
Строение фотоаппарата: 503 Service Unavailable
Фотоаппарато-строение — презентация онлайн
Похожие презентации:
Классический фотоальбом
Увековечение имени А. С. Пушкина в названиях городов, улиц, площадей, скверов
Проект по технологии. Подставка под горячее
Гармоничные сочетания цветов
Иероним Босх
Внушение народу определённых чувств и мыслей средствами искусства
Кинофильмы и мультфильмы о Снегурочке
Стиль рококо в архитектуре
История русского кинематографа
Основы композиции. Правила и ошибки композиции
1. Фотоаппарато-строение
ФОТОАППАРАТОСТРОЕНИЕ2. Первым похожим на фотоаппарат устройством, ещё в 3 веке да нашей эры, был аппарат-обскура. Камера представляла из себя ящик или
ПЕРВЫМ ПОХОЖИМ НА ФОТОАППАРАТ УСТРОЙСТВОМ, ЕЩЁ В 3 ВЕКЕДА НАШЕЙ ЭРЫ, БЫЛ АППАРАТ-ОБСКУРА. КАМЕРА ПРЕДСТАВЛЯЛА
ИЗ СЕБЯ ЯЩИК ИЛИ ТЕМНУЮ КОМНАТУ.
Ее работу знал даже Аристотель за 350 лет до нашей эры. Принцип ее действия
описывал Леонардо да Винчи.
 Евклид предложил сделать на стенке отверстие и
Евклид предложил сделать на стенке отверстие ипроецировать изображение, с помощью дополнительных инструментов, на
противоположную стену.
Для того, чтобы сфотографиться на первый
фотоаппарат приходилось сидеть неподвижно около 8
часов.
С 1800 годов развитие фотоаппарата
набрало обороты. Сначала в камеру
добавили призму, затем, для
улучшения изображения, в камере
начинают использовать менисковую
линзу с диафрагмой. Через пару лет,
в 1812 году, Жозеф Нисефор Ньепс
изобрел камеру-обскуру с линзой и
раздвижной трубкой. Это
изобретение и стало первым
похожим на современный
фотоаппарат прибором. Первые
снимки на этой камере содержали
изображение окна квартиры
изобретателя, и он сумел
зафиксировать их на бумаге.
Через год Карл Гаусс создал первый объектив. Развитие фотоаппарата, как
прибора, шло очень успешно, но проблема заключалась в том, чтобы
изображение зафиксировать на каком-либо материале на долгое время.
 В
В1820 году Ньепс применил для фиксации изображения стекло и
асфальтовый лак. Затем он использовал цинковую пластину с асфальтным
лаком и, спустя несколько лет, он сумел сделать такой снимок,
изображение на котором существует до сих пор.
Значительным шагом в фотоиндустрии стал
массовый выпуск фотоаппаратов. Уже в 1914 г. в
Германии О. Барнак создал малоформатную и
доступную по цене фотокамеру, заправляющуюся
пленкой, которая произвела революцию в
фотографии.
Следующем революционным шагом стал Polaroid в 1963-м году. В
Polaroid печать фотографий происходила мгновенно. Ранее, даже у
самого лучшего фотографа, на проявку пленки и печать
фотографий уходило приличное количество времени. Polaroid
упростил этот процесс насколько это возможно.
Фотоиндустрия уверенным шагом шла к более совершенным
средствам фотосъемки.
8. основатель компании Polaroid
ОСНОВАТЕЛЬ КОМПАНИИPOLAROID
Эдвин Лэнд, основатель компании Polaroid, родился в 1909 году в городке
Бриджпорт (Коннектикут, США) в семье одесситов, которые эмигрировали
в Америку в конце 19-го века — в неспокойное время для живших в России
евреев.
 Дед Эдвина, Авраам Соломонович, начал в Америке собственный
Дед Эдвина, Авраам Соломонович, начал в Америке собственныйбизнес по скупке и переработке металлолома и преуспел в этом. Позже этот
бизнес продолжил отец Эдвина.
9. polaroid
POLAROIDПолароид — это действительно целая эпоха.
Тьма фотографов кормились на
моментальных фотографиях в туристических
местах. Изобретение было великолепным!
И прогресс не заставил себя долго ждать. ». С 1970 года
фотоаппараты совершенствуются, с помощью электроники и в
1988 году компания «Fujifilm» выпускает первую цифровую
фотокамеру.
Человечество увидело первую цифровую фотографию. На ней было
изображено звездное небо. В 1980-м начался массовый выпуск цифровых
видеокамер. А цифровые фотоаппараты, в свою очередь, почти полностью
вытеснили не только своих пленочных собратьев, но и нашумевшие
Polaroid-ы.
12. Первые в мире снимки
ПЕРВЫЕ В МИРЕ СНИМКИСнимок Ньепса
1826 г. Закрепил «Солнечный рисунок»
Снимок Тальбота
1835 г.
 -зафиксировал солнечный луч
-зафиксировал солнечный луч13. Первые в мире снимки
ПЕРВЫЕ В МИРЕ СНИМКИСнимок Фрицше
Май 1839 г.-выполнил снимок по
способу Тальбота.
Снимок Дагера
1837 г.-открыл надежный способ
проявления и закрепления скрытого
изображения на чувствительной к
свету серебряной пластине.
14. Устройство фотоаппарата
УСТРОЙСТВО ФОТОАППАРАТА15. корпус
КОРПУССтенки корпуса образуют светонепроницаемую камеру,
в передней части которой установлен объектив, а в задней –
кассеты со светочувствительным материалом
16. Объектив
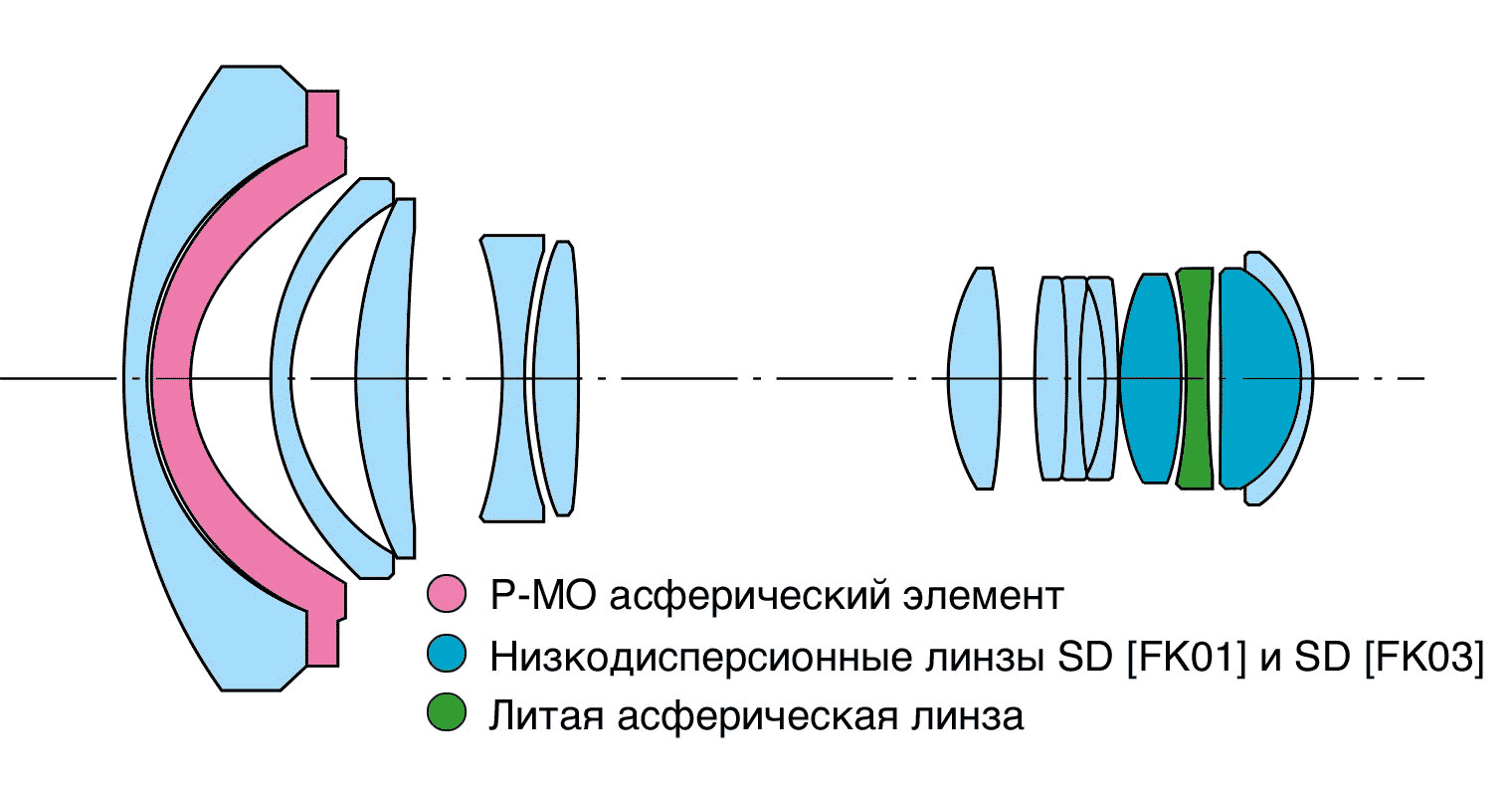
ОБЪЕКТИВОбъектив — система оптических линз, заключенная в
специальную оправу
Основные характеристики объектива:
1. Главное фокусное расстояние (f ´) расстояние от задней оптической плоскости H´
объектива до плоскости Р, где фокусируются лучи
света, входящие в объектив параллельным пучком
2. Относительное отверстие –
отношение диаметра светового отверстия объектива
к величине главного фокусного расстояния
3.
 Светосила объектива –
Светосила объектива –способность обеспечивать тот или иной уровень
освещенности изображения при данной яркости
объектива
4. Угол поля изображения ( 2ω) –
Определяет возможность использования объектива
для съемки на том или ином формате кадра и
принадлежность объектива к короткофокусным,
нормальным или длиннофокусным
17. Связь между расстоянием от объектива до объекта и расстоянием от объектива до изображения
СВЯЗЬ МЕЖДУ РАССТОЯНИЕМ ОТ ОБЪЕКТИВА ДО ОБЪЕКТА ИРАССТОЯНИЕМ ОТ ОБЪЕКТИВА ДО ИЗОБРАЖЕНИЯ
Чем ближе объект, тем дальше за
линзой получается его изображение
и тем большим будет оно по размеру.
Когда объект приблизится на
двойное фокусное расстояние, и его
изображение окажется на таком
же расстоянии за линзой. Такие
условия возникают, например,
макросъёмке (с близкого
расстояния).
Если объект удалён от линзы
на расстояние, ровное фокусному
расстоянию этой линзы,
изображение
объекта окажется в бесконечности
18.
 ОправаОПРАВА
ОправаОПРАВАПредставляет собой трубчатую конструкцию, внутри
которой расположены линзы и диафрагма, а с внешней
стороны находятся кольца для управления диафрагмой и
фокусировки объектива
Отверстием диафрагмы изменяют освещенность изображения,
глубину резко изображаемого пространства и разрешающую силу
объектива
19. Затвор
ЗАТВОРУстройство, с помощью которого при съемке обеспечивается
продолжительность воздействия световых лучей на
фотоматериал
20. Экспонометры
ЭКСПОНОМЕТРЫНазначение:
Показ или установка оптимального сочетания выдержки с
диафрагмой для определенных световых условий и данной
светочувствительности фотопленки
21. Видоискатель
ВИДОИСКАТЕЛЬУстройство, с помощью которого определяют границы
пространства, изображаемого в пределах кадра, а в некоторых
конструкциях и осуществляют контроль за качеством изображения
Виды:
1 .Рамочный
2.Зеркальный
3 .Телескопический
4.
 Телескопический с подсвеченной рамкой в поле зрения
Телескопический с подсвеченной рамкой в поле зренияEnglish Русский Правила
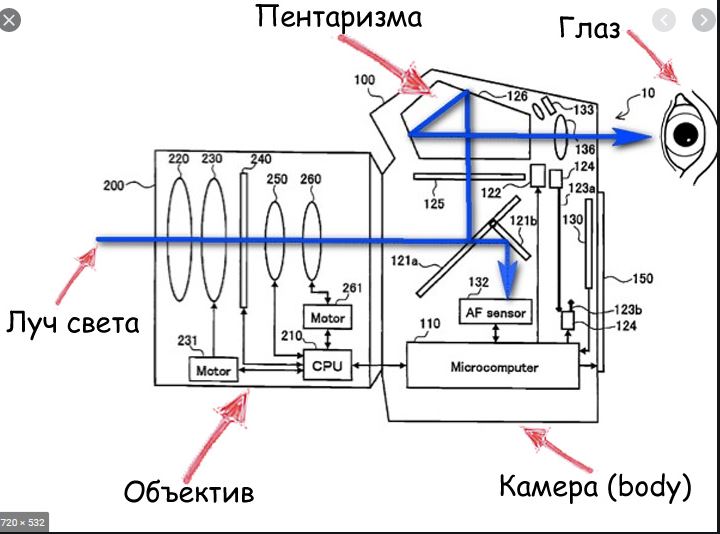
Большая часть цифровых фотоаппаратов внешне очень сильно напоминает пленочные фотокамеры. Особенно заметно это у зеркальных фотоаппаратов, которые независимо от типа светочувствительного элемента имеют оптический зеркальный видоискатель (за редкими исключениями), сменную оптику и, как следствие, характерный внешний вид. При этом, однако, внутренне строение цифрового фотоаппарата кардинально отличается от строения фотоаппарата пленочного. Как же устроен цифровой фотоаппарат? Основным отличием цифрового фотоаппарата от пленочного является то, что в качестве светочувствительного элемента в нем используется не пленка, а так называемая матрица, — светочувствительный сенсор. Сенсор преобразует свет в электрический сигнал, который затем обрабатывается графической системой на основе микропроцессора и записывается на карту памяти либо на встроенное постоянное запоминающее устройство. Сенсор (матрица) Матрица или сенсор – это полупроводниковая пластина, на которой расположены фотоэлементы. Фотоэлементов много — устройство цифровых фотоаппаратов самого высокого класса (так называемые среднеформатные цифровые камеры) предполагает наличие сенсора с 40 и даже 60 миллионами отдельных фотоэлементов. На рынке представлены сенсоры самых разных типов, однако в подавляющем большинстве цифровых фотоаппаратов используется ПЗС (прибор с зарядовой связью) и КМОП-сенсоры (комплементарный металл-оксид-полупроводник). Подробно об этих типах рассказано в соответствующих статьях: здесь мы отметим лишь, что ПЗС-сенсор обеспечивает более точную передачу цвета, но и больший уровень цифровых шумов, а КМОП отличается низким уровнем шумов, однако его цвета многим фотографам представляются не совсем естественными. Кроме того, КМОП матрицы в среднем дороже. Объектив Принципиальных отличие между объективами пленочных и цифровых фотоаппаратов нет. В некоторых цифровых камерах со сменной оптикой вполне могут использоваться объективы, которые стояли на пленочных камерах. В качестве примера можно привести объектив с байонетом F от Nikon. Все объективы с байонетом F (стандарт байонета F был принят компанией Nikon в 1959 году) устанавливаются на все цифровые зеркальные фотоаппараты Nikon вплоть до Nikon D7000, выпущенного осенью 2010 года. То же самое касается и советских объективов с байонетом Н (Калейнар 5Н, Гелиос-81Н). Затвор В пленочном фотоаппарате затвор открывает и закрывает шторки, которые ограничивают воздействие света на пленку. В компактных цифровых фотоаппаратах затвора нет: его роль выполняет электронное автоматическое устройство. Видоискатель Видоискатель, это устройство для визирования – то есть для предварительной оценки кадра. В зеркальных фотоаппаратах почти всегда используется так называемый оптический видоискатель, который представляет собой комплекс, состоящий из зеркал и пентапризмы (пентазеркала). Основная задача системы – передать изображение от зеркала в окошко видоискателя. Оптический видоискатель показывает изображение том виде, в котором оно существует в натуре, между тем как матрица и процессора могут фиксировать совсем иное (с учетом настроек фотоаппарата) Увидеть реальный кадр обладатель цифрового зеркального фотоаппарата сможет только на экране после того, как кадр сделан, либо при помощи режима Live View. Многие компактные и некоторые зеркальные цифровые фотоаппараты оборудованы электронным видоискателем. Электронный видоискатель снимает изображение с матрицы и показывает его таким, как видит его фотоаппарат с учетом настроек, ГРИП и других эффектов. В недорогих компактных цифровых фотоаппаратах видоискателя попросту нет, а визирование осуществляется по экрану дисплея при помощи режима Live View. Режим «LiveView» позволяет увидеть на экране фотоаппарат изображение в том виде, в котором оно зафиксируется в файле (с учетом погрешностей). Сегодня такой режим есть не только у компактных фотоаппаратов лишенных оптического видоискателя, но и у зеркальных камер. Микропроцессор Микропроцессор имел место и в некоторых пленочных камерах, однако в цифровых фотоаппаратах он является одним из важнейших элементов. Процессор управляет работой затвора, матрицы, оптики, выбором настроек, записью отснятого материала на носитель и другими процессами, происходящими в камере при подготовке к съемке, собственно съемке и просмотре отснятого материала. Накопитель Созданные при помощи цифрового фотоаппарата изображения и видеоролики необходимо куда-то записывать. В подавляющем большинстве фотоаппаратов для этой цели используют карты памяти типов SD, CompactFlash и т.п. (подробнее о картах памяти в статье «Карты памяти»). Некоторые фотоаппараты имеют также встроенную память небольшого объема. Обычно ее хватает для хранения нескольких (до 10) кадров. В старых цифровых фотоаппаратах в качестве накопителей использовали дискеты, мини-диски и даже аудиокассеты с пленкой. Внешние интерфейсы Цифровые фотоаппараты могут подключаться к ПК, телевизорам и другим устройствам при помощи внешних интерфейсов. Наиболее распространенным является USB интерфейс; в современных камерах также используется HDMI подключение. Некоторые, очень немногие фотоаппараты имеют и беспроводные интерфейсы подключения к внешним устройствам. Следует отметить, что интерфейсы могут использоваться не только для передачи информации, но и для подзарядки аккумуляторов. Впрочем, такая возможность есть далеко не у всех камер – у некоторых подключение и работа с внешними устройствами наоборот являются одной из самых энергозатратных процедур. Возврат к списку | Ilant-pravo.ru — правовой центр «Айлант» digital photo on Twitter Counter.com Новое в галереях:
|


 В зеркальных цифровых фотоаппаратах, а также в некоторых беззеркальных есть и электронное устройство, и механический затвор. Синхронная работа двух затворов позволяет обеспечить короткие выдержки и избежать появления ореола вокруг контрастных изображений. Подробно о затворах рассказано в статье «Затворы цифровых фотоаппаратов».
В зеркальных цифровых фотоаппаратах, а также в некоторых беззеркальных есть и электронное устройство, и механический затвор. Синхронная работа двух затворов позволяет обеспечить короткие выдержки и избежать появления ореола вокруг контрастных изображений. Подробно о затворах рассказано в статье «Затворы цифровых фотоаппаратов». В пленочной технике для этого приходилось не только сделать кадр, но и отработать, а затем извлечь и проявить всю пленку.
В пленочной технике для этого приходилось не только сделать кадр, но и отработать, а затем извлечь и проявить всю пленку.

Механизм цифровой камеры / Базовые знания цифровой камеры / ФОТОСТИЛЬ / Цифровые камеры
- Эта карта используется для хранения данных изображения, созданного при съемке фотографии цифровой камерой.
 Такие карты также называют носителями информации. При съемке большого количества фотографий удобно иметь карту памяти большой емкости или иметь под рукой запасные карты памяти.
Такие карты также называют носителями информации. При съемке большого количества фотографий удобно иметь карту памяти большой емкости или иметь под рукой запасные карты памяти.
 Такие карты также называют носителями информации. При съемке большого количества фотографий удобно иметь карту памяти большой емкости или иметь под рукой запасные карты памяти.
Такие карты также называют носителями информации. При съемке большого количества фотографий удобно иметь карту памяти большой емкости или иметь под рукой запасные карты памяти.- Цифровая камера не может делать фотографии без батареи. Обязательно зарядите аккумулятор перед съемкой, а в путешествие рекомендуется взять с собой зарядное устройство и дополнительный аккумулятор.
- Внешний видоискатель имеет смотровое окно, которое удобно использовать для проверки композиции и т. д. Существуют оптические типы и типы ЖК-дисплеев. Видоискатель может быть удобен, когда изображение на дисплее плохо видно, например, при съемке в ярко освещенных местах. Видоискатель облегчает концентрацию на изображении, а также может уменьшить размытость изображения при движении рук, поскольку для просмотра камера держится близко к голове.
- Эти аксессуары крепятся к передней части объектива. Если вы хотите получить еще более широкую область изображения, используйте широкоугольный конверсионный объектив, а если вы хотите большего увеличения объекта, используйте телеконверторный объектив.

- Чехол для камеры удобен для предотвращения загрязнения, царапин или ударов камеры при переноске. Когда камеру носят в сумке, чехол защищает ее от трения и столкновения с другими предметами.
- В целях безопасности настоятельно рекомендуем прикрепить к камере ремешок, чтобы она не выскользнула из рук и не упала. Есть шейные ремни, которые висят на шее, и ручные ремни, которые петляют вокруг запястья.
- Внешняя вспышка может дать вам более сильную вспышку света, чем вспышка, встроенная в камеру. С типом, который позволяет вам изменять угол наклона головки вспышки, вы можете распространять и смягчать свет, отражая его от стены или потолка.
- С помощью тросового переключателя вы можете делать фотографии, не касаясь непосредственно кнопки спуска затвора камеры. Это позволяет предотвратить смазывание изображения, которое может возникнуть, если камера перемещается в момент нажатия кнопки спуска затвора.
- Штатив используется для фотографирования с камерой в фиксированном положении. Это полезный аксессуар при съемке памятных фотографий с автоспуском и может понадобиться при съемке ночных сцен. Штатив предлагает множество других преимуществ, таких как предотвращение размытия рук и стабилизация композиции изображения.
Ссылка на дополнительную информацию о вариантах продукции RICOH
https://www.ricoh.com/r_dc/option/
- В пленочной камере свет, проходящий через объектив, попадает на пленку. Проявление пленки позволяет увидеть сделанную фотографию.
- В цифровой камере свет, проходящий через объектив, попадает на датчик изображения. Выходной сигнал датчика изображения обрабатывается в камере для создания данных изображения, которые сохраняются на карте памяти. Изображение можно одновременно просматривать на дисплее изображения.
Иллюстрации, представленные здесь, предназначены для использования только в качестве информативных примеров и были упрощены. Фактические детали экрана будут отличаться.
Фактические детали экрана будут отличаться.
Обзор структуры из движения — MATLAB & Simulink
Основное содержание
Обзор структуры по движению
Структура по движению (SfM) — это процесс оценки трехмерной структуры сцены по набор двумерных изображений. SfM используется во многих приложениях, таких как 3D-сканирование, дополненное реальность и визуальная одновременная локализация и отображение (vSLAM).
SfM можно вычислить разными способами. Путь который
ваш подход к проблеме зависит от различных факторов, таких как
количество и тип используемых камер, а также упорядочены ли изображения.
Если изображения сделаны одной откалиброванной камерой, то
Трехмерную структуру и движение камеры можно восстановить только и выше.
в масштабе . до масштаба означает, что
вы можете масштабировать структуру и величину движения камеры
и до сих пор сохраняю наблюдения. Например, если поставить камеру
близко к объекту можно увидеть то же изображение, что и при увеличении
объект и отодвиньте камеру подальше. Если вы хотите вычислить
фактический масштаб конструкции и движения в мировых единицах, вам нужно
дополнительная информация, такая как:
Если вы хотите вычислить
фактический масштаб конструкции и движения в мировых единицах, вам нужно
дополнительная информация, такая как:
Размер объекта в сцене
Информация с другого датчика, например, одометра.
Структура из движения с двух видов
Для простого случая конструкции из двух стационарных камер или одна движущаяся камера, один вид должен считаться камерой 1, а другая камера 2. В этом сценарии алгоритм предполагает, что камера 1 находится в начале координат, а его оптическая ось проходит вдоль оси z .
SfM требует точечных соответствий между изображениями. Найдите соответствующие точки, сопоставляя функции или отслеживая точек с изображения 1 на изображение 2. Методы отслеживания признаков, такие как как алгоритм Канаде-Лукаса-Томаси (KLT), хорошо работают, когда камеры находятся близко друг к другу. По мере того, как камеры отдаляются друг от друга, алгоритм KLT ломается, и вместо этого можно использовать сопоставление признаков.
Расстояние между камерами (базовый уровень) Method for Finding Point Correspondences Example Wide Match features using matchFeaturesFind Image Rotation and Scale Using Automated Feature Matching Narrow Track features using vision.PointTrackerОбнаружение и отслеживание лиц с использованием алгоритма KLT первой камеры, вы должны вычислить фундаментальную матрицу. Использовать соответствующие точки, найденные на предыдущем этапе вычисления. Фундаментальная матрица описывает эпиполярную геометрию двух камеры. Он связывает точку в одной камере с эпиполярной линией в другая камера. Используйте оценкаFundamentalMatrixфункция оценить фундаментальную матрицу.Введите фундаментальную матрицу в функцию
estrelpose. estrelposeвозвращает позу второй камеры в система координат первой камеры. Местоположение можно вычислить только для масштабирования, поэтому расстояние между двумя камерами устанавливается равным 1. Другими словами, расстояние между камерами определено равным 1 единице.Определение трехмерных местоположений совпадающих точек используя
треугольник. Потому что поза в масштабе, когда вы вычисляете структуру, она имеет правильная форма, но не фактический размер.Функция триангуляции
cameraProjection.Используйте
pcshowилиpcplayerдля отображения реконструкция. ИспользуйтеplotCameraдля визуализации позы камеры.Для восстановления масштаба реконструкции необходима дополнительная информация.
Один из способов
восстановить масштаб — это обнаружить на сцене объект известного размера. Пример структуры из движения из двух представлений показывает
как восстановить масштаб, обнаружив сферу известного размера в облаке точек
сцена.Структура движения из нескольких представлений
Для большинства приложений, таких как робототехника и автономное вождение, SfM использует более двух представлений.
Подход, используемый для SfM из двух представлений, может быть расширен для нескольких представлений. Набор несколько представлений, используемых для SfM, могут быть упорядочены или неупорядочены. Принятый здесь подход предполагает упорядоченная последовательность просмотров. SfM из нескольких представлений требует точечных соответствий на нескольких изображениях, называемых дорожками . Типичный подход заключается в вычислить треки из попарных точечных соответствий. Вы можете использовать
imageviewsetдля управления парными соответствиями и поиска дорожек. Каждая дорожка соответствует трехмерной точке сцены. Чтобы вычислить трехмерные точки из
дорожки, используйте triangulateMultiview. Трехмерная точка может храниться в объектеworldpointset. Объектworldpointsetтакже хранит соответствие между трехмерными точками. а двумерное изображение указывает на точки обзора камеры.С помощью подхода в SfM с двух ракурсов можно найти позу камеры 2 относительно камеры 1. Чтобы распространить этот подход на случай множественного обзора, найдите положение камеры 3 относительно на камеру 2 и так далее. Относительные позы должны быть преобразованы в общую координату система. Как правило, все позы камеры вычисляются относительно камеры 1, поэтому все позы находятся в одной системе координат. Вы можете использовать
imageviewsetдля управления позами камеры. Объектimageviewsetхранит представления и связи между представлениями.Каждая оценка позы камеры от одного вида к другому содержит ошибки. Ошибки возникают из-за неточной локализации точек на изображениях, а также от зашумленных совпадений и неточных калибровка. Эти ошибки накапливаются по мере увеличения количества просмотров. как дрейф . Один из способов уменьшить дрейф — уточнить позы камеры. и трехмерное расположение точек. Алгоритм нелинейной оптимизации, называемый связка корректировка , реализованная функцией
bundleAdjustment, может использоваться для уточнения. Вы можете исправить камера позиционирует и уточняет только трехмерные местоположения точек с помощьюbundleAdjustmentMotion. Вы также можете исправить позы камеры и уточнить только трехмерные местоположения с использованиемbundleAdjustmentStructure.Другой метод уменьшения дрейфа — использование графика положения .
оптимизация над imageviewsetобъект. Как только будет обнаружено закрытие цикла, добавьте заново подключение к объектуimageviewsetи использовать функциюoptimPosesдля уточнения поз камеры, ограниченных относительные позы.Пример структуры из движения из двух представлений показывает, как для реконструкции трехмерной сцены из последовательности двухмерных изображений. В примере используется приложение Camera Calibrator для калибровки камеры, которая снимает виды. Оно использует
imageviewsetобъект для хранения и управления данными, связанными с каждым вид.Пример монокулярной визуальной одновременной локализации и картирования показывает как обрабатывать данные изображения с монокулярной камеры для построения карты помещения окружающую среду и оценить движение камеры.
См. также
Приложения
- Калибратор стереокамеры | Калибратор камеры
Функции
-
регулировка пакета|комплектРегулировкаСтруктура|комплект AdjustmentMotion|стержень|камераПроекция|треугольный многоэкранный|оценкаFundamentalMatrix|matchFeatures
Объекты
-
imageviewset|набор точек мира|Vision.


 Один из способов
восстановить масштаб — это обнаружить на сцене объект известного размера. Пример структуры из движения из двух представлений показывает
как восстановить масштаб, обнаружив сферу известного размера в облаке точек
сцена.
Один из способов
восстановить масштаб — это обнаружить на сцене объект известного размера. Пример структуры из движения из двух представлений показывает
как восстановить масштаб, обнаружив сферу известного размера в облаке точек
сцена. Каждая дорожка соответствует трехмерной точке сцены. Чтобы вычислить трехмерные точки из
дорожки, используйте
Каждая дорожка соответствует трехмерной точке сцены. Чтобы вычислить трехмерные точки из
дорожки, используйте 
 оптимизация над
оптимизация над 