
Динамический диапазон матрицы: Динамический диапазон / Просто о фото / G-Foto.
Динамический диапазон / Просто о фото / G-Foto.
ДД фотокамеры — это предел, в котором она ещё может снимать без искажений.
Ограничен он снизу (в тенях) шумом самой матрицы фотоаппарата, когда шум выше сигнала получаемого извне на матрицу, тогда просто фотоаппарат показывает этот шум, то есть тёмное изображение по всему объёму, а не то, что фотографируем.
А сверху (в светах), ограничен перенасыщением сигнала, получаемого извне на матрицу, то есть когда света поступает так много, что он просто становится одинаковым на всех частях матрицы. В этом случае, так же фотаппарат показывает не то что фотографируем, а белую засвеченную массу.
Динамический диапазон принято выражать в (EV), то есть в единицах освещённости.
- В два раза светлее: 2 (EV)
- В три раза светлее: 3 (EV)
- в четыре раза светлее: 4 (EV)
В разделе HDR диапозон мы рассматривали, что такое ДД (динамический диапазон), например, у
человека он равен 14(EV).
Посмотрим чему он равен у фотоаппаратов.
Есть расхожее мнение, что он зависит, от того в какой битности файлами мы будем снимать, в 12бит, 14бит или 16бит. Некоторые считают, что ДД равен именно этим цифрам, то есть снимаем 12бит RAW, значит ДД будет 12 стопов (12EV). Это не так. И ДД вообще не зависит от того в каких мы снимаем форматах. ДД фотоаппарата — это предел самой техники.
Чем же определяется этот предел? Он определяется тремя параметрами:
- Размером пикселя, чем больше Пиксель матрицы, тем больше на него попадает СВЕТА, а значит тем больше можно извлечь из этого информации.
- Размером матрицы, чем больше сама Матрица фотоаппарата, тем больше на неё попадает света, а значит тем больше можно извлечь из этого информации.
- Процессором фотоаппарата, чем лучше конструкторы поставили на аппарат процессор, тем он круче обработает
то, что дали ему каждый Пиксель матрицы и сама Матрица.


Из практики так же мы знаем, что ДД фотоаппаратов на данный момент не ниже, чем 6 и не выше чем 15. То есть, самая плохая мыльница снимает с ДД равным 6 стопов (6EV), а самые крутые Среднеформатные камеры с ДД равным 15 стопов (15EV).
| Nikon D1H | 12.2 микрона |
| Canon 1D | 11.1 микрона |
| Canon D30 | 10.3 микрона |
| … | … |
| Smart Huawei P20 pro | 0.7 микрона |
| Smart Xiaomi 12T | 0.6 микрона |
Мы привели лучшие и худшие камеры по параматру размер пикселя. Он равен у лучших 9.7 микрона, а худшие камеры из нашей базы имеют размер пикселя 1.2 микрон. Посмотреть, как мы находили размер пикселя камеры можно на страничке Предел дифракции.
1. Размер пикселя
Итак, попробуем определить ДД камеры лишь по Размеру Пикселя. Возьмём обычную зеркалку 20 Мп и будем снимать в 14-ти битном RAW.
Тогда, выведем формулу для нахождения ДД такой фотокамеры, это будет нелинейная формула, в которой
самые плохие фотоаппараты не могут иметь ДД ниже, чем 6EV, а самые крутые не выше 12EV. Для этих камер это предельная величина.
Для этих камер это предельная величина.
Это функция — арктангенс, кому интересно может сам её посмотреть, мы же приводим саму функцию. $F — это переменная размер пикселя камеры. $DD — это полученный из формулы Динамический диапазон матрицы фотоаппарата.
| $x1 | = 1.2 | худший размер пикселя |
| $y1 | = 6 | худший Динамический Диапазон |
| $x2 | = 9.7 | лучший размер пикселя |
| $y2 | = 12 | лучший Динамический Диапазон |
| $pi | = 3.14 | Пи |
| $Ky | = ($y2-$y1)/$pi | Коэфф увеличения по Y |
| $Noll_x | = ($x2+$x1)/2 | Ноль отсчет по X |
| $F | = $F-$Noll_x | Скорректированный $F |
| $DD | = арктангенс($F) | Подставляем его в формулу |
| $DD | = $y1+ ($Ky*($DD+($pi/2))) | находим ДД камеры |
Ниже из таблицы видны возможные значения ДД фотокамеры.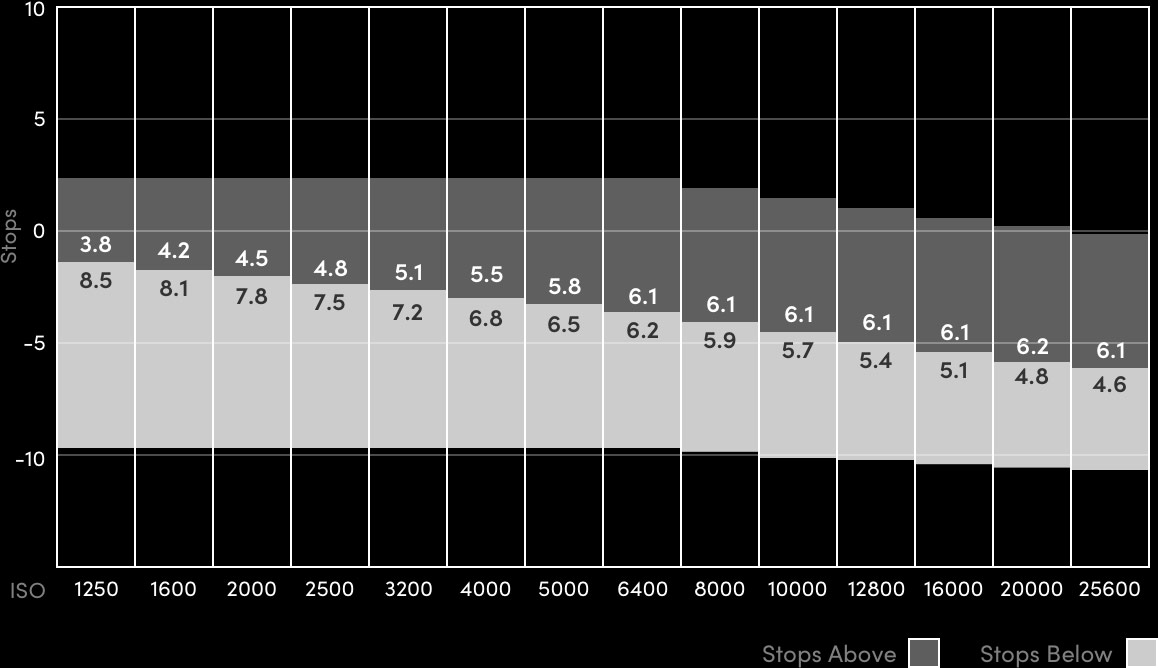 Видно, что самые худшие
не могут стать хуже, чем 6 стопов, а лучшие 12 стопов, худшая камера в нашей базе имела
размер пикселя 1.2 микрон, а лучшая 9.7 микрон.
Видно, что самые худшие
не могут стать хуже, чем 6 стопов, а лучшие 12 стопов, худшая камера в нашей базе имела
размер пикселя 1.2 микрон, а лучшая 9.7 микрон.
X Close
График функции ДД камерЧто можно сказать, поглядев на график? При размере пикселя до 5 мкм ничего не меняется и ДД камеры остаётся минимальным (6EV).
С шести до восьми микрон ДД камеры вырастает резко, почти до 11EV, а с рамера пикселя 11 микрон и далее ДД камеры остаётся на уровне 12EV.
Выкладки сделаны для камер с размером матрицы 20Мп и 14бит RAW. Если снимки будем делать в 12бит RAW они непеременно приведут к потере Динамического Диапазона.
Тогда в функцию, приведённую выше внесём поправку на битность:
- для 16бит RAW арктангенс($F-0)
- для 14бит RAW арктангенс($F-1)
- для 12бит RAW арктангенс($F-3)
- для 10бит RAW арктангенс($F-4)
- для 8 бит JPEG арктангенс($F-6)
То есть, ДД будет меньше на выходе в тех камерах, которые снимают в худших по битности форматах.
2. Размер матрицы
Есть матрицы 100Мп. На такую попадает света в 5 раз больше, чем на 20Мп обычную матрицу. Конечно, Динамический Диапазон таких камер выше.
Производители таких камер пишут в спецификации чему равен ДД фотоаппарата, потому как, это почти основной параметр, по котрому такие камеры покупают.
Мы сразу знаем ДД такой камеры. 100 Мп — 15EV.
Тогда, в нашу формулу добавим одну строку
Поправка = 3 + ( (Матрица — 20) / 18 )
если матрица 20 Мп — добавка +3
если матрица 100 Мп — добавка +7.4
Взято импирическим путём. При таких формулах у камер 100 МП, динамический диапазон получается 15EV, у остальных увеливается на 3EV, учитывая RAW, что из него как минмум три ступени можно вытянуть.
3. Процессор фотоаппарата
Невозможно учесть работу процессора, посчитать то, что придумали вчера и придумают изобретатели завтра, а потому можно просто сказать,
что чем новее фотоаппарат, тем при других равных условиях у него будет Динамический Диапазон выше.
4. Выводы
ТО есть, мы никак не можем учесть последний параметр в своих формулах. И, зачастую, результат ниших формул будет отличаться сильно от реальности. Однако, по болшинству камер их ДД РЕАЛЬНЫЙ, данные мы взяли на нескольких сайтах, которые утверждают, что провели испытания по определению ДД этих камер.
Формулы, приведённые выше, УЧИТЫВАЮТ реальные данные и можно спокойно сранвивать фотокамеры по параметру ДД на этом сайте.
Итак, осталось лишь определить ДД вашего фотоаппарата. Посмотреть какой у вашего аппарата ДД можно в общем списке, столбец ДД камеры.
Лучшие фотоаппараты приведём в следующем списке.
Посмотреть лучшие фотаппараты по критерию «Динамический диапазон».Предыдущая Следующая
| Добавить сообщение |
Динамический диапазон матрицы. Цифровая фотография.
 Трюки и эффекты Динамический диапазон матрицы. Цифровая фотография. Трюки и эффекты
Трюки и эффекты Динамический диапазон матрицы. Цифровая фотография. Трюки и эффектыВикиЧтение
Цифровая фотография. Трюки и эффекты
Гурский Юрий Анатольевич
Содержание
Динамический диапазон матрицы
Динамический диапазон светочувствительной матрицы – это ее способность воспринимать градации каждого из цветов. Говоря проще, динамический диапазон определяет, сколько ступеней разности контраста может увидеть и зафиксировать матрица. Идя от аналогии с фотографической пленкой, можно сказать, что динамический диапазон сенсора соответствует показателю фотографической широты пленки. Измеряется динамический диапазон в условных единицах, а для наглядности может быть определен как отношение сигнала к шуму. В качестве эталонного показателя динамического диапазона приняты градации нейтрального серого цвета. При современном уровне цифровой фототехники динамический диапазон самого совершенного сенсора лишь приближается к динамическому диапазону фотопленки.
Динамический диапазон связан с другим показателем – глубиной цвета, или его разрядностью. Глубиной цвета называется количество бит, описывающих цвет одного пиксела.
Данный текст является ознакомительным фрагментом.
Динамический пул потоков
Динамический пул потоков Динамический пул потоков не является каким-то специфическим механизмом, продиктованным именно микроядерной архитектурой QNX. Это удачная искусственная конструкция, все определения которой размещены в файле <sys/dispatch.h>. Удивительно не то, что в
Проверка попадания в диапазон. Предикат BETWEEN.
Проверка попадания в диапазон. Предикат BETWEEN.
Предикат BETWEEN проверяет, попадают ли значения проверяемого выражения в диапазон, задаваемый пограничными выражениями, соединяемыми служебным словом AND. Естественно, как и для предиката сравнения, выражения в предикате BETWEEN
Естественно, как и для предиката сравнения, выражения в предикате BETWEEN
8.1.8. Реализация разреженной матрицы
8.1.8. Реализация разреженной матрицы Иногда бывает нужен массив, в котором определена лишь небольшая часть элементов, а остальные не определены вовсе или (даже чаще) равны 0. Подобная разреженная матрица потребляет так много памяти зря, что были найдены способы более
9.4.1. Реализация графа в виде матрицы смежности
9.4.1. Реализация графа в виде матрицы смежности Нижеприведенный пример основан на двух предыдущих. В листинге 9.3 неориентированный граф реализован в виде матрицы смежности с помощью класса ZArray (см. раздел 8.1.26). Это нужно для того, чтобы новые элементы по умолчанию получали
11.14. Реализация динамической матрицы
11. 14. Реализация динамической матрицы
ПроблемаТребуется реализовать числовые матрицы, размерности которых (количество строк и столбцов) неизвестны на этапе компиляции.РешениеВ примере 11.28 показана универсальная и эффективная реализация класса динамической матрицы,
14. Реализация динамической матрицы
ПроблемаТребуется реализовать числовые матрицы, размерности которых (количество строк и столбцов) неизвестны на этапе компиляции.РешениеВ примере 11.28 показана универсальная и эффективная реализация класса динамической матрицы,
11.15. Реализация статической матрицы
11.15. Реализация статической матрицы ПроблемаТребуется эффективно реализовать матрицу, когда ее размерность (т.е. количество строк и столбцов) постоянна и известна на этапе компиляции.РешениеКогда размерность матрицы известна на этапе компиляции, компилятор может легко
Динамический блок
Динамический блок
Для обеспечения регулировки состояния блока по месту его расположения создаются динамические блоки. Они определяются путем указания настраиваемых свойств. Динамический блок должен содержать хотя бы один параметр и одну связанную с ним операцию.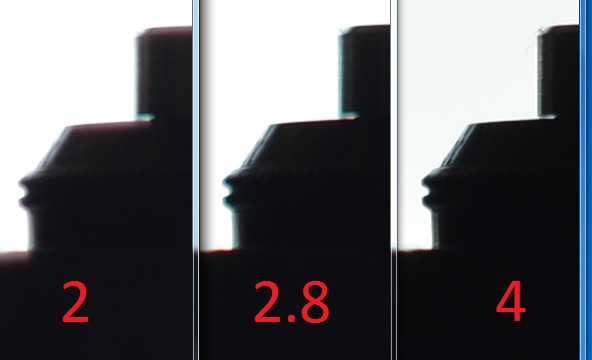
Динамический блок
Динамический блок Для обеспечения регулировки состояния блока по месту его расположения создаются динамические блоки. Они определяются путем указания настраиваемых свойств. Динамический блок должен содержать хотя бы один параметр и одну связанную с ним операцию.
Разрешение матрицы
Разрешение матрицы Мы знаем, что матрица состоит из мельчайших светочувствительных элементов. Количество таких элементов в матрице – это и есть ее разрешение. Разрешение матрицы получают умножением количества элементов по горизонтали и вертикали. Самые
Физический размер матрицы
Физический размер матрицы
Выбирая цифровую камеру, неплохо поинтересоваться физическим размером ее матрицы, ведь именно эта характеристика определяет качество камеры. Чем сенсор больше, тем больше он содержит ПЗС-элементов, тем выше его разрешение и, следовательно,
Чем сенсор больше, тем больше он содержит ПЗС-элементов, тем выше его разрешение и, следовательно,
Облет повисшего объекта, или Эффект «Матрицы»
Облет повисшего объекта, или Эффект «Матрицы» Несмотря на современные достижения компьютерной техники, для получения некоторых визуальных эффектов используются старые проверенные методы фотографии. Казалось бы, что общего может иметь фотография с таким современным
Статический тип, динамический тип
Статический тип, динамический тип Название последнего свойства предполагает различение «статического типа» и «динамического типа». Тип, который используется при объявлении некоторого элемента, является статическим типом соответствующей ссылки. Если во время выполнения
Чистка матрицы зеркальной камеры
Чистка матрицы зеркальной камеры
У владельцев зеркальных камер к радости от возможности смены объективов прибавляется забота о чистоте матрицы. Что делать, если вы заметили на снимках ровной светлой поверхности соринки и пятна? В некоторых моделях зеркальных камер
Что делать, если вы заметили на снимках ровной светлой поверхности соринки и пятна? В некоторых моделях зеркальных камер
Чистка матрицы зеркальной камеры
Чистка матрицы зеркальной камеры В зеркальной камере, в отличие от компактной, приходится чистить матрицу. Хотите вы или нет, но рано или поздно на матрицу попадает пыль, мелкие соринки. Насколько скоро это произойдет, зависит от частоты смены объективов, условий
ТЕМА НОМЕРА: Реформирование матрицы
ТЕМА НОМЕРА: Реформирование матрицы Автор: Леонид Левкович-МаслюкГде-то в конце 1980-х или начале 1990-х я читал в «Независимой газете» обзор событий в мире книг. Автор отмечал, что на прилавках появилось оригинальнейшее сочинение по истории древнего мира, которое написал
Цифровое рентгеновское изображение [Dels, размер матрицы, битовая глубина, динамический диапазон, частота дискретизации] • Как работает радиология
Основные понятия цифровых рентгеновских детекторов охватываются, включая важные понятия. Цифровые детекторы разделены на небольшие отдельные компоненты, называемые элементами детектора (DEL), а размер отдельных DEL называется шагом пикселя. Принимая во внимание, что размер матрицы — это количество DEL в каждом направлении на детекторе. Диапазон сигнала, в котором детектор может точно отображать измеренное рентгеновское излучение, называется динамическим диапазоном. Разрядность — это количество отдельных компьютерных битов, используемых при сохранении значения для каждого DEL.
Цифровые детекторы разделены на небольшие отдельные компоненты, называемые элементами детектора (DEL), а размер отдельных DEL называется шагом пикселя. Принимая во внимание, что размер матрицы — это количество DEL в каждом направлении на детекторе. Диапазон сигнала, в котором детектор может точно отображать измеренное рентгеновское излучение, называется динамическим диапазоном. Разрядность — это количество отдельных компьютерных битов, используемых при сохранении значения для каждого DEL.
СОДЕРЖАНИЕ СОДЕРЖАНИЕ
- Терминология выборки цифровых излучений
- Элементы детектора
- Размер
- Частота выборки
- Пример расчеты
- Цифровой выборки концепции
- .
Здесь мы обсудим терминологию, относящуюся к размеру каждого элемента детектора, чтобы, когда такие определения, как шаг детектора или доля заполнения, попадались вам на глаза, вы хорошо понимали их значение.
Детекторные элементы
Как и цифровая фотография, рентгеновские изображения формируются с помощью цифровых элементов (DEL). Когда изображение сохраняется после его получения или когда оно отображается на мониторе, отдельные элементы называются элементами изображения (пикселями).
Когда изображение сохраняется после его получения или когда оно отображается на мониторе, отдельные элементы называются элементами изображения (пикселями).
Просто для ясности мы используем другую терминологию для описания физических элементов детектора (DEL).
Затем шаг детектора определяется как расстояние от конца до конца в пределах DEL. Следовательно, меньший размер DEL даст меньший шаг.
Кроме того, в каждом DEL есть область, которая может обнаруживать рентгеновские лучи, и неактивная область (например, электроника каждого DEL). Область, в которой могут взаимодействовать рентгеновские лучи, называется активной областью. Область, которая не может обнаружить рентгеновские лучи, называется неактивной областью.
Отношение активной площади ДЭС к общему размеру каждого ДЭС называется «фракцией заполнения».
Таким образом, доля заполнения детектора будет представлять собой число от 0 до 1. Чем больше доля заполнения, тем больше рентгеновских лучей будет захвачено при измерениях.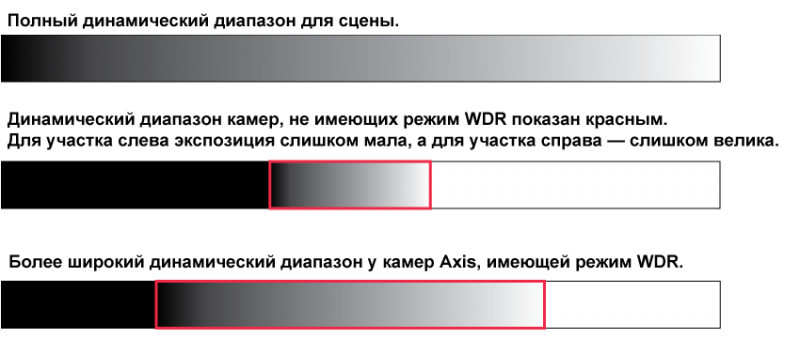 Таким образом, более высокая фракция заполнения будет более эффективной по дозе. В общем, по мере того, как размер каждого DEL становится меньше, задача состоит в том, чтобы гарантировать, что фракция заполнения остается высокой, поскольку для каждого DEL есть связанная электроника.
Таким образом, более высокая фракция заполнения будет более эффективной по дозе. В общем, по мере того, как размер каждого DEL становится меньше, задача состоит в том, чтобы гарантировать, что фракция заполнения остается высокой, поскольку для каждого DEL есть связанная электроника.
Rad Take-Home Point : Цифровой рентгеновский детектор можно разделить на детекторные элементы (DEL), и каждый элемент имеет долю заполнения, которая указывает геометрическую эффективность детектора для сбора рентгеновского сигнала.
Размер матрицы
Матрица детектора состоит из множества отдельных DEL. Размер матрицы представляет собой двумерное число. Если размер матрицы 1024 x 1024, это означает, что матрица имеет более одного миллиона DEL.
Существуют также медицинские плоскопанельные детекторы с матрицей 4288×4288.
Мы можем поместить эти числа в контекст, который мы можем сравнить с цифровыми камерами, где размер матрицы обычно указывается в мегапикселях.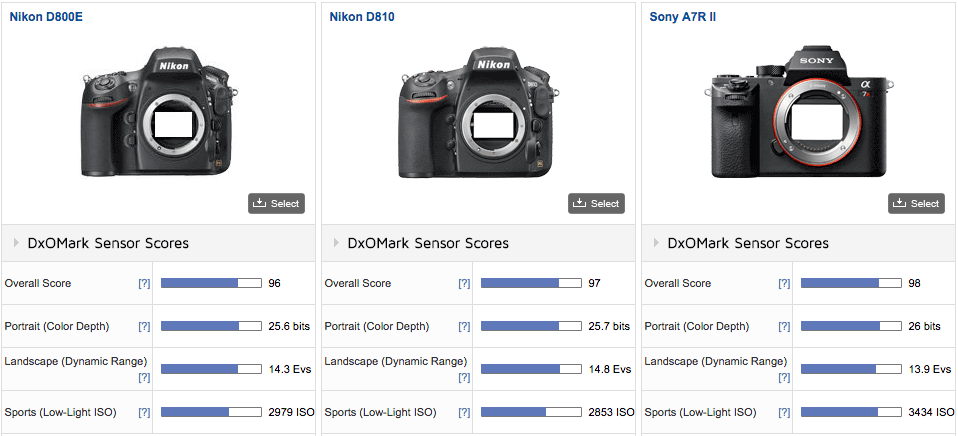 Детектор 1024×1024 равен 1 мегапикселю. Мегапиксель определяется как 2 20 , что немного превышает 1 миллион. Детектор с разрешением 4288×4288 эквивалентен датчику с разрешением 17,5 мегапикселей с точки зрения количества Del.
Детектор 1024×1024 равен 1 мегапикселю. Мегапиксель определяется как 2 20 , что немного превышает 1 миллион. Детектор с разрешением 4288×4288 эквивалентен датчику с разрешением 17,5 мегапикселей с точки зрения количества Del.
Rad Take-home Point : Размер матрицы цифрового рентгеновского детектора указывает количество элементов во всем детекторе.
Частота дискретизации
Еще одной важной характеристикой цифрового плоскопанельного детектора является частота дискретизации в детекторе. Это еще один способ выразить размер каждого Del.
Частота дискретизации обратно пропорциональна шагу пикселя.
Если DEL больше (т.е. имеют больший шаг), то частота дискретизации будет меньше. Чем меньше DEL, тем выше частота дискретизации.
Рад Возьми домой Пункт : Частота дискретизации обратно пропорциональна высоте тона каждого элемента Del.
Пример расчета
Давайте рассмотрим пример, чтобы понять, как рассчитываются эти параметры.
Если представить, что размер нашего детектора 50см х 50см и размер матрицы 1000 х 1000. Значит размер пикселя по формуле будет:
Итак, частота дискретизации будет рассчитываться так:
Мы также может рассчитать коэффициент заполнения для примера случая. Если размер DEL составляет 1 мм x 1 мм, а размер активной области составляет 0,5 мм x 0,5 мм, какой будет активная область?
Этот детектор считается детектором с низкой долей заполнения, поскольку только четверть площади детектора активна и регистрирует рентгеновские лучи.
Rad Take home Point : Так же, как и в цифровой фотографии, существует несколько основных параметров, которые характеризуют цифровой детектор рентгеновского излучения на высоком уровне.
Обзор
Большинство рентгеновских систем в США используют цифровые детекторы рентгеновского излучения (плоские детекторы с непрямым или прямым преобразованием) или так называемую компьютерную рентгенографию, в которой также используется цифровое считывание.
Поскольку вы являетесь радиологическим технологом или студентом и используете или скоро будете использовать эти системы много раз в день, вас, вероятно, интересуют важные концепции формирования цифрового изображения.
Физика различных типов детекторов будет рассмотрена в другой статье, но здесь мы сосредоточимся на общих чертах всех цифровых рентгеновских систем.
R a d Точка возврата : Рентгеновские лучи взаимодействуют с детектором, создавая аналоговый сигнал, который затем преобразуется в цифровой сигнал (номер для каждого элемента детектора) в детекторе.
Битовая глубина
Мы начнем с примера наиболее распространенного рентгеновского детектора, используемого в клинической практике. В детекторе непрямого рентгеновского излучения, когда рентгеновские лучи попадают на детектор, они преобразуются в фотоны видимого света. Эти световые фотоны измеряются фотодиодом, который преобразует их в электроны.
В этом случае количество электронов является аналоговым сигналом и оцифровывается по мере прохождения электронов по цепям, и каждому элементу детектора присваивается одно число.
Цифровая схема преобразует энергию, выделенную детектором, в дискретное (т. е. оцифрованное) число. На рисунке видно влияние количества бинов на оцифровку. Слева истинная энергия. Справа представлены оцифрованные версии сигнала с разной разрядностью.
При оцифровке сигнала каждый бит будет установлен либо в 0, либо в 1. Он устанавливается в 1, если истинный сигнал выше уровня, и в 0, если истинный сигнал ниже уровня.
Количество уровней при оцифровке напрямую связано с тем, сколько разрядов имеет детектор в схеме аналого-цифрового преобразования: количество уровней = 2 N , где N — разрядность.
Таким образом, если мы используем 4-битное преобразование энергии в цифровой сигнал, точность будет намного меньше, чем в случае 8- или 16-битного преобразования. В целом, чем больше у вас уровней (т. е. чем выше битовая глубина), тем более точным будет изображение.
В целом, чем больше у вас уровней (т. е. чем выше битовая глубина), тем более точным будет изображение.
Rad Take-Home Point : Во всех цифровых детекторах рентгеновского излучения аналоговый сигнал преобразуется в цифровой сигнал, и преобразование становится более точным при использовании большей разрядности.
Динамический диапазон
Динамический диапазон также является частью процесса оцифровки и связан с битовой глубиной. Динамический диапазон — это диапазон, в котором сигнал будет должным образом оцифрован. Например, для сигналов, которые выше верхней границы динамического диапазона, считываемый сигнал будет насыщенным, поскольку он не может обрабатывать высокие уровни сигнала.
Как обсуждалось в разделе выше, желательно уменьшить размер каждого бина оцифровки. Это может быть достигнуто путем добавления большего количества бинов, как обсуждалось выше. Длина каждого бина также может быть уменьшена за счет уменьшения поддерживаемого диапазона. Этот диапазон поддерживаемых уровней сигнала называется динамическим диапазоном системы. Высота каждого бина оцифровки определяется просто: Высота цифрового бина = Динамический диапазон / (Количество бинов -1).
Этот диапазон поддерживаемых уровней сигнала называется динамическим диапазоном системы. Высота каждого бина оцифровки определяется просто: Высота цифрового бина = Динамический диапазон / (Количество бинов -1).
На этом рисунке показаны проблемы, которые могут возникнуть, и почему необходимо тщательно выбирать динамический диапазон и битовую глубину. На рисунке динамический диапазон изменен, а битовая глубина остается неизменной.
Если динамический диапазон системы слишком мал, то сигналы с очень высоким уровнем сигнала будут насыщены, и истинное значение не будет записано, а будет использоваться только самое высокое значение, которое система может записать.
С другой стороны, если динамический диапазон слишком велик, при преобразовании будут потеряны биты, которые никогда не используются, и каждый бит будет покрывать больший диапазон сигнала. Поскольку желательно, чтобы каждый бит покрывал меньший диапазон сигнала, слишком большой динамический диапазон также не является оптимальным.
В оптимальном случае динамический диапазон системы будет охватывать почти все уровни сигналов, которые ожидаются в системе, так что не произойдет насыщения, но он не будет настолько большим, чтобы возникали значительные ошибки оцифровки. Когда динамический диапазон выбран правильно, это «хорошо выбранная» область на рисунке.
На клинических изображениях, если детектор не имеет достаточно большого динамического диапазона, значения в областях с очень высоким уровнем сигнала, таких как легкие, будут насыщенными, а структурные различия в легочной ткани будут потеряны.
Rad Take home Point : Диапазон всех значений, которые должным образом оцифрованы, известен как динамический диапазон детектора, и динамический диапазон должен быть выбран соответствующим образом, чтобы уменьшить размер каждого интервала выборки, но без насыщения.
без названия
%PDF-1.