаваясь в математические подробности,
таков: обнаружить контуры предметов, и сделать их более четкими. А для
этого — светлую сторону контура сделать светлее, а темную — темнее.
А для
этого — светлую сторону контура сделать светлее, а темную — темнее.
Вот пример «правильной» работы шарпинга:
Посмотрите на фрагмент снимка в масштабе 100%:
Если ОЧЕНЬ хорошо присмотреться, то можно заметить вокруг темной части купола церкви светлую полоску на фоне неба. Толщина этой полоски — всего несколько пикселей. Это и есть «правильная» работа шарпинга — когда она почти не заметна.
А теперь посмотрим пример «неправильной» работы шарпинга:
Посмотрите на фрагмент из левого верхнего угла снимка в масштабе 100%:
Небо и некоторые
части здания усыпаны точечками, завитушками и полосочками. Их создал
шарпинг, пытаясь подчеркнуть контуры несуществующих предметов; за
которые он принял, скорее всего шумы и мелкие неравномерности фона.
Их создал
шарпинг, пытаясь подчеркнуть контуры несуществующих предметов; за
которые он принял, скорее всего шумы и мелкие неравномерности фона.
В результате картинка получилась с сильными искажениями.
Аналогичные дефекты могут сопровождать и работу «шумодава».
Система шумоподавления должна (по идее) убирать мелкие крапинки,
возникающие на равномерном фоне из-за шумов; особенно — в условиях
пониженного освещения.
Но на практике часто этот алгоритм работает туповато и начинает
«размазывать» мелкие детали на вполне нормальном снимке с хорошим
освещением.
Посмотрим на пример ошибочной работы «шумодава»:
Посмотрите на фрагмент центральной части снимка в масштабе 100%:
На этом
фрагменте отлично видно, что высококонтрастные части снимка получились
хорошо; а те места, где находится повышенная концентрация небольших
малоконтрастных деталей (веток деревьев), «размазаны» системой
шумоподавления, поскольку ошибочно приняты за шум.
Также к ошибкам в программной обработке можно отнести и некоторые дефекты в цветопередаче.
Вариантов в ошибках цветопередачи может быть два: ошибочный цветовой баланс фотографии и низкая насыщенность цветов.
Так выглядит фотография со смещением цветового тона в сторону «тёплых» цветов:
Дефект цветового баланса признаётся таковым только в том случае, если он проявляется на фотографиях систематически. Если же он появляется на фото только иногда, то это — случайное отклонение, вызванное, как правило, специфическими условиями освещения в момент съёмки; и в «зачёт» как дефект не идёт.
Второй дефект программной обработки — низкая цветовая насыщенность — выглядит на фото так:
Сначала
даже кажется, что эта фотография — чёрно-белая. Но приглядевшись, потом
замечаешь, что трава — чуть-чуть зелёная. 🙂
Но приглядевшись, потом
замечаешь, что трава — чуть-чуть зелёная. 🙂
Справедливости ради надо сказать, что последние два дефекта (цветового баланса и цветовой насыщенности) встречаются очень редко.
Дефекты в программной обработке никак не следуют из технических параметров камеры; их можно обнаружить, только просматривая тестовые фотографии в обзорах.
Как выбрать смартфон с хорошей камерой?
Итак, разобрав отдельные аспекты теории и практики, пора перейти к полезному применению полученных знаний.
Каков же алгоритм поиска смартфона с хорошей камерой?
Порядок действий будет примерно таким.
1.
Выбрать для детального анализа несколько смартфонов, у которых есть
положительная репутация по части камер; или же производители сами
заявили о таковой (иногда им можно верить 🙂 ).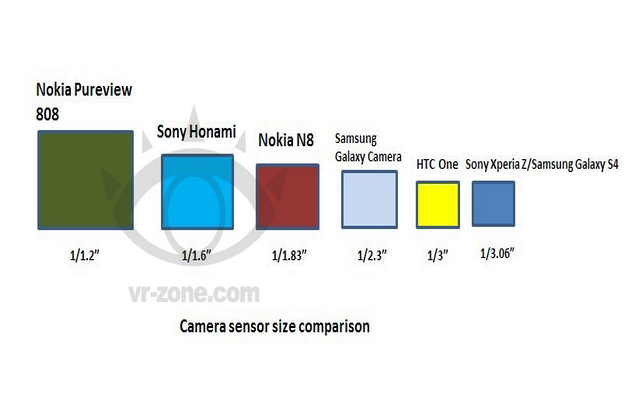 Скорее всего, это будут смартфоны не ниже среднего
ценового диапазона и с разрешением основной камеры строго выше 10 Мпикс.
Скорее всего, это будут смартфоны не ниже среднего
ценового диапазона и с разрешением основной камеры строго выше 10 Мпикс.
2.
Попытаться найти информацию о том, какой тип камеры (сенсора) установлен
в смартфоне (смартфонах). Обычно эта информация публикуется на
официальных сайтах производителей смартфонов. Если там не удалось найти
такую информацию, можно попытаться найти её на сайте
kimovil.com (найдя там характеристики заинтересовавшего смартфона).
Определить тип камеры в смартфоне (планшете) «постфактум» (после
приобретения) можно с помощью утилиты «Device Info
HW», загрузив её на устройство из магазина приложений
Play Market (для устройств на ОС
Android); подробнее — в следующей главе.
3.
Далее по типу камеры (сенсора) найти её технические характеристики. Это можно
сделать как через поисковики в интернете, так и на официальных сайтах и в
англоязычной Википедии. Вот несколько полезных ссылок для сенсоров
наиболее известных производителей:
SONY (Википедия),
SONY (сайт производителя),
OmniVision (сайт производителя),
Samsung (сайт производителя),
Samsung (Википедия). Список других производителей (в т.ч. китайских)
-
здесь.
Вот несколько полезных ссылок для сенсоров
наиболее известных производителей:
SONY (Википедия),
SONY (сайт производителя),
OmniVision (сайт производителя),
Samsung (сайт производителя),
Samsung (Википедия). Список других производителей (в т.ч. китайских)
-
здесь.
4.
В найденных технических параметрах камеры (сенсора) в первую очередь
следует обратить внимание на физический размер матрицы. При равенстве
примененных технологий чем размер матрицы больше, тем лучше получается
изображение как по детализации, так и по уровню шумов.
На число мегапикселей обращать внимание следует во вторую очередь,
это менее критичный параметр. Большее количество мегапикселей позволяет
получить снимки с лучшей детализацией при хорошем освещении, но с
большими шумами при пониженном освещении.
Следует также иметь в
виду при этом, что в графических редакторах из изображения с большим количеством
пикселей всегда можно получить изображение с меньшим (с попутным
уменьшением уровня шумов), а обратная операция приводит только к потере
резкости и размытию контуров.
5. Найти обзоры выбранного смартфона (смартфонов) с примерами полноразмерных фотографий (без сжатия размера). Далее желательно проанализировать те из них, в которых содержится максимальное число мелких деталей. Следует обратить внимание на типовые дефекты, перечисленные выше в статье: цветовое виньетирование, наличие областей нерезкости, чрезмерная работа шарпинга и/или шумодава. Если уровень этих дефектов велик, то отбрасываем данный смартфон из рассмотрения. Возвращаемся к пункту 1. 🙂
6.
Предпоследний пункт, «факультативный» (не обязательный). Рассмотреть
возможность приобретения смартфона со сдвоенной камерой. Предназначения
сдвоенной камеры могут быть различные.
Рассмотреть
возможность приобретения смартфона со сдвоенной камерой. Предназначения
сдвоенной камеры могут быть различные.
Если вторая камера — черно-белая, то это позволяет улучшить
соотношение сигнал/шум для съемок при пониженном освещении или же
сделать качественные черно-белые (монохромные) фотографии.
Также вторая камера может быть и цветной, но с другим разрешением
и/или углом зрения. Такие камеры используются обычно используются для
определения переднего и заднего плана и создания «эффекта боке»
(размытия заднего плана).
Еще один вариант — когда вторая камера имеет большее фокусное
расстояние, чем первая. В этом случае она дает оптическое увеличение
объектов и используется для создания оптического зума.
Есть ещё и смартфоны с эффектом, обратным предыдущему, т.е. когда
вторая камера имеет меньшее фокусное расстояние и делает снимки в стиле
«рыбий глаз».
И, наконец, последний вариант — когда вторая камера установлена
«для красоты» и полезности в виде улучшения качества снимков или
создания творческих эффектов не приносит. Этим грешат, как обычно,
смартфоны дешевых китайских производителей.
7. И последний пункт, тоже факультативный. Изучить по обзорам
наличие и работу системы стабилизации изображения: эта система поможет
уменьшить «субъективные» факторы ухудшения качества снимков, в первую
очередь из-за дрожания камеры.
Как определить, какая камера установлена в Вашем смартфоне (планшете)?
Для
смартфонов на системе Android существует
отличная утилита, показывающая тип установленных камер (точнее — их
сенсоров). Она называется «Device Info
HW» и устанавливается легко
и непринужденно из магазина приложений
Play Market (бесплатно). Утилита считывает из смартфона (планшета) конфигурационную
информацию и представляет её в удобочитаемом виде.
Утилита считывает из смартфона (планшета) конфигурационную
информацию и представляет её в удобочитаемом виде.
Раздел «Камера» в этом приложении выглядит так:
(кликнуть для увеличения)
Верхняя часть таблицы
показывает реальные (аппаратные) параметры камер, а нижняя часть —
программные (интерполированные). От более высоких интерполированных
параметров полезности нет, так как пока что такие алгоритмы детализации
добавить не могут (хотя в Google и работают
над этой проблемой — как «дорисовать» на фотографии то, чего на ней нет
🙂 ).
Также эта диагностическая утилита определяет наличие вспышек при
камерах и показывает эту информацию в таблице. Эта возможность может
быть интересна в связи с тем, что известны случаи, когда в некоторых
смартфонах вспышка для фронтальной камеры была «муляжом», т. е. реально
не работала. Эта утилита в таких случаях показывает пользователю, что
реально там вспышки нет, и не надо мучиться и пытаться заставить её
работать. 🙂
е. реально
не работала. Эта утилита в таких случаях показывает пользователю, что
реально там вспышки нет, и не надо мучиться и пытаться заставить её
работать. 🙂
В приведенном примере основная (тыловая) камера
— Samsung S5K3P3,
имеет разрешение в 16 мегапикселей;
фронтальная камера -
SuperPix SP8407, разрешение — 8 мегапикселей.
К сожалению, утилита не всегда может показать модель сенсора, особенно для платформ Qualcomm (qcom). В некоторых случаях для доступа к соответствующей информации в смартфоне могут потребоваться права ROOT, которые, в свою очередь, не для всех моделей удается получить. Также надо иметь в виду, что при получении прав ROOT могут отказаться работать системы бесконтактных платежей — с их точки зрения, это — нарушение правил безопасности.
Правда, в этом случае утилита может показать список совместимых камер, а
уже из этого списка есть шанс методом сличения параметров найти ту,
которая и применена.
Другие
производители:
GalaxyCore
(Китай)
Ваш Доктор.
22 февраля 2017 г., с дополнениями от 27 января 2018 г.
Порекомендуйте эту страницу друзьям и одноклассникам
Другие статьи цикла «Как устроен смартфон»:
— Фотосъемка в режиме HDR (High Dynamic Range) в смартфоне. Что это такое, какая польза и когда можно использовать?
— Вскрытие (разборка) камеры смартфона. Устройство камеры смартфона (мобильного телефона).
—
Устройство дисплея мобильного телефона (смартфона) и планшета.
Устройство жидкокристаллического экрана. Типы дисплеев, их отличия.
— Навигация (GPS, ГЛОНАСС и др.) в смартфонах и планшетах. Источники ошибок. Методы тестирования.
- Что такое USB OTG в смартфоне и планшете?
— Вскрытие (разборка) литий-ионного аккумулятора.
В комментариях запрещены, как
обычно, флуд, флейм и оффтопик.
Также запрещено нарушать общепринятые нормы и правила поведения, в том
числе размещать экстремистские призывы, оскорбления, клевету, нецензурные
выражения, пропагандировать или одобрять противозаконные действия. Соблюдение
законов — в Ваших же интересах!
Комментарии вКонтакте:
Комментарии FaceBook:
При копировании (перепечатке) материалов ссылка на источник (сайт SmartPuls.ru) обязательна!
Цифровой цвет и фотоматрица
Цифровой цвет. Первая часть статьи.
Первая часть статьи.
Что происходит со светом, после того, как он попадает на матрицу цифрового фотоаппарата?
Матрица похожа на сетчатку глаза. Не смотря на высокую прецизионность технологий, каждая матрица в своем роде уникальна. И что бы каким-то образом получить приличную адекватность электронной картинки, ученые и инженеры серьезно потрудились.
Конечно, существуют стандарты и производители матриц их четко придерживаются, но как и каждй человек, так и матрицы чуть-чуть по-своему воспринимают цвета. Если в колориметрии пренебрегают таким малым разбросом, так и мы не будем более на него обращать внимание.
Мы не будем рассматривать цветовые искажения в аналоговом тракте фотоаппарата, например – хроматическую аберрацию, наша тема – цифровой цвет.
Какие же характеристики важны для «электронной сетчатки»?
Первая – цветовой охват.
Помните диаграмму цветности xyY из предыдущей статьи? А цветовое пространство человека в системе xyY? Эта трехмерная фигура, расположенная в соответствующей координатной системе и будет определять, какие цвета матрица или любое другое устройство (от фотопленки до монитора) может воспринять или воспроизвести. Чем больше объем этой фигуры – тем больший цветовой охват.
Чем больше объем этой фигуры – тем больший цветовой охват.
Цветовой охват человеческого глаза на сегодня недостижим ни для одного из существующих типов сенсоров.
Примерное представление может дать рисунок: самая большая фигура – примерный (к сожалению, под рукой не оказалось точного профиля на человека) охват человеческого зрения, внутри него – охват стандарта sRGB (на него сейчас ориентируются все массовые мониторы и цифровые фотокамеры). Внутри sRGB – синяя область – это охват Фотобумаги Kodak Professional. Видите, как уменьшается цветовой охват по мере перехода от реального изображения к фотографии?
Вторая характеристика – число воспринимаемых (воспроизводимых) цветов.
Она определяет сколько элементов (цветов) внутри области охвата способно различить устройство.
Охват может быть и большим, но если число воспринимаемых цветов (битность цвета) мало, то изображение будет как-бы постеризованное, с резкими переходами на цветовых градиентах. Обычно чем больше область цветового охвата, тем больше число различимых цветов.
Обычно чем больше область цветового охвата, тем больше число различимых цветов.
Пожалуйста не путайте цветовой охват, кол-во воспринимаемых цветов ( «цветовое разрешение») и разрядность ( «битность») итогового изображения.
Форматы файлов в фотокамерах
Камера (в зависимости от модели) может сохранять снимок в файлах различного формата.
Если Вы еще не сталкивались с компьютерными графическими файлами, коротко расскажу о том, что это такое. Есть два принципиально различных способа записи изображения — векторное и растровое. Первый к цифровому фото не имеют прямого отношения, т.к. изображения там представлены в виде наборов геометрических фигур, заданных формулами. Вторые – растровые как раз то, с чем мы и будем иметь дело.
Что такое растровый файл?
Это двухмерная матрица или таблица, где каждая ячейка – это элемент изображения – пиксел, который характеризуется цветом. Цвет можно записать в любой системе (см. предыдущую статью). В силу того, что большую часть цифровых изображений мы рассматриваем с помощью мониторов, это – RGB, т.е. три набора чисел – три канала. Чем выше разрядность канала, тем больше информации о цвете пикселя можно сохранить, но тем больше размер файла. Именно поэтому стараются придумать всяческие ухищрения – алгоритмы сжатия, дабы размер файла сократить.
В силу того, что большую часть цифровых изображений мы рассматриваем с помощью мониторов, это – RGB, т.е. три набора чисел – три канала. Чем выше разрядность канала, тем больше информации о цвете пикселя можно сохранить, но тем больше размер файла. Именно поэтому стараются придумать всяческие ухищрения – алгоритмы сжатия, дабы размер файла сократить.
Самый распространенный (но отнюдь не самый простой) – JPEG. Этот формат предусматривает сжатие информации с потерями. Вдаваться в подробности не будем. Заметим, что сжатие происходит за счет усреднения информации о цветности и яркости в группах соседних пикселей. Такое возможно из-за несовершенства зрительной системы человека: нерезкие изменения цветности или яркости глаз не распознает.
Главный вывод: JPEG предназначен для просматриваемых человеком изображений. Он НЕ подходит в качестве рабочего формата (для кардинального редактирования). Т.е. если Вы сняли кадр в JPEG, немного отредактировали цветовой баланс, яркость и контраст, а затем отнесли в минилаб для печати – все ОК. Но если вы собираетесь в дальнейшем неоднократно редактировать что-то в файле, выправить грубые ошибки экспозиции, качественно подавить шумы – формат JPEG не подходит. При каждом пересохранении в нем происходит накопление ошибок сжатия с потерями: уменьшается резкость (визуальное разрешение файла), сокращается количество цветов, появляются хорошо видимые глазом артефакты сжатия (мозаичность изображения).
Но если вы собираетесь в дальнейшем неоднократно редактировать что-то в файле, выправить грубые ошибки экспозиции, качественно подавить шумы – формат JPEG не подходит. При каждом пересохранении в нем происходит накопление ошибок сжатия с потерями: уменьшается резкость (визуальное разрешение файла), сокращается количество цветов, появляются хорошо видимые глазом артефакты сжатия (мозаичность изображения).
Уж если Ваша камера позволяет сохранять только в JPEG или Вы по какой-то причине сняли кадр в JPEG, то для последующего редактирования сохраните его в родном формате Photoshop (PSD) или TIFF… да в любом формате сжатия БЕЗ потерь (BMP, PNG, TGA).
Этот формат представляет непосредственный слепок информации с матрицы камеры. У каждой фирмы и класса камер он свой. Если камера поддерживает такой формат, то обязательно в софте, поставляемом с камерой есть конвертор, который, во-первых сможет перевести информацию в удобоваримый формат (обычно TIFF и JPEG), а во-вторых подправить баланс белого, яркость, контраст, цветовой баланс и применить ряд фильтров. Обычно конвертор дублирует все функции обработки изображения в камере, включая малоприменимые эффекты типа сепии.
Обычно конвертор дублирует все функции обработки изображения в камере, включая малоприменимые эффекты типа сепии.
Формат «одноразовый»: т.е. пересохранить файл в него нельзя. Это аналог пленочного негатива – эдакий цифровой негатив. Я все важные или сложные по условиям съемки кадры стараюсь снимать именно в RAW. Потом сохраняю эти файлы как исходники, а работаю уже в PSD.
Для Adobe Photoshop есть «родной» плагин, позволяющий читать RAW-форматы большинства камер. Однако не всегда он лучше родных конверторов. Скажем Canon FileViewer эффективно подавляет шумы и дает более сочные цвета, чем «адобовский» плагин.
Формат, позволяющий выбрать алгоритм сжатия, в т.ч. и полностью его отключить. Для обеспечения совместимости обычно используют TIFF без сжатия и дополнительных каналов, т.е. аналог BMP. Однако TIFF хорошо поддерживает 16-битные изображения. Иногда сами фотокамеры предлагают записывать файл в этом формате, как альтернативном JPEG.
Профайлы
Вот о них, родимых, все почему-то и забывают. Профайл как раз и описывает цверовые характеристики устройства и еще ряд параметров, необходимых для того, чтобы при дальнейшей обработке файла можно было четко сказать какого цвета тот или иной пиксель. Иными словами – профайл характеризует устройство на котором было получено изображение.
Профайл как раз и описывает цверовые характеристики устройства и еще ряд параметров, необходимых для того, чтобы при дальнейшей обработке файла можно было четко сказать какого цвета тот или иной пиксель. Иными словами – профайл характеризует устройство на котором было получено изображение.
Еще раз: БЕЗ профайла графический файл информации о цвете НЕ несет.
Цвет – это не набор байтов в трех каналах. Цвет – это психофизиологичекое ощущение, которое более-менее увязали со спектральным составом цвета, падающего на сетчатку. Если не связать численные коды цвета пикселя со спектром, цвет мы не определим. А профайл как раз и позволяет осуществить такую связь, но уже в компьютере.
Про профайлы и системы управления цветом можно написать большую статью и не одну. Пока замечу лишь одно. В последние годы стандартом принят sRGB. Профиль, описывающий этот цветовой охват установлен по-умолчанию с 7-й версии Photoshop, прикрепляется к снимкам большинства массовых цифровых камер, новые мониторы и принтеры настраиваются под него.
Так что, если «ничего не трогать», а главное – если нет необходимости экспериментировать с выбором других профилей и охватов, то все должно быть ОК. Если таковая необходимость есть – нужно основательно изучать литературу по цветопередаче.
Допечатная обработка
…обычно выполняется дома… обычно в Adobe Photoshop, ставшим чуть ли не индустриальным стандартом. Что у нас дома? Обычный монитор дюймов на 17 – 19. Что есть монитор – устройство отображения. В цветовом плане он, как и матрица фотоаппарата имеет цветовой охват и цветовое разрешение.
Здесь же замечу, что для «художественной» работы с фото более подходит монитор с электронно-лучевой трубкой, а не TFT. Потому что технология изготовления трубок достигла совершенства, а TFT-матрицы все еще развиваются. Поэтому цветовое разрешение и цветовой охват у традиционных «трубочных» мониторов лучше. Заметно лучше. TFT не может воспроизводить цвет и яркость во всех направлениях одинаково, как трубка. Оператору достаточно немного наклонить голову, и картинка сразу меняет цвет, яркость, контраст. Где уж тут до тонких настроек!
У монитора тоже есть профайл, думаю, Вы об этом уже догадались. Его нужно обязательно подключить к системе: (Свойства экрана, Дополнительно, Управление цветом). Рекомендую – откалибровать и одновременно получить более точный профайл в программе Adobe Gamma. Профайлы от производителя – усреднение по ряду моделей. Верх совершенства – программно-аппаратные комплексы по калибрации мониторов. Но это дорого и необоснованно для непрофессиональной работы.
Монитор, на котором обрабатывают фото для цифровой печати настоятельно рекомендуется отрегулировать на цветовую температуру в 6500К, после чего вновь откалибровать и получить профайл.
При кардинальном изменении освещения в помещении и не реже раза в год производить повторные калибровки монитора. За год интенсивного использования могут уплыть параметры люминофоров.
Цифровая печать в фотосервисе
Каким образом цифровые минилабы обращают файл с изображением в отпечаток на фотобумаге? Цифровых минилабов сейчас довольно много, но подходов к формированию изображения на фотобумаге несколько. Рассмотрим основные из их.
Рассмотрим основные из их.
Первый заключается в использовании трех лазеров (источники излучения высокой спектральной чистоты, т.е. монохромного излучения) основных цветов: красный, зеленый и синий. Они смешиваются в необходимых пропорциях в оптической системе минилаба и благодаря вращающейся оптической призме построчно экспонируют фотобумагу. На этом этапе происходит традиционный аддитивный синтез. Основное преимущество такого подхода по сравнению с прочими состоит в том, что каждая точка изображения формируется практически идеальным источником света, что обеспечивает очень хорошую однородность цвета и яркости по всему полю фотографии.
Второй подход использует линейки светоизлучающих элементов, обычно светодиодов. По линейке на каждый основной цвет. Т.е. никакой строчной развертки и вращающейся призмы нет – это несколько упрощает и удешевляет конструкцию. Однако каждый из элементов линейки обладает уникальными световыми характеристиками, поэтому время от времени печатающие узлы требуют калибровки. Ясно, что, не смотря на калибровку, однородность по полю фотографии проигрывают «лазерному», да и пятно лазера меньше по диаметру, что позволяет иметь наивысшее разрешение.
Ясно, что, не смотря на калибровку, однородность по полю фотографии проигрывают «лазерному», да и пятно лазера меньше по диаметру, что позволяет иметь наивысшее разрешение.
Третий подход — разновидность второго подхода – использование в линейке не светоизлучающих элементов, а миниатюрных заслонок (световых микроклапанов), которые срабатывают от электронных импульсов и в нужный момент пропускают необходимое количество света от источника опорного цвета (лампа и сменные светофильтры). Однородность изображения выше, но сложнее конструкция. Высокое разрешение – не конек такой системы.
Четвертый поход — вместо заслонок – микрозеркала, а вместо линеек – матрица. Т.е. фотобумага экспонируется не построчно, а за три раза – для каждого из основных цветов. Плюсы: однородность по полю изображение. Минусы: низкое разрешение.
Пятый подход похож на применяемый в обычном мониторе на базе электроннолучевой трубки. Только монитор этот плоский, всего в одну строку. Изображение рисуется на этой единственной строке электронным лучом по мере движения фотобумаги вдоль трубки. Чтобы луч не рассеивался в стекле по дороге к эмульсии фотобумаги, экспонирующая поверхность трубки состоит из оптических волокон. Разрешение такой метод дает солидное — до 500dpi, но требует калибровки, т.к. люминофору свойственна неоднородность и уплывание параметров с течением времени.
Изображение рисуется на этой единственной строке электронным лучом по мере движения фотобумаги вдоль трубки. Чтобы луч не рассеивался в стекле по дороге к эмульсии фотобумаги, экспонирующая поверхность трубки состоит из оптических волокон. Разрешение такой метод дает солидное — до 500dpi, но требует калибровки, т.к. люминофору свойственна неоднородность и уплывание параметров с течением времени.
Шестой подход напоминает о цифровых проекторах. Изображение формируется на базе жидкокристаллической матрицы, работающей на просвет. Матрица одна, один источник света и три светофильтра. Последовательно меняются светофильтры и изображение (черно-белое) на матрице – опять же аддитивны синтез. Применяется хитрость для сглаживания пикселизации: при каждой смене светофильтра матрица, расположенная под небольшим углом к плоскости фотобумаги поворачивается вокруг своей оси.
Что выбрать – это самая серьезная проблема владельцев цифровых минилабов. Но простому пользователю неплохо представлять всю эту кухню и понимать, что высокое разрешение и однородность цвета и яркости по всему полю фотографии требуют дорогих технических решений, а это определяет и конечную стоимость одной фотографии.
На фотографии с вечеринки размера 10х15 с 2Мп камеры Вы вряд ли сможете заметить отличие вышеописанных технологий. Стоит ли тогда переплачивать?
А если это студийный снимок 20х30 с 6Мп? Стоит подумать о лазерной технологии… кстати говоря, для таких машин нужна специальная фотобумага. На фотобумаге пригодной для обычного аналогового минилаба снимок может не только не показать преимуществ лазерной технологии, но и вообще не получиться. Это обстоятельство связано в первую очередь с очень короткими импульсами (порядка единиц наносекунд) некоторых лазеров, используемых в системе экспонирования фотобумаги и очень узкими спектрами их излучения.
Что еще сказать на последок?
Цветовой охват обычной фотобумаги достаточно узкий. Поэтому приходится ужимать цвета, что бы вписаться во весь диапазон. Обычно для фотографий применяется схема при которой предпочтение отдается цветовым соотношениям и проработке на светлых участках. Не требуйте от операторов пурпурных или ядовито-зеленых цветов на фото, даже если они присутствовали во время съемки. Фотобумага неспособна их воспроизвести, в отличие от люминофоров экрана.
Белый цвет на фотобумаге немного желтоват (теплого тона), к этому нужно быть готовым. Включите 6500К на мониторе. После часа работы в таком режиме попробуйте на минуту переключиться в 9300К, а потом обратно. Видите как относителен белый цвет?
Что бы не возникало проблем с цветом на цифровых фотоснимках, как минимум необходимо:
- Понимание, что цвет – это, прежде всего субъективное ощущение, а уже потом физическая величина.
- Знание такого факта, как зависимость цвета предмета от цвета источников освещения. Под лампой накаливания и под ярким солнцем цвета на фотографии будут заметно отличаться.
- Наличие правильно откалиброванного монитора.
- По-умолчанию или верно измененные настройки системы управления цветами Windows и Adobe Photoshop (или любого в котором Вы работаете)
- Взаимопонимание с работниками минилаба — либо Вы полностью доверяете цветокоррекцию оператору, либо за небольшую плату корректируете цветопередачу снимков вместе.

- Понимание того, во сколько цветовой охват фотокамеры меньше цветового охвата глаза, а цветовой охват фотобумаги меньше цветового охвата фотокамеры, а хорошего монитора – и подавно.

Автор: Илья Бесхлебный © 2003г.
28.02.2013
Что такое пиксели в фотоаппарате и сколько их нужно?
Если вы разбираетесь в фотографии и немного в смартфонах, то мы вас поздравляем и для вас эта статья будет скорее напоминанием. Если же вы, как говорится, «чайник» в этом деле, то читайте дальше.
Что такое мегапиксель? Проще говоря, мегапиксель — это один миллион пикселей. Поэтому, если вы знаете разрешение изображения, вы можете рассчитать сколько в нем мегапикселей.
У многих современных смартфонов разрешение экрана составляет 1080 на 1920 пикселей. Таким образом снимок достаточной четкости будет иметь 1920 х 1080 = 2.073.600 пикселей или 2 Мп.
Так что для нормального видеообщения веб-камер на 2 Мп хватает с лихвой.
Принимая во внимание эту простую информацию, подумайте нужен ли вам смартфон с огромным количеством мегапикселей в камере? Пример выше показывает, что много мегапикселей не имеют никакого значения, если вам нужно просто постить фотографии в тот же Instagram или другие соцсети. Число мегапикселей, взятых отдельно от других характеристик камеры, не является гарантией получения фото высокого качества. На самом деле мегапиксели играют роль только в двух случаях.
Число мегапикселей, взятых отдельно от других характеристик камеры, не является гарантией получения фото высокого качества. На самом деле мегапиксели играют роль только в двух случаях.
1. Если вам нужно распечатать фотографию
Как известно, печать фотографий значительно потеряла в популярности с пришествием цифровой фотографии. Большинство людей вполне довольны, загружая фото в интернет или сохраняя их цифровые копии на флешках и в облачных хранилищах.
Про печать уже почти никто не задумывается. В случае, если вам все-таки нужно распечатать удачный снимок, то здесь и стоит задуматься о мегапикселях.
Чем больше пикселей в исходном изображении, тем более четкое изображение получится на выхода не фотобумаге.
В этой таблице представлено каким будет качество распечатанных фото, исходя из соотношения количества мегапикселей камеры и размера фотографий.
| Очень плохо | Очень плохо | Очень плохо | Очень плохо | Очень плохо | Очень плохо |
| Хорошо | Нормально | Плохо | Плохо | Очень плохо | Очень плохо |
| Отлично | Отлично | Хорошо | Хорошо | Плохо | Очень плохо |
| Отлично | Отлично | Отлично | Хорошо | Нормально | Очень плохо |
| Отлично | Отлично | Отлично | Отлично | Нормально | Плохо |
| Отлично | Отлично | Отлично | Отлично | Хорошо | Плохо |
| Отлично | Отлично | Отлично | Отлично | Хорошо | Нормально |
| Отлично | Отлично | Отлично | Отлично | Хорошо | Хорошо |
| Отлично | Отлично | Отлично | Отлично | Отлично | Хорошо |
| Отлично | Отлично | Отлично | Отлично | Отлично | Отлично |
| Отлично | Отлично | Отлично | Отлично | Отлично | Отлично |
Когда дело доходит до повседневных потребностей, например печати памятного фото, не требуется более 7 мегапикселей. Даже если размер распечатанной фотографии будет 30х40 см, то из-за относительно большого расстояния просмотра вы не заметите хоть каких-то недостатков. Вы же не будете вглядываться в глянец фотобумаги, правда? В рамочку и на стенку.
2. Если вам нужно обрезать фото
Все уже вроде бы выучили, что при фотографировании не стоит пользоваться цифровым зумом.
В противном случае, какой бы качественной не была камера, а снимок красочным, неправильный зум сделает из него малоприятное зернистое нечто, оставив вас недовольным и камерой и вашим умением фотографировать.
Другое, когда в вашей камере достаточное количество мегапикселей и вы спокойно можете обрезать уже готовое фото без каких-либо опасений по поводу потери качества.
К счастью, камеры в современных смартфонах уже по умолчанию щеголяют с 12 Мп и выше камерами.
Хотя, даже при какой-нибудь 4 Мп камере, вы можете вдвое обрезать ваше фото и поставить на рабочий стол компьютера не боясь ухудшить качество.
Правда состоит в том, что например, камера Yi M1 «всего-лишь» с 20 Мп сделает снимок в разы лучше, чем 41 Мп монстр с посредственными характеристиками.
Товары, которые могут вас заинтересовать:
Global Version означает, что товар выпущен для мирового рынка, и соответствует международным стандартам качества. Ростест — это знак сертификации, который гарантирует, что устройство соответствует всем российским нормам и стандартам по охране окружающей среды и здоровья пользователей. Каких-либо дополнительных отличий или преимуществ перед другими устройствами данный знак не предполагает. Фитнес-браслет Xiaomi Mi Band 4 (черный) (XMSH07HM) Global Version означает, что товар выпущен для мирового рынка, и соответствует международным стандартам качества. Ростест — это знак сертификации, который гарантирует, что устройство соответствует всем российским нормам и стандартам по охране окружающей среды и здоровья пользователей. Каких-либо дополнительных отличий или преимуществ перед другими устройствами данный знак не предполагает. Робот-пылесос Xiaomi Roborock Sweep One (S50/S502-00) (белый) Global Version означает, что товар выпущен для мирового рынка, и соответствует международным стандартам качества. Ростест — это знак сертификации, который гарантирует, что устройство соответствует всем российским нормам и стандартам по охране окружающей среды и здоровья пользователей. Каких-либо дополнительных отличий или преимуществ перед другими устройствами данный знак не предполагает. Смартфон Xiaomi Redmi Note 7 4/64 Gb (Global Version, черный) Global Version означает, что товар выпущен для мирового рынка, и соответствует международным стандартам качества. Ростест — это знак сертификации, который гарантирует, что устройство соответствует всем российским нормам и стандартам по охране окружающей среды и здоровья пользователей. Каких-либо дополнительных отличий или преимуществ перед другими устройствами данный знак не предполагает. Внешний аккумулятор Xiaomi Mi Power Bank 2C (20000 mAh) (PLM06ZM) Global Version означает, что товар выпущен для мирового рынка, и соответствует международным стандартам качества. Ростест — это знак сертификации, который гарантирует, что устройство соответствует всем российским нормам и стандартам по охране окружающей среды и здоровья пользователей. Каких-либо дополнительных отличий или преимуществ перед другими устройствами данный знак не предполагает. Робот-пылесос Xiaomi Roborock Sweep One EU (S55/S552-00) (черный) Global Version означает, что товар выпущен для мирового рынка, и соответствует международным стандартам качества. Ростест — это знак сертификации, который гарантирует, что устройство соответствует всем российским нормам и стандартам по охране окружающей среды и здоровья пользователей. Каких-либо дополнительных отличий или преимуществ перед другими устройствами данный знак не предполагает. Global Version означает, что товар выпущен для мирового рынка, и соответствует международным стандартам качества. Ростест — это знак сертификации, который гарантирует, что устройство соответствует всем российским нормам и стандартам по охране окружающей среды и здоровья пользователей. Каких-либо дополнительных отличий или преимуществ перед другими устройствами данный знак не предполагает. Электросамокат Xiaomi Mijia M365 Electric Scooter (черный, версия EU)
Источник: https://ru-mi.com/blog/chto-takoe-megapiksel-i-pochemu-mnogo-eshhe-ne-znachit-horosho.html
Что такое мегапиксели в фотоаппарате
Что такое мегапиксели и их размер
Один мегапиксель (Мп) состоит из миллиона пикселей, маленьких квадратиков, которые выглядят как крошечные точки. Фотография представляет собой сплошную сетку, сотканную из пикселей. Достаточное количество этих квадратиков улучшает качество изображения, увеличивает его разрешение. Ведь пиксель – это основной элемент, из которого состоит цифровое изображение. Не существует величины меньше пикселя. Например, миллипикселя или 0,5 пикселя. Однако они могут отличаться по размеру.
Большинство современных фотоаппаратов имеет достаточное количество мегапикселей. Как правило, не меньше 15. Когда в фотоаппаратах было 3-4 Мп, их увеличение, хотя бы на один, было очень заметно. Сейчас имеющегося числа вполне достаточно для печати фотографий очень большого размера, и новое увеличение этого показателя больше похоже на маркетинговый ход, чем на необходимость.
На что влияют мегапиксели
От количества Мп в матрице фотоаппарата по сути зависит качество распечатанных фотографий. Снимки большой выглядят детализированней при достаточном количестве мегапикселей. Однако это не единственный показатель, нужный для печати необычно крупных фотографий. Также важны характеристики сенсора фотокамеры и настройки диафрагмы (апертуры).
Важно знать, что пиксели могут отличаться размером. Например, в одной камере может быть 12 Мп большого размера, а в другой – 24, но более маленьких. Слишком мелкие пиксели способны вобрать в себя только небольшое количество света.
Оставшийся свет перемещается к соседним пикселям, создавая на фотографии неприятный цветовой шум. Поэтому важно не только количество мегапикселей, но и размер самой матрицы. Если последняя слишком маленькая и на нее пытаются вместить как можно больше пикселей, качество фото только ухудшится.
Чем больше размер матрицы, тем больше света она воспринимает. В итоге снимки имеют больше деталей и больший угол обзора.
Какое оптимальное количество
Достаточное число пикселей зависит от потребностей пользователя фотоаппарата. Также стоит помнить, что на качество влияют многие технические показатели фотоаппарата, в том числе размер матрицы, выбранный объектив и, конечно, настройки камеры.
Чем больше разрешение матрицы, тем качественнее получатся напечатанные в большом размере снимки и тем больше возможностей для последующей обработки фотографии в фоторедакторе.
- Тем, кто в принципе не печатает и не обрабатывает фотографии, а смотрит их только на цифровых устройствах и выкладывает в сеть, вполне хватит даже 5 Мп;
- Если снимки подвергаются пост обработке, их разрешение несколько уменьшается. Особенно при кадрировании. Значит, чтобы обработать фото и сохранить приемлемое качество для их просмотра на компьютере и печати фотографий небольшого размера, нужен фотоаппарат с 7 Мп. При таком показателе разрешение снимков будет около 3072 на 2304 пикселей. Значит, можно будет смело их обрабатывать, убирать ненужные объекты по краям, не ухудшая итоговые кадры. После этого можно распечатать снимки размером 10 на 15 и даже 20 на 30;
- Тем, кто предпочитает более детализированные снимки, лучше приобретать фотокамеры с разрешением матрицы не менее 12 Мп. Такой фотоаппарат позволит получать кадры, в которых видна каждая деталь, а затем увеличивать и кадрировать их при необходимости. Однако такие фотокамеры стоят дороже, поэтому стоит взвесить все за и против. А также решить, так ли необходима сильная детализация для любительской съемки.
Профессионалам, безусловно, нужны камеры с разрешением не менее 12 Мп. А вот показатель разрешения больше 20 мегапикселей не особенно востребован даже в профессиональных кругах. Это больше рекламные трюки производителей.
Более того, фотографы, проводившие сравнение, указывают на избыточность 24 мегапикселей для фотоаппаратов с кропнутой матрицей. Объективы не справляются с таким количеством пикселей, появляется больше цифрового шума, кадры медленнее обрабатываются из-за большого веса. К тому же, на снимках при 12 и 24 Мп практически идентичная детализация.
Стоит ли гнаться за большим количеством мегапикселей
Профессионалы не советуют гнаться за максимальным количеством пикселей в фотоаппарате. Важнее определиться со своими целями. Для чего приобретается фотокамера: для бытовой съемки, работы в газете или журнале, участии в выставках, съемке портретов, репортажей или торжеств. Для каждой цели понадобится свое количество мегапикселей матрицы фотоаппарата.
Собираясь создавать фото для семейного альбома и соцсетей, не стоит платить лишнее за технику с огромным разрешением снимков. К тому же, на качество больше повлияет физический размер матрицы.
Именно на этот показатель лучше обратить свое внимание. При этом техника с большой матрицей будет дороже, тяжелее, объемнее, чем простой любительский компактный фотоаппарат.
Такую технику неудобно будет постоянно носить с собой, чтобы запечатлеть неожиданно возникшие интересные кадры.
Вредит ли большое число мегапикселей качеству снимков
Увеличение разрешения матрицы может ухудшить резкость кадров даже при использовании качественного объектива.
Это звучит странно, но имеет логическое объяснение. Если физический размер матрицы не увеличивается, а количество мегапикселей становится больше, их размер становится меньше.
Это делает их менее чувствительными к свету и повышает их нагрев друг от друга, увеличивая количество цифрового шума.
Хотя, технологии не стоят на месте и производители научились снижать уровень шума даже при уменьшении размеров пикселей.
Однако есть и другая опасность – появление дифракции. При прохождении потока света через малое отверстие диафрагмы он как будто распыляется, как спрей.
Чем сильнее закрыта апертура (диафрагма), тем под большим углом происходит это распыление. Так четкая точка становится размытой. И чем меньше открыта диафрагма, тем размытие становится сильнее.
Хотя обычно закрытая диафрагма дает максимально четкую детализацию.
Мегапиксели в фотоаппарате отвечают за разрешение фотографий. Выбирая технику, следует заранее решить, для каких целей она будет использоваться. Если в планах фотографа нет печати фотографий очень крупного размера, в профессиональных целях, или серьезной постобработки в фоторедакторе, то количество пикселей не играет особой роли.
В таком случае, возможно, не стоит переплачивать за более дорогие модели. При этом важно обратить внимание на другие технические характеристики фотоаппарата. В первую очередь на размер матрицы. А также научиться его правильно настраивать.
Так, даже при среднем количестве мегапикселей будут получаться интересные и качественные фотографии.
Источник: https://my-photocamera.ru/ustrojstvo/chto-takoe-megapikseli-v-fotoapparate.html
Что такое пиксель, мегапиксель и сколько их нужно для хорошего фото?
Термин пиксель широкую популярность получил вместе с популярностью цифры. Сам термин образован как сокращение слов picture element («элемент изображения»). Речь идет о точках, что образуют картинку, которую мы видим на компьютерном дисплее или экране телевизора. Один кадр, сделанный цифрой, может состоять из нескольких миллионов таких точек.
Любой пиксель состоит из пяти элементов информации. Два отвечают за его координаты: положение по вертикали и положение по горизонтали.
А еще три определяют цвет: яркость красного, яркость синего и яркость зеленого цвета.
Совместно все эти элементы информации позволяют считывающему устройству определить правильный цвет точки и поместить ее в правильном месте на экране. Все пиксели, заполняющие экран, вместе образуют один кадр.
Но еще чаще употребляется термин мегапиксель. Это величина в один миллион пикселей, из которых создается изображение. Обычно в мегапикселях измеряют размер фотографии или отсканированного снимка. Но при выборе фотоаппарата в мегапикселях отображается одна из его существенных характеристик — разрешение матрицы.
В магазине меня убеждали, что чем больше этот показатель, тем будет лучше. Но в действительности оказалось, что количество мегапикселей — отнюдь не самый главный показатель качества аппарата.
Важное значение имеет физический размер матрицы — чем она больше, тем качественнее получится снимок. Даже при одинаковом количестве пикселей качество фотографий с разных фотокамер может оказаться разным. Размер пиксельных ячеек приобретает первостепенное значение по сравнению с их количеством. Чем меньше размер пикселя, тем выше уровень шума изображения.
Depositphotos
Если на матрице с диагональю ½, 5 дюйма реализовать 8 и больше мегапикселей, это обернется постоянным присутствием шума даже при низких значениях светочувствительности. В компактных камерах и большинстве зеркалок нежелательные эффекты сглаживает встроенная программа шумоподавления, но ее вмешательство приводит к замыленности снимка.
Конечно, от количества мегапикселей зависит размер и качество изображения.
Но задумывались ли вы о том, почему большинство фотобанков устанавливает минимальную границу по этому параметру в районе от одного до четырех мегапикселей? Дело в том, что даже двух мегапикселей вполне достаточно, чтобы напечатать хороший снимок формата 10×15, а 4 мегапикселя хватит, чтобы создать качественное фото 20×30.
Кроме того, размер пиксельных ячеек совместно с качеством фотодиодов влияют на такой показатель как динамический диапазон — это способность светочувствительных ячеек матрицы воспроизводить детали объекта в определенном диапазоне ступеней экспозиции. Проще говоря, от этой характеристики зависит, насколько точно может камера передавать оттенки.
Но даже если в фотоаппарате установлена матрица с высоким разрешением, испортить картину в прямом смысле этого слова может дешевая оптика.
Свойства объектива зачастую не соответствуют возможностям начинки, поэтому компактные цифровики не подходят для серьезной съемки.
Почти 90 процентов любительских цифровиков имеют матрицы, на которых расположены от 5 до 12 млн. пикселей. У зеркалок разрешение от 8 до 21 млн. пикселей, зато размеры сенсоров куда больше.
Depositphotos
Значения интенсивности пикселя различаются по геометрической и цветовой точности, динамическому диапазону, наличию шумов. На эти характеристики влияет число фотодетекторов, использованных для его определения, качество линзы, комбинации сенсоров, размеры фотодиодов, предустановленные программы обработки изображений, формат, в котором сохраняется изображение и т. д.
Впрочем, если вы не собираетесь устраивать фотовыставку и заниматься фотохудожеством вплотную, вполне можно найти адекватную модель для конкретных задач.
А для оперативной съемки, размещения фото и отправки через интернет вполне можно выбрать фотоаппарат оптимальных возможностей — компактный цифровик среднего уровня. Специалисты рекомендуют обращать внимание на 5−8-мегапиксельные модели, т. е.
выбирать для творческих работ непрофессиональных фотографов золотую середину — такого разрешения вполне достаточно, чтобы получить четкую и красочную картинку.
Depositphotos
Источник: https://ShkolaZhizni.ru/computers/articles/25539/
Матрицы и пиксели
Что такое матрица? Зачем она нужна?
Попробуем разобраться …
Свет, проходя через линзы объектива, попадает именно на матрицу. Именно матрица есть тот элемент, который преобразует входящий световой поток в набор электронных импульсов, которые затем, после обработки процессором, записываются в виде цифрового кода на карту памяти.
Таким образом, матрица как бы преобразует свет в электронный сигнал . Матрица состоит из мельчайших элементов — пикселей. Пиксель — мельчайшая часть изображения, точка. Чем больше таких точек, тем чётче картина (выше разрешение). Есть информация, что разрешение нашего глаза составляет около 250 млн. пикселей …
Чем большее количество пикселей имеет матрица, тем по идее, чётче картинка. Однако, здесь есть нюанс. Самый «крутой» телевизор или монитор показывает картинку с разрешением не более 2 млн. пикселей (2 мегапикселей).
Для распечатки фотографий формата 10х15 требуется не более 3 мегапикселей .
Возникает вопрос — зачем в фотоаппаратах устанавливают матрицы с разрешением 14, 16 мегапикселей? Да ещё и увеличивают этот показатель каждый год ? Маркетинговый ход? Стимулирование спроса? Да, конечно, есть и такое…
Здесь имеет место даже такая ситуация, когда увеличение количества пикселей без увеличения размера матрицы вредно для качества фотографии …
За счёт чего пикселей в одной матрице больше, чем в другой, если матрицы одинакового размера ?
Конечно, за счёт размера самого пикселя. Пикселей больше, но они мельче. А чем меньше размер пикселя, тем хуже его светопередача, следовательно, фотоаппарат будет хуже обрабатывать кадры в условиях слабого освещения.
- Поэтому — совет. Если выбираете камеру с большим количеством пикселей, обращайте также внимание и на размер матрицы
- Большое количество пикселей проявит себя, когда Вы будете увеличивать фотографию на мониторе компьютера, тогда мелкие детали будут выглядеть чётче за счёт имеющегося запаса пикселей.
Большой квадрат — это размер кадра в плёночном фотоаппарате (вот почему хороший «плёночник» лучше обычной «мыльницы»). В обычных компактных камерах матрица имеет размер 1/3,2″ или 1/2,7″ (размер ногтя человека).
В зеркальных фотоаппаратах матрица обычно имеет размер не менее 22х15 мм. Из компактных фотоаппаратов с большой матрицей можем отметить следующие модели
Выбираете фотоаппарат с большой матрицей? Интересуетесь техникой?
Приглашаем Вас оставить свой отзыв о надёжных моделях
Источник: https://techno-vubor.ru/Term-matr.html
Количество пикселей фотоаппарата
Матрица цифрового фотоаппарата состоит из пикселей (pixels), которые представляют собой полупроводниковый фотоэлемент, способный реагировать на освещенность. Направляя на фотоэлементы поток света с объектива, мы на выходе получаем электрический сигнал. Электроника фотокамеры записывает этот сигнал в память в виде снимка в графическом формате.
Посмотрим, на что влияет количество мегапикселей на матрице. Реклама говорит, что чем выше количество пикселей, тем большая детализация изображения и тем лучше фотография. Теоретически это правильно, но до какого-то предела. Большое разрешение фотокамеры нужно, например, если печатать плакат больших размеров.
Но если печатать фотографию 15х10 см и выставить на принтере разрешение 300 dpi (это хорошее качество, применяемое в полиграфии), то может хватить и снимка с разрешением в 2 Мп. А что бы напечатать в таком же качестве фотографию формата А4, то необходимо разрешение 7-10 Мп.
Поэтому необходимо подумать, а стоит ли переплачивать за разрешение больше 10 Мп.
Цена не должна напрямую зависеть от количества пикселей. Ведь мы уже сказали, что увеличивать количество мегапикселей можно до определенного предела, так вот предел этот определяется качеством фотографии.
Структура матрицы фотокамеры
Так же высокое разрешение снимка может пригодится при редактировании. Вырезая в графическом редакторе часть снимка и увеличивая его, мы получаем достаточное разрешение этого участка если общее разрешение фотоснимка было высоким.
На качество фотографии помимо разрешения матрицы влияет еще и размер каждого пикселя, а об этом в рекламе молчат. При увеличении количества пикселей уменьшается их размер и, соответственно, уменьшается объем собираемого фотоэлементом света.
А это приводит к плохой цветопередаче, увеличению шумов, уменьшению светочувствительности.
И подумайте, как меняется размер пикселя, если при таком же размере матрицы увеличить их количество? Это в зеркальных фотоаппаратах большие матрицы и там количество мегапикселей может быть больше 10 Мп без ущерба для качества фотографии.
Структура пикселя
Выбирая фотоаппарат, Вы должны знать, на что влияет показатель количества пикселей и не гнаться бездумно за их числом.
Современные фотоаппараты в основном имеют матрицы с разрешением 12-22 Мп, а мы сказали, что для печати нормальных фотографий 15х10 см хватит и 2 Мп, значит для нормальной съемки дома хватит разрешения любого современного фотоаппарата и стоит при выборе обратить внимание на размер самой матрицы.
Но если Вам действительно нужна детализация, то тогда вы осознано выберете фотоаппарат с большим количеством мегапикселей. Главное знать, что вы себе выбираете и брать то, что Вам нужно действительно для съемки и не попадаться на уловки маркетологов.
Источник: https://vybrat-tekhniku.ru/ustroystvo/megapicsel.html
Сколько нужно мегапикселей в фотоаппарате?
Для новичков и простых любителей фотографии выбор фотоаппарата является весьма нелегким делом, ведь производители предлагают сегодня огромное разнообразие моделей, отличающихся как субъективными параметрами, так и техническими характеристиками. Причем компании-производители в рекламных предложениях, главным образом, напирают на количество мегапикселей в своих камерах.
В результате, рядовые покупатели вынуждены обращать свое внимание на то, сколько мегапикселей в данном фотоаппарате — 7, 8, 10, 12 и так далее. У них складывается впечатление, что чем больше мегапикселей, тем лучше камера. Но так ли это на самом деле? Является ли количество мегапикселей такой уж важной характеристикой фотоаппарата? Попробуем ответить на эти вопросы.
Сколько нужно мегапикселей?
Как известно, пиксели – это точки, которые сохраняют в светочувствительной матрице фотоаппарата информацию в цифровой форме об отдельной части кадра. Поскольку в матрице любой цифровой фотокамеры таких пикселей очень много, то счет идет уже на мегапиксели (мега – миллион). Итак, существует расхожее мнение, что от количества мегапикселей зависит качество получаемого фотоизображения.
В действительности же, количество мегапикселей влияет на максимальный размер фотографии, которую Вы сможете распечатать без потери качества. Любое цифровое устройство, будь то экран персонального компьютера или ноутбук, выводит отснятое фотоизображение в фиксированных размерах.
Поэтому, чтобы качество выводимого на экран изображения было максимально высоким, необходимо его полное соответствие размерам снимка, отснятого фотокамерой.
В противном случае Ваш принтер или персональный компьютер начнет подгонять размеры снимка под фиксированные размеры, что, в конечном счете, оборачивается определенной потерей качества.
Сколько же Вам необходимо мегапикселей в фотокамере для того, чтобы, например, без потери качества рассматривать отснятые снимки на экране монитора или распечатывать изображения? Оказывается, что не так уж и много. В частности, при печати стандартной фотографии размером 10х15 Вам понадобится разрешение 1180х1770 пикселей, что соответствует всего двум мегапикселям!
Конечно, лучше иметь разрешение матрицы чуть побольше, на всякий случай, чтобы, например, укрупнить или поменять экспозицию. Таким образом, для печати обычных фотографий для домашнего фотоальбома Вам достаточно будет фотокамеры с матрицей в 3 – 4 мегапикселя. Правда, сейчас таких фотоаппаратов уже нет в продаже.
Для чего же в таком случае производители фототехники делают акцент на количестве мегапикселей и постоянно выпускают все новые модели фотоаппаратов с большим разрешением матрицы? В первую очередь, это хороший маркетинговый ход. Ведь всегда приятно похвастаться перед своими друзьями или знакомыми, что у Вас 12-мегапиксельная камера, в то время как они являются обладателями «какого-то» фотоаппарата с матрицей в 7,1 мегапикселя.
Но все же есть и практическая польза от большого количества мегапикселей. Правда, она проявляется только тогда, когда Вы собираетесь распечатывать фотографии в большом формате – большие плакаты или постеры.
Если Вы занимаетесь профессиональной студийной фотографией и часто распечатываете большие фотографии, то здесь можно остановиться на фотокамере с матрицей в 10 – 12 мегапикселей.
Итак, чем больше мегапикселей в фотоаппарате, тем меньше ограничений на размер качественного снимка. На качество же фотографий влияют совершенно другие параметры.
Физический размер матрицы фотоаппарата.
На качество получаемых изображений оказывает влияние совершенно другая характеристика, нежели количество мегапикселей в матрице фотокамеры. Это, в первую очередь, физический размер матрицы фотоаппарата. Под физическим размером матрицы понимают геометрические размеры сенсора, то есть его длину и ширину в миллиметрах.
Правда, в описании технических характеристик фотокамеры физический размер матрицы указывается чаще всего в виде дробных частей дюйма, например, 1/2.3″ или 1/3.2″. Чем больше размер матрицы, тем число после дроби меньше. Величина 1/2.5″ соответствует геометрическим размерам сенсора — 4.3х5.8 мм.
На что влияют физические размеры матрицы фотоаппарата? Этот параметр определяет уровень цифрового «шума» и детализацию фотоизображения. Чем больше размеры светочувствительного сенсора, тем больше его площадь и, соответственно, тем больше света на него попадает. Это позволяет Вам получить качественное изображение с большим количеством деталей и естественными цветами.
Поскольку физические размеры матрицы в компактных фотоаппаратах меньше, чем в более профессиональных моделях камер, то они и проигрывают по качеству получаемых снимков.
Поэтому если Вы выбираете оптимальный вариант камеры из нескольких моделей при одинаковом количестве мегапикселей, то лучше остановиться на том цифровом фотоаппарате, у которого больший физический размер матрицы.
Это даст Вам большую свободу при выборе места съемки и снизит уровень «шумов» в условиях недостаточной освещенности.
Не стоит никогда акцентировать свое внимание на количестве мегапикселей в фотокамере. Производители фототехники используют эту характеристику, в первую очередь, как рекламный прием для продвижения своих новых моделей на рынок.
Большинство пользователей, кто просто собирается хранить свои снимки в электронном формате и время от времени показывать их знакомым в домашнем фотоальбоме, вполне могут ограничиться покупкой фотокамеры с минимальным количеством мегапикселей, ведь разницу между 7- ми и 12-мегапиксельной камерой они все равно не почувствуют.
С точки зрения качества получаемых фотоизображений, гораздо более важен другой параметр – физический размер матрицы фотоаппарата. На эту характеристику, а также качество оптики и функциональность, и надо ориентироваться при выборе подходящей Вам фотокамеры.
Источник: Фотокомок.ру – учимся фотографировать (при копировании или цитировании активная ссылка на источник обязательна)
Источник: http://www.fotokomok.ru/skolko-nuzhno-megapikselej-v-fotoapparate/
Сколько нужно мегапикселей?
© 2015 Vasili-photo.com
Разрешение матрицы цифрового фотоаппарата принято измерять в мегапикселях. Быть может, это и не совсем корректно (поскольку число фотодиодов является далеко не единственным фактором, влияющим на разрешение), но на бытовом уровне вполне допустимо.
Беда в том, что количество мегапикселей часто воспринимается как некий интегральный показатель, позволяющий, как многим кажется, не только исчерпывающе охарактеризовать производительность фотокамеры, но и измерить качество (а то и художественную ценность) получаемых с её помощью снимков.
У данного заблуждения две основные причины. Первая – психологическая: человеку, сравнивающему различные камеры, хочется иметь простой, понятный, легко измеряемый параметр, который бы однозначно указывал на превосходство одного аппарата над другим. Мегапиксели подходят на эту роль как нельзя лучше.
Вторая причина – историческая: разрешение первых цифровых фотоаппаратов было объективно низким (не более пары мегапикселей), в связи с чем, количеству пикселей заслуженно придавалось большое значение, и любой прогресс в этой области всячески приветствовался.
Сегодня, когда счёт мегапикселей в большинстве фотокамер идёт уже на десятки, разрешение больше не является проблемой, и о нём не следовало бы беспокоиться, но инерция мегапиксельной гонки столь сильна, что отказываться от привычки сравнивать камеры в первую очередь на основании числа мегапикселей не торопятся ни потребители, ни производители фототехники.
Так сколько же мегапикселей должно быть в современном фотоаппарате? Может ли мегапикселей быть слишком много? Действует ли в отношении мегапикселей правило «чем больше – тем лучше», или всё-таки по достижению определённого рубежа дальнейшее наращивание разрешения теряет всякий смысл? Попробуем разобраться.
Мегапиксели и разрешение
Один мегапиксель (Мп) представляет собой один миллион пикселей, т.е. точек из которых формируется цифровое изображение. Например, если линейное разрешение матрицы составляет 4000 пикселей по горизонтали и 3000 по вертикали, то общее количество пикселей будет равно 4000 × 3000 = 12 000 000 или 12 Мп. Впрочем, всё это вы, скорее всего, и без меня знаете.
Мне просто хотелось напомнить, что в мегапикселях измеряется не разрешение, как таковое, и тем более не качество изображения, а именно количество пикселей.
Можно сказать, что мегапиксели определяют потенциальную способность фотокамеры воспроизводить мелкие детали, при том условии, что камера оснащена объективом соответствующего качества и фотографом, знающим своё дело.
Иными словами, не всякий объектив обладает достаточной резкостью, чтобы переход от шестнадцати к двадцати четырём и уж тем более от двадцати четырёх к тридцати шести мегапикселям хоть как-то сказался на детализации снимка, и далеко не всякий фотограф способен выжать из своего оборудования тот потенциальный максимум резкости, на который оно рассчитано.
Замена старой камеры на новую, отличающуюся большим количеством мегапикселей, оправдана лишь в том случае, если ваши теперешние снимки отличаются безупречной резкостью.
В данной ситуации прирост разрешения и вправду может привести к повышению детализации. Если же с резкостью у вас проблемы, то наивно полагать, будто покупка новой камеры эти проблемы решит.
Дополнительные мегапиксели только усугубят изъяны оптики и недостаток дисциплины.
Примечательно, что даже незначительный прирост линейного разрешения сопровождается основательным увеличением числа мегапикселей. Это напоминает вычисление площади.
Чтобы удвоить количество мегапикселей достаточно увеличить линейное разрешение на 41%, а удвоение линейного разрешения приводит к увеличению числа мегапикселей вчетверо.
Именно за это своё коварное свойство мегапиксели столь нежно любимы маркетологами, поскольку оно позволяет представить весьма умеренный прогресс, как нечто революционное.
На самом деле, двукратный прирост числа мегапикселей – вовсе не революция, это всего лишь тот минимум, после которого повышение детализации становится заметным для большинства людей, и то лишь при условии, что детализация была ограничена исключительно количеством пикселей, а вовсе не аберрациями объектива, промахами фокусировки, вибрацией камеры и неумелым редактированием. Причём вклад именно разрешения матрицы в общую резкость снимка стремительно снижается по мере роста числа мегапикселей. До 10 Мп этот вклад весьма значителен, от 10 до 20 Мп уже не столь весом, а при разрешении свыше 20 Мп на первый план безоговорочно выходят качество оптики и мастерство фотографа.
Вреден ли избыток мегапикселей?
В целом – нет, не вреден. Я просто считаю нужным подчеркнуть, что и пользы от него не много. На мой взгляд, единственным действительно негативным эффектом, связанным с ростом разрешения, является пропорциональное увеличение объёма файлов, стремительно заполняющих карты памяти, пожирающих дисковое пространство и тормозящих работу компьютера при постобработке.
Мне могут возразить, что фотоаппараты с большим разрешением ещё и больше шумят при высоких значениях ISO. Это справедливо, но лишь при попиксельном сравнении снимков, т.е. при 100% увеличении. При равном масштабе уровень шума будет примерно одинаковым (при прочих равных условиях, разумеется).
Например, если снимок, сделанный 36-мегапиксельной камерой уменьшить в Фотошопе до 16 мегапикселей, то по уровню шума он практически не будет отличаться от аналогичного снимка, изначально сделанного 16-мегапиксельной камерой.
При этом уменьшенный снимок может выглядеть даже несколько более чётким, поскольку уменьшение изображения (децимация) в определённой степени нейтрализует потерю резкости, неизбежную при байеровской интерполяции.
Таким образом, высокое разрешение действительно позволяет матрице фотоаппарата собрать больше информации о снимаемой сцене и потенциально обеспечить лучшую детализацию снимка. Другой вопрос, сможете ли вы воспользоваться этим потенциалом, или же он воплотится только в лишние гигабайты, занимающие ваш жёсткий диск?
***
Чтобы понять, какое число мегапикселей будет для вас необходимым и достаточным, следует просто вспомнить, какое конечное применение вы находите для ваших снимков? Рассматриваете ли вы их на мониторе компьютера или, быть может, при помощи цифрового проектора? печатаете ли вы свои снимки, а если да, то каков максимальный размер отпечатков? делитесь ли вы своими снимками в Интернете? подвергаете ли вы снимки какой-либо обработке, или довольствуетесь тем, что получается на выходе из камеры?
Просмотр фотографий на компьютерном мониторе
Самым распространённым среди посетителей моего сайта разрешением экрана является 1920×1080 (Full HD), что примерно соответствует двум мегапикселям.
Для ноутбуков самое популярное разрешение – 1366×768 (WXGA), т.е. один мегапиксель. Редкие посетители пользуются мониторами с разрешением 2560×1440 (WQXGA), а это меньше четырёх мегапикселей.
Компьютеров iMac с дисплеями типа Retina настолько мало, что ими можно пренебречь.
Вывод, как мне кажется, очевиден: для просмотра фотографий на мониторе персонального компьютера в большинстве случаев достаточно 2-4 Мп. И это если снимок развёрнут на весь экран, а не ютится в маленьком окошке.
Проекторы
Массовые модели современных цифровых проекторов имеют разрешение 1920×1080 (Full HD) или даже меньше, а значит пытаться продемонстрировать публике что-то превышающее пару мегапикселей с их помощью бессмысленно. Проекторы с разрешением 4096×2160 (4K) большинству фотографов просто не по карману, но даже неполные девять мегапикселей – это по современным меркам не столь уж много.
Печать фотографий
Разрешение отпечатка вне зависимости от его размера принято измерять в точках на дюйм (dpi). Например, при печати с разрешением 300 dpi на каждый линейный дюйм (2,54 см) будет приходиться по 300 точек, что соответствует 118 точкам на один линейный сантиметр.
Разрешение меньше 150 dpi считается низким, от 150 до 300 dpi – приемлемым и от 300 dpi и больше – высоким. Высокое разрешение означает, что отдельные точки, составляющие изображение, практически неразличимы для невооружённого глаза. Обычно отпечатки умеренного размера (до A3 включительно) делают с разрешением именно 300 dpi. Для больших отпечатков допустимо использовать меньшее разрешение.
Многое зависит от расстояния, с которого вы собираетесь рассматривать снимок. Маленькие карточки разглядывают вблизи, и их разрешение должно быть по возможности высоким.
Большие полотна вешают на стену и любуются ими стоя на некотором отдалении, а потому даже сравнительно невысокое разрешение не будет резать глаз. Это относится и к фотообоям.
Огромные билборды, на которые люди смотрят с расстояния в десятки метров, можно печатать с разрешением 32 dpi, и они всё равно будут смотреться неплохо.
Из приведённой ниже таблицы видно, сколько мегапикселей требуется для съёмки и последующей печати фотографий с разрешением как 150, так и 300 dpi при различных размерах отпечатка.
| Размер отпечатка, см | Число мегапикселейпри 150 dpi | Число мегапикселейпри 300 dpi |
| 9×13 | 0,4 | 1,6 |
| 10×15 (A6) | 0,5 | 2,1 |
| 13×18 | 0,8 | 3,3 |
| 15×21 (A5) | 1,1 | 4,4 |
| 21×30 (A4) | 2,2 | 8,8 |
| 30×42 (A3) | 4,4 | 17,6 |
Когда вы последний раз печатали свои снимки на формате A3? Напомню, что самым популярным среди фотолюбителей размером отпечатка является A6, т.е. 10×15 см.
Интернет
Интернет не любит больших фотографий. Во-первых, большие фотографии долго загружаются, а во-вторых, большинству людей просто неинтересно рассматривать микроскопические подробности чужих снимков.
Исключение составляют разве что специализированные фотографические форумы.
Что же касается социальных сетей, то ваши многомегапиксельные снимки в любом случае будут уменьшены при загрузке на сервер вне зависимости от вашего на то согласия, причём качество децимации будет далеко не самым высоким.
Если вы пересылаете фотографии родственникам и знакомым по электронной почте, то уменьшать их необходимо хотя бы из соображений элементарной порядочности. Кому охота ждать, пока загрузятся громадные файлы с цветочками и котятами?
Словом, и здесь вам будет достаточно буквально пары мегапикселей.
Разумеется, всё это относится исключительно к любительской фотосъёмке и не касается снимков, предназначенных для коммерческого использования. Здесь всё зависит от конкретной ситуации. Если заказчик во что бы то ни стало требует 20 мегапикселей – что ж? – пошлём ему именно 20 мегапикселей, а нужны ли они ему на самом деле – это уже не наша забота.
Обработка снимков
При редактировании фотографий в Adobe Photoshop или ином графическом редакторе некоторый избыток разрешения не только терпим, но и весьма желателен. Во-первых, многие симки нуждаются в кадрировании, т.е. в обрезке краёв, и хорошо, когда у вас есть возможность не экономить пиксели.
Во-вторых, грамотное уменьшение изображения – лучший способ скрыть или, по крайней мере, минимизировать такие дефекты изображения как шум, хроматические аберрации, умеренная шевелёнка, артефакты интерполяции и т.д.
Иначе говоря, фотография, снятая с высоким разрешением, а затем уменьшенная, практически всегда выглядит лучше, чем изначально снятая с низким разрешением.
Впрочем, следует заметить, что разрешение современных фотоаппаратов столь велико, что запас мегапикселей, которыми можно пожертвовать при редактировании, имеется почти всегда.
Заключение
Мы с вами слишком долго говорили о том, о чём вообще не стоило бы говорить. Подведём же, наконец, итоги.
Чтобы удовлетворить потребности подавляющего большинства фотолюбителей хватит десятка мегапикселей, хотя и такое количество кажется несколько избыточным.
Редкий энтузиаст сможет в полной мере реализовать потенциал двадцати мегапикселей, но такие люди обычно знают, чего хотят.
Те же фотографы, которым объективно может потребоваться большее разрешение, и которые умеют с ним обращаться, вряд ли стали бы читать эту статью.
Учитывая тот факт, что разрешение более-менее серьёзных фотокамер составляет сегодня в среднем около двух десятков мегапикселей и продолжает расти, считаю дальнейшие дискуссии на эту тему просто излишними. Число мегапикселей больше не является тем параметром, на который стоит всерьёз обращать внимание при выборе камеры.
Спасибо за внимание!
Василий А.
Post scriptum
Если статья оказалась для вас полезной и познавательной, вы можете любезно поддержать проект, внеся вклад в его развитие. Если же статья вам не понравилась, но у вас есть мысли о том, как сделать её лучше, ваша критика будет принята с не меньшей благодарностью.
Не забывайте о том, что данная статья является объектом авторского права. Перепечатка и цитирование допустимы при наличии действующей ссылки на первоисточник, причём используемый текст не должен ни коим образом искажаться или модифицироваться.
- Желаю удачи!
- Вернуться к разделу «Фотооборудование»
- Перейти к полному списку статей
Источник: https://vasili-photo.com/articles/megapixels.html
Насколько важно количество мегапикселей в камере?
Бытует распространенное заблуждение, что количество мегапикселей непосредственно влияет на качество фотографии. На деле, оно порождено талантливыми маркетологами, знающими, что люди очень любят различные циферки.
Кроме того, измеримые показатели кажутся более объективными, и поэтому человек ощущает, что он сам делает выбор. Именно поэтому многие камеры с меньшим разрешением матрицы делают более качественные снимки.
И сегодня мы объясним, почему это так.
На что действительно влияют мегапиксели?
Мегапиксели в камере влияют на детализацию изображения, распечатанного на листе определенного размера. Чем разрешение матрицы выше, тем лучше картинка будет смотреться на бумаге большого размера. Так что на качество изображения влияют также особенности сенсора и апертура.
Сама матрица состоит из множества ячеек (пикселей), количество которых и определяет ее разрешение. Но проблема тут в том, что при том же количестве пикселей их размер может отличаться.
Если они будут слишком маленькими, то смогут взять лишь небольшое количество света. Как следствие, оставшиеся лучи переходят на соседние пиксели, и образуется всем известный цветовой шум.
Именно поэтому при крошечном размере матрицы большое количество мегапикселей может даже вредить качеству.
Huawei на втором месте среди производителей смартфонов
В последнее время стал популярным еще один показатель, указывающий на потенциальную способность камеры делать хорошие снимки. Если говорить по-простому, то апертура являет собой своеобразный «зрачок» камеры.
Точно так же, как наш зрачок расширяется или сужается для того, чтобы получить больше или меньше света, так же и апертура может быть определенного размера.
Следовательно, от ее величины зависит способность камеры улавливать свет.
Апертура измеряется в f-числах (стопах, как говорят профессионалы). Сами же цифры дробные (например 1.8). Чем меньше этот показатель, тем больше расширяется «зрачок» камеры.
Это напрямую влияет на качество снимка. Если света много, то большая апертура способна только испортить кадр. Понять, что будет в результате, очень просто. Попробуйте повернуться спиной к солнцу и сфотографироваться.
Вот приблизительно такой снимок можно получить при слишком большой апертуре. Если же этот показатель слишком большой (то есть, размер зрачка маленький), то снимок получится слишком темным.
Поэтому данное значение должно подстраиваться под ситуацию.
Vivo Nex S против Samsung Galaxy S9+ и Huawei P20 Pro
Самое главное — это навыки. Если вы хороший фотограф, то даже с плохой камерой сможете создать шедевр. А вот неумелый новичок сделает ужасный кадр даже на дорогой зеркалке. Вот несколько простых рекомендаций, как выжать максимум из вашей простой камеры:
- Не забывайте о необходимости подготовки к съемке. Обязательно протрите объектив, покопайтесь в настройках телефона, поиграйтесь со значениями экспозиции, ISO, балансом белого и другими параметрами. При этом рекомендуется не применять слишком много дополнительных функций к фотографии (типа рамок, фильтров), потому что в случае ошибки переделать результат уже не получится. Если хочется добавить интересный эффект к снимку, лучше сделать это на этапе коррекции.
- Избегайте съемки при плохом освещении. Пока что ни один телефон, даже самый дорогой, не научился делать прекрасные снимки в ночное время. Можно, конечно, выставить большой уровень ISO, но в таком случае шума на фото будет тоже очень много.
- Лучше более затемненный снимок, чем слишком светлый. Если на фото много теней, коррекция способна на чудеса. А вот восстанавливать детали на месте белых пятен очень тяжело.
- Если у камеры плохой автофокус, избегайте фотографирования близких объектов. Попробуйте эту функцию перед тем, как ее использовать на практике. Если макросъемка не получается, то пытаться бесполезно.
Huawei P20 PRO — смартфон с самой лучшей камерой
Итоги: что влияет на качество фото?
Нельзя сказать, что количество мегапикселей не оказывает положительного влияния на качество снимка. Но если максимум, который вам нужен — смотреть фотографии на телефоне и выкладывать их в Instagram, то этот параметр почти ни на что не влияет.
Значительно важнее другие вещи, а именно:
- Апертура.
- Настройки камеры. Далеко не каждый смартфон будет хорошо фотографировать из коробки при том, что камера довольно неплохая. На этот момент влияет программная часть. Если плохо прописаны алгоритмы автонастройки, то придется все делать вручную. Нужно подружиться с такими понятиями, как ISO, выдержка (экспозиция), фокус.
- Навыки фотографирования и обработки снимков. Хороший специалист даже на плохую камеру сделает классный снимок. В крайнем случае — можно откорректировать изображение. Современные приложения способны делать это на высшем уровне, значительно улучшая его качество.
В общем, все эти факторы нужно учесть для того, чтобы создавать шедевры.
Источник: https://phonepress.ru/naskolko-vazhno-kolichestvo-megapikselej-v-kamere
Выбор цифрового фотоаппарата — на что надо смотреть
.
Постоянно выходят новые модели цифровых фотоаппаратов, напичканные новыми функциями и программами съемки, количество мегапикселей постоянно растет — возможность выбора просто пугает. Цель — доступно изложить что имеет значение для фотоаппарата, а что нет. Если Вы дочитали до этого места, значит уже понимаете, что фотографировать мобильником — равноценно им же гвозди забивать, любой фотоаппарат снимет лучше.
Если вы сомневаетесь, как и мой 14 летний сын с новым Sony Erisson K510i c крутой камерой 1,3Mp — на стареньком Canon A400 было выставлено 0,78Mp — меньше уже ну ни как. Результат можно посмотреть здесь. Вопрос закрыт.
Цифровые, пленочные, зеркальные, дальномерные — все они разные. Ни у одной нет 100% преимущества, у всех свои особенности. Изначально надо определиться — для чего фотоаппарат?
1. Просто фотографировать пьянки-гулянки (бытовуху) не вникая в подробности, печатать снимки в альбом 10х15 — подойдет практически любой. Тут главный критерий — цвет корпуса и как фотег лежит в руке и кармане.
2. Имея представление о композиции, есть желание подправить снимок в Фотошопе (Adobe Photoshop CS) перед печатью, но нет желания тупо слушать басни продавца и переплачивать, хочется самому все понять — надо читать и выбирать.
Прежде всего практически все фотоаппараты можно разделить на две группы: зеркальные и незеркальные. (Дальномерный и пр. ввиду немногочисленности опустим).
В зеркальной камере вы смотрите на объект съемки через объектив камеры. Часть света отражается в корпусе камеры от наклонно стоящего зеркала и попадает в видоискатель (таким образом Вы видите так, как «видит» камера).
Оптика (объектив), сменные — это дает возможность приспособить камеру для любого вида съемок. Зеркальная камера предоставляет больше возможностей для творческого подхода, но все приблуды стоят кучи компактов.
Плохо при хорошем освещении не будет снимать не один аппарат, несколько иначе — да. Все это относится к брендовым маркам: Nicon, Pentax, Canon, Olimpus, Sony и некоторым другим, которые на слуху. Продавцы в магазинах напирают на количество мегапикселей как на основной критерий выбора. Да, красиво смотрится надпись 118Mpix на минюатюрной мыльнице, но существует другой, более важный параметр — физический размер матрицы.
Физический размер матрицы — (длина х ширина в мм), который принято выражать в дюймах 1/3,2″, 1/2,7″ …… и т.д. Теперь понятно, почему лепят на корпус 18000000 Pix, а не убогое 1/2,7″.
Меньше размер матрицы — мельче пиксели — меньше они получют света, больше проблемы для получения качественного изображения при недостатке освещения, но меньше матрица — меньше ее цена, меньше объектив и фотоаппарат получается более миниатюрным и более дешевым. Не все однозначно, что лучше — решать самим.
Количество мегапикселей — cколько их надо для счастья?
Куплю фотег подешевле, но с самым большим количеством мегапикселей — и мои снимки будут самыми резкими! Так ли это?
В таблице приведены параметры файлов для печати в фотолаборатории с оптическим разрешением 300dpi. Если вы принесете файл 8Мп, а пожелаете печатать фотографии размера 10х15, то такой файл будет считаться неподготовленным, и ваши мегапиксели лаборатория перед печатью уменьшит до необходимых в данном случае 2,2Мп. Т. е., в данном случае предпочтительнее при покупке чтобы не переплачивать, выбрать аппарат с меньшим количеством пикселей при одинаковом физическом размере матрицы.
| Размер фото в см | Размер отпечатка в пикселях | Мегапиксели |
|---|---|---|
| 9 x 13 | 1051 x 1500 | 1,6 |
| 10 x 15 | 1205 x 1795 | 2,2 |
| 20 x 30 | 2398 x 3602 | 8,6 |
| 30 x 40 | 3602 x 4760 | 17,0 |
| Экран ноутбука | 1366 x 768 | 1,05 |
| Монитор (max) | 1920 x 1200 | 2,3 |
В случае: я не печатаю фотографии, а смотрю на большом 25 дюймовом мониторе (еще большем телевизоре, проекторе и пр.)!
Стандарное разрешение (максимум на сегодняшний день для бытового использования) 1920x1200px, что в пересчете на мегапиксели составит 2,3Mp.
Стандартное разрешение телевизоров и проекторов HD 1920x1080px, что в пересчете составит 2,07Mp.
Сейчас упорно продвигается техника с новым разрешением UHD 2K, 4K, 8K.Чуствительность ISO — мифы и реальность
ISO можно сравнить с чувствительностью пленки, только в отличие от пленки его значение можно оперативно менять в процессе съемки. Т.е. при съемки в более затемненных условиях потребуется установка более высокого значения ISO.
Необходимо представлять, что с увеличением значения ISO растут шумы на изображении, т.е. при возможности необходимо при съемке использовать минимальное значение ISO.
Набор допустимых установок как правило 50-800, на зеркальных камерах есть 1600 и 3200.
Но не все так замечательно, как написано в рекламе фотоаппарата.
Рассмотрим самую маленькую матрицу — пиксели у нее минимального размера, света они получают очень мало, всвязи с чем, при установке максимального значения ISO получается большой уровень шума — камера просто не получает необходимого сигнала с матрицы.
Снимки с ISO 200 с матрицей 1/1.8″ будут аналогичны снимкам с ISO 50 матрицы 1/3.2″.Т.е больший размер матрицы позволяет реально использовать при необходи-мости более высокие значения ISO.
Покупая аппарат с маленькой матрицей, надо иметь в виду, что снимая на ISO более 200, фотографии могут иметь артефакты в виде цветного шума. Надеяться на шумоподавитель камеры не стоит — удаляя шум он обычно смазывает мелкие детали — замыливая картинку.
Для цифрозеркалки, с ее значительно большей матрицей изображение с ISO 400 не отличается от ISO 100.
Для образца выкладываю образцы съемки — видеокамера Panasonic 400GS (гордая надпись 4,0Mp), ф/а Canon A400 (3,2Mp матрица 4,5х3,4мм) и цифрозеркалка Canon 350D (размер матрицы 15х22мм).
Снимал с рук в помещении, но тенденция видна и можно констатировать, что видеокамера изображение дает хуже в разы, для компакта ISO 400 уже убийственно, цифрозеркалка благодаря значительно большему размеру матрицы на ISO 1600 дает изображение лучше по всем параметрам, чем компакт на ISO 400. Тенденция однако…..
Подтверждением того, что чудес пока не бывает, может служить небольшой тест 2х камер примерно одного ценового диапазона — продвинутого компакта Canon PowerShot G7 (10Mpix., матрица 1/1.8″) и зеркалки Canon EOS 350D (8.20Mpix., матрица 22,2 х 14,8мм).
|
Canon PowerShot G7 |
Canon EOS 350D |
Матрица с меньшим количеством мегапикселей, но по площади большей примерно в 6 раз. Съемка производилась в помещении при освещенности ниже средней в jpeg.
Съемка проводилась с рук, для ISO 400 уже был необходим был штатив, поэтому на изображении смаз, но на общий шум матрицы он не влияет. Вывод такой — на ISO 400 на компакте можно получать снимки, только существенно жертвуя качеством картинки, цифрозеркалка же на ISO 400 спокойно может снимать с нормальным качеством.
Отсюда и все эти прибамбасы на компактах — разнообразные стабилизаторы. Компакт ввиду маленького размера матрицы просто физически не может перейти на более высокое ISO всвязи с повышением уровня шумов, и вынужден снимать с более длинной выдержкой используя стабилизатор. Зеркалке в аналогичных условиях он просто не нужен — достаточно просто поставить более высокое значение ISO, или открыв диафрагму.
Битые пиксели матрицы фотоаппарата
Выбирая дорогой фотоаппарат желательно проверить его матрицу на битые пиксели. Битые пиксели подразделяются на 2 типа: битые (dead pixels) и горячие (hot pixels). Битые пиксели видны на снимках всегда, при любых значениях ISO и выдержки, а горячие пиксели на коротких выдержках работают нормально, а вот на выдержках, длиннее 1/60 или 1/30, начинают становиться заметными и выпадать из общей картинки на снимке.Продавец будет убеждать, что наличие энного количества битых пикселей на матрице фотоаппарата допускается стандартом производства, что битых пикселей не будет заметно на фото, и много еще чего …. но, мы — платим деньги покупая новый фотоаппарат, и соответственно хотим иметь фотоаппарат без недостатков, в данном случае — битых пикселей. Поэтому самостоятельно проводим проверку фотоаппарата на наличие битых пикселей: отсоединяем объектив, ставим заглушку, выключаем шумоподавление, ISO 400, выдержка 10-15 сек. и делаем кадр.
Полученный файл открываем в Adobe Photoshop в 100% увеличении, т.е. когда 1 пиксель матрицы фотоаппарата будет соответствовать 1 пикселю монитора, и внимательно просматриваем.
Проверяя при покупке 2 профессиональных фотоаппарата Canon 5D Mark-2 которые сошли с конвейера друг за другом, т.к. порядковые номера у них отличались на 1, на матрице одного было выявлено 9 битых пикселей, а на следующем только 2.
Вот уменьшенные на 50% снимки битых пикселей с двух матриц Canon 5D Mark-2 (~10kb):
Canon 5D Mark-2 битых пикселей=9 и Canon 5D Mark-2 битых пикселей=2
+ таблица сенсоров (2021)
Давайте начнем с развенчания мифа о мегапикселях, в который многие до сих пор верят: большее количество мегапикселей НЕ означает более высокое качество изображения.
Даже самая последняя камера iPhone не может конкурировать с 12-мегапиксельной полнокадровой зеркальной камерой с точки зрения четкости и чистоты ваших тонов и цветов. Уже давно установлено, что размер сенсора играет важную роль в определении того, насколько детально ваше изображение, а устройства меньшего размера просто не могут вместить полнокадровый сенсор.Это тот случай, когда размер имеет значение.
Какую роль играет размер датчика изображения?
Миллионы светочувствительных точек на сенсоре камеры определяют, сколько света используется для создания одной фотографии. Следовательно, чем больше размер сенсора, тем больше света он использует для создания качественной фотографии.
Значит, мегапиксели не влияют на качество фото?
По этому поводу между многими фотографами идет ожесточенная борьба. Некоторые утверждают, что 16 мегапикселей достаточно для отличных фотографий, а другие говорят, что при таком размере не хватает деталей.
На мой взгляд, количество мегапикселей действительно влияет на качество изображения, НО только в сочетании с эффективной сенсорной технологией, качеством объектива и другими важными функциями камеры.
Дополнительное разрешение в виде большего количества мегапикселей может сыграть вам на руку, если вам нужны огромные фотографии (например, настенные росписи). В противном случае вы можете ограничиться 16 мегапикселями и вместо этого приобрести полнокадровый сенсор, чтобы получить конечное изображение высочайшего качества.
Что такое битовая глубина в фотографии и как она работает?
Для цифровой фотографии одним из важнейших параметров является глубина цвета.Это часто называют глубиной пикселя или разрешением в битах. Он характеризует количество бит информации в пикселе изображения. Другими словами, это количество оттенков, соответствующих каждому пикселю изображения.
Точность связи оценивается с использованием битовой шкалы. Системы с более высокой битовой глубиной позволяют более точно описывать информацию, собираемую каждым пикселем.
Число битов определяет все возможности цвета, которые один пиксель может представлять в фотографии, что известно как битовая глубина.Битовая глубина определяет, сколько шагов или возможных вариаций в пределах тонального диапазона может быть передано.
Однако все это ничего не значит, если у вас нет отличного сенсора камеры.
Преимущества больших сенсоров камеры
Как я уже говорил, большой размер сенсора позволяет камере делать качественные фотографии, но это не единственное их преимущество.
Большие датчики могут помочь вам добиться более малой глубины резкости; Другими словами, выделение объекта в фокусе и размытие фона.Чем меньше размер сенсора, тем труднее добиться этой изоляции… поэтому вам понадобится объектив с более широкой диафрагмой.
Кроме того, более крупные сенсоры способны производить меньше шума, поскольку вокруг пикселей больше «пространства для дыхания». С меньшими сенсорами многие пиксели упакованы в ограниченное пространство, что делает шум более заметным, особенно когда вы увеличиваете ISO и / или фотографируете глубокие тени.
У больших датчиков есть один существенный недостаток: они не компактны.Много места занимают не только сенсоры, но и размер объектива… который должен быть достаточно большим, чтобы закрывать сенсор. Конечно, легче пользоваться маленьким смартфоном… что является компромиссом для качества изображения, поскольку он всегда под рукой и не требует особых условий.
Это одна из многих причин, по которым профессиональные фотоаппараты намного дороже обычных телефонов.
* Размеры сенсора не указаны в точном масштабе, но являются приблизительными, чтобы продемонстрировать разницу.
В приведенном выше примере вы можете видеть, что чем меньше датчик, тем меньшую площадь он покрывает для одной фотографии (при условии, что используется такое же фокусное расстояние). Самый маленький сенсор, 1 / 2,5, используется большинством iPhone.
Для того, чтобы iPhone мог захватывать ту же область, что и полнокадровая камера, вам придется использовать гораздо более широкое фокусное расстояние. Это приведет к совершенно другой перспективе, поскольку более широкое фокусное расстояние значительно преувеличивает видимые расстояния между фокусными точками (насколько большими или маленькими кажутся элементы фона).
Другими словами, горы и деревья на заднем плане были бы намного меньше, полностью отбрасывая композицию, которую я создал.
Измерения различных датчиков
Производители нечасто раскрывают полную информацию о реальных размерах камеры с матрицей. Дробные числа, которые вы видите, чтобы детализировать размер датчика, произошли от электронных ламп, которые ранее использовались для телекамер. Однако определить размер не так просто, как измерить диагональ датчика.
Еще больше сбивает с толку то, что разные производители используют одно и то же название для разных размеров. Например, APS-C на камере Canon немного меньше, чем APS-C на Nikon, Pentax или Sony.
Я бы хотел, чтобы все производители камер указывали размер своих сенсоров в миллиметрах, но я не думаю, что в ближайшее время это произойдет. Итак, пока что вот пара графиков, показывающих некоторые из наиболее распространенных размеров сенсора по сравнению с полнокадровым.
Эта таблица не охватывает все размеры сенсоров, но это самые популярные.
Вывод здесь заключается в том, что размер сенсора может значительно расширить возможности вашей камеры при съемке с определенным фокусным расстоянием, а также дать вам более четкое изображение с большей детализацией и динамическим диапазоном.
Конечно, все больше и больше людей обращают внимание на размер сенсоров камеры, которые делают ваше изображение лучше. С развитием смартфонов и новой волной «фотографии смартфонов» меньшим сенсорам, очевидно, уделяется много внимания… и когда-нибудь у нас может быть лучшее из обоих миров: маленькие сенсоры и отличная производительность.
На данный момент увеличение размера сенсора остается одним из лучших способов улучшить качество ваших фотографий.
Хотите узнать больше о том, как по-настоящему понять свою камеру? Обязательно прочтите мои уроки по диафрагме, выдержке и ISO — трем наиболее важным шагам, которые вы можете сделать прямо сейчас, чтобы создавать лучшие фотографии.
Расчет разрешения сенсора камеры и фокусного расстояния объектива
Обычно объективы имеют фиксированное фокусное расстояние.Кроме того, обычно рабочее расстояние является гибким, поэтому для простых вычислений начните с отношения рабочего расстояния к фокусному расстоянию. Это позволит вам использовать определенные фокусные расстояния объектива для определения необходимого рабочего расстояния. Если рабочее расстояние ограничено, то, инвертируя это соотношение, мы получаем отношение фокусного расстояния к рабочему расстоянию. Это позволит вам использовать ряд вариантов рабочего расстояния, чтобы получить диапазон фокусных расстояний. Затем, когда линза выбрана, вы можете пересчитать точное необходимое рабочее расстояние.
Эти расчеты основаны на следующем уравнении:
Вычислить фокусное расстояние:
- Пример 4 (Использование гибкого рабочего расстояния): мой FOV составляет 508 мм x 381 мм, размер моего сенсора — 8,47 мм (диагональ). Отношение рабочего расстояния к фокусному расстоянию составляет 381 мм / 8,47 мм = 45: 1. Итак, если я выберу фокусное расстояние 25 мм (что составляет около 1 дюйма), тогда потребуется рабочее расстояние около 1140 мм (45 дюймов). Если максимальное доступное рабочее расстояние составляет 889 мм (35 дюймов), то инвертирование соотношения (1:45) дает максимальное фокусное расстояние 35/45 = 19.76 мм (7/9 «), поэтому подойдет фокусное расстояние 16 мм. Обратный расчет дает необходимое рабочее расстояние около 711,2 мм (28»).
- Пример 5 (Использование фиксированного рабочего расстояния): мое поле обзора составляет 609,6 мм x 609,6 мм, формат моего датчика — 12,7 мм (диагональ), а мое рабочее расстояние — 1016 мм. Чтобы точно определить фокусное расстояние, вам нужно знать соотношение сторон сенсора. Если точное значение не требуется, подойдет диагональ. Решение приведенного выше уравнения для фокусного расстояния будет (12.7X1016) / 609,6 = 21,2 мм. Это не обычное фокусное расстояние объектива, поэтому потребуется либо рабочее расстояние, либо нестандартный объектив, который позволяет пользователю изменять фокусное расстояние.
Объективы производятся с ограниченным числом стандартных фокусных расстояний. Стандартные фокусные расстояния линз включают 6 мм, 8 мм, 12,5 мм, 25 мм и 50 мм. После того, как вы выбрали объектив, фокусное расстояние которого наиболее близко к фокусному расстоянию, требуемому вашей системой визуализации, вам необходимо отрегулировать рабочее расстояние, чтобы сфокусировать проверяемый объект.
Примечание. Объективы с коротким фокусным расстоянием (менее 12 мм) создают изображения со значительным искажением. Если ваше приложение чувствительно к искажению изображения, попробуйте увеличить рабочее расстояние и используйте объектив с большим фокусным расстоянием. Если вы не можете изменить рабочее расстояние, вы несколько ограничены в выборе объектива.
Для вашей камеры Basler используйте инструмент Basler Lens Selector.
Согласование камеры с разрешением микроскопа
Максимальное разрешение датчика изображения с устройством с зарядовой связью ( CCD ) или дополнительным металлооксидным полупроводниковым датчиком ( CMOS ) зависит от количества фотодиодов и их размера относительно проецируемого изображения. на поверхность матрицы изображения с помощью оптической системы микроскопа.При попытке согласовать оптическое разрешение микроскопа с определенной комбинацией цифровой камеры и видеоперехода используйте этот калькулятор для определения минимальной плотности пикселей, необходимой для адекватного захвата всех оптических данных с микроскопа.
Учебное пособие инициализируется случайным образом выбранным образцом, появляющимся в окне Изображение образца (черный ящик) и ограниченным апертурой окуляра или диафрагмой поля проекционного объектива. Цветной прямоугольник, обозначающий размеры ПЗС-матрицы (по умолчанию 2/3 дюйма), накладывается на изображение, чтобы показать фактическую площадь образца, которая была захвачена датчиком.В серых, желтых и красных полях под ползунками: микроскоп , оптическое разрешение (серый), CCD Требуемый размер пикселя (желтый), Оптимальный размер матрицы CCD (желтый), Увеличение монитора (красный) и Общее увеличение (красный) изображения представлены в микрометрах или произведении. Эти значения постоянно обновляются по мере перевода ползунков. Новый формат ПЗС (размер) можно выбрать с помощью переключателей, появляющихся слева от окна Образец изображения .Физические размеры ПЗС выбранного датчика (в миллиметрах) отображаются в правой части окна изображения вдоль прямоугольника, имеющего то же соотношение сторон, что и микросхема формирования изображения.
Для работы с учебным пособием переместите ползунки числовой апертуры и увеличения объектива (значения отображаются над ползунками), чтобы установить соответствующие значения для рассматриваемой оптической конфигурации микроскопа. Затем выберите окуляр или проекционный объектив Номер поля (диапазон значений от 18 до 26 миллиметров) и Video Coupler увеличение (от 0.5x и 1,0x). При перемещении ползунка соединителя размер прямоугольника, наложенного на изображение образца, изменяется в учебном пособии, чтобы соответствовать площади образца, захваченной датчиком CCD. Новый образец можно выбрать в любой момент с помощью раскрывающегося меню «Выбрать образец» .
Эффективность захвата изображений, сгенерированных оптическим микроскопом, на матрицу фотодиодов ПЗС- или КМОП-матрицы зависит от нескольких факторов, от увеличения объектива, числовой апертуры и разрешения до размера матрицы фотодиодов электронного датчика изображения, аспекта соотношение, увеличение видеосоединителя и размеры отдельных фоточувствительных элементов в матрице.Кроме того, необходимо учитывать параметры, характерные для отображаемого образца, такие как контраст, отношение сигнал / шум, динамический диапазон внутри сцены и время интегрирования.
Максимальное оптическое разрешение ПЗС-матрицы зависит от количества фотодиодов и их размера относительно изображения, проецируемого на поверхность матрицы системой линз микроскопа. Доступные в настоящее время матрицы ПЗС варьируются по размеру от нескольких сотен до многих тысяч пикселей. Современные размеры массивов, используемых в приборах, предназначенных для научных исследований, составляют от 1000 × 1000 до 5000 × 5000 сенсорных элементов.Тенденция в производстве ПЗС потребительского и научного уровня заключается в том, что размер сенсора постоянно уменьшается, и в настоящее время доступны цифровые камеры с фотодиодами размером всего 4 × 4 микрометра.
Адекватное разрешение образца, отображаемого с помощью оптических элементов микроскопа, может быть достигнуто только в том случае, если для каждой разрешимой единицы сделано не менее двух образцов, хотя многие исследователи предпочитают три образца на разрешимую единицу, чтобы гарантировать достаточный выбор. В оптических приборах с ограничением дифракции, таких как микроскоп, предел Аббе оптического разрешения при средней длине волны видимого света (550 нанометров) равен 0.20 мкм при использовании объектива с числовой апертурой 1,4. В этом случае размер сенсора в 10 квадратных микрометров будет достаточно большим, чтобы обеспечить соответствие оптического и электронного разрешения, при этом предпочтительным будет размер сенсора 7 × 7 микрометров. Хотя меньшие фотодиоды в датчике изображения CCD улучшают пространственное разрешение, они также ограничивают динамический диапазон устройства.
В микроскопии изображение обычно проецируется оптической системой на поверхность детектора, которым может быть сетчатка человеческого глаза, электрический датчик изображения или чувствительная химическая эмульсия на традиционной пленке.Чтобы оптимизировать информативность получаемого изображения, разрешение детектора должно точно соответствовать разрешению микроскопа. Спектр длин волн видимого света, используемый для создания изображения образца, является одним из определяющих факторов в работе микроскопа в отношении оптического разрешения. Более короткие длины волн (375-500 нанометров) позволяют разрешить детали в большей степени, чем более длинные волны (более 500 нанометров). Пределы пространственного разрешения также продиктованы дифракцией света через оптическую систему, термин, который обычно называют разрешающей способностью с ограничением дифракции .Исследователи вывели несколько уравнений, которые использовались для выражения взаимосвязи между числовой апертурой, длиной волны и оптическим разрешением:
Где r — разрешение (наименьшее разрешаемое расстояние между двумя точками образца), NA равно числовой апертуре объектива, λ равно длине волны, NA (Obj) равно числовой апертуре объектива, а NA (Cond) — числовая апертура конденсатора. Обратите внимание, что уравнения (1) и (2) отличаются коэффициентом умножения, который равен 0.5 для уравнения (1) и 0,61 для уравнения (2) . Эти уравнения основаны на ряде факторов, включая множество теоретических расчетов, выполненных физиками-оптиками для учета поведения объективов и конденсаторов, и не должны рассматриваться как абсолютное значение какого-либо одного общего физического закона. Предполагается, что два точечных источника света могут быть разрешены (отдельно отображены), когда центр диска Эйри, созданный одним из источников, перекрывается с отражением первого порядка в дифракционной картине второго диска Эйри, состояние, известное как Критерий Рэлея .В некоторых случаях, таких как конфокальная и многофотонная флуоресцентная микроскопия, разрешение может фактически превышать пределы, установленные любым из этих трех уравнений. Другие факторы, такие как низкий контраст образца и неправильное освещение, могут способствовать снижению разрешения и, чаще всего, реальному максимальному значению r (около 0,20 микрон при длине волны среднего спектра 550 нанометров) и числовая апертура от 1,35 до 1,40 на практике не реализуется.
Когда микроскоп находится в идеальном положении и объективы соответствующим образом согласованы с конденсатором подстадия, числовое значение апертуры объектива можно подставить в уравнения (1), и (2), , с добавленным результатом, что уравнение ) сводится к уравнению (2) .Важно отметить, что увеличение не фигурирует как фактор ни в одном из этих уравнений, потому что только числовая апертура и длина волны освещения определяют разрешение образца. Как упоминалось выше (и это можно наблюдать в уравнениях) длина волны света является важным фактором в разрешающей способности микроскопа. Более короткие длины волн дают более высокое разрешение (более низкие значения для r ) и наоборот. Наибольшая разрешающая способность в оптической микроскопии достигается с помощью света, близкого к ультрафиолетовому, — самой короткой эффективной длины волны изображения.За ближним ультрафиолетовым светом следует синий, затем зеленый и, наконец, красный свет, что позволяет различать детали образца. В большинстве случаев микроскописты используют белый свет широкого спектра, излучаемый вольфрамово-галогенной лампой, для освещения образца. Спектр видимого света составляет около 550 нанометров, это основная длина волны зеленого света (наши глаза наиболее чувствительны к зеленому свету). Именно эта длина волны использовалась для расчета значений разрешения в учебном пособии и представлена в таблице 1.Значение числовой апертуры также важно в этих уравнениях, и более высокие числовые апертуры также обеспечат более высокое разрешение (см. Таблицу 1).
ObjectID | Обязательно | Числовой | Уникальный идентификатор номера для каждой камеры. | |
CameraID | Обязательно | Строка | Первичный ключ, определяющий параметры камеры. | |
FocalLength | Обязательно | Числовое | Фокусное расстояние объектива камеры, измеренное в микронах. | |
PrincipalX | Дополнительно | Числовой | Координата X главной точки автоколлимации, измеренная в микронах. Если не определено, значение по умолчанию — 0. Основная точка — это смещение между исходным центром и главной точкой автоколлимации (PPA).Предполагается, что главная точка симметрии (PPS) такая же, как и PPA. | |
Основные Y | Дополнительно | Числовые | Координата Y главной точки автоколлимации, измеренная в микронах. Если не определено, значение по умолчанию — 0. Основная точка — это смещение между реперным центром и PPA. Предполагается, что PPS совпадает с PPA. | |
BlockName | Необязательно | Строка | Имя блока (проекта), в котором находится изображение. | |
NRows | Необязательно | Числовой | Количество строк пикселей в изображении. | |
NColumns | Необязательно | Числовой | Количество столбцов пикселей в изображении. | |
NBands | Дополнительно | Числовой | Количество полос пикселей в изображении. | |
PixelType | Необязательно | Числовой или Строка | Тип пикселя для изображения в виде числового значения, соответствующего rstPixelType или соответствующей строки. | Числовое значение, соответствующее rstPixelType: PT_U1 = 0, PT_U2 = 1, PT_U4 = 2, PT_UCHAR = 3, PT_CHAR = 4, PT_USHORT = 5, PT_SHORT = 6, PT_ULONG = 7, PT_LONG = 8, = PT_LONG = 8, = PT_LONG = 8, = PT_DOUBLE = 10, PT_COMPLEX = 11, PT_DCOMPLEX = 12, PT_CSHORT = 12, PT_CLONG = 14. |
Строка соответствия: 8_BIT_UNSIGNED, 8_BIT_SIGNED, 16_BIT_UNSIGNED, 16_BIT_SIGNED, 32_BIT_UNSIGNED, 32_BIT_SIGNED, 32_BIT_FLOAT, 1_BIT_BIT, 2_BIT. | ||||
PixelSize | Дополнительно | Числовой | Размер пикселя сенсора. | Единица микрон. |
FilmCoordinateSystem (FCS) | Необязательно | Integer | Определяет пленочную систему координат сканируемого аэрофотоснимка и цифровой аэрофотосъемки.Он используется для вычисления реперной информации и построения аффинного преобразования. Обычно корпус цифровой аэрофотосъемки совмещен с X камеры. направление полета (вариант 1, X_RIGHT_Y_UP, по умолчанию). FCS используется для размещения не стандартные кейсы. |
|
SRS | Необязательно | Строка | Система координат, связанная с точкой перспективы как путь к файлу или WKID (код EPSG).Для кода EPSG системы координат для x, y и z разделены точкой с запятой (;), например 26918; 5773. Если не определен, по умолчанию используется указанная пользователем система координат или система координат, определенная в пространственной привязке данных мозаики. Пространственная привязка также может быть определена для каждого элемента изображения в наборе данных мозаики. Если параметр SRS определен как в таблице камер, так и в таблице кадров, значение в таблице кадров будет иметь приоритет. | |
OrientationType | Необязательно | Строка | Определяет способ описания параметров внешней ориентации вращения (EO).По умолчанию — OPK. | OPK — указывает, что параметры вращательного EO определены как углы в полях Omega, Phi, Kappa, Angle Direction и Polarity. |
Матрица — указывает, что параметры вращения EO определены как матрица из девяти коэффициентов в поле Матрица. | ||||
AverageZ | Дополнительно | Числовой | Средняя высота земли.По умолчанию используется значение, указанное в свойствах ортотрансформирования типа растра, или ноль, если оно не указано. | |
ApplyECC | Необязательно | Boolean | Указывает, следует ли учитывать кривизну земли при применении преобразований относительно координат земли. По умолчанию — ЛОЖЬ. | True — учитывает кривизну земли при применении преобразований относительно координат земли. |
Неверно — предполагается, что Земля плоская. | ||||
EarthRadius | Дополнительно | Числовое | Альтернативное значение, используемое для кривизны регулировки заземления. Значение по умолчанию — 6378137,0 метров. | Единицы измерения — метры. |
AngleDirection | Необязательно | Строка | Задает направление углов EO.Значение по умолчанию -1. | -1: указывает, что углы EO указаны по часовой стрелке. |
+1: указывает, что углы EO указаны в направлении против часовой стрелки. | ||||
Полярность | Необязательно | Числовой | Указывает, находится ли плоскость изображения на той же или на противоположной стороне перспективного центра, что и объект или плоскость земли.По умолчанию — 1, что является противоположной стороной. | -1: указывает противоположную сторону плоскости изображения. |
+1: указывает на ту же сторону плоскости изображения. | ||||
Тип искажения | Необязательно | Строка | Определяет способ описания искажения объектива. По умолчанию — DistortionModel. | По умолчанию используется модель искажения. |
Модель искажения — указывает, что коррекция искажения описывается коэффициентами, определенными в полях Radial и Tangential. | ||||
Таблица искажений — указывает, что искажение определяется как набор пар (r, v), указывающих радиальное расстояние и соответствующее значение искажения. Радиальные расстояния и радиальные искажения. поля должны быть заполнены. | ||||
Radial | Для типа искажения = DistortionModel | String | Задает набор из четырех разделенных пробелом или точкой с запятой коэффициентов, описывающих радиальное искажение, например 0; 0 для K0; K 1 ; K 2 ; K 3 . | |
Tangential | Для типа искажения = DistortionModel | String | Задает набор из двух разделенных пробелами или точками с запятой тангенциальных коэффициентов искажения, например 0 для коэффициентов тангенциального искажения ; 1 ; П 2 . | |
RadialDistances | Дополнительно | Строка | Радиальные расстояния, разделенные пробелом или точкой с запятой, указываются в виде упорядоченного набора значений N Единица измерения микрометры. | |
RadialDistortions | Необязательно | Строка | Значения искажения, разделенные пробелом или точкой с запятой, отображаются в виде упорядоченного набора из N значений Единица измерения микрометры. | |
FilmFiducials | Дополнительно | Numeric | Сохраняет реперные координаты камеры в микронах. | Формат — пары значений, разделенные точкой с запятой, например, «106003.0 -106000.0; -105997.0 -106001.0; -106002.0 105998.0; 105999.0 106000.0». В этом примере показаны четыре угловых реперных точки, тогда как некоторые камеры могут иметь четыре краевых реперных точки, в то время как другие камеры могут иметь 8 реперных точек. |
AffineDirection | Необязательно | Строка | Задает направление аффинного преобразования ввода-вывода. Если не указано, предполагается, что по умолчанию используется направление от изображения к фильму (+1). | +1: изображение на пленку. |
-1: преобразование пленки в изображение. | ||||
Поля A0, A1, A2 и B0, B1, B2 | Необязательно.Не требуется, если задан размер пикселя. | Числовой | Коэффициент аффинного преобразования, который устанавливает взаимосвязь между пространством изображения и пространством фильма. Направление этого преобразования указывается с помощью поля AffineDirection. Если это поле не существует, по умолчанию используется пространство изображения для пространства фильма. Единицы измерения — микроны. A0, A1, A2 представляет перенос по оси x. B0, B1, B2 представляет перевод в направлении y. |
Когда использовать режим обрезанного датчика — Oxford Instruments
Что такое режим обрезки сенсора?
- Специализированный режим считывания для достижения очень высокой частоты кадров (субмиллисекундные выдержки) со «стандартных» камер.
- Непрерывная быстрая загрузка изображений / спектров на жесткий диск.
- Размер кадрированного сенсора, выбираемый пользователем — интуитивно понятное программное обеспечение.
- Стандартный режим считывания для камеры iXon3 EMCCD, камер Newton (CCD и EMCCD) и iKon (CCD).
Если эксперимент требует быстрого временного разрешения, но не может быть ограничен максимальным размером памяти сенсора (как в случае с ‘Fast Kinetics Mode’ считывания), то можно считывать некоторые семейства камер Andor EMCCD или CCD. в специальном выбираемом пользователем режиме «Обрезанный датчик». В этом режиме пользователь определяет размер «подматрицы» в пределах всей области датчика изображения, чтобы он охватывал область изображения, в которой быстро происходят изменения (например,грамм. «кальциевая искра» внутри клетки). Впоследствии датчик «воображает», что он имеет этот меньший определенный размер массива, достигаемый за счет программного выполнения специальных шаблонов считывания, и считывает с пропорционально более высокой частотой кадров. Чем меньше размер заданного массива, тем выше достижимая частота кадров. Чтобы использовать режим «Обрезанный датчик», необходимо убедиться, что свет не падает на светочувствительную область за пределами определенной области. Любой свет, собранный за пределами обрезанной области, может испортить изображения, полученные в этом режиме.Режим обрезанного датчика имеет конечный результат достижения гораздо более высокой частоты кадров, чем та, которая достигается при обычном считывании «подмассивов» / ROI (во время которого нам все равно придется сдвигать по вертикали нежелательные строки). Увеличение частоты кадров достигается за счет того, что нежелательные пиксели не считываются (т. Е. Отбрасываются).
Рис. 1. Режим обрезанного датчика.
Активная область изображения датчика определяется таким образом, что только небольшая часть всего чипа используется для отображения.Оставшаяся область должна быть оптически замаскирована, чтобы предотвратить утечку света и перетекание заряда, которое может повлиять на сигнал из области формирования изображения. Обрезая сенсор, можно добиться более высокой частоты кадров, потому что временное разрешение будет определяться временем, необходимым для считывания небольшого участка сенсора.
Режим кадрированного датчика идеально подходит для ряда сложных приложений во многих различных областях исследований. С точки зрения технологического соответствия, кадрированный датчик хорошо подходит для быстрого применения камер EMCCD.Основным преимуществом и отличительной особенностью технологии EMCCD является ее способность практически исключить предел обнаружения шума считывания камеры при любой скорости считывания. Это позволяет успешно использовать детекторы EMCCD в приложениях, где необработанные требования к чувствительности и времени экспозиции в конечном итоге не позволяют использовать обычные системы CCD. В биологической визуализации режим обрезанного датчика может успешно использоваться для повышения производительности и пропускной способности в «наноскопических» приложениях сверхвысокого разрешения, включая STORM и PALMIRA.Частота кадров изображения, превышающая 1000 / с, может быть достигнута при достаточно небольшой площади под урожай. Серия измерений, выполненных на камере Andor iXon + 885 EMCCD, продемонстрировала, что режим кадрированного сенсора в сочетании с биннингом позволил увеличить скорость до 4000 кадров в секунду.
| Размер кадрированного изображения (в пикселях) | Скорость (кадр / с) | Скорость (кадр / с) |
| Без бункера | Бункер 2 x 2 | |
| 10 х 10 | 4194 | 6250 |
| 20 х 20 | 2430 | 3927 |
| 50 х 50 | 1050 | 1786 |
| 100 x 100 | 547 | 958 |
Таблица 1: Потенциал частоты кадров изображения камеры Andor iXon3 885 EMCCD в условиях считывания в режиме обрезанного датчика.
Значительное улучшение разрешения изображения бактериальной клетки E.coli было продемонстрировано Александром Эгнером в его статье, описывающей быстрое получение изображений PALM с использованием высокоскоростного Andor iXon3 860 EMCCD (рис. 2).
Рисунок 2: Получение изображений E. coli Обычное (A) и PALMIRA (B) изображение криосреза цитоплазматической мембраны толщиной 200 нм, меченного E. coli (из: A. Egner et al., Biophys J, 2007)
Адаптивная оптикана основе EMCCD, для которой часто используются датчики EMCCD меньшего формата, может выиграть от обрезанного показания датчика.Компактные диски EMCCD уже могут работать со скоростью> 500 кадров в секунду и могут быть гибко оптимизированы в режиме кадрирования до более 2000 кадров в секунду. Использование режима кадрирования сенсора открывает новые возможности для очень быстрой адаптивной оптической визуализации, позволяя пользователям достигать нескольких тысяч кадров в секунду. Поскольку режим кадрированного изображения можно использовать как в режиме изображения, так и в режиме полного вертикального биннинга, это делает его очень привлекательной функцией для получения спектральных изображений EMCCD с помощью спектроскопической камеры Андора Ньютона. В таблице ниже приведены частоты кадров для режима кадрирования изображения при захвате спектра для двух моделей Newton EMCCD
.| Камера | Андор Ньютон DU970N | Андор Ньютон DU971N |
| Максимальный спектр / с Полностью вертикальный биннинг | 606 | 379 |
| Максимальный спектр / с Режим обрезки (20 строк в высоту) | 1316 | 1316 |
Таблица 2: Потенциал спектральной скорости камер Andor Newton EMCCD в условиях считывания в режиме обрезанного датчика по сравнению со «стандартной» скоростью полного вертикального бининга.
Спектроскопические камеры EMCCD Andor Newton позволяют виртуально уменьшить эффективный размер сенсора до узкого формата, требующего меньшего количества вертикальных сдвигов строк для получения заданного спектра. На рисунке 3 показан такой пример использования режима обрезанного датчика. Спектр выровнен по нижним рядам датчика, так что весь сигнал попадает в нижние двадцать рядов, и никакой сигнал не падает на остальную часть датчика. В процессе сбора данных EMCCD рассматривается как одна из 20 строк по высоте, считываемых в режиме FVB, т.е.е. 20 строк интегрируются в регистр считывания перед считыванием.
Рис. 3. Обрезанный режим спектрального сбора данных датчика в Andor Newton.
Верхняя панель показывает изображение, обрезанное для использования только его нижних 20 пикселей в качестве области отображения. Типичный спектр показан в середине с трехмерной визуализацией спектра в измерении высотой 20 пикселей ниже. Трехмерное изображение кинетической серии спектров, снятых в режиме кадрирования, часто используется для иллюстрации временных изменений развивающегося события.
Существует также возможность использования обрезанных EMCCD для конфокального сканирования мультиспектральной флуоресценции в качестве альтернативы массивам ФЭУ, которые традиционно использовались в этом подходе. Квантовая эффективность сенсора с задней подсветкой> 90%, чувствительность к одиночным фотонам, матричная архитектура и высокая скорость считывания пикселей могут быть использованы для заметного улучшения этого подхода. Время пребывания лазера должно совпадать со временем экспонирования и считывания короткого ряда примерно из 32 пикселей — спектральных каналов, достаточных для эффективного несмешивания нескольких известных излучающих красителей, что приводит к кубу данных размером 512 x 512 x 32 (спектральный), для генерации требуется менее 1 секунды.У пикселей EMCCD есть явное преимущество в чувствительности по сравнению с обычно используемой технологией PMT: примерно в 5 раз в сине-зеленом и до десяти раз в красном.
Модель камеры для камер линейного сканирования с телецентрическими объективами
На основе обсуждения в разд. 3, теперь мы можем получить модель камеры для камер линейного сканирования с телецентрическими объективами.
Модель камеры
Первый шаг модели камеры идентичен таковому в разд. 3.2: Преобразуем точки из системы координат калибровочного объекта в систему координат камеры по (1).Мы снова будем называть преобразованную точку \ ({{\ varvec {p}}} _ \ mathrm {c} \).
Для проецирования точки на изображение мы используем тот же подход, что и в Разд. 3.2: Мы пересекаем линию, по которой движется точка, с оптическим лучом точки, на которую она проецируется. Уравнение оптического луча дается формулой (11). В результате получается следующая система уравнений:
$$ \ begin {выровнено} u_x (x_ \ mathrm {d}, y_ \ mathrm {d}) / m & = x_ \ mathrm {c} — t v_x \ end {выровнено} $$
(14)
$$ \ begin {align} u_y (x_ \ mathrm {d}, y_ \ mathrm {d}) / m & = y_ \ mathrm {c} — t v_y \ end {align} $$
(15)
$$ \ begin {выровнено} \ lambda & = z_ \ mathrm {c} — t v_z, \ end {выровнено} $$
(16)
где \ ({{\ varvec {u}}} ({{\ varvec {p}}}) = (u_x (x_ \ mathrm {d}, y_ \ mathrm {d}), u_y (x_ \ mathrm { d}, y_ \ mathrm {d})) ^ {\ top} \) определяется как в разд.3.2. Видно, что \ (\ lambda \) не входит в (14) и (15). Следовательно, ни \ (z_ \ mathrm {c} \), ни \ (v_z \) не влияют на проекцию, и мы можем опустить (16). Следовательно, камеры с линейным сканированием с телецентрическими объективами выполняют ортогональную проекцию, как и камеры с линейным сканированием с телецентрическими объективами. Таким образом, что касается таксономии Sturm et al. (2010), камеры линейного сканирования с телецентрическими линзами являются центральными камерами (Sturm et al., 2010, раздел 3), в отличие от камер линейного сканирования с энтоцентрическими линзами, которые являются осевыми камерами (Ramalingam et al.2006; Sturm et al. 2010, раздел 3.1.4). Кроме того, что касается таксономии Ye and Yu (2014), камеры с линейным сканированием с телецентрическими объективами являются ортогональными камерами, а не с ручными вениками.
Для полиномиальной модели уравнения. (14) и (15) определяют систему полиномиальных уравнений степени 7 относительно неизвестных \ (x_ \ mathrm {d} \) и t . Следовательно, уравнения не могут быть решены аналитически, т.е. для их решения должен использоваться алгоритм численного корня. Однако для модели деления возможно аналитическое решение.2}} — 4 \ kappa x_0 \ Bigl (x_0 d_0 + {\ displaystyle \ frac {y_ \ mathrm {d}} {m} \ frac {v_x} {v_y}} \ Bigr)}} {2 \ kappa x_0} . \ end {align} $$
(23)
Для \ (\ kappa = 0 \) или \ (x_0 = 0 \) (22) сводится к линейному уравнению. Рассмотрим оба случая по очереди. Для \ (x_0 = 0 \) имеем:
$$ \ begin {выровненный} x_ \ mathrm {d} = y_ \ mathrm {d} \ frac {v_x} {v_y}. \ end {align} $$
(24)
Вставка значения \ (x_ \ mathrm {d} \), полученного из (23) или (24), в (19) возвращает значение t в обоих случаях.Для \ (\ kappa = 0 \) имеем:
$$ \ begin {выровнено} x_ \ mathrm {d} = m x_0 + y_ \ mathrm {d} \ frac {v_x} {v_y}. \ end {align} $$
(25)
В этом случае уравнение. (19) можно упростить до:
$$ \ begin {align} t = \ frac {1} {v_y} \ Bigl (y_ \ mathrm {c} — \ frac {y_ \ mathrm {d}} {m} \ Бигр). \ end {align} $$
(26)
Обратите внимание, что для \ (\ kappa = 0 \) \ (y_ \ mathrm {d} \), то есть \ (c_y \), не имеет смысла (см.Замечания 8 и 20). Следовательно, если априори известно, что \ (\ kappa = 0 \), \ (c_y \) (и, следовательно, \ (y_ \ mathrm {d} \)) следует установить в 0, что упрощает уравнения даже далее по адресу:
$$ \ begin {выровнено} x_ \ mathrm {d} & = m x_0 = m \ biggl (x_ \ mathrm {c} — y_ \ mathrm {c} \ frac {v_x} {v_y} \ biggr ) \ end {align} $$
(27)
$$ \ begin {align} t & = \ frac {y_ \ mathrm {c}} {v_y}. \ end {align} $$
(28)
Если есть искажения линзы, из (23) видно, что есть два возможных решения для проецирования на изображение, тогда как в случаях без искажений (24) и (25) существует единственное решение.2}} — 4 \ kappa x_0 \ Bigl (x_0 d_0 + {\ displaystyle \ frac {y_ \ mathrm {d}} {m} \ frac {v_x} {v_y}} \ Bigr)}} {2 \ kappa x_0} . \ end {align} $$
(29)
Проба
Чтобы доказать утверждение, мы исследуем предел (23) для \ (\ kappa \ rightarrow 0 \). Очевидно, это решение должно сходиться к (25) для правильного решения, потому что (17) и (18) непрерывны вокруг \ (\ kappa = 0 \). Сначала мы исследуем решение в (29) и заметим, что числитель и знаменатель сходятся к 0 для \ (\ kappa \ rightarrow 0 \).2}} — 4 \ каппа x_0 \ left (x_0 d_0 + {\ displaystyle \ frac {y_ \ mathrm {d}} {m} \ frac {v_x} {v_y}} \ right)}} \ nonumber \\ & \ quad = m x_0 + y_ \ mathrm {d} \ frac {v_x} {v_y}. \ end {align} $$
(30)
Следовательно, уравнение. (29) сходится к (25) для \ (\ kappa \ rightarrow 0 \). Теперь рассмотрим решение (23) со знаком плюс и заметим, что числитель сходится к 2/ м для \ (\ kappa \ rightarrow 0 \), а знаменатель сходится к 0. Следовательно, второе решение сходится к \ (\ infty \) для \ (\ kappa \ rightarrow 0 \).{\ top} \) в системе координат камеры можно вычислить, как описано в примечании 13. Затем эту точку можно проецировать на камеру с выпрямлением, для которой все коэффициенты искажения были установлены на 0. Более того, любой перекос в пикселях может можно удалить, установив \ (v_x \) на 0 в выпрямленной камере. Наконец, квадратные пиксели могут быть усилены установкой \ (s_x \) на \ (\ min (s_x, m v_y) \), а затем установкой \ (v_y \) на \ (s_x / m \). Такой подход гарантирует отсутствие наложения спектров при исправлении изображения.
Замечание 15
Как и в случае камер линейного сканирования с энтоцентрическими линзами (см.Замечание 12), перепроецирование изображения на мировую плоскость возможно для камер линейного сканирования с телецентрическими объективами.
Калибровка
Подобно моделям камер, описанным в разд. 3 камера калибруется с помощью плоского калибровочного объекта, представленного в Steger (2017, раздел 9). Калибровочный объект имеет шестиугольную схему круговых контрольных точек. Он был разработан таким образом, что может покрывать все поле зрения. Дальнейшие преимущества этого типа калибровочного объекта обсуждаются в Steger (2017, раздел 9).
Обозначим известные трехмерные координаты центров контрольных точек объекта калибровки как \ ({{\ varvec {p}}} _ j \) (\ (j = 1, \ ldots, n_ \ mathrm {m } \), где \ (n_ \ mathrm {m} \) обозначает количество контрольных точек на калибровочном объекте). Пользователь получает \ (n_ \ mathrm {o} \) изображения калибровочного объекта. Обозначим параметры внешнего ориентирования калибровочного объекта на изображении l как \ ({{\ varvec {e}}} _ l \) (\ (l = 1, \ ldots, n_ \ mathrm {o} \)) , параметры внутреннего ориентирования камеры — на \ ({{\ varvec {i}}} \), а проекцию точки в системе координат калибровочного объекта на систему координат изображения — на \ ({\ varvec {\ pi} } \) (ср.2. \ end {align} $$
(35)
Минимизация выполняется подходящей версией разреженных алгоритмов Левенберга – Марквардта, описанных в Hartley and Zisserman (2003, приложение A6).
Точки \ ({{\ varvec {p}}} _ {jl} \) извлекаются путем подгонки эллипсов (Фитцгиббон и др., 1999) к краям, извлеченным с помощью субпиксельного экстрактора краев (Steger 1998b, Chapter 3.3; Steger 2000). Как обсуждали Стегер (2017, раздел 5.2) и Мэллон и Уилан (2007), это вызывает смещение в позициях точек.Поскольку телецентрические камеры с линейным сканированием выполняют ортогональную проекцию, смещения перспективы нет, то есть смещение состоит исключительно из смещения искажения. Смещение можно устранить с помощью подхода для энтоцентрических камер с линейным сканированием, описанного Стегером (2017, раздел 10).
Оптимизация (35) требует начальных значений неизвестных параметров. Начальные значения для параметров внутреннего ориентирования, за исключением вектора движения, можно получить из технических характеристик камеры и объектива, как описано в примечании 1.В отличие от камер сканирования площади, \ (c_y = 0 \) обычно используется в качестве начального значения. Приблизительное значение для \ (v_y \) обычно будет известно из соображений, которые привели к настройке камеры линейного сканирования. Наконец, \ (v_x \) обычно можно установить в 0. При известных начальных значениях для внутреннего ориентирования точки изображения \ ({{\ varvec {p}}} _ {jl} \) могут быть преобразованы в метрические координаты в систему координат камеры с использованием (31) — (33). Это позволяет нам использовать алгоритм O n P, описанный Steger (2018), для получения оценок внешней ориентации калибровочного объекта.
Замечание 16
Алгоритм Левенберга – Марквардта требует частных производных от \ (x_ \ mathrm {i} \) и \ (y_ \ mathrm {i} \) по параметрам внутреннего и внешнего ориентирования модели камеры. Это, в свою очередь, требует частных производных от \ (x_ \ mathrm {d} \) и t по параметрам внутреннего ориентирования. Их можно вычислить аналитически, используя теорему о неявной функции (de Oliveira 2013).
Камеры с линейным сканированием и телецентрическими линзами с проективной геометрией
В этом разделе мы рассмотрим телецентрические камеры с линейным сканированием без искажений объектива. В этом случае уравнения (27), (28) и (13) могут быть записаны в виде следующей калибровочной матрицы:
$$ \ begin {align} {{{\ mathbf {\ mathtt {{K}}}}}} = \ left (\ begin {array} {ccc} a & {} \ quad -a \, v_x / v_y & {} \ quad 0 \\ 0 & {} \ quad 1 / v_y & {} \ quad 0 \\ 0 & { } \ quad 0 & {} \ quad 1 \ end {array} \ right).\ end {align} $$
(36)
Поскольку m, и \ (s_x \) не могут быть определены одновременно (см. Замечание 19), мы удалили это избыточное параметрирование, используя параметр \ (a = m / s_x \). Кроме того, поскольку главная точка не определена, если нет искажений (см. Замечание 20), мы использовали \ (c_x = c_y = 0 \). Footnote 6 Орфографическую проекцию, которую выполняет телецентрическая камера линейного сканирования, можно записать как:
$$ \ begin {align} {{{\ mathbf {\ mathtt {{O}}}}}} = \ left ( \ begin {array} {cccc} 1 & {} \ quad 0 & {} \ quad 0 & {} \ quad 0 \\ 0 & {} \ quad 1 & {} \ quad 0 & {} \ quad 0 \\ 0 & {} \ quad 0 & {} \ quad 0 & {} \ quad 1 \ end {array} \ right).\ end {align} $$
(37)
Наконец, положение камеры относительно мировой системы координат может быть записано как однородная матрица \ (4 \ times 4 \) \ ({{{\ mathbf {\ mathtt {{H}}}}}}} \) (см. раздел 3.1). Следовательно, при отсутствии искажений камеры с линейной разверткой и телецентрическими объективами являются аффинными камерами (Hartley and Zisserman 2003, глава 6.3.4) со следующей матрицей камеры:
$$ \ begin {выровнено} {{{\ mathbf { \ mathtt {{P}}}}}} = {{{\ mathbf {\ mathtt {{K}}}}}} {{{\ mathbf {\ mathtt {{O}}}}}}} {{{\ mathbf {\ mathtt {{H}}}}}}.\ end {align} $$
(38)
Обычную аффинную камеру можно записать в виде следующей матрицы камеры:
$$ \ begin {align} {{{\ mathbf {\ mathtt {{M}}}}}} = \ left (\ begin {array} {cccc} m_ {11} & {} \ quad m_ {12} & {} \ quad m_ {13} & {} \ quad m_ {14} \\ m_ {21} & {} \ quad m_ {22} & {} \ quad m_ {23} & {} \ quad m_ {24} \\ 0 & {} \ quad 0 & {} \ quad 0 & {} \ quad 1 \ end {array} \ right), \ end { выровнено} $$
(39)
, где верхняя левая подматрица \ (2 \ times 3 \) должна иметь ранг 2 (Hartley and Zisserman 2003, Chapter 6.3.4). \ ({{{\ mathbf {\ mathtt {{M}}}}}} \) имеет восемь степеней свободы: его элементы \ (m_ {ij} \) (\ (i = 1,2 \), \ ( j = 1, \ ldots, 4 \)) (Хартли и Зиссерман, 2003, глава 6.3.4). Матрица камеры в (38) также имеет восемь степеней свободы: a , \ (v_x \), \ (v_y \), \ (t_x \), \ (t_y \), \ (\ alpha \), \ (\ beta \) и \ (\ gamma \). Поэтому естественно проверить, может ли общая аффинная матрица камеры \ ({{{\ mathbf {\ mathtt {{M}}}}}} \) однозначно разложиться на восемь параметров телецентрической камеры с линейным сканированием без искажения объектива.
Теорема 1
Каждую аффинную матрицу камеры \ ({{{\ mathbf {\ mathtt {{M}}}}}} \) можно разложить на восемь параметров a , \ (v_x \), \ (v_y \), \ (t_x \), \ (t_y \), \ (\ alpha \), \ (\ beta \) и \ (\ gamma \) телецентрической камеры линейного сканирования без искажений объектива. В разложении есть двоякая двусмысленность: если допустимое разложение \ ({{{\ mathbf {\ mathtt {{M}}}}}} \) дается как \ ((a, v_x, v_y, t_x, t_y , \ alpha, \ beta, \ gamma) \), другое допустимое разложение — \ ((a, v_x, -v_y, t_x, -t_y, \ alpha + \ pi, \ beta, \ gamma) \).2}. \ end {align} $$
(46)
Мы можем решить (46) для \ (v_y \):
$$ \ begin {align} v_y = \ pm \ frac {1} {\ sqrt {\ omega _ {22}}}. \ end {align} $$
(47)
Подстановка \ (v_y \) в (45) и решение для \ (v_x \) приводит к:
$$ \ begin {align} v_x = — \ frac {\ omega _ {12}} {a \ omega _ {22}}. 2} {\ omega _ {22}}}.{-1} {{{\ mathbf {\ mathtt {{M}}}}}} \) содержит \ (t_x \) и \ (t_y \).
Теперь мы исследуем, какое влияние на позу оказывают два различных решения для параметров внутреннего ориентирования. Две разные калибровочные матрицы задаются следующим образом:
$$ \ begin {align} {{{\ mathbf {\ mathtt {{K}}}}}}} _ 1 & = \ left (\ begin {array} {ccc} a & {} \ quad -a \, v_x / v_y & {} \ quad 0 \\ 0 & {} \ quad 1 / v_y & {} \ quad 0 \\ 0 & {} \ quad 0 & {} \ quad 1 \ конец {массив} \ право) \ конец {выровненный} $$
(52)
$$ \ begin {align} {{{\ mathbf {\ mathtt {{K}}}}}} _ 2 & = \ left (\ begin {array} {ccc} a & {} \ quad a \, v_x / v_y & {} \ quad 0 \\ 0 & {} \ quad -1 / v_y & {} \ quad 0 \\ 0 & {} \ quad 0 & {} \ quad 1 \ end {array} \ right) \ end {выровнено} $$
(53)
Их обратные значения даются следующим образом:
$$ \ begin {выровнены} {{{\ mathbf {\ mathtt {{K}}}}}} _ 1 ^ {- 1} & = \ left (\ begin {array} {ccc} 1 / a & {} \ quad v_x & {} \ quad 0 \\ 0 & {} \ quad v_y & {} \ quad 0 \\ 0 & {} \ quad 0 & {} \ quad 1 \ end {array} \ right) \ end {align} $$
(54)
$$ \ begin {выровнено} {{{\ mathbf {\ mathtt {{K}}}}}} _ 2 ^ {- 1} & = \ left (\ begin {array} {ccc} 1 / a & { } \ quad v_x & {} \ quad 0 \\ 0 & {} \ quad -v_y & {} \ quad 0 \\ 0 & {} \ quad 0 & {} \ quad 1 \ end {array} \ right) \ конец {выровнен} $$
(55)
Поскольку единственное различие между двумя инверсиями — это знак элемента (2, 2), это означает, что когда \ ({{{\ mathbf {\ mathtt {{H}}}}}}} _ {1,2 } \) вычисляются как \ ({{\ mathbf {\ mathtt {{K}}}}}} _ {1,2} ^ {- 1} {{{\ mathbf {\ mathtt {{M}}}} }}} \), два решения \ ({{{\ mathbf {\ mathtt {{H}}}}}} _ 1 \) и \ ({{{\ mathbf {\ mathtt {{H}}}}}} } _2 \) будут иметь обратные знаки во второй строке.Если третья строка матрицы вращения вычисляется с помощью векторного произведения, две матрицы вращения \ ({{{\ mathbf {\ mathtt {{R}}}}}} _ 1 \) и \ ({{{{\ mathbf { \ mathtt {{R}}}}}} _ 2 \) будут отличаться обратными знаками во второй и третьей строках. Это соответствует умножению на матрицу \ ({{{\ mathbf {\ mathtt {{Q}}}}}} = {\ mathrm {diag}} (1, -1, -1) \) слева. Обратите внимание, что \ ({{{\ mathbf {\ mathtt {{Q}}}}}} \) — это поворот на \ (\ pi \) вокруг оси \ ({{\ varvec {x}}}} \). Поскольку в нашем представлении углов Эйлера вращение вокруг оси \ ({{\ varvec {x}}} \) выполняется в последнюю очередь (см. Разд.3.1), умножение на \ ({{\ mathbf {\ mathtt {{Q}}}}}} \) слева соответствует добавлению \ (\ pi \) к \ (\ alpha \). Это показывает, что для первого решения \ ((a, v_x, v_y) \) параметров внутреннего ориентирования решение для параметров позы задается как \ ((t_x, t_y, \ alpha, \ beta, \ gamma) \ ), в то время как для второго решения \ ((a, v_x, -v_y) \) параметров внутреннего ориентирования решение для параметров позы задается как \ ((t_x, -t_y, \ alpha + \ pi, \ beta , \ гамма) \). \ (\ квадрат \)
Замечание 17
Поворот на \ (\ pi \) вокруг оси \ ({{\ varvec {x}}} \) соответствует просмотру объекта спереди или сзади.Следовательно, если камера получает изображения непрозрачных объектов, обычно можно выбрать правильное решение. Однако при получении изображений прозрачных объектов, что имеет место в приложениях с подсветкой (по крайней мере, в этом случае калибровочный объект должен быть прозрачным), на практике может возникнуть неоднозначность теоремы 1.
Замечание 18
Теорема 1 показывает, что каждая аффинная камера эквивалентна телецентрической камере линейного сканирования без искажений.С другой стороны, теорема 1 в Steger (2017) показывает, что каждая аффинная камера эквивалентна камере сканирования площади с двусторонним телецентрическим наклонным объективом без искажений. Следовательно, телецентрические камеры с линейным сканированием без искажений эквивалентны телецентрическим камерам с зонным сканированием (с наклонными линзами, если пиксели перекошены). Это означает, что мы можем заменить телецентрические камеры с линейным сканированием без искажений на телецентрические камеры с линейным сканированием без искажений, если это удобно. В частности, это позволяет нам повторно использовать существующие алгоритмы телецентрических камер с линейным сканированием для телецентрических камер с линейным сканированием.
Отметим, что телецентрическая камера с линейной разверткой, исправленная с помощью подхода, описанного в Замечании 14, удовлетворяет вышеуказанному критерию отсутствия искажений. Следовательно, выпрямленная телецентрическая камера линейного сканирования с параметрами \ (m_ \ mathrm {l} = m \), \ (s_ {x, \ mathrm {l}} = s_x \), \ (s_ {y, \ mathrm { l}} = s_y \), \ (c_ {x, \ mathrm {l}} = c_x \), \ (c_ {y, \ mathrm {l}} = c_y \), \ (v_ {x, \ mathrm {l}} = 0 \) и \ (v_ {y, \ mathrm {l}} = v_y = s_x / m \) могут быть представлены телецентрической камерой для сканирования области (см.Разд. 3.1) с \ (m_ \ mathrm {a} = m \), \ (s_ {x, \ mathrm {a}} = s_x \), \ (s_ {y, \ mathrm {a}} = s_x \), \ (c_ {x, \ mathrm {a}} = c_x \) и \ (c_ {y, \ mathrm {a}} = c_y s_x / s_y \).
Вырождение модели
Замечание 19
Параметры модели телецентрических камер линейного сканирования завышены. Значения м, и \ (s_x \) не могут быть определены одновременно. Это можно решить, установив \ (s_x \) на начальное значение, указанное пользователем.{\ top} \) должен оставаться фиксированным на начальном значении, заданном пользователем (обычно \ (c_x \) устанавливается в центр изображения по горизонтали, а \ (c_y \) устанавливается в 0).
Замечание 21
Как и для энтоцентрических камер линейного сканирования (см. Замечание 10), параметры \ (P_1 \) и \ (P_2 \) модели полиномиального искажения сильно коррелируют с другими параметрами телецентрической модели камеры линейного сканирования, особенно если радиальные искажения небольшие.Поэтому их обычно невозможно определить надежно. Следовательно, на практике они должны быть установлены на 0 и должны быть исключены из калибровки.
Замечание 22
Ни \ (t_z \), ни \ (v_z \) не могут быть определены, поскольку они не влияют на проекцию (см. Раздел 4.1). Мы оставляем \ (v_z \) на начальном значении, указанном пользователем, и устанавливаем \ (t_z \) равным 1 м (см. Также замечание 3).
Замечание 23
Как описано в теореме 1 и замечании 17, существует неоднозначность знака для \ (v_y \).Следовательно, пользователь должен указать начальное значение \ (v_y \) с правильным знаком, чтобы калибровка сходилась к правильному решению.
Замечание 24
Как и в случае телецентрических камер сканирования площади (см. Замечание 4), поворот позы плоского калибровочного объекта может быть определен только с точностью до двоякой неоднозначности. Это частный случай переворота Неккера (Шапиро и др., 1995, раздел 4.1), когда объект плоский.В результате получаются два набора параметров позы \ ((\ alpha _l, \ beta _l, \ gamma _l) \) и \ ((- \ alpha _l, — \ beta _l, \ gamma _l) \) (с идентичными векторами перемещения) в тех же точках на изображении. Если в приложении требуется правильная внешняя ориентация калибровочного объекта, пользователь должен разрешить эту неоднозначность, выбрав правильную позу на основе предварительных знаний.
Предложение 2
Для плоского калибровочного объекта, если \ (c_y = 0 \) или если \ (c_y \ ne 0 \) и нет искажений (т.е.е., \ (\ kappa = 0 \) для модели деления), и если \ (\ beta = 0 \), то \ (v_y \), \ (\ alpha \) и \ (t_y \) не могут быть определяется одновременно.
Проба
Без ограничения общности можно считать, что планарный калибровочный объект лежит в плоскости \ (z = 0 \) в системе координат калибровочного объекта. Сначала предположим, что у нас есть камеры с \ (c_y = 0 \). Кроме того, предположим, что первая камера имеет \ (\ alpha _1 = 0 \), \ (t_ {y, 1} = t_y \) и \ (v_ {y, 1} = v_y \), где \ ( t_y \) и \ (v_y \) произвольны, но фиксированы.Кроме того, предположим, что остальные параметры внутреннего и внешнего ориентирования м , \ (c_x \), \ (s_x \), \ (s_y \), \ (v_x \), \ (t_x \) и \ ( \ gamma \) произвольны и одинаковы для обеих камер. Теперь мы можем выбрать произвольное значение \ (\ alpha \) для вращения вокруг оси \ ({{\ varvec {x}}} \) для второй камеры, то есть \ (\ alpha _2 = \ alpha \). Затем, задав \ (v_ {y, 2} = v_y \ cos \ alpha \) и \ (t_ {y, 2} = t_y \ cos \ alpha \), мы получаем камеру с идентичной геометрией проекции для точек в самолет \ (z = 0 \).{\ top} \), т.е. мы можем вычислить \ ({{\ varvec {p}}} _ {\ mathrm {i}, 1,2} = {{{\ mathbf {\ mathtt {{P}}}) }}} _ {1,2} {{\ varvec {p}}} _ \ mathrm {c} \). Сравнение полученных выражений для \ ({{\ varvec {p}}} _ {\ mathrm {i}, 1,2} \), которые мы здесь опускаем, показывает, что они идентичны. \ (\ квадрат \)
Предложение 3
Для плоского калибровочного объекта, если \ (c_y = 0 \) или если \ (c_y \ ne 0 \) и нет искажений (т. Е. \ (\ Kappa = 0 \) для модели разделения), и если \ (\ alpha = 0 \), тогда m , \ (v_x \), \ (\ beta \) и \ (t_x \) не могут быть определены одновременно.
Проба
Без ограничения общности можно считать, что планарный калибровочный объект лежит в плоскости \ (z = 0 \) в системе координат калибровочного объекта. Сначала предположим, что у нас есть камеры с \ (c_y = 0 \). Кроме того, предположим, что первая камера имеет \ (\ beta _1 = 0 \), \ (t_ {x, 1} = t_x \), \ (m_1 = m \) и \ (v_ {x, 1} = v_x \), где \ (t_x \), m и \ (v_x \) произвольные, но фиксированные. Кроме того, предположим, что остальные параметры внутреннего и внешнего ориентирования \ (c_x \), \ (s_x \), \ (s_y \), \ (v_y \), \ (t_y \) и \ (\ gamma \) произвольны и одинаковы для обеих камер.Теперь мы можем выбрать произвольное значение \ (\ beta \) для вращения вокруг оси \ ({{\ varvec {y}}} \) для второй камеры, то есть \ (\ beta _2 = \ beta \). Затем, установив \ (m_2 = m / \ cos \ beta \), \ (v_ {x, 2} = v_x \ cos \ beta \) и \ (t_ {x, 2} = t_x \ cos \ beta \ ), получаем камеру с идентичной геометрией проекции для точек на плоскости \ (z = 0 \). Если \ (c_y \ ne 0 \) и если нет искажений, мы также должны установить \ (c_ {y, 1} = c_y \) и \ (c_ {y, 2} = c_y / \ cos \ beta \) .
Для доказательства утверждения можно поступить так же, как при доказательстве предложения 2.\ (\ квадрат \)
Замечание 25
Предложение 2 показывает, что вращение плоского калибровочного объекта вокруг оси \ ({{\ varvec {x}}} \) может быть заменено разными значениями скорости \ (v_y \) и перемещения \ (t_y \) . Предложение 3 показывает, что вращение плоского калибровочного объекта вокруг оси \ ({{\ varvec {y}}} \) может быть заменено разными значениями увеличения м , скорости \ (v_x \) и перевод \ (t_x \).Поскольку параметры внутреннего и внешнего ориентирования, на которые влияют эти вырождения, не зависят друг от друга, мы предполагаем, что существует универсальное вырождение, которое означает, что параметры внутреннего и внешнего ориентирования не могут быть определены из одного изображения плоского калибровочного объекта, нет независимо от того, как калибровочный объект ориентирован в 3D. Докажем, что это так, в следующей теореме.
Теорема 2
Для одиночного изображения плоского калибровочного объекта, м , \ (v_x \), \ (v_y \), \ (\ alpha \), \ (\ beta \), \ (t_x \) и \ ( t_y \) нельзя определить одновременно, если \ (c_y = 0 \) или если \ (c_y \ ne 0 \) и нет искажений (т.е., \ (\ kappa = 0 \) для модели деления).
Проба
Без ограничения общности можно считать, что планарный калибровочный объект лежит в плоскости \ (z = 0 \). Кроме того, сразу видно, что поворот вокруг оси \ ({\ varvec {z}}} \) несущественен, поскольку поворот точки в плоскости \ (z = 0 \) на угол \ (\ gamma \) вокруг оси \ ({{\ varvec {z}}} \) просто соответствует другой точке на плоскости \ (z = 0 \).Следовательно, мы можем использовать \ (\ gamma = 0 \) в следующем.
Теперь покажем, что камера с параметрами м , \ (s_x \), \ (s_y \), \ (c_x = 0 \), \ (c_y = 0 \), \ (v_x \), \ ( v_y \), \ (t_x \), \ (t_y \), \ (\ alpha \) и \ (\ beta \) приводит к проекции, идентичной проекции камеры с параметрами \ (m / \ cos \ beta \) , \ (s_x \), \ (s_y \), \ (c_x = 0 \), \ (c_y = 0 \), \ (v_x \ cos \ beta \), \ (v_y f \), \ (t_x \ cos \ beta \), \ (t_y f \), \ (\ phi \) и \ (\ psi \) для подходящим образом выбранного множителя f и соответственно выбранных углов \ (\ phi \) и \ (\ psi \).Мы рассмотрим только случай отсутствия искажений объектива, поскольку для \ (c_y = 0 \) искажение происходит исключительно вдоль горизонтального направления изображения и, следовательно, может быть исправлено в каждой строке независимо.
Чтобы доказать, что два вышеуказанных набора параметров камеры приводят к одной и той же проекции, мы построим матрицу аффинного преобразования \ ({{{\ mathbf {\ mathtt {{A}}}}}} \) точек на плоскости \ (z = 0 \) в системе координат калибровочного объекта к точкам в плоскости изображения.{\вершина }. \ end {align} $$
(56)
Для первого набора параметров камеры это приводит к:
$$ \ begin {align} {{{\ mathbf {\ mathtt {{A}}}}}} _ 1 = \ left (\ begin {array} {ccc} a \ cos \ beta — \ frac {a v_x \ sin \ alpha \ sin \ beta} {v_y} & {} — \ frac {a v_x \ cos \ alpha} {v_y} & {} \ frac {a (t_x v_y — t_y v_x)} {v_y} \\ \ frac {\ sin \ alpha \ sin \ beta} {v_y} & {} \ frac {\ cos \ alpha} {v_y} & {} \ frac {t_y} {v_y} \\ 0 & {} 0 & {} 1 \ end {array} \ right), \ nonumber \\ \ end {align} $$
(57)
где \ (a = m / s_x \).Для второго набора параметров камеры получаем:
$$ \ begin {align} {{{\ mathbf {\ mathtt {{A}}}}}}} _ 2 = \ left (\ begin {array} {ccc} \ frac {a \ cos \ psi} {\ cos \ beta} — \ frac {a v_x \ sin \ phi \ sin \ psi} {v_y f} & {} — \ frac {a v_x \ cos \ phi} {v_y f} & {} \ frac {a (t_x v_y — t_y v_x)} {v_y} \\ \ frac {\ sin \ phi \ sin \ psi} {v_y f} & {} \ frac {\ cos \ phi} { v_y f} & {} \ frac {t_y} {v_y} \\ 0 & {} 0 & {} 1 \ end {array} \ right). \ nonumber \\ \ end {align} $$
(58)
Следовательно, мы видим, что часть перевода \ ({{{\ mathbf {\ mathtt {{A}}}}}} _ 1 \) и \ ({{{\ mathbf {\ mathtt {{A}}) }}}} _ 2 \) (их последние столбцы) идентичны.Это оставляет нам следующие четыре уравнения для f , \ (\ phi \) и \ (\ psi \):
$$ \ begin {align} & \ frac {a \ cos \ psi} {\ cos \ beta} — \ frac {a v_x \ sin \ phi \ sin \ psi} {v_y f} = a \ cos \ beta — \ frac {a v_x \ sin \ alpha \ sin \ beta} {v_y} \ end {выровнено } $$
(59)
$$ \ begin {align} & \ frac {a v_x \ cos \ phi} {v_y f} = \ frac {a v_x \ cos \ alpha} {v_y} \ end {align} $$
(60)
$$ \ begin {выровнено} & \ frac {\ sin \ phi \ sin \ psi} {v_y f} = \ frac {\ sin \ alpha \ sin \ beta} {v_y} \ end {выровнено} $$
(61)
$$ \ begin {align} & \ frac {\ cos \ phi} {v_y f} = \ frac {\ cos \ alpha} {v_y}.\ end {align} $$
(62)
Решаем (62) для f и получаем:
$$ \ begin {align} f = \ frac {\ cos \ phi} {\ cos \ alpha}. \ end {align} $$
(63)
Подставляя (63) в (60), получаем уравнение, которое выполняется тавтологически. Таким образом, мы подставляем (63) в (61) и упрощаем, чтобы получить:
$$ \ begin {align} \ tan \ phi \ sin \ psi = \ tan \ alpha \ sin \ beta, \ end {align} $$
(64)
, который мы решаем для \ (\ tan \ phi \):
$$ \ begin {align} \ tan \ phi = \ frac {\ tan \ alpha \ sin \ beta} {\ sin \ psi}.\ end {align} $$
(65)
Подставляя (63) в (59) и упрощая, получаем:
$$ \ begin {align} & \ frac {a v_y \ cos \ psi} {\ cos \ beta} — a v_x \ cos \ alpha \ tan \ phi \ sin \ psi \ nonumber \\ & \ quad = a v_y \ cos \ beta — a v_x \ sin \ alpha \ sin \ beta. \ end {align} $$
(66)
Подставляя (65) в (66), получаем:
$$ \ begin {align} & \ frac {a v_y \ cos \ psi} {\ cos \ beta} — a v_x \ sin \ alpha \ sin \ beta \ nonumber \\ & \ quad = a v_y \ cos \ beta — a v_x \ sin \ alpha \ sin \ beta.{\ top} \), отметим (см. сноску 6), что \ (c_ {y, 1} ‘= c_ {y, 1} s_y / (m v_y) \) для первой камеры и \ (c_ {y, 2} ‘= c_ {y, 2} s_y \ cos \ beta / (m v_y f) \) для второй камеры, откуда \ (c_ {y, 2} = c_ {y, 1} (f / \ cos \ бета) \). Кроме того, для первой камеры \ (c_ {x, 1} ‘= -c_ {y, 1} (s_y / s_x) (v_x / v_y) + c_ {x, 1} \), а для второй камеры, \ (c_ {x, 2} ‘= -c_ {y, 2} (s_y / s_x) (v_x \ cos \ beta) / (v_y f) + c_ {x, 2} \). Подстановка \ (c_ {y, 2} = c_ {y, 1} (f / \ cos \ beta) \) в последнее уравнение показывает, что \ (c_ {x, 2} = c_ {x, 1} \).\ (\ квадрат \)
Таблица 1 Пример параметров внутреннего и внешнего ориентирования, которые приводят к идентичным проекциям плоских объектов на плоскость \ (z = 0 \)Замечание 26
В таблице 1 показан пример параметров внутреннего и внешнего ориентирования, которые приводят к идентичным проекциям плоских объектов на плоскость \ (z = 0 \), которые были получены с помощью решения в доказательстве теоремы 2.
Замечание 27
Из доказательства теоремы 2 может показаться, что существует только двоякая двусмысленность. Однако это вызвано только тем фактом, что мы выбрали конкретные значения \ (m / \ cos \ beta \), \ (v_x \ cos \ beta \) и \ (t_x \ cos \ beta \) для вторая камера, чтобы максимально упростить доказательство. Если бы были выбраны другие коэффициенты вместо \ (\ cos \ beta \), значения f , \ (\ phi \) и \ (\ psi \) изменились бы соответственно.Поэтому, как и в предложениях 2 и 3, вырождение вполне общее.
Следствие 1
Приведенные выше результаты показывают, что телецентрические камеры с линейным сканированием нельзя откалибровать по одному изображению плоского калибровочного объекта. Следовательно, для калибровки камеры необходимо использовать несколько изображений плоского калибровочного объекта с разной внешней ориентацией, если все параметры должны быть определены однозначно.
Замечание 28
В приложениях машинного зрения иногда бывает важно откалибровать камеру по одному изображению.Как показано выше, это приведет к тому, что параметры камеры будут отличаться от их истинных значений. Однако, если остаточная ошибка калибровки достаточно мала, будет получена геометрия камеры, согласованная в пределах плоскости, которая определяется внешней ориентацией объекта калибровки (и всех параллельных ему плоскостей). Следовательно, изображение или элементы, извлеченные из изображения, могут быть исправлены в этой плоскости (см. Замечание 15). С другой стороны, алгоритмы, которые полагаются исключительно на внутреннюю ориентацию, например.g., чистое удаление радиальных искажений в Замечании 14 менее полезно, потому что неоднозначности относительно m и \ (v_y \) подразумевают, что мы не можем надежно неискажать изображение или элементы, извлеченные из изображения, чтобы иметь квадратные пиксели.
Имеет ли значение размер пикселя Clarkvision.com
Имеет ли значение размер пикселя Clarkvision.comЦифровые фотоаппараты: имеет ли значение размер пикселя?
Факторы при выборе цифровой камеры
(Имеет ли значение размер сенсора?)
Роджер Н.Кларк
Содержание
Все изображения, текст и данные на этом сайте защищены авторским правом.
Их нельзя использовать без письменного разрешения Роджера Н. Кларка.
Все права защищены. Если вы найдете информацию на этом сайте полезной, пожалуйста, поддержите Clarkvision и сделайте пожертвование (ссылка ниже).
Введение
На сегодняшнем рынке цифровых фотоаппаратов огромное количество моделей.
выбирать из.Я недавно столкнулся с таким решением, когда хотел купить
небольшая точка и снимай цифровой камерой. Я хотел маленький размер, высокий мегапиксель
счетчик, быстрое время отклика (малая задержка срабатывания затвора) и малошумная камера.
Я не получил того, что хотел, потому что его не существовало во время моего
покупка. После небольшого исследования я обнаружил, что никогда не получу то, что
разыскивается, если только кто-то не придумает способ нарушить законы физики.
Я надеюсь показать вам, что я имею в виду в этой статье.
Подсчет фотонов
В сенсоре современных цифровых фотоаппаратов используется устройство с зарядовой связью, CMOS. датчик или другое подобное устройство, представляющее собой массив пикселей.Каждый пиксель, представляет собой полупроводниковый материал, который поглощает фотоны и высвобождает электроны. Электроны собираются и удерживаются в так называемой потенциальной яме, или напряжение хорошо, что предотвращает уход электронов. Аналогия ведро с водой с каплями дождя, а фотоны — это дождь капли падают на ведра. Эта аналогия показана на рисунке 1а. Но аналогия с рисунком 1а неполна: нам нужна линза. На рисунке 1b показано более полная аналогия: воронки собирают капли дождя и доставляют воду в ведра.
Рис. 1. Фотонный дождь: аналогия фотонов, падающих в
ведра, в которых собираются капли дождя. Ведро большего размера собирает больше
капли. Даны два датчика с равным количеством пикселей, и каждый
с объективами с таким же соотношением диафрагмы больший сенсор собирает больше
фотоны все же имеют такое же пространственное разрешение. Объектив для
больший датчик будет иметь большее фокусное расстояние, чтобы покрыть
такое же поле зрения — это система с меньшим датчиком и линзой
также будет иметь больший диаметр апертуры, что позволит собирать больше света.Это — большая апертура, которая доставляет свет на пиксель и
более крупный пиксель просто позволяет собирать увеличенный доставляемый свет
объективом. Это показано на рисунке 1b.
В Интернете принято считать, что более крупные пиксели собирают больше света, и что камеры с большими пикселями лучше снимают при слабом освещении чувствительность. Пиксели большего размера имеют более высокую максимальную мощность сигнала на пиксель (так называемая полная мощность скважины). Но затем это все равно что сказать, что в моем ведре больше воды только потому, что оно 5-галлонное. ведро, и у вас есть только ведро на один галлон.Но действительно ли я положил вода в ведре? В одном из недавних аргументов интернет-плакат сказал, что положите вытащите наперсток рядом с бассейном и посмотрите, какой из них соберет больше капли дождя. Что ж, это очевидно, но аналогия со светом и фотоаппаратами не хватает одного: линзы или, в случае капель дождя, воронки. В Аналогия с каплями дождя хороша, потому что, как и капли дождя, свет состоит из фотоны (частицы света), которые случайным образом попадают в наши глаза и камеру линза. Чтобы проиллюстрировать эту концепцию, рассмотрим рисунок на Рисунке 1b.В Аналогию с фотонным дождем можно рассматривать как капли дождя в дождливый день или фотоны подходит к нашей камере. Оранжевые линии обозначают воронки под дождем, или объектив, фокусирующий свет на пиксель в камере. Две разные камеры показаны: один с большими пикселями, а другой с пикселями, равными половине размер. Линза собирает свет, и до тех пор, пока диаметр линзы одинаковы. Это приводит к одинаковой производительности, пока пиксель не переполняется (см. подпись к рисунку 9). Количество дождя (фотоны) в каждом ведре (пиксель) то же самое.На практике в зависимости от камеры технологии, сенсор и электроника камеры могут сделать одну камеру против другой лучший или худший исполнитель, в одном случае делая камеру с большими пикселями лучший исполнитель при слабом освещении, а в другом — камера с маленькими пикселями лучший исполнитель. В любом случае ключом к производительности при слабом освещении является собрать как можно больше света.
Рисунок 1b. Капли дождя (синие) по аналогии с фотонами, попадающими в
камера. Ведра («пиксели») наполняются водой (синие), но оранжевые
воронки собирают дождь и направляют его на ведра (пиксели).В этом
если большой конец воронки имеет одинаковый диаметр, соберите
такое же количество дождя в единицу времени (экспозиция). ЕДИНСТВЕННАЯ разница
небольшое ведро заполнится быстрее, но это не проблема
в условиях низкой освещенности. Маленькие ведра НЕ являются недостатком. Воронка
диаметр определяет, сколько дождя попадает в ведро, а не размер
ведро. То же самое и с камерами, объективами и пикселями. Угол
«a» — это угловой размер пикселя, который одинаков для обоих
большой и маленький пиксель в этом примере.В камере обе камеры будут
получать одинаковое количество света на пиксель, показывать одинаковый шум, иметь
одинаковые пиксели на объекте и одинаковая глубина резкости.
Когда изображение готово к считыванию, сигнал от пикселя подается на усилитель, а затем на аналого-цифровой (аналого-цифровой) преобразователь. В аналогии с ведром для воды стенки ведра должны быть достаточно толстыми, чтобы вода не вытекает и не попадает в соседнее ведро. Это устанавливает минимальные размеры стенок и размеры ямы, в которую может попасть вода, и в мире электроники, насколько большими должны быть стенки электронных ям, насколько они должны быть далеко друг от друга, и ограничивает размер активной области, где фотоны поглощаются с образованием электронов.Даже если в В этих областях существует один фундаментальный предел: статистики подсчета фотонов .
По аналогии с баками, наполняющими фотонный дождь, как показано на Рисунке 1, чем больше ведро, тем больше капель может быть собрано в данном количество времени. Это важно по очень фундаментальной причине: точность измеряемого сигнала прямо пропорциональна размеру сигнал. В физике счета фотонов шум в сигнале равна квадратному корню из числа фотонов.То, что мы воспринимаем как шум на изображениях с цифровой камеры, — это отношение сигнал / шум, S / N. Только при самом низком уровне сигнала шум электроники камеры снижается. стать фактором (например, полосатость низкого уровня). Пример фотонного шума и сигнал / шум:
Таблица 1
Фотоны Шум отношение сигнал / шум 9 3 3 100 10 10 900 30 30 10000 100 100 40000 200 200
Свет, который поглощается кремниевым датчиком, делает это в течение очень ограниченного времени. диапазон.Вернемся к аналогии с ведром под дождем. Более глубокое ведро не Помогите с электронными датчиками, потому что свет не проникает глубже. Итак, чтобы собрать больше света, имеет значение только площадь, поэтому на рисунках 1a и 1b глубина сегмента одинакова для маленьких и больших пикселей.
Почему это важно? Оказывается, шум в хорошем современном цифровом в камерах преобладает статистика подсчета фотонов, а не другие источники. Это подробно объясняется по адресу: Соотношение сигнал-шум изображений с цифровой камеры и сравнение с пленкой , а также Как интерпретировать обзоры датчиков цифровой камеры .Некоторые данные из статей на сайте clarkvision.com показаны здесь. для нескольких фотоаппаратов от топовых профессиональных зеркалок до профессиональные зеркалки и камеры Point and Shoot, «P&S». На рисунках 2 и 3 показано, что верхняя про модель, а также обсуждаемую здесь потребительскую камеру наведи и снимай. ограничены фотонным шумом. Фактически, все современные цифровые фотоаппараты протестированы в последние несколько лет было показано, что фотонный шум ограничен сигналом уровни выше нескольких десятков фотонов. Например, см. Анализ датчиков. и дальнейшие ссылки на: http: // www.clarkvision.com/reviews/.
Рис. 2. В Canon 1D Mark II фотонный шум ограничен при всех настройках ISO.
Только фотонный шум показывает зависимость квадратного корня от сигнала, видимую здесь.
Рисунок 3а. Шум, создаваемый потребительской камерой Canon S70, ограничен фотонным шумом.
для всех уровней выше примерно 10 фотонов. Синие точки — это измеренные значения, а красные
линия представляет собой модель с: максимальный сигнал = 8 200 фотонов (электронов), шум чтения = 4,1 электрона.
Только фотонный шум показывает зависимость квадратного корня от сигнала, видимую здесь.
Рисунок 3b. Отношение сигнал / шум маленького сенсора, пиксель 2,3 микрон
шага, потребительская камера Canon S70 наведи и снимай по сравнению с камерой от
большой сенсор, шаг пикселя 8,2 мкм, зеркальная камера Canon 1D Mark II.
Отношение сигнал / шум 18% серой карты находится на 0 ступенях, с
более светлые части изображения находятся справа, а более темные — к
слева, следуя каждой кривой. Например, Canon 1D mark II на
ISO 100 будет записывать отношение сигнал / шум около 100 на
18% серая карта, но только около 10 в тенях при -5.5 остановок (следовать
пурпурная линия).
У 1D Mark II способность собирать свет примерно в 13 раз выше, чем у маленькой камеры S70.
Нижние наклоны линий выше отношение сигнал / шум около 8
указывает на то, что шум на изображениях — это преобладающий фотонный шум, а на
при более низких коэффициентах в сигнале все больше доминирует шум чтения.
Пример большого и маленького пикселей и влияние на качество изображения проиллюстрирован на рисунках 4 и 5. НО НЕ ОБУЧАЙТЕСЬ — ПРОЧИТАЙТЕ ВЕСЬ ЭТОТ ПУНКТ! В Интернете принято считать, что датчик отвечает за повышенные светошумовые характеристики.Идея состоит в том, что чем меньше пиксели, тем меньше сенсор камеры S70 собирает меньше света. Вот типичный фотограф настройте время экспозиции, ISO и f-ratio между двумя камерами. На рис. 4а и 4б показан полный сцена, записанная двумя камерами с одинаковым ISO (ISO 400), одинаковым диафрагмой (f / 4.5) и такое же время экспозиции (1 секунда). Шаг пикселя (расстояние от одного пикселя к другому; фактическая область пикселей, чувствительная к свету, равна немного меньше) составляет 8,2 мкм для большого сенсора и камеры с большими пикселями (Canon 1D mark II) по сравнению с маленькой матрицей и камерой с маленькими пикселями (Canon S70).Обе камеры имеют практически идентичный шум чтения при ISO 400: 5,6 электронов для 1D Mark II и 4,3 электрона для S70, поэтому у S70 есть небольшое преимущество! Но, несмотря на преимущество шума чтения, большие пиксели большого камера собирает столько света на пиксель, что качество изображения намного лучше, чем камера с маленькими пикселями (рис. 5). ЗАЧЕМ? Диафрагмы у объектива разные! Свет доставляется линзой, и линза — настоящая причина того, что большие пиксели могут собирать больше света.
Рисунок 4а. Сцена полного тестирования цифровой зеркальной камеры Canon 1D Mark II: книги на книжной полке.
ISO 400, f / 4,5 1, вторая экспозиция. Объектив имеет фокусное расстояние 44 мм, f / 4,5, поэтому объектив
диаметр апертуры = 9,8 мм.
Рисунок 4b. Сцена полного тестирования камеры Canon S70 Point and Shoot: книги
на книжной полке. ISO 400, f / 4,5, выдержка 1 секунда.
Объектив имеет фокусное расстояние 13,2 мм, f / 4,5, поэтому объектив
диаметр апертуры = 2,9 мм.
Рисунок 5. Обрезка полного изображения из рисунков 4a и 4b.Урожай от
необработанные преобразованные 16-битные изображения TIF, преобразованные с помощью программного обеспечения Canon Zoombrowser
с одинаковыми (по умолчанию) настройками для обеих камер. Обе камеры записали
та же экспозиция при том же ISO и таком же соотношении f /: ISO 400, f / 4,5, 1
вторая экспозиция. Линза большего диаметра собирала больше света и подавала этот свет.
к пикселям 1D Mark II для получения более высоких
отношение сигнал-шум изображения, чем подача небольшого диаметра линзы
маленький сенсор, маленькие пиксели S70. Обе камеры
ограничены фотонным шумом, как и эти изображения.Отношение сигнал-шум
соотношение примерно в 3,5 раза выше для изображения 1D Mark II, что близко к
соотношение диаметра апертуры объектива, шага пикселя и размеров сенсора каждой камеры. ПРИЧИНА — это объектив , который дал больше света на изображение 1D Mark II,
создание лучшего имиджа. Датчик и пиксели
просто ведра для сбора света, излучаемого линзами.
Истинное выравнивание света между камерами
На этом этапе вы можете сильно запутаться.Интернет полон людей говорят, что камеры большего формата с большими пикселями более чувствительны, и изображения шоу, чтобы доказать это. Но какова настоящая причина? В таких случаях фотографы пытаются уравнять знакомые им параметры. с: время экспозиции, f-отношение и ISO, так называемый треугольник экспозиции. Но уравнивание этих трех вещей не обязательно означает Фактический свет, поступающий на датчик, выравнивается. Если свет не выравнивается, фактическая производительность датчика не может быть точно оценен.
Из трех параметров, времени экспозиции, f-ratio и ISO, только экспозиция время — это истинный параметр, который фактически выровнен с точки зрения общего количество света при установке постоянного значения между камерами. ISO не является постоянным между камерами. Например, ISO 100 на Canon Показанный здесь 1D Mark II имеет диапазон от 0 до 79 900 фотонов (фотоэлектронов), в то время как S70 имеет диапазон от 0 до 4100 фотонов. Постоянное соотношение f обеспечивает постоянную плотность света в фокальной плоскости, но НЕ такой же общий свет от предмета! Площадь диафрагмы объектива определяет общий свет, собранный от объекта.
Для выравнивания света, поступающего на датчик, и его оцифровки в равной степени необходимо сделать равными 4 параметра: 1) время выдержки, 2) диапазон фотоэлектронной оцифровки, 3) площадь апертуры объектива (линза диаметр апертуры, технически называемый входным зрачком), и количество пикселей на предмете равно. Для камер, использованных выше, Я выровнял эти три параметра и показал результаты на рисунке 6. Когда пиксели на объекте и области апертуры объектива уравновешены, это называется выравниванием Etendue.Затем для той же выдержки один раз доставляет на датчик такое же количество света. Тогда датчик характеристики можно справедливо сравнить (рисунок 6). Когда это будет сделано, изображения практически неразличимы, включая видимый шум и глубина резкости.
Рис. 6. Иллюстрация одинаковых результатов Etendue в одном и том же изображении.
качество не зависит от размера сенсора, размера пикселя, фокусного расстояния или соотношения диафрагмы!
Динамический диапазон
Большой динамический диапазон важен в фотографии во многих ситуациях.Размер пикселя в цифровых камерах также влияет на динамический диапазон. Динамический диапазон здесь определяется как максимальный сигнал, деленный на минимальный уровень шума при каждом ISO. Минимальный уровень шума представляет собой комбинацию аналого-цифрового шума считывания сенсора. ограничения преобразования и шум усилителя. Эти три параметра не могут быть легко разделены при оценке цифровых фотоаппаратов, и комбинации, как правило, называется шумом чтения (или кажущимся шумом чтения). Как вы уже могли догадаться, с более крупными пикселями, собирающими больше фотонов, эти более крупные пиксели также имеют потенциал для более высокого динамического диапазона, если электроника камеры имеет спецификации для обработки диапазона.На рисунке 7 показан измеренный динамический диапазон. с 3-х камер со значительно различающимися размерами пикселей в зависимости от ISO. Полный анализ датчиков для этих 3 камер (а также других камер) можно найти по адресу: http://www.clarkvision.com/articles/reviews/. Камеры с большими пикселями часто ограничены шумом в нисходящем направлении. электроника, например от аналого-цифровых преобразователей. Если такой шум можно было бы исключить, динамический диапазон мог бы увеличиться в камерах с большими пикселями примерно на 2 или более остановки при работе с низкими значениями ISO.Действительно, некоторые камеры от Nikon и Sony немного показывают динамический диапазон. больше, чем показано на рисунке 7. Текущие камеры с самым маленьким пикселем не собирают достаточно фотоны, чтобы получить выгоду от высокоразрядных преобразователей
Рис. 7. Динамический диапазон для 3 разных камер показан вдоль
с моделями, которые показывают, какой будет производительность, если электроника шумит
после того как датчик был нулевым.
Камеры с большими пикселями могут иметь больший динамический диапазон. Маленькая пиксельная камера
имеет очень хороший динамический диапазон при низких ISO, но этот диапазон быстро ухудшается с
увеличение ISO.Более крупные пиксели имеют больший динамический диапазон при всех ISO,
избиение камер с меньшими пикселями. Кроме того, камеры с большими пикселями обладают высокой динамикой
диапазон в более широком диапазоне ISO.
Измеренный динамический диапазон (символы) показан с моделями
ожидаемый динамический диапазон (пунктирные линии). Динамический диапазон часто ограничен
аналого-цифровым преобразователем и другой электроникой в системе,
иллюстрируется измеренными данными, падающими ниже модели при более низких значениях ISO.
Динамический диапазон для других камер можно найти на
Сводная информация о характеристиках сенсора цифровой камеры
http: // www.clarkvision.com/articles/digital.sensor.performance.summary
а также http://www.clarkvision.com/articles/reviews/.
Размеры сенсора
Размеры сенсора в камерах меньшего размера задаются странным параметром, например, 1 / 1,8 дюйма, который датируется телекамерой 1950-х годов. На мой взгляд, это просто для того, чтобы ввести потребителей в заблуждение относительно истинной природы малых датчики. Видеть Размеры сенсора http://www.dpreview.com/learn/?/Glossary/Camera_System/Sensor_Sizes_01.htm Больше подробностей.Вот несколько простых номеров перевода
Таблица 5
Размер сенсора (мм)
Тип Ширина Высота
1/6 2,40 1,80
1/4 3,60 2,70
1 / 3,6 дюйма 4,00 3,00
1 / 3,2 дюйма 4,54 3,42
1/3 дюйма 4,80 3,60
1 / 2,7 дюйма 5,37 4,03
1 / 2,5 дюйма 5,76 4,29
1 / 2,3 дюйма 6,16 4,62
1/2 дюйма 6,40 4,80
1 / 1,8 дюйма 7,18 5,32
1 / 1,7 дюйма 7,60 5,70
1 / 1,6 дюйма 8,08 6,01
2/3 "8.80 6,60
1 "12.80 9.60
4/3 "18.00 13.50
APS C 23,70 15,70 (1,6x кроп; также называется 1,8 ")
APS-H 28,7 19,1 (1,3-кратный кроп)
Пленка 35 мм 36.00 24.00
Дифракция
Дифракция также ограничивает детализацию и контраст изображения. Пятно дифракции диаметр в фокальной плоскости оптической системы пропорционален f / отношению в соответствии с формулой: Диаметр дифракционного пятна = 2 * 1,22 w * f / D = 2.44 * ш * f_ratio, где w = длина волны, f = фокусное расстояние, D = диаметр апертуры и f_ratio — f / отношение оптической системы. Размер дифракционного пятна приведен в таблице ниже:
Таблица 6
================================================
красный = зеленый = синий =
0,6 0,53 0,47
микрон микрон микрон
================================================
Диаметр дифракционного пятна f / ratio в микронах
================================================
2 2.9 2,6 2,3
2,8 4,1 3,6 3,2
4 5,9 5,2 4,6
5,6 8,2 7,2 6,4
8 11,7 10,3 9,2
11 16,1 14,2 12,6
16 23,4 20,7 18,3
19 27,8 24,6 21,8
22 32,2 28,5 25,2
32 46,8 41,4 36,7
45 65,9 58,2 51,6
64 93.7 82,8 73,4
================================================
Длины волн — это приблизительные центры красного, зеленого и синего цветов. фильтры в цифровых фотоаппаратах. Обратите внимание, что размер дифракции больше для более красные цвета.
Сравните дифракционные диаметры с размерами пикселей в цифровых камерах. Обсуждаемый выше Canon 1D Mark II имеет расстояние между пикселями 8,2 микрон и с фильтром размытия, который используется на большинстве камер с сенсором Байера, разрешение возможно на 30% хуже, значит, около 11 мкм.Примерно на f / 8 пиксели камеры + фильтр размытия соответствует размытию из-за дифракции. Но такая же торговая точка в небольших сенсорах Canon S60 с 2,7 микронами расстояние между пикселями, происходит при f / 2.8. Этот размер дифракционного пятна по сравнению с пикселем размер торговой точки происходит при 20% ухудшении высокочастотного контраста (80% MTF, функция передачи модуляции). Снижение контрастности составляет более подробно показано на рисунке 8. Дифракция в этой точке начинается чтобы ограничить разрешение, но это не серьезно. Но используя отверстия меньшего размера чем эта торговая точка означает, что разрешение изображения становится более ограниченным по дифракции, а не по датчику.Если вы не работаете с очень быстрым, резким, линзы постоянно, вам нужны пиксели большего размера, чтобы поддерживать высокий контраст в деталях изображения от пикселя к пикселю. Таким образом, камеры с большей датчик, содержащий больше пикселей, имеет преимущество перед ограничением путем дифракции. Если вы уменьшите размер пикселя, вы, конечно, не потеряете разрешение на изображении , просто контраст между пикселями в порядке подробностей будет меньше.
Рис. 8. Дифракция влияет на детализацию изображения за счет уменьшения контрастности.Технический термин для уменьшения контрастности называется
Функция передачи модуляции (MTF) и описывает контраст
камера работает в зависимости от расстояния между линиями (так называемый
пространственная частота).
Здесь пространственная частота выражается через интервал между пикселями.
По мере увеличения числа диафрагм (например, от f / 4 до f / 8) дифракционное пятно становится больше, и
мелкие детали изображения становятся менее контрастными.
Красная, зеленая и синяя линии показывают дифракционные эффекты для красного,
длина волны зеленого и синего света для соотношений f / 1, 2, 4 и 8.
Расширение
Чтобы получить заданный размер печати, изображение должно быть увеличено от маленькое изображение в фокальной плоскости камеры. Например, скажем, вы хотите для печати 8 x 10 дюймов (203 x 254 мм). Если ваш датчик похож на Canon S60 при 7,18 x 5,32 мм, потребуется увеличение примерно в 36 раз. Такое резкое увеличение усилит любые дефекты линз и вибрация во время экспонирования. Датчик большего размера, чем у 1D Mark II, с его 28.Матрица 7 x 19,1 мм, требуется только 10,6-кратное увеличение ( Печать размером 8 x 12 дюймов), или в 3 раза меньшее увеличение дефектов линз и вибрация, чем у S60.
Традиционно в фотографии большие форматы
получили более качественные изображения на окончательном отпечатке. Главный фактор в имидже
качество — фактор увеличения. Большие форматы (например, пленка 8×10 или 4×5)
и теперь широкоформатные цифровые сканирующие задники) производят впечатляющие большие
отпечатки, которые не могут быть сопоставлены с меньшими (например, 35 мм и меньше) форматами.Эти факторы масштабируются до еще меньших форматов текущего наведи и снимай.
цифровые фотоаппараты с малым сенсором.
Миф о f / соотношении
В фотографии принято считать, что экспозиция не меняется между камеры разного размера при работе с одинаковым соотношением диафрагмы. Например, Правило солнечного f / 16 гласит, что хорошая экспозиция для дневного света составляет 1 / ISO. при f / 16. Таким образом, для пленки ISO 100 вы используете выдержку 1/100 секунды на камера 8×10 при f / 16, камера 4×5 при f / 16, камера 35 мм при f / 16, цифровая камера APS-C с диафрагмой f / 16, вплоть до мельчайших деталей, и снимайте камера на f / 16 (при условии, что маленькая камера переходит на f / 16).Миф что каждая камера будет обеспечивать одинаковое соотношение сигнал / шум до тех пор, пока поскольку используется то же время экспозиции и объектив с таким же соотношением сторон и f /, от камеры с самый маленький сенсор, к камере с большим сенсором.
Концепция постоянной экспозиции для заданного f / отношения приводит людей к Думаю, камеры легко масштабируются и при этом дают то же изображение. Но есть заблуждение в этой идее, и это пространственное разрешение по предмету. Камера меньшего размера, даже с таким же соотношением диафрагмы, имеет меньший объектив, который собирает меньшее количество фотонов в единицу времени.Меньшая камера получает такое же время экспозиции, потому что ОБЛАСТЬ ЕДИНИЦЫ в фокальной плоскости представляет собой больший угловой размер объекта. Экспозиция — это не так же, как свет собрался. Экспозиция — это относительная мера того, насколько пиксель может быть заполнен. Более крупный пиксель может собирать больше света перед он называется наполовину полным (представьте себе большие и маленькие ведра с водой: маленькое ведро, заполненное наполовину, вмещает меньше воды, чем большое ведро наполовину заполнен).
Скорость прихода фотонов в фокальную плоскость линзы
на единицу площади в единицу времени пропорциональна квадрату
f-коэффициент.Следствие: если вы сохраните постоянное соотношение f / и измените
фокусное расстояние, то количество фотонов на единицу площади в фокальной плоскости равно
постоянное, но пространственное разрешение меняется.
Итак, как это применимо к созданию камер меньшего размера?
Проблема в том, что если вы уменьшите масштаб камеры, скажем, в 2 раза по линейному размеру, диафрагма уменьшается в 2 раза в диаметре, фокусное расстояние уменьшается в 2 раза (до дают такое же поле зрения), размер сенсора уменьшается в 2 раза (линейно или В 4 раза больше площади), а размер пикселя уменьшается в 2 раза (линейно или в 4 раза больше площади, чтобы дать такое же пространственное разрешение по предмету). Диафрагма имеет собрано только 1/4 количества фотонов. Если оставить тот же датчик, тогда каждый пиксель будет собирать одинаковое количество фотонов, потому что каждый пиксель теперь видит большую угловую область (в 4 раза больше). Но мы хотим такое же разрешение, поэтому пиксели в 2 раза меньше (площадь в 4 раза меньше). Каждый пиксель меньшего размера собирает на 1/4 меньше фотонов, так как их площадь равна делится на 4, чтобы сохранить постоянное пространственное разрешение, и — фундаментальное значение. Причина более низкого собираемого света связана с меньшей линзой, потому что он собирает и доставляет меньшее количество фотонов к пикселям .Причина НЕ из-за меньшего размера пикселей.
Другой способ взглянуть на проблему — диафрагма собирает свет, фокусное расстояние рассеивает свет, а пиксели — это ведра, которые собрать свет в фокальной плоскости. НО ОБЩЕЕ КОЛИЧЕСТВО ФОТОНЫ ДОСТАВКА НА ФОКУСНУЮ ПЛОСКОСТЬ ЗАВИСИТ ТОЛЬКО ОТ ОТВЕРСТИЯ (без учета потерь передачи оптики). Таким образом, фотоны доставляется в пиксель для данного разрешения по теме, как квадрат диафрагмы (и размер камеры, когда объектив масштабируется с размер формата камеры и f-соотношение сохраняется)! Уменьшение камеры в 2 раза означает в 4 раза меньше фотонов на пиксель, если вы хотите сохранить поле вид, f-соотношение и количество мегапикселей!
Именно это мы и наблюдаем с небольшими камерами: их датчики меньшего размера имеют меньшую полную емкость лунки, поэтому они заполняются для заданного времени экспозиции с меньшим количеством фотонов который доставляется меньшей линзой.Это, в свою очередь, означает более высокий уровень шума, потому что меньше фотоны. Но это масштабирование ВЕРНО ТОЛЬКО, если мы уменьшаем масштаб линзы с меньшим датчиком. Но ЕСЛИ мы сохраняем площадь диафрагмы объектива то же самое, то мы даем такое же количество света при той же экспозиции время.
Пример: полнокадровая 20-мегапиксельная камера и 2-кратный датчик кадрирования 20 мегапикселей. камера. Если вы используете объектив 50 мм f / 4 на полнокадровой камере (FF), то для получить такой же свет, такой же кажущийся шум, те же пиксели на объекте и с той же глубиной резкости, мы бы использовали объектив с фокусным расстоянием 25 мм и f / 2 на кадрировать камеру.В обоих случаях диаметр апертуры линзы составляет 12,5 мм.
Давайте расширим это до светосильных линз с пониженным освещением. Ставим объектив 50 мм f / 1,4 на полнокадровой камере. Чтобы получить равный свет с камерой кадрирования, понадобится объектив 25 мм f / 0,7. Но такой линзы не существует! Таким образом, камера большего формата позволяет камере использовать большую апертуру. объективы, которых нет для камер меньшего формата. Это также означает, что меньшая камера не будет намного меньше, из-за объектива и может быть дороже из-за технических характеристик объектива.
Для камер с ограничением фотонного шума и объективом с постоянным соотношением f, отношение сигнал / шум, достижимое на изображении при постоянном времени экспозиции является квадратным корнем из числа собранных фотонов, поэтому отношение сигнал-шум соотношение масштабируется линейно с размером пикселя камеры (опять же для постоянного линзы с соотношением f). Эта концепция проиллюстрирована на Рисунке 5 выше: камера с небольшой матрицей и меньшим объективом давала более шумное изображение, чем камера с большим сенсором и большим объективом, несмотря на то, что f / соотношение, экспозиция и ISO одинаковы для двух камер (что, как мы видели, не означает равный свет).См. Также: Миф о диафрагме и цифровые фотоаппараты. http://www.clarkvision.com/articles/f-ratio_myth
Посетите эту веб-страницу для получения дополнительной информации по этому вопросу: http://www.stanmooreastro.com/f_ratio_myth.htm
, а также
Характеристики лучших цифровых фотоаппаратов и объективов
для ночного пейзажа и астрофотографии.
Миф о глубине резкости
После понимания концепций мифа о f / ratio,
— еще одно важное значение масштабирования датчиков.Учитывая одинаковый фотонный шум, время экспозиции, размер увеличения,
и количество пикселей, дающих такое же пространственное разрешение (т. е.
одинаковое общее качество изображения), цифровые камеры разного размера
датчики будут создавать изображения с одинаковой глубиной резкости. (Этот
предполагает аналогичные относительные характеристики электроники камеры,
фильтры размытия и линзы.) Камера большего формата будет использовать
более высокое соотношение f / и ISO, равное отношению размеров сенсора к
добиться этого равенства. Если сцена достаточно статична,
можно использовать время экспозиции, тогда камера большего формата будет
создавать изображения с той же глубиной резкости, что и камера меньшего формата,
но будет собирать больше фотонов и производить более высокое отношение сигнал / шум
изображений.Другой способ взглянуть на проблему — использовать больший формат.
камера могла бы использовать еще меньшую диафрагму и более длительную выдержку
добиться аналогичного отношения сигнал / шум изображения с большей глубиной
поле, чем камера меньшего формата. Таким образом, камера большего формата
имеет преимущество в создании равных или лучших изображений с равными или
лучшая глубина резкости, чем у камер меньшего формата.
Подробности этих концепций обсуждаются здесь: Миф о глубине резкости и цифровые фотоаппараты
http://www.clarkvision.com/articles/dof_myth
пикселей разного размера в сенсоре одинакового размера
Мы рассматривали камеры с одинаковым количеством пикселей и разными размер сенсоров и показано, что камеры с большими сенсорами и большими пикселями собирать больше света при том же объективе f / ratio и области вид, таким образом, лучше при слабом освещении и при высоких значениях ISO.Но теперь у нас также есть выбор из разных камер одинакового размера. сенсоры, но с разными по размеру и количеству пикселей. Каковы последствия этой ситуации?
По всей видимости, в сети идут жаркие споры по этому поводу с страстные аргументы в пользу меньших и больших пикселей в сенсоре того же размера. Многие использовали данные в этой статье и в моем Сводная информация о характеристиках сенсора цифровой камеры статья, чтобы возразить обеим сторонам. Как и многие другие позиции о крайностях, некоторые из этих аргументов игнорировать ключевые факторы.
Аргумент в пользу меньших пикселей звучит так. Меньшие пиксели в том же датчик размера регистрирует более мелкие детали. Вы всегда можете усреднить пиксели, чтобы вернуться для эффективного увеличения пикселей. В частях изображения с высоким уровнем сигнала этот аргумент правильно, за исключением одного фактора: меньшие пиксели имеют более низкий динамический диапазон (см. рисунок 7 выше). Если ваш меньший пиксель выделяет блики, у вас потеряли все детали изображения. Но если не засветить блики, поменьше пиксели лучше, когда у вас много света.Шум на изображении будет преобладать фотонный шум (лучший из возможных), и вы можете программное обеспечение торговли шумом для разрешения. А усредняя пиксели, можно улучшить динамический диапазон. Так что у камер с более высоким мегапикселем есть свои достоинства.
В идеальной камере единственный шум, который вы могли бы записать, был бы от фотоны (конечный физический предел). Но у камер есть другие источники шума (видеть Сводная информация о характеристиках сенсора цифровой камеры ), включая шум чтения, шум электроники, шум от темнового тока (тепловой шум), и фиксированный узор или полосовой шум.Это меняет уравнение для пикселей, производительности при слабом освещении, и фотография с высоким ISO.
Когда уровень освещенности падает, будь то в тени дневной сцены, в помещении фотосъемка при слабом освещении, до ночной фотосъемки, фотоаппараты должны обойтись меньшим количеством света для изображения. Это означает, что электроника шум в камере становится большей частью общего шума мы воспринимаем в образах. И именно этот факт может ограничить идею делать все меньше и меньше пикселей. Этот шум электроники тоже фактор уменьшения динамического диапазона пикселей меньшего размера.Так что с увеличенным кажущимся шумом, меньшим динамическим диапазоном и тем фактом, что линзы не могут передать все более мелкие детали, потому что они становятся дифракционно ограниченными, качество изображения не может увеличиваться вечно, как размер пикселя уменьшается. Еще одним фактором, влияющим на маленькие пиксели, является длина поглощения. фотонов в кремниевом сенсоре: от 1 микрона для синего света до более 7 микрон для красного света (см. Таблицу 1B при Сводка характеристик датчика цифровой камеры ). Длина поглощения также ограничивает детализацию изображения, особенно в сторону красных цветов.Так что есть пагубные эффекты пикселей, которые слишком малы.
Теперь рассмотрим большие пиксели. Максимальное соотношение сигнал / шум соотношение, высокий динамический диапазон и высокая производительность ISO будут одним большим пиксель. Очевидно, что камера с одним большим пикселем не очень хороший имидж. Очевидно, что для изображения необходимы некоторые пиксели, и последние полнокадровые камеры с разрешением 20+ мегапикселей обеспечивают выдающееся изображение деталь. Слишком мало пикселей плохо влияет на качество изображения, а слишком много пиксели плохо влияют на качество изображения.Так что должен быть оптимум.
Моя модель Apparent Image Quality (AIQ) , более подробно описанная в Сводная информация о характеристиках сенсора цифровой камеры показывает оптимальный размер пикселя (рисунок 9). Для камер с дифракцией ограниченные объективы, работающие на f / 8, модель предсказывает максимальный AIQ около пикселей 5 микрон. Многие камеры APS-C работают около этого уровня. На момент написания статьи полный кадр Цифровые камеры 35 мм выходят с разрешением от 36 до 50 мегапикселей с разрешением от 4 до 5 микрон пикселей с впечатляющим качеством изображения, но только при использовании с отличные линзы.
Рисунок 9. Видимое качество изображения, из Сводная информация о характеристиках сенсора цифровой камеры .
Модели точно предсказывают
производительность для современных фотоаппаратов (в пределах 10% для
большие пиксели и 20% для маленьких пикселей). Старые камеры и датчики ниже
модель, например обычно из-за низкого коэффициента заполнения. Высший квант
датчики эффективности (QE), чем модель (45%), построенная над моделью (на
коэффициент квадратного корня 2, в 1,41 раза больше AIQ для датчика QE ~ 100%).
Сплошные цветные линии обозначают постоянный размер сенсора в мегапикселях.Пунктирная
цветные линии обозначают датчики постоянного формата. «Полнокадровый»
Размер сенсора такой же, как у 35-мм пленки. При движении влево по
линия постоянного формата, AIQ сначала увеличивается, пока дифракция не начнет уменьшаться.
вступают в силу, затем AIQ уменьшается. Дифракция на f / 8 используется для полного
Рамка, датчики кадрирования 1.3x и 1.6x, а также f / 7 для датчика 4/3
(длинные пунктирные линии), f / 4 для полнокадрового сенсора и 2/3 «малоформатного сенсора,
и f / 2,8 для самого маленького показанного датчика, 1 / 1,8 дюйма (короткие пунктирные линии).В
меньшие значения f / отношения необходимы по мере уменьшения размера сенсора, чтобы
подогнать модель под наблюдаемые данные. Это указывает на камеры меньшего формата.
должны иметь линзы очень высокого качества, чтобы обеспечивать производительность на
высокие мегапиксели. Дифракция ограничивает количество эффективных мегапикселей. Когда пиксели
становятся очень маленькими, они удерживают так мало электронов, что динамический диапазон
страдает, и это приводит к снижению AIQ при размерах пикселей менее 2 микрон.
шаг пикселя. См. Обсуждение дифракции выше,
далее ограничить AIQ.Например, AIQ для графиков Canon 7D выше
модельный ряд для его датчика кропа 1.6x. Но этот AIQ будет только
Реализация объектива, используемого с камерой, ограничена дифракцией ниже f / 8.
Одинаковый объектив, другой датчик и размер пикселя
Теперь давайте рассмотрим распространенный пример использования одного и того же объектива на разных камерах. так что размер сенсора и размеры пикселей разные. Количество свет, улавливаемый пикселем, зависит от объектива, обеспечивающего свет.У фотоаппаратов и объективов есть дополнительный фактор: площадь пиксель покрывает. Если мы выровняем область и, следовательно, пиксели на объекте, затем, используя тот же объектив, такое же соотношение f /, такое же время экспозиции, свет на пиксель то же самое. Мы можем выровнять пиксельную область между камерой с большими пикселями и один с маленькими пикселями, просто добавляя пиксели, или доли пикселей вместе. На рисунке 10 показан такой пример.
Объектив излучает свет. Пиксель — это просто ведро. Ниже в На рисунке 10 представлено сравнение изображений, сделанных с полным кадром и 1.6x урожай камеры. Если бы мы поверили интернет-мифу о том, что более крупные датчики — больше чувствительной, можно было бы ожидать разницу в уровне шума между полнокадровым и кадрировать камеры как квадратный корень из областей пикселей, или sqrt (2,59) = 1.6, что сделало бы изображение кадрированной камеры заметно более шумным. Четко, это не тот случай на рисунке 10. Веб-сайты, показывающие различия между кадрированными и полнокадровыми камерами обычно меняют объектив площадь диафрагмы между камерами, таким образом, количество собираемого света.
Рисунок 10.Сравнение изображений, сделанных с полным кадром и кадрированием в 1,6 раза камеры. Соотношение площадей пикселей — 2,59. Сосредоточившись на предмете, не пиксель (в конце концов, что является предметом на фото: предметом, или пиксель?), я выбрал меньшие пиксели камеры кадрирования 1,6x к тем же пикселям на объекте в полном кадре. Путем повторной выборки в тех же пикселей на объекте, мы видим, что отношение сигнал / шум (S / N) по существу то же самое в однородных областях (соответствие лучше, чем 1 процент), но меньшие пиксели камеры кадрирования фактически записывают более тусклые звезды и больше деталей даже после передискретизации.
Рисунок 11 — еще один пример использования 7D при ISO 6400, который дает довольно шумное изображение. Сравните это с 5DII с его большими пикселями. создает изображение с менее заметным шумом, но с меньшим пространственным разрешением, а затем сравните с 7D с пикселями, масштабированными, а затем усредненными 2×2: довольно чистое изображение по сравнению. Увеличение в 1,35 раза не изменить шум, и среднее значение 2×2 пикселя просто заставит Etendue сделать больше и равно изображению 5D Mark II. Обратите внимание, что ВСЕГО свет от объекта такой же для исходного изображения 7D и масштабированное усредненное изображение размером 2×2 пикселя.Шум на 7D передискретизированном изображении меньше, потому что тем больше света на пиксель в передискретизированном изображении. Шум также проявляется меньше в изображение 7D с измененным размером, чем изображение 5D Mark II. Это потому что датчик 7D имеет немного большую чувствительность системы, чем более старый поколения 5D Mark II, поэтому 7D собрал немного больше света, сделав изображение с более высоким отношением сигнал / шум. Это доказывает, что 7D на самом деле лучшая камера для слабого освещения, чем 5D Mark II.
Рис. 11. Сравнение средних значений 7D, 5DII и масштабированных 2×2 пикселей.
изображение 7D при ISO 6400.Среднее значение 2×2 пикселя было выполнено в ImagesPlus.
Это изменение масштаба и усреднение пикселей делают изображение Луны 7D того же размера, что и изображение.
Луна на снимке 5D Mark II. Если бы две камеры имели одинаковую систему
чувствительности, шум был бы идентичным. Масштабированное изображение 7D
справа на самом деле показывает меньше шума, чем на изображении 5D Mark II
потому что 7D имеет немного большую чувствительность системы.
Никакое программное обеспечение для повышения резкости и шумоподавления не использовалось ни для одного изображения.
Еще один фактор, который следует учитывать при выборе камер, — это возможность поменять линзы.Очень светосильные широкоугольные объективы доступны только в единое фокусное расстояние (широко известное как фиксированные линзы) всего с несколькими редкие исключения. Большинство зум-объективов не такие быстрые и дают меньше качественные изображения (есть исключения). Обычно это означает зеркальную или беззеркальную камеру со сменными объективами. Обратите внимание, что слишком много использования Live View, будь то беззеркальная камера или зеркальная камера, нагревает датчик увеличивает шум темнового тока, и это может сделать такие сравнения разные. После того как датчик нагреется, может потребоваться полчаса или больше, чтобы остыть до температуры окружающей среды.
Еще один фактор, который может повлиять на производительность, — это структурный шум или полосатость.
У старых моделей камер может быть больше проблем с полосами, чем у новых.
и масштабирование пикселей ограничивает эффективность сравнений
как на рисунках 10 и 11. Но с современным низким уровнем шума, низким
группируя камеры, можно обменять пространственную детализацию на шум и размер пикселя
меньше беспокоит. В условиях низкой освещенности преобладает объектив
сбор света, а не размер пикселя и размер сенсора.
Обсуждение и выводы
В этой статье я продемонстрировал, что диафрагма объектива, собирающая в современных камерах наиболее важным фактором является свет, а не сенсор. размер или размер пикселя.Это верно для многих камер, размеров сенсоров и размеры пикселей. Более крупный датчик позволяет использовать более крупные линзы для собрать больше света. Но если объектив с таким же диаметром диафрагмы можно использовать на камере меньшего формата изображения могут быть практически идентичными. Эта концепция более подробно рассматривается в части 2.
Но по мере того, как вы нажимаете крайности, либо очень маленькие пиксели, менее чем пару микрон, в игру вступают и другие факторы, в том числе дифракция что снижает контрастность и детализацию, длины поглощения фотонов в кремний, а динамический диапазон пикселей может ограничить возможность получения производительности можно получить с более крупными системами.Например, если вы используете светосильный объектив, например, 50 мм f / 1,4 на полнокадровом сенсоре, уменьшив сенсор в 6 раз потребуется фокусное расстояние в 6 раз меньше (8,3 мм), если кто-то хочет сохранять то же поле зрения. При таком же диаметре апертуры (35,7 мм) для сохранения светосбора, для этого потребуется объектив с диафрагмой f / 0,23 (8,3 / 35,7)! Таких линз не существует. Требования к поддержанию производительность системы большего формата в камере меньшего формата увеличиваются по мере уменьшения формата, и в какой-то момент становится невозможным или непомерно дорого.Обычная причина, по которой люди покупают меньший формат камеры имеют меньшую стоимость, меньший вес и меньший объем; производительность запоздалая мысль.
Для умеренных систем, например Кроп в 1,6 раза по сравнению с полнокадровыми зеркальными фотокамерами. концепции Etendue, представленные здесь и в других местах на этом веб-сайте, во многих случаях можно получить одинаковую производительность между двумя системами. Это предполагает, что можно поддерживать диаметр апертуры объектива на меньшая система.
В современных сенсорах маленькие пиксели имеют меньшее значение, чем большие: с низким шум (шум чтения и шум электроники камеры), доступный во многих сегодняшние камеры (примерно 2014+) можно синтезировать большие пиксели из сенсор с маленькими пикселями, обеспечивающий аналогичную (или даже лучшую) производительность.Так было не всегда. Старые цифровые камеры имели высокий уровень шума при чтении и высокий уровень шума электроники камеры. Сложение пикселей вместе означало добавление значительный шум, ограничивающий эффективность синтеза больших пикселей. В ближайшее время шум чтения + шум электроники нисходящей камеры должно быть значительно ниже 1 электрона (примерно в 2014 г. От 1 до 3 электронов в некоторых камерах). Ниже одного электрона можно довольно полагаться на постобработку, чтобы торговать шумом с пространственным разрешением при самый низкий уровень освещенности.Такое бинирование постобработки выполняется сегодня (2015+), но с небольшим добавлением шума при добавлении пикселей вместе (рисунки 10, 11).
Мы наблюдаем разницу в качестве изображения в изображениях, выводимых из камера с большими по сравнению с маленькими пикселями. Но такая разница может быть эффективно смягчается при постобработке, как показано на рисунках 10 и 11.
При выборе между камерами с матрицей одинакового размера, но разными количество пикселей, времена изменились. Десять лет назад я бы выбрал камера с большими пикселями (и меньшим количеством пикселей), чтобы получить лучшая производительность при высоких ISO и при слабом освещении.Сегодня я бы выбрал более высокий мегапиксель (следовательно, меньшие пиксели). Современные камеры с высоким количество мегапикселей, низкий уровень шума чтения и низкий уровень шума электроники позволяют торговое разрешение и шум. Если нужен разумный динамический диапазон в камере с высоким разрешением пиксели должны быть достаточно большими, чтобы удерживают достаточно фотоэлектронов, чтобы обеспечить динамический диапазон. В настоящее время (около 2016 г.), это не намного меньше, чем расстояние между пикселями в 4 микрона. Например, 50-мегапиксельный Canon 5DS (r) соответствует этим критериям, а Nikon D800 и D810 находятся в одной лиге.
Пиксели меньше 4 микрон часто может быть ограничено (более низкий контраст и потеря мелких деталей) дифракцией. Но теперь, когда в современных камерах системный шум низкий, пиксели складываются вместе. синтезировать изображение с сенсора с более крупными пикселями, дифракция ограничена меньшие пиксели не вызывают беспокойства.
Однако обратите внимание, что Photoshop (от CS6 до CC) в настоящее время не имеет пикселей инструменты для мусора. Если вы хотите выполнить биннинг пикселей, посмотрите на астрономическое изображение. программы обработки.
Смотрите также: Характеристики лучших цифровых фотоаппаратов и объективов и
Фильм против цифрового резюме.
Также смотрите статью Динамический диапазон изображения который показывает, что в реальных сценах может быть более 10 стоп-кадров
динамический диапазон (более 1000 раз).
Тогда ознакомьтесь со статьей о Соотношение сигнал-шум цифровой камеры
изображения и сравнение с фильмом.
Если вы найдете информацию на этом сайте полезной, пожалуйста, поддержите Clarkvision и сделайте пожертвование (ссылка ниже).
Примечания и ссылки
На этой странице показаны изображения и графики шума некоторых цифровых фотоаппаратов. по сравнению с зеркалкой. Результаты аналогичны результатам исследования, представленного на этой странице. http://www.dpreview.com/reviews/sonydscf828/page14.asp
DN — это «номер данных». Это номер в файле для каждого пиксель. Я цитирую уровень яркости (хотя красный, зеленый и синий в приведенных мной случаях почти одинаковы).
16-битное целое число со знаком: от -32768 до +32767
16-разрядное целое число без знака: от 0 до 65535
Photoshop использует целые числа со знаком, но 16-битный TIFF целое число без знака (правильно читается ImagesPlus).
Основная ошибка при измерении фотонного сигнала — это квадрат корень из числа подсчитанных фотонов, статистика Пуассона. Максимальное количество фотонов, которое можно подсчитать с помощью сенсора — максимальное количество электронов, которое может удерживаться в колодце. На фотон приходится один электрон. Если заполнить пиксель ну с 40000 электронов, то шум в сигнале корень квадратный 40,000. Итак, каким бы ни был сигнал, ошибка (шум) — это квадратный корень из числа электронов (фотонов). Чем больше подсчитано фотонов, тем выше отношение сигнал-шум.Отношение сигнал / шум = # фотонов / квадратный корень (# фотонов) = квадратный корень (# фотонов) В тени на изображении может быть всего несколько сотен фотонов, поэтому шум — это квадратный корень из этих нескольких сотен.
Распределение Пуассона http://mathworld.wolfram.com/PoissonDistribution.html
Отношение сигнал / шум при цифровой обработке изображений: http://www.photomet.com/library_enc_signal.shtml
Фотонный шум: http://www.roperscientific.de/tnoisesrc.html
Отчет о камере Canon Powershot S60.http://www.canon.com/camera-museum/tech/report/200408/report.html
Объяснение коэффициента заполнения CMOS: N-Well Pixel® с высоким коэффициентом заполнения FillFactory (патент США 6225670) http://www.fillfactory.com/htm/technology/htm/high_fill.htm
Когда цифровым камерам нужны большие области пикселей http://www.kodak.com/global/plugins/acrobat/en/digital/ccd/papersArticles/interlineLargePixels.pdf
Два класса цифровых фотоаппаратов http://www.kenrockwell.com/tech/2dig.htm
Подробнее о мифе о f / соотношении: http: // home.earthlink.net/~stanleymm/f_ratio_myth.htm
ПРИМЕЧАНИЕ. Это первая часть серии статей. Часть 2 находится по адресу:
Цифровые камеры: Есть ли Размер пикселя имеет значение? Часть 2: Примеры изображений с использованием другого пикселя Размеры.
http://www.clarkvision.