
Матрица в видеокамере: Матрица — что это такое?
Разбираемся в светочувствительных матрицах: CMOS и CCD
25 августа 2017
8 комментариев
Светочувствительная матрица — это «глаз» вашей видеокамеры безопасности. Она захватывает свет, попавший в объектив видеокамеры безопасности, и преобразовывает его в электронный сигнал.
Формат, или размер, матрицы определяет охват ваших камер безопасности. Самыми популярными форматами являются следующие: 2/3″, 1/2″ и 1/3″.
- Матрица с диагональю 2/3″ позволяет вести видеонаблюдение на больших расстояниях в условиях очень низкой освещенности.
- Матрица с диагональю 1/2″ — в большинстве случаев, представляет собой оптимальное решение с приемлемой светочувствительностью.
- Матрица с диагональю 1/3″ обеспечивает хорошую производительность при низкой освещенности и высокой частоте кадров.
Самыми популярными типами матриц по применяемой технологии являются CMOS (КМОП-матрица) и CCD (ПЗС-матрица).
1. Видеокамеры наблюдения с КМОП-матрицей: за и против
КМОП (CMOS) означает комплементарный металл-оксид-полупроводник (Complementary Metal Oxide Semiconductor). В видеокамерах безопасности с матрицей CMOS используется технология прогрессивного сканирования.
Преимущества и недостатки видеокамеры наблюдения с CMOS-матрицей
Преимущества видеокамеры наблюдения с CMOS-матрицей
- Высокое разрешение
- Отличная цветопередача
- Высокая кадровая частота
- Низкое энергопотребление
- Экономическая эффективность
Недостатки видеокамеры наблюдения с CMOS-матрицей
- Высокий уровень шума
- Умеренная светочувствительность
2. Видеокамеры наблюдения с ПЗС-матрицей: за и против
Аббревиатура ПЗС (CCD) означает прибор с зарядовой связью (Charge Coupled Device). Видеокамеры наблюдения с ПЗС-матрицами имеют отличный WDR (широкий динамический диапазон), поэтому часто используются в условиях низкой освещенности. Камеры безопасности с матрицами CCD, как правило, менее подвержены влиянию вибраций по сравнению с камерами безопасности с матрицами CMOS.
Камеры безопасности с матрицами CCD, как правило, менее подвержены влиянию вибраций по сравнению с камерами безопасности с матрицами CMOS.
Сильные и слабые стороны видеокамеры наблюдения с CCD-матрицей
Сильные стороны видеокамеры наблюдения с CCD-матрицей
- Хорошая производительность в условиях низкой освещенности
- Хорошая технология WDR
- Меньшая восприимчивость к вибрационному эффекту
- Низкий уровень шума
- Высокая чувствительность
- Высокое разрешение
Недостатки видеокамеры наблюдения с CCD-матрицей
- Высокое энергопотребление
- Низкая кадровая частота
- Дороговизна
CMOS или CCD — что лучше?
Раунд 1: Кадровая частота и потребляемая мощность
Камера безопасности с CMOS-датчиком является однозначным победителем по частоте кадров. Камера безопасности с CMOS-датчиком может напрямую преобразовывать фотоэлектрический сигнал в цифровой сигнал. Частота кадров и скорость процесса преобразования сигнала CMOS-датчиком гораздо больше по сравнению с CCD-датчиком.
Частота кадров и скорость процесса преобразования сигнала CMOS-датчиком гораздо больше по сравнению с CCD-датчиком.
Аналого-цифровое преобразование происходит за пределами CCD-датчиков, поэтому формирование изображений и видео происходит дольше. Кроме того, видеокамеры безопасности с датчиками изображения CCD часто страдают от проблемы перегрева.
Камеры видеонаблюдения с CMOS-датчиками поддерживают гораздо более высокую кадровую частоту и потребляют меньше энергии, а также более экономичны по сравнению с камерами безопасности с CCD-датчиками. Обычно цена камеры видеонаблюдения с CMOS-матрицей более приятная, чем цена камеры безопасности с CCD-матрицей.
Поэтому победителем первого раунда становится видеокамера с CMOS-матрицей!
Раунд 2: Качество изображения
Как правило, камеры безопасности с CCD-матрицей создают изображения с более высоким разрешением. Тем не менее, развитие технологий может поставить качество изображений CMOS на один уровень с CCD.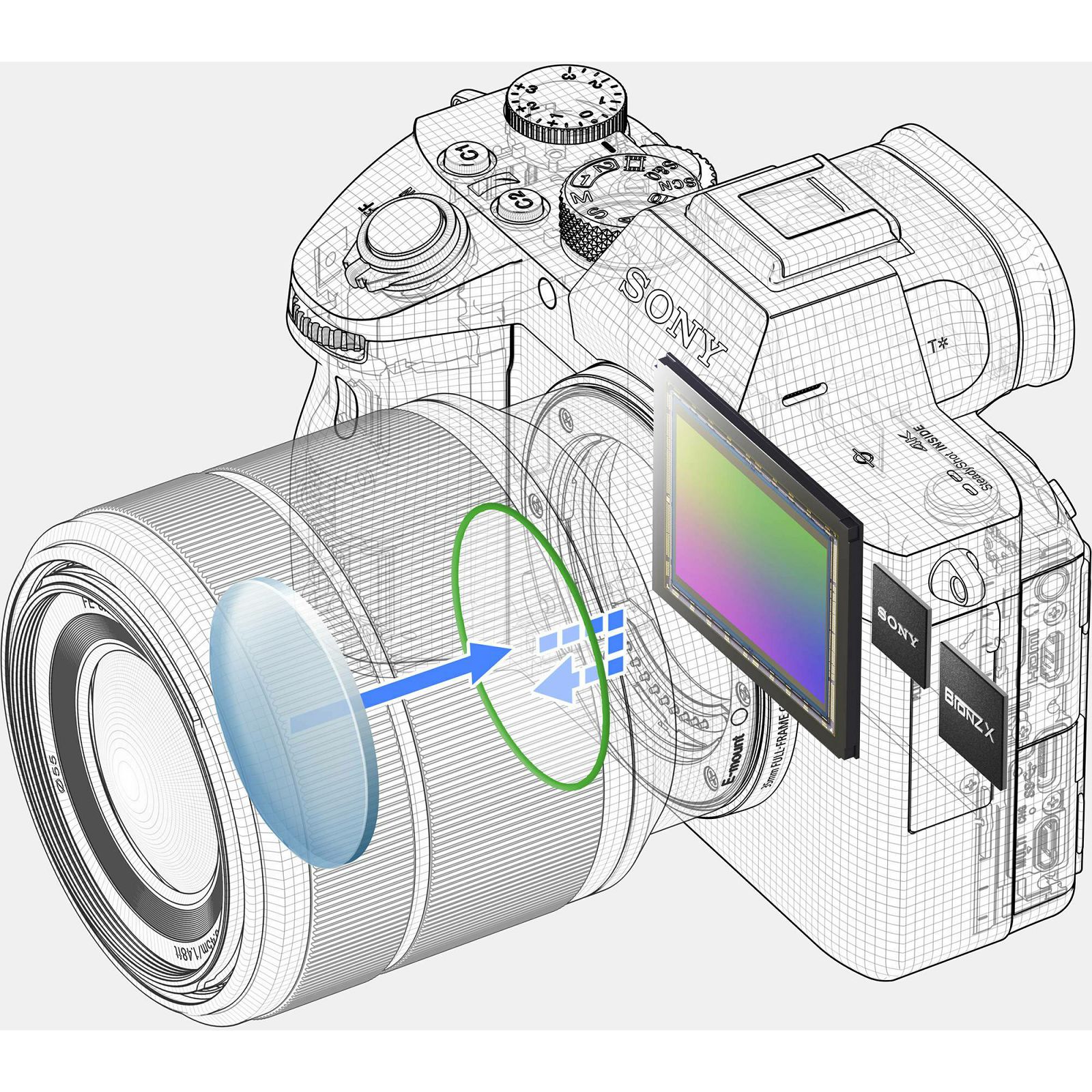 Например, видеокамеры безопасности с CMOS датчиками и оптическим зумом могут создавать даже более четкие изображения, чем видеокамеры с матрицами CCD.
Например, видеокамеры безопасности с CMOS датчиками и оптическим зумом могут создавать даже более четкие изображения, чем видеокамеры с матрицами CCD.
Итак, второй раунд — ничья!
Раунд 3: Светочувствительность и шум
Традиционно, ПЗС-датчики менее подвержены искажениям изображения и имеют более высокую светочувствительность, поэтому создают гораздо меньше шума, чем камеры безопасности с датчиками CMOS. Однако, в настоящее время, в плане чувствительности, камеры видеонаблюдения с матрицами CMOS иногда даже превосходят CCD видеокамеры.
Трудно сказать, кто станет победителем в категориях светочувствительности и шума. Однако, исходя из текущего уровня развития технологии и производительности, видеокамеры с матрицей CCD становятся победителями в третьем раунде (возможно, это временная победа).
Основываясь на приведенной выше информации и подробном сравнении двух типов датчиков, можно обнаружить, что каждый тип датчика имеет свои плюсы и минусы.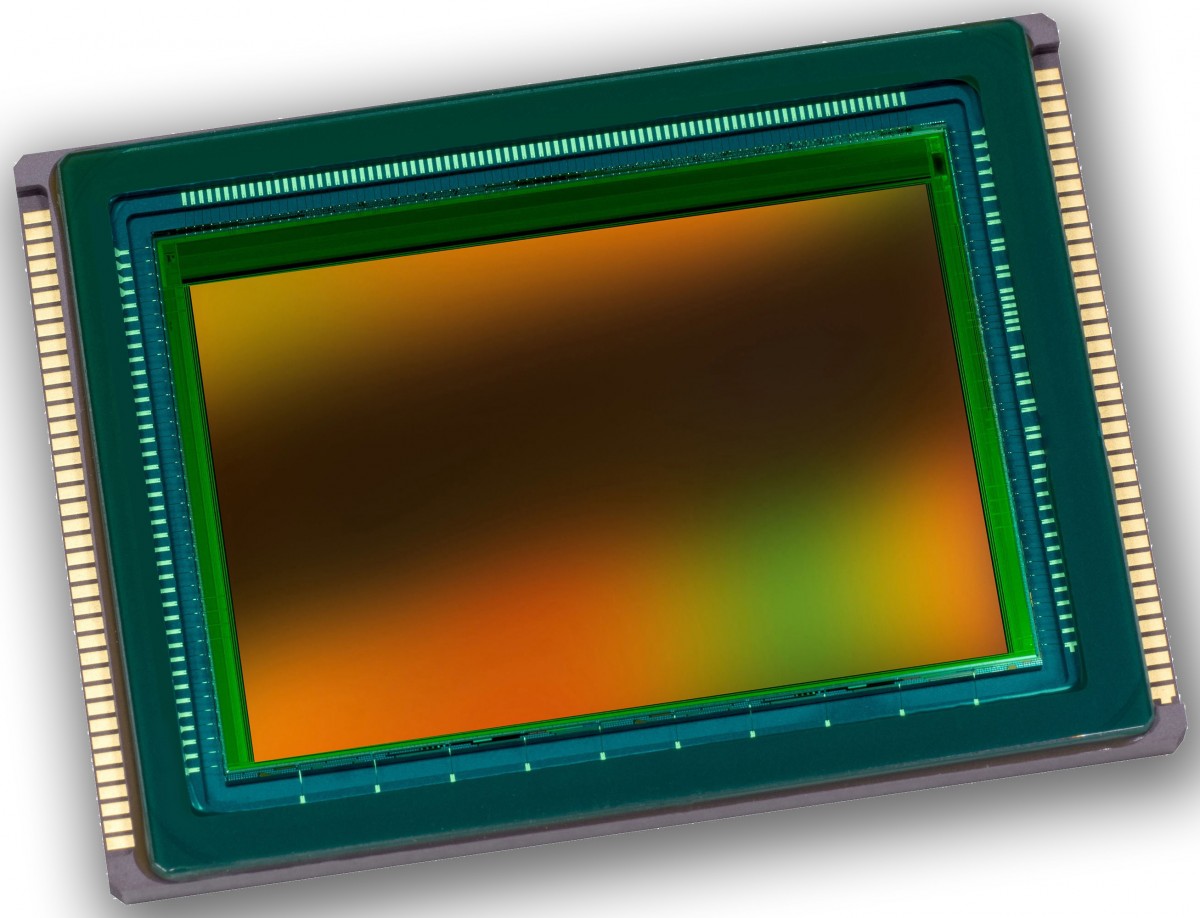
В этой битве не может быть одного победителя. Все сводится к конкретному случаю:
1. Вы можете выбрать камеры безопасности с CCD-датчиками, если их использование будет происходить в условиях низкой освещенности.
Примечание: Некоторые камеры безопасности с CMOS-матрицами также могут обеспечить отличное наблюдение в темное время суток.
2. Видеокамеры наблюдения с CMOS-датчиками могут быть более компактными, поскольку размеры самих CMOS-датчиков могут быть очень маленькими. Поэтому можете выбрать их, если не хотите привлекать внимания к своей системе наблюдения.
3. Выбирайте видеокамеры безопасности с CMOS-матрицей, если ваше интернет-подключение недостаточно качественное. Видеокамеры наблюдения с CMOS-матрицей имеют меньше требований к ширине полосы пропускания, поэтому не будут перегружать вашу сеть.
Источник reolink.com. Перевод статьи выполнила администратор сайта Елена Пономаренко.
Поделиться
Твитнуть
Поделится
Поделится
Датчик
2 — мегапиксельная CMOS-матрица.
Ответить
Действительно толковая статья.
Хорошая статья, все описано обстоятельно и грамотно . 5звезд.
Новый комментарий
Войти с помощью
Отправить
CCTVLab. Статьи — статьи экспертов рынка систем безопасности
Первоначально в ТВ камерах использовали в качестве преобразователя свет — сигнал (датчика изображения) видиконы. Камеры при этом имели большие габариты и высокую инерционность, плохую чувствительность, большую потребляемую мощность и короткий срок службы. Видикон — электронно-лучевой прибор, в котором фоточувствительная мишень служит для построчного считывания изображения.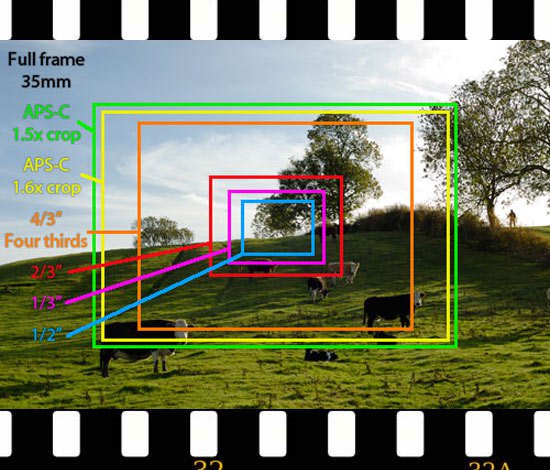
Благодаря развитию полупроводниковой технологии, были созданы фото приборы с зарядовой связью (ФПЗС), которые позволили разработать полностью твердотельные матричные преобразователи свет — сигнал.
Все современные телевизионные камеры строятся на основе ПЗС — матриц. Свет, падающий на матрицу, вызывает накопление в каждой ячейке матрицы электрического заряда, пропорционального освещенности этой ячейки, этот электрический заряд периодически последовательно считывается со всех ячеек матрицы и преобразуется в видеосигнал, который и выводится на монитор. Поверхность ПЗС — матрицы состоит из множества светочувствительных ячеек — пикселей (их обычно от 270000 до 440000). Чем больше число пикселей, тем изображение более качественное и четкое. Большинство телекамер в настоящее время производится на основе матриц фирм “Sony”, “Samsung” и “Sharp”.
Формат матрицы
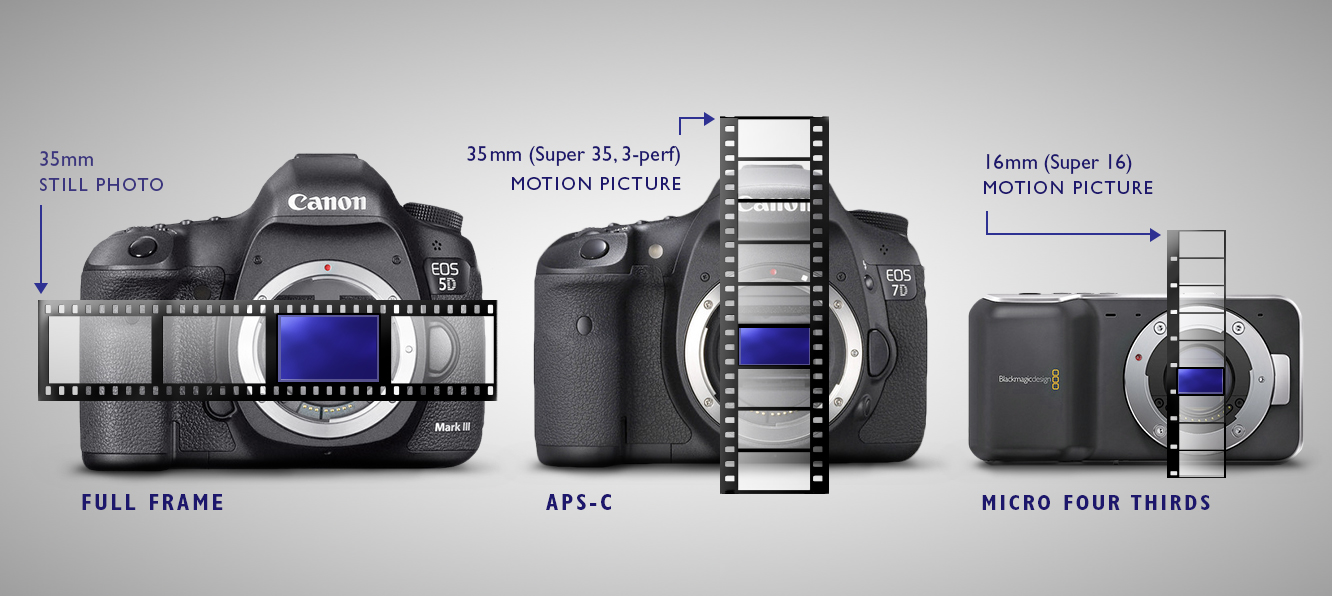
Размер матрицы описывается параметром, называемым формат. Формат — это размер диагонали матрицы, приблизительно равный диаметру мишени соответствующего видикона.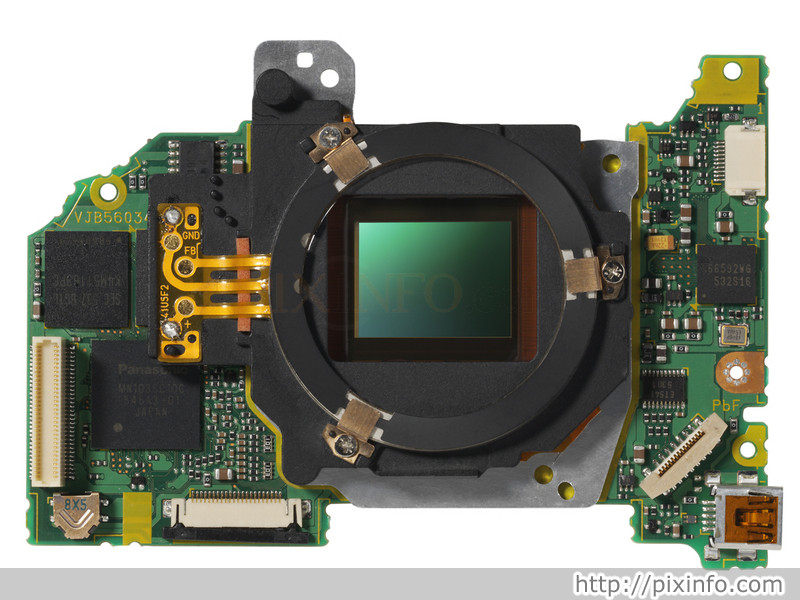 Он измеряется в дюймах и принимает значения: 1», 2/3»,1/2″, 1/3″, 1/4″. Матрицы большого формата 1″, 2/3» практически перестали выпускаться, так как камеры на их основе получаются очень громоздкими и дорогими. Последние модели ПЗС — матриц фирмы «Sony» имеют формат 1/4». На основе таких матриц некоторые фирмы выпускают сверхминиатюрные камеры.
Он измеряется в дюймах и принимает значения: 1», 2/3»,1/2″, 1/3″, 1/4″. Матрицы большого формата 1″, 2/3» практически перестали выпускаться, так как камеры на их основе получаются очень громоздкими и дорогими. Последние модели ПЗС — матриц фирмы «Sony» имеют формат 1/4». На основе таких матриц некоторые фирмы выпускают сверхминиатюрные камеры.
Совершенствование технологий позволяет производить уменьшение формата без ухудшения качества передаваемого изображения. Каждая новая матрица при меньшем формате имеет разрешение не хуже, чем предшественница.
Размер матрицы важен при определении необходимого угла обзора камеры. С одинаковыми объективами камера на основе матрицы 1/2″ имеет больший угол зрения, чем камера с матрицей І/3″.
Разрешение
Важный параметр ТВ камеры — разрешение. Этот параметр определяет возможности камеры по воспроизведению мелких деталей изображения: чем выше разрешение, тем больше детальность, информативность картинки. Разрешение измеряется в телевизионных линиях (ТВЛ) и зависит не только от числа пикселей в матрице, но и от параметров электронной схемы камеры. В большинстве случаев разрешение 380-400 ТВЛ вполне достаточно для наблюдения. Существуют камеры, имеющие более высокое разрешение — 560-570 ТВЛ. Такие камеры позволяют четко видеть мелкие детали изображения (номера машин, лица людей и т.д.). Разрешение цветных камер несколько хуже, чем разрешение черно-белых: 300 — 350 ТВЛ. Существуют цветные камеры более высокого разрешения — 460 ТВЛ. В настоящее время на рынке систем видеонаблюдения появились цифровые (DSP — цифровая обработка изображения) цветные камеры высокого разрешения (460-480 ТВЛ).
Разрешение измеряется в телевизионных линиях (ТВЛ) и зависит не только от числа пикселей в матрице, но и от параметров электронной схемы камеры. В большинстве случаев разрешение 380-400 ТВЛ вполне достаточно для наблюдения. Существуют камеры, имеющие более высокое разрешение — 560-570 ТВЛ. Такие камеры позволяют четко видеть мелкие детали изображения (номера машин, лица людей и т.д.). Разрешение цветных камер несколько хуже, чем разрешение черно-белых: 300 — 350 ТВЛ. Существуют цветные камеры более высокого разрешения — 460 ТВЛ. В настоящее время на рынке систем видеонаблюдения появились цифровые (DSP — цифровая обработка изображения) цветные камеры высокого разрешения (460-480 ТВЛ).
Для того чтобы определить разрешение, обычно пользуются специальной телевизионной тест — таблицей, в которой изображены группы линий, расстояние между которыми соответствует определенному разрешению; при этом разрешение камеры определяется по тому участку таблицы, где линии в группе перестают быть различимы раздельно. Разрешение (разрешающая способность) определяется, как количество переходов (в видимой части растра) от черного к белому или обратно, которое может быть передано камерой. Поэтому единица измерения разрешения называется телевизионной линией (ТВЛ). Разрешение по вертикали у всех камер стандарта CCIR (кроме камер совсем уж плохого качества) одинаково, ибо ограничено телевизионным стандартом — 625 строк телевизионной развертки. Основное различие камер состоит в разрешении по горизонтали, и именно оно обычно указывается в технических описаниях. К сожалению, существующее определение разрешающей способности не совсем приспособлено для современных CCD-камер.
Разрешение (разрешающая способность) определяется, как количество переходов (в видимой части растра) от черного к белому или обратно, которое может быть передано камерой. Поэтому единица измерения разрешения называется телевизионной линией (ТВЛ). Разрешение по вертикали у всех камер стандарта CCIR (кроме камер совсем уж плохого качества) одинаково, ибо ограничено телевизионным стандартом — 625 строк телевизионной развертки. Основное различие камер состоит в разрешении по горизонтали, и именно оно обычно указывается в технических описаниях. К сожалению, существующее определение разрешающей способности не совсем приспособлено для современных CCD-камер.
На разрешение камеры влияют два фактора: количество горизонтальных элементов матрицы и полоса частот видеосигнала, формируемого камерой. Дискретная точечная структура матрицы приводит к эффекту «биения» при наблюдении полосатой картинки. Например, если у матрицы 520 элементов по горизонтали, то, направив ее на тестовую таблицу, содержащую 260 черных и 260 белых линий, мы увидим четкую картинку из 520 линий. Однако если сместить изображение на половину ячейки матрицы, то на каждую ячейку попадет половинка черной и половинка белой линии. Эта камера может, в принципе, передать 520 линий (однако очень неустойчиво). Принято считать, что надежно в таком случае передается количество линий, не превышающее 3/4 от числа ячеек. То есть камера с 520 элементами имеет разрешение 390 ТВЛ. В настоящее время такой подход практически закрепился в стандартах, однако, нередко недобросовестные производители в рекламных целях указывают завышенное значение своих камер.
Однако если сместить изображение на половину ячейки матрицы, то на каждую ячейку попадет половинка черной и половинка белой линии. Эта камера может, в принципе, передать 520 линий (однако очень неустойчиво). Принято считать, что надежно в таком случае передается количество линий, не превышающее 3/4 от числа ячеек. То есть камера с 520 элементами имеет разрешение 390 ТВЛ. В настоящее время такой подход практически закрепился в стандартах, однако, нередко недобросовестные производители в рекламных целях указывают завышенное значение своих камер.
Для передачи сигнала 390 ТВЛ необходима полоса частот 3,75МГц (195 периодов на 52 мкс активной части строки телевизионной развертки). В настоящее время создание полупроводниковых усилителей не представляет проблемы, поэтому полоса пропускания усилителей камеры обычно значительно (в 1,5-2 раза) превосходит необходимую. Так что разрешение ограничивается именно дискретностью структуры ПЗС — матрицы.
Иногда факт применения хорошего электронного усилителя называют терминами «resolution enhancement» или «edge enhancement». Однако надо отдавать себе отчет в том, что применение высококачественного усилителя не улучшает собственно разрешение, этим улучшается только четкость передачи границ черного и белого, да и то не всегда. Однако есть случай, когда никакие ухищрения современной электроники не позволяют поднять полосу пропускания видеосигнала выше 3,8 МГц. Это композитный цветной видеосигнал. Поскольку сигнал цветности передается на поднесущей (в стандарте PAL на частоте около 4,43 МГц), то сигнал яркости принудительно ограничивается полосой 3,8 МГц. (Строго говоря, стандарт предполагает применение гребенчатых фильтров для разделения сигналов цветности и яркости, однако в реальности оборудование имеет простые фильтры нижних частот). Это соответствует разрешению около 400 ТВЛ.
Однако надо отдавать себе отчет в том, что применение высококачественного усилителя не улучшает собственно разрешение, этим улучшается только четкость передачи границ черного и белого, да и то не всегда. Однако есть случай, когда никакие ухищрения современной электроники не позволяют поднять полосу пропускания видеосигнала выше 3,8 МГц. Это композитный цветной видеосигнал. Поскольку сигнал цветности передается на поднесущей (в стандарте PAL на частоте около 4,43 МГц), то сигнал яркости принудительно ограничивается полосой 3,8 МГц. (Строго говоря, стандарт предполагает применение гребенчатых фильтров для разделения сигналов цветности и яркости, однако в реальности оборудование имеет простые фильтры нижних частот). Это соответствует разрешению около 400 ТВЛ.
В настоящее время некоторые производители декларируют разрешающую способность своих цветных камер 480 и более ТВЛ и, как правило, не акцентируют внимание на том, что это разрешение реализуется лишь в том случае, если сигнал снимается с Y-C (S-Video) или компонентного (RGB) выхода.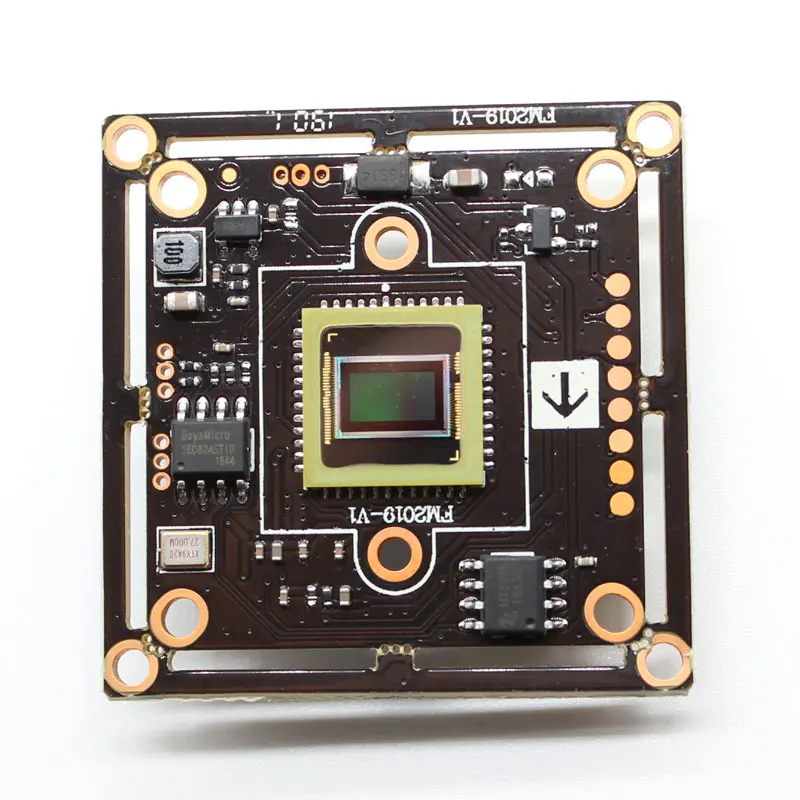 В этом случае сигналы яркости и цветности передаются двумя (Y-C) или тремя (RGB) отдельными коаксиальными кабелями от камеры к монитору. При этом монитор, а также все промежуточное оборудование (коммутаторы, мультиплексоры, видеомагнитофоны и т.д.) также должны обладать входами/выходами типа Y-C (или RGB). В противном случае, единственный промежуточный элемент, обрабатывающий композитный видеосигнал, ограничит полосу пропускания упомянутыми 3,8 МГц и сделает все затраты на дорогие камеры бесполезными.
В этом случае сигналы яркости и цветности передаются двумя (Y-C) или тремя (RGB) отдельными коаксиальными кабелями от камеры к монитору. При этом монитор, а также все промежуточное оборудование (коммутаторы, мультиплексоры, видеомагнитофоны и т.д.) также должны обладать входами/выходами типа Y-C (или RGB). В противном случае, единственный промежуточный элемент, обрабатывающий композитный видеосигнал, ограничит полосу пропускания упомянутыми 3,8 МГц и сделает все затраты на дорогие камеры бесполезными.
Обратите внимание, что параметр «разрешение» имеет отношение не только к ПЗС- матрице в камере, но и ко всем цифровым приборам, как то: мультиплексоры, квадраторы, цифровые синхронизаторы и т.д. Они также ограничивают общее разрешение системы теленаблюдения.
Важно знать, что разрешение системы в целом определяется тем компонентом, который имеет самое низкое разрешение, т. е., если камера имеет разрешение 430 линий, а монитор — 200, то изображение на экране будет воспроизведено с разрешением лишь в 200 линий. Разрешение может меняться при различных условиях освещенности, при низкой освещенности оно обычно снижается.
Разрешение может меняться при различных условиях освещенности, при низкой освещенности оно обычно снижается.
Чувствительность
Чувствительность — еще один важный параметр ТВ камеры. Этот параметр определяет качество работы камеры при низкой освещенности. Производители по-разному трактуют это понятие. Чаще всего под чувствительностью понимают минимальную освещенность на объекте (scene illumination), при которой можно различить переход от черного к белому, но иногда подразумевают минимальную освещенность на матрице (image illumination). С теоретической точки зрения правильнее было бы указывать освещенность на матрице, т. к. в этом случае не нужно оговаривать характеристики используемого объектива. Но пользователю при подборе камеры удобней работать с освещенностью на объекте, которую он заранее знает (или может измерить). Поэтому обычно указывают минимальную освещенность на объекте, измеренную в стандартизированных условиях: коэффициент отражения объекта 0. 75 и светосила объектива 1.4.
75 и светосила объектива 1.4.
Формула, связывающая освещенность на объекте и на матрице, приведена ниже:
Iimаge=Iscene*R/(n*F2), где
Iimаge – освещенность на ПЗС — матрице,
Iscene – освещенность на объекте,
R – коэффициент отражения объекта (см. таблицу 1),
F – светосила объектива
| Объект | Коэффициент отражения (%) |
| снег | 90 |
| белая краска | 75-90 |
| стекло | 70 |
| автостоянка с автомобилями | 40 |
| кирпич | 35 |
| бетон | 25-30 |
| трава, деревья | 20 |
| человеческое лицо | 15-25 |
Единица измерения чувствительности — люкс. Значения минимальной освещенности на матрице и на объекте отличаются, как правило, больше, чем в 10 раз. Например, если указано, что минимальная освещенность на матрице равна 0,01 люкс, то это значит, что при объективе F1.4 минимальная освещенность объекта — 0,1 люкс, а это — среднее значение для современной ТВ камеры. Известные фирмы в паспортах и каталогах обычно ставят значения освещенности именно на объекте. Производители же среднего уровня стремятся выделить свою продукцию за счет более привлекательных характеристик чувствительности, при этом, как правило, “забывая” указывать, что измерения проводились на матрице. Но даже эти данные не дадут вам ясной картины о чувствительности, еще есть много факторов, влияющих на результаты измерений.
Значения минимальной освещенности на матрице и на объекте отличаются, как правило, больше, чем в 10 раз. Например, если указано, что минимальная освещенность на матрице равна 0,01 люкс, то это значит, что при объективе F1.4 минимальная освещенность объекта — 0,1 люкс, а это — среднее значение для современной ТВ камеры. Известные фирмы в паспортах и каталогах обычно ставят значения освещенности именно на объекте. Производители же среднего уровня стремятся выделить свою продукцию за счет более привлекательных характеристик чувствительности, при этом, как правило, “забывая” указывать, что измерения проводились на матрице. Но даже эти данные не дадут вам ясной картины о чувствительности, еще есть много факторов, влияющих на результаты измерений.
Измерения проводятся при помощи люксметра. Если телекамера сохраняет необходимые параметры изображения при освещенности объекта в 0,1 люкса, можно утверждать, что ее чувствительность составляет 0,1 люкса. Но при этом необходимо учитывать следующее : уровень сигнала ( величина выходного сигнала с камеры равна 1,0 В или же меньше), место измерения (было ли проведено измерение уровня освещенности непосредственно на матрице ПЗС, либо на объекте), использовался ли объектив (если да, каково относительное отверстие), отражательную способность тестируемого объекта. Вот почему для проведения подобных измерений необходимо использовать специальную комнату.
Вот почему для проведения подобных измерений необходимо использовать специальную комнату.
По сравнению с человеческим глазом чувствительность монохромных ТВ камер существенно сдвинута в инфракрасную область. Это обстоятельство позволяет при недостаточной освещенности использовать специальные инфракрасные прожекторы. Инфракрасное излучение не видно человеческому глазу, но прекрасно фиксируется ТВ камерами на ПЗС.
Для цветных ТВ камер характерны значительно меньшая чувствительность по сравнению с монохромными и отсутствие чувствительности в инфракрасной области спектра.
Чувствительность большинства современных монохромных ТВ камер — порядка 0.01 — 1 люкс (при F1.2). Наиболее чувствительные камеры могут использоваться для ночных наблюдений без ИК — подсветки.
Для эффективной работы таких камер вполне достаточно лунного света (см. таблицу 2).
| Условия освещения | Освещенность объекта, Лк |
| безоблачный, солнечный день (угол солнца 55°) | более 100 000 |
| солнечный день, с легкими облаками | 70 000 |
| пасмурный день | 20 000 |
| раннее утро | 500 |
| сумерки | 4 |
| ясная ночь, полная луна | 0. 2 2 |
| ясная ночь, неполная луна | 0.02 |
| ночь, луна в облаках | 0.007 |
| ясная, безлунная ночь | 0.001 |
| безлунная ночь с легкими облаками | 0.0007 |
| в помещении без окон | 100 — 200 |
| хорошо освещенные помещения, офисы | 200 — 1000 |
| ночь, луна в облаках | 0.007 |
Технические подробности
Особого упоминания заслуживают сверхвысокочувствительные ТВ камеры, фактически, являющие собой комбинацию обычной ТВ камеры и прибора ночного видения (например, электронно-оптического преобразователя — ЭОП). Подобные камеры обладают не только уникальными свойствами (чувствительность их во 100 — 10 000 раз выше обычных, причем в инфракрасном диапазоне теплое человеческое тело само светится), но и уникальной капризностью: среднее время наработки на отказ составляет около одного года, причем камеры не следует включать днем. Рекомендуется даже закрывать их объектив, чтобы предохранить от выгорания катод ЭОП. Как минимум, следует устанавливать объективы с диапазоном автоматической диафрагмы до 1000 или более. Во время работы камеру необходимо регулярно чуть-чуть поворачивать, чтобы избежать «прожога » изображения. Для этого применяют специальные двух координатные устройства управления, которые постоянно перемещаются вверх- вниз, влево- вправо. Разумеется, если вам необходимо полностью скрытое видеонаблюдение, которое злоумышленник, экипированный ночными прицелами, не смог бы обнаружить, альтернативы ТВ камерам с ЭОП нет. Во всех же остальных случаях десять обычных камер, даже с ИК — прожекторами, будут дешевле одной «ночной».
Рекомендуется даже закрывать их объектив, чтобы предохранить от выгорания катод ЭОП. Как минимум, следует устанавливать объективы с диапазоном автоматической диафрагмы до 1000 или более. Во время работы камеру необходимо регулярно чуть-чуть поворачивать, чтобы избежать «прожога » изображения. Для этого применяют специальные двух координатные устройства управления, которые постоянно перемещаются вверх- вниз, влево- вправо. Разумеется, если вам необходимо полностью скрытое видеонаблюдение, которое злоумышленник, экипированный ночными прицелами, не смог бы обнаружить, альтернативы ТВ камерам с ЭОП нет. Во всех же остальных случаях десять обычных камер, даже с ИК — прожекторами, будут дешевле одной «ночной».
Отношение сигнал/шум
С чувствительностью тесно связан параметр «отношение сигнал / шум» (S/N = signal to noise). Эта величина измеряется в децибелах.
S/N =20*log (видеосигнал/шум)
Например, сигнал/шум, равный 60 дБ, означает, что амплитуда сигнала в 1000 раз больше шума. При параметрах сигнал/шум 50 дБ и более на мониторе будет видна чистая картинка без видимых признаков шума. При 40 дБ иногда заметны мелькающие точки, а при 30 дБ — «снег» по всему экрану, 20 дБ — изображение практически неприемлемо, хотя крупные контрастные объекты через сплошную «снежную» пелену разглядеть еще можно.
При параметрах сигнал/шум 50 дБ и более на мониторе будет видна чистая картинка без видимых признаков шума. При 40 дБ иногда заметны мелькающие точки, а при 30 дБ — «снег» по всему экрану, 20 дБ — изображение практически неприемлемо, хотя крупные контрастные объекты через сплошную «снежную» пелену разглядеть еще можно.
В данных, приводимых в описаниях камер, указываются значения сигнал/шум для оптимальных условий, например, при освещенности на матрице 10 люкс и при выключенной автоматической регулировке усиления и гамма — коррекции. По мере уменьшения освещенности сигнал становится меньше, а шум, вследствие действия АРУ и гамма коррекции, больше.
Технические подробности
Нередко чувствительность камеры указывают для «приемлемого сигнала», под которым подразумевается такой сигнал, при котором отношение сигнал/шум составляет 24 дБ. Это эмпирически определенное предельное значение отношения сигнал / шум, при котором изображение еще можно записывать на видеопленку и надеяться при воспроизведении что-то увидеть.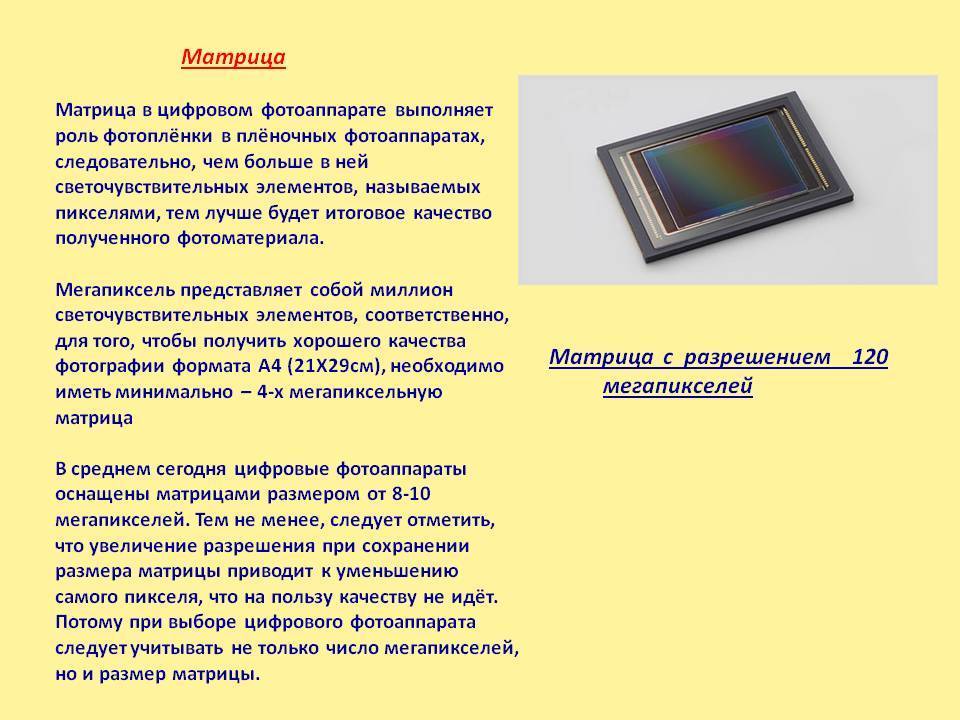
Другой способ определения «приемлемого» сигнала – шкала IRE (Institute of Rаdio Engineers). Полный видеосигнал (0,7 вольта без синхросмеси) принимается за 100 единиц IRE. «Приемлемым» считается сигнал около 30 IRE. Некоторые производители, например BURLE, “приемлемым” указывают сигнал 25 IRE, другие — 50 IRE (уровень сигнала — 6дБ). Выбор «приемлемого» уровня определяется отношением «сигнал/шум». Усилить электронный сигнал нетрудно, но и шум усилится тоже. Наибольшей чувствительностью среди ПЗС — матриц массового применения обладают Hyper-CAD матрицы Sony, имеющие микролинзу на каждой светочувствительной ячейке. Именно они применяются в большинстве ТВ камер высокого качества. Разброс приводимых параметров камер, построенных на их основе, означает разный подход производителей к определению понятия «приемлемый сигнал».
Дополнительная проблема связана с тем, что единица измерения «люкс» определена для монохромного излучения с длиной волны 550 нм. Поэтому немаловажная характеристика — спектральная зависимость чувствительности видеокамеры. В большинстве случаев чувствительность монохромных камер существенно (по сравнению с человеческим глазом) сдвинута в инфракрасный диапазон. У некоторых модификаций чувствительность в ближней инфракрасной области даже выше, чем в видимой. Эти камеры предназначены для работы с инфракрасными прожекторами. Спектральная чувствительность цветных камер практически совпадает с человеческим глазом.
В большинстве случаев чувствительность монохромных камер существенно (по сравнению с человеческим глазом) сдвинута в инфракрасный диапазон. У некоторых модификаций чувствительность в ближней инфракрасной области даже выше, чем в видимой. Эти камеры предназначены для работы с инфракрасными прожекторами. Спектральная чувствительность цветных камер практически совпадает с человеческим глазом.
Автодиафрагма
В течение суток освещенность на контролируемом объекте, как правило, претерпевает существенные изменения. Для поддержания на постоянном уровне количества света на матрице используют встроенный в камеру автоматический электронный затвор (electronic shutter) или объектив с автодиафрагмой (autoiris).
Объективы с автоматической диафрагмой поддерживают освещенность матрицы на постоянном уровне, изменяя величину относительного отверстия. Диафрагма объектива, подобно зрачку человеческого глаза, при высокой освещенности сужается, пропуская меньше света, а при низкой освещенности расширяется. Это позволяет получить сигнал от видеокамеры с хорошей контрастностью, без засветки или затемнения.
Это позволяет получить сигнал от видеокамеры с хорошей контрастностью, без засветки или затемнения.
В системах наружного наблюдения рекомендуется использовать объективы с автоматической диафрагмой, так как в этом случае удается получить необходимый эффект при уровнях освещенности более 80 000 лк.
Автоматический электронный затвор
Автоматический электронный затвор, функциональный аналог выдержки фотоаппарата, обеспечивает компенсацию изменения уровня освещенности и постоянную среднюю яркость изображения. Это достигается за счет изменения времени накопления фотозаряда и, как следствие, амплитуды видеосигнала. Скорость переключения затвора (время накопления) может достигать до 1/100000 секунды. Стоимость объективов без диафрагмы значительно ниже стоимости объективов с автодиафрагмой, и применение телекамер с электронным затвором позволяет экономить в некоторых случаях значительные суммы, т.к. с этими камерами можно использовать объективы с ручной диафрагмой. Высокочувствительные камеры вместе с объективами без диафрагмы рекомендуется использовать только внутри помещений, так как диапазона перекрытия электронного затвора недостаточно, чтобы отработать изменение освещенности «на улице». Использование электронного затвора также улучшает наблюдение за быстро перемещающимися объектами.
Высокочувствительные камеры вместе с объективами без диафрагмы рекомендуется использовать только внутри помещений, так как диапазона перекрытия электронного затвора недостаточно, чтобы отработать изменение освещенности «на улице». Использование электронного затвора также улучшает наблюдение за быстро перемещающимися объектами.
Применение объективов с автодиафрагмой предпочтительнее в следующих случаях:
- когда телекамера работает в условиях сильно меняющейся освещенности;
- когда требуется максимальная глубина резкости, которая достигается при максимально закрытой диафрагме объектива;
- когда необходимо более четко передать границы ярких объектов
Встроенный видеодетектор для управления диафрагмой
В настоящее время встроенный видеодетектор для управления диафрагмой становится стандартным для всех камер. Изначально разработанный для автоматических диафрагм, видеодетектор теперь помещается непосредственно на плату камеры. Это позволяет применять объективы без усиления или объективы с диафрагмой типа DC (стоимость их несколько ниже). Это также позволяет стандартизировать разъемы для подсоединения автодиафрагмы объектива к камере. В камере используется 4-х выводной разъем, и многие объективы поставляются с ответными разъемами. Естественно, такое решение снимает проблему стыковки соответствующих клемм и делает процесс установки объектива более простым и быстрым.
Это позволяет применять объективы без усиления или объективы с диафрагмой типа DC (стоимость их несколько ниже). Это также позволяет стандартизировать разъемы для подсоединения автодиафрагмы объектива к камере. В камере используется 4-х выводной разъем, и многие объективы поставляются с ответными разъемами. Естественно, такое решение снимает проблему стыковки соответствующих клемм и делает процесс установки объектива более простым и быстрым.
Синхронизация камеры
Недостатком некоторых систем видеонаблюдения является плавающее и дрожащее изображение. Для ликвидации этого недостатка выполняется принудительная синхронизация телекамер и устройств обработки видеосигнала. Известно несколько способов синхронизации, одним из которых является синхронизация всех камер от одного источника сигнала. Это позволяет получить качественное изображение в момент переключения камер, устранить скачки и дрожание изображения.
Вариант синхронизации LINE LOCK
Описываемый вариант синхронизации может быть выполнен только с камерами, питающимися переменным током, так как в этом случае синхронизация всех камер осуществляется от питающего напряжения. Это возможно только в том случае, если питание камер происходит от одного источника переменного тока. Поэтому, пока ток в сети синфазный, синхронизация системы будет обеспечена. Если же разные камеры подключены к различным фазам, возникает необходимость их согласования по питанию и настройке фазы для каждой камеры в отдельности. Существуют специальные устройства фазирования / синхронизации для проведения работ по настройке и синхронизации камер в режиме line lock..
Это возможно только в том случае, если питание камер происходит от одного источника переменного тока. Поэтому, пока ток в сети синфазный, синхронизация системы будет обеспечена. Если же разные камеры подключены к различным фазам, возникает необходимость их согласования по питанию и настройке фазы для каждой камеры в отдельности. Существуют специальные устройства фазирования / синхронизации для проведения работ по настройке и синхронизации камер в режиме line lock..
Внешняя синхронизация
Такой вариант синхронизации предполагает использование внешнего опорного источника сигнала. Затем этот сигнал распределяется на каждую камеру посредством специального коаксиального кабеля. Опорный сигнал может быть сформирован генератором синхросигналов. Также в качестве опорного сигнала может быть использован сигнал с видеовыхода одной из камер. Такие варианты предполагают применение дополнительных соединений и кабелей, однако, являются единственными способами осуществления синхронизации для камер с питанием постоянного тока, которые не могут быть синхронизированы по питанию (Line Lock).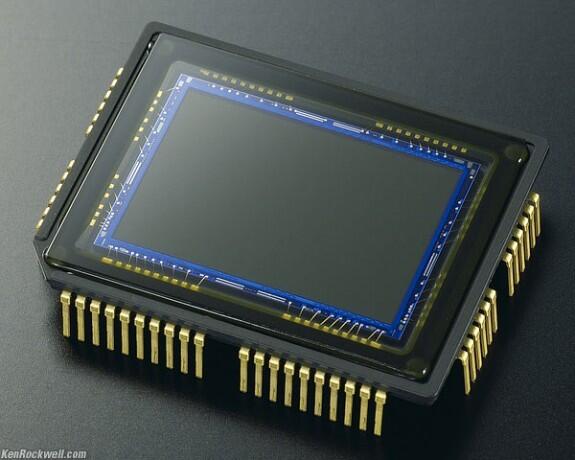 Некоторые устройства переключения (свитчеры), определенные виды мультиплексоров также требуют для работы камер, синхронизированных по внешнему источнику опорного сигнала. В том случае, когда описанные выше варианты синхронизации не применяются, осуществляется внутренняя кварцевая синхронизация камеры.
Некоторые устройства переключения (свитчеры), определенные виды мультиплексоров также требуют для работы камер, синхронизированных по внешнему источнику опорного сигнала. В том случае, когда описанные выше варианты синхронизации не применяются, осуществляется внутренняя кварцевая синхронизация камеры.
Объективы для ТВ-камер
- Фокусное расстояние
Фокусное расстояние объектива указывается в миллиметрах и при прочих равных условиях определяет угол зрения. Более широкий угол обеспечивается меньшим фокусным расстоянием. И, наоборот — чем фокусное расстояние больше, тем меньше угол зрения объектива. Нормальный же угол зрения ТВ камеры эквивалентен, углу зрения человека, при этом объектив имеет фокусное расстояние, пропорциональное размеру диагонали матрицы ПЗС.
Исходя из выше сказанного, объективы принято делить на нормальные, короткофокусные (широкоугольные), длиннофокусные (телеобъективы).
Объективы, фокусное расстояние которых может изменяться более чем в 6 раз, называются ZOOM–объективами (объективами с трансфокатором).
 Данный класс объективов применяется при необходимости детального просмотра объекта, удаленного от камеры. Например, при использовании ZOOM–объектива с десятикратным увеличением, объект, находящийся на расстоянии 100 м, будет наблюдаться как объект, удаленный на расстоянии 10 м. Наиболее часто используются ZOOM–объективы, оборудованные электроприводами для управления диафрагмой, фокусировкой и увеличением (motorized zoom). Управление камерой, оборудованной данным объективом, оператор может осуществлять с удаленного поста.
Данный класс объективов применяется при необходимости детального просмотра объекта, удаленного от камеры. Например, при использовании ZOOM–объектива с десятикратным увеличением, объект, находящийся на расстоянии 100 м, будет наблюдаться как объект, удаленный на расстоянии 10 м. Наиболее часто используются ZOOM–объективы, оборудованные электроприводами для управления диафрагмой, фокусировкой и увеличением (motorized zoom). Управление камерой, оборудованной данным объективом, оператор может осуществлять с удаленного поста. - Относительное отверстие
Обычно объектив имеет два значения относительного отверстия (1:F) или апертуры. Максимальное значение F — минимальное значение F; полностью открытая диафрагма —F минимально, максимальное F —– диафрагма закрыта. Значение F влияет на выходное изображение. Малое F означает, что объектив пропускает больше света, соответственно, камера лучше работает в темное время суток. Объектив с F необходим, при высоком уровне освещенности или отражения.
Такой объектив будет препятствовать “ослеплению” камеры, обеспечивая постоянный уровень сигнала. Все объективы с автодиафрагмой используют фильтр нейтральной плотности для увеличения максимального F. Апертура (F) влияет так же и на глубину резкости. - Глубина резкости
Глубина резкости показывает, какая часть поля зрения находится в фокусе. Большая глубина резкости означает, что большая часть поля зрения находится в фокусе (при закрытой диафрагме возможно достижение бесконечной глубины резкости). Малая же глубина резкости позволяет наблюдать в фокусе лишь небольшой фрагмент поля зрения. На глубину резкости влияют определенные факторы. Так, объективы с широким углом зрения обеспечивают, как правило, большую глубину резкости. Высокое значение F свидетельствует также о большей глубине резкости. Наименьшая глубина резкости возможна ночью, когда диафрагма полностью открыта (поэтому объектив, сфокусированный в дневное время, ночью могут оказаться расфокусированным).
- Автоматическая и ручная диафрагма
В условиях переменной освещенности рекомендуется использовать объективы с автодиафрагмой. Объективы с ручной диафрагмой в основном используются для помещений, где уровень освещенности постоянный. С появлением камер с электронным ирисом, появилась возможность использования объективов с ручной диафрагмой в условиях переменной освещенности. Однако необходимо учитывать, что при полностью открытой диафрагме в условиях плохой освещенности, значение F становится критичным, глубина резкости совсем незначительной, что затрудняет достижение необходимой фокусировки в дневное время. Камера может поддерживать постоянный уровень видеосигнала, но не может влиять на глубину резкости. При полностью закрытой диафрагме глубина резкости увеличивается, однако это приводит к снижению чувствительности камеры.
- Видео управление и непосредственное управление
Объектив с автодиафрагмой служит для достижения требуемого качества изображения.
Видео–управление представляет собой электронную схему видеодетектора, преобразующего видеосигнал в сигнал управления двигателем диафрагмы. Объективы с непосредственным управлением содержат усилитель постоянного тока и электродвигатель диафрагмы, сигнал управления поступает с камеры. Решающим фактором в выборе типа объектива является тип выхода управления на камере. Современные камеры имеют в большинстве случаев оба типа выхода. - C и CS крепление
Современные ТВ камеры и объективы имеют, как правило, крепления типа CS. К камере с посадочным местом «CS — типа» крепятся объективы «CS — типа». С помощью дополнительного переходного кольца на камеру с посадочным местом «CS — типа» можно установить объектив «С — типа». Кольцо устанавливается между камерой и объективом. Камера с посадочным местом «C — типа» несовместима с объективом «CS- типа» — невозможно получить сфокусированное изображение.
 Данный класс объективов применяется при необходимости детального просмотра объекта, удаленного от камеры. Например, при использовании ZOOM–объектива с десятикратным увеличением, объект, находящийся на расстоянии 100 м, будет наблюдаться как объект, удаленный на расстоянии 10 м. Наиболее часто используются ZOOM–объективы, оборудованные электроприводами для управления диафрагмой, фокусировкой и увеличением (motorized zoom). Управление камерой, оборудованной данным объективом, оператор может осуществлять с удаленного поста.
Данный класс объективов применяется при необходимости детального просмотра объекта, удаленного от камеры. Например, при использовании ZOOM–объектива с десятикратным увеличением, объект, находящийся на расстоянии 100 м, будет наблюдаться как объект, удаленный на расстоянии 10 м. Наиболее часто используются ZOOM–объективы, оборудованные электроприводами для управления диафрагмой, фокусировкой и увеличением (motorized zoom). Управление камерой, оборудованной данным объективом, оператор может осуществлять с удаленного поста. Такой объектив будет препятствовать “ослеплению” камеры, обеспечивая постоянный уровень сигнала. Все объективы с автодиафрагмой используют фильтр нейтральной плотности для увеличения максимального F. Апертура (F) влияет так же и на глубину резкости.
Такой объектив будет препятствовать “ослеплению” камеры, обеспечивая постоянный уровень сигнала. Все объективы с автодиафрагмой используют фильтр нейтральной плотности для увеличения максимального F. Апертура (F) влияет так же и на глубину резкости.
 Видео–управление представляет собой электронную схему видеодетектора, преобразующего видеосигнал в сигнал управления двигателем диафрагмы. Объективы с непосредственным управлением содержат усилитель постоянного тока и электродвигатель диафрагмы, сигнал управления поступает с камеры. Решающим фактором в выборе типа объектива является тип выхода управления на камере. Современные камеры имеют в большинстве случаев оба типа выхода.
Видео–управление представляет собой электронную схему видеодетектора, преобразующего видеосигнал в сигнал управления двигателем диафрагмы. Объективы с непосредственным управлением содержат усилитель постоянного тока и электродвигатель диафрагмы, сигнал управления поступает с камеры. Решающим фактором в выборе типа объектива является тип выхода управления на камере. Современные камеры имеют в большинстве случаев оба типа выхода. Источник: из книги «Системы телевизионного наблюдения» авторов Никулина О. Ю., Петрушина А.Н.
Ю., Петрушина А.Н.
Машинные системы камер — Matrix Design Group
МАШИННЫЕ КАМЕРНЫЕ СИСТЕМЫ
Для одной или нескольких камер
Компания Matrix предлагает пользователям мобильного оборудования несколько вариантов машинных камер и систем отображения в кабине. Эти системы предлагают операторам расширенные возможности визуального наблюдения за персоналом и другим оборудованием в рабочей зоне.
Все камеры и мониторы подходят для подземного (одобрено MSHA) и наземного использования, а корпуса разработаны для самых тяжелых условий горнодобывающей промышленности.
- Системы с одной или двумя камерами
- Одобрено MSHA для подземных работ
- Регулируемые системы, не одобренные MSHA, для наземных и внешних операций
- В наличии и готов к отправке
МАТРИЦА
Новости
Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее Подробнее ПодробнееСтереокамера — Kornia
Переключить боковую панель оглавления
В этом модуле мы предоставляем StereoCamera , которая содержит функции для работы с горизонтальной установкой стереокамеры.
Предполагается, что установка горизонтальной стереокамеры откалибрована и исправлена таким образом, что установка может быть описана двумя матрицами камеры:
левая выпрямленная матрица камеры :
\[\begin{split}P_0 = \begin{bmatrix} fx&0&cx&0\ 0 & fy & cy & 0 \\ 0 и 0 и 1 и 0 \end{bmatrix}\end{split}\]
Правая выпрямленная камера Матрица :
\[\begin{split}P_1 = \begin{bmatrix} fx&0&cx&tx*fx\ 0 & fy & cy & 0 \\ 0 и 0 и 1 и 0 \end{bmatrix}\end{split}\]
- где:
\(fx\) — фокусное расстояние по оси x в пикселях.
\(fy\) — фокусное расстояние по оси Y в пикселях.
\(cx\) — координата x главной точки в пикселях.
\(cy\) — координата y главной точки в пикселях.
\(tx\) — горизонтальная базовая линия в метрических единицах.

Эти матрицы камеры получаются путем калибровки настройки стереокамеры, которую можно выполнить в OpenCV.
Стереокамера позволяет преобразовывать карты диспаратности в трехмерную геометрию реального мира, представленную облаком точек.
Это делается путем формирования матрицы \(Q\).
Использование модели камеры-обскуры для проекции \([X Y Z 1]\) в мировых координатах на \(uv\) пикселей в левом и правом кадре камеры соответственно:
\[\begin{split}\begin{bmatrix} у \\ в \\ 1 \end{bmatrix} = P_0 * \begin{bматрица} ИКС \\ Y\\ З \\ 1 \end{bmatrix} \\ \begin{bматрица} у-д \\ в \\ 1 \end{bmatrix} = P_1 * \begin{bmatrix} ИКС \\ Y\\ З \\ 1 \end{bmatrix}\end{split}\]
Где \(d\) — разница между пикселями левого и правого изображения.
Объединив эти два выражения, запишем это как одно матричное умножение
\[\begin{split}\begin{bmatrix} у \\ в \\ у-д \\ 1 \end{bmatrix} = \begin{bmatrix} fx & 0 & cx_{left} & 0 \\ 0 & fy & cy & 0 \\ fx & 0 & cx_ {право} & fx * tx \\ 0 и 0 и 1 и 0 \end{bmatrix} \begin{bmatrix} ИКС \\ Y\\ З \\ 1 \end{bmatrix}\end{split}\]
Теперь из третьей строки вычтите первое и инвертируйте выражение, и вы получите:
\[\begin{split}\begin{bmatrix} у \\ в \\ д\ 1 \end{bmatrix} = \begin{bmatrix} fy*tx&0&0&-fy*cx*tx\ 0&fx*tx&0&-fx*cy*tx\ 0&0&0&fx*fy*tx\ 0 & 0 & -fy & fy * (cx_{слева} -cx_{справа}) \end{bmatrix} \begin{bmatrix} ИКС \\ Y\\ З \\ 1 \end{bmatrix}\end{split}\]
Где \(Q\) равно
\[\begin{split}Q = \begin{bmatrix} fy*tx&0&0&-fy*cx*tx\ 0&fx*tx&0&-fx*cy*tx\ 0&0&0&fx*fy*tx\ 0 & 0 & -fy & fy * (cx_{слева} -cx_{справа}) \end{bmatrix}\end{split}\]
Обратите внимание, что x-координата главной точки в левой и правой камерах \(cx\) может различаться, что здесь принимается во внимание.
Предполагая, что \(fx = fy\) вы можете уменьшить это до:
\[\begin{split}Q = \begin{bmatrix} 1&0&0&-cx\\ 0 & 1 & 0 & -cy \\ 0 & 0 & 0 & fx \\ 0 & 0 & -1/tx & (cx_{left} -cx_{right} / tx) \end{bmatrix}\end{split}\]
Но мы будем использовать общую матрицу \(Q\).
Используя матрицу \(Q\), мы можем получить 3D точки:
\[\begin{split}\begin{bmatrix} ИКС \\ Y\\ З \\ Вт \end{bmatrix} = Q * \begin{bmatrix} у \\ в \\ несоответствие (y, v) \\ г \end{bmatrix}\end{split}\]
- класс kornia.geometry.camera.stereo.StereoCamera( rectified_left_camera , rectified_right_camera )[источник]
- __init__( rectified_left_camera , rectified_right_camera )[источник]
Класс, представляющий установку горизонтальной стереокамеры.
- Параметры
rectified_left_camera (
Tensor) — Выпрямленная матрица проекции левой камеры формы \((B, 3, 4)\)rectified_right_camera (
Tensor) — Выпрямленная проекционная матрица правой камеры формы \((B, 3, 4)\)
- свойство Q : факел. Тензор
Матрица Q горизонтальной стереоустановки.
Эта матрица используется для преобразования тензора диспаратности в соответствующее облако точек. Обратите внимание, что это в общей форме, которая допускает различные фокусные длины в направлениях x и y.
- Тип возврата
Тензор- Возвращает
Матрица Q формы \((B, 4, 4)\).
- свойство batch_size : int
Вернуть размер партии хранилища.
- Тип возврата
внутр.- Возвращает
скаляр с размером пакета
- свойство cx_left : torch.Tensor
Возвращает x-координату главной точки для левой камеры.
- Тип возврата
Тензор- Возвращает
тензор формы \((B)\)
- свойство cx_right : torch. Tensor
Возвращает x-координату главной точки для правой камеры.
- Тип возврата
Тензор- Возвращает
тензор формы \((B)\)
- свойство cy : torch.Tensor
Возвращает координату Y главной точки.
Обратите внимание, что координата y главных точек считается одинаковым для левой и правой камеры.
- Тип возврата
Тензор- Возвращает
тензор формы \((B)\)
- свойство fx : факел.Тензор
Возвращает фокусное расстояние в направлении x.
Обратите внимание, что фокусные расстояния выпрямленного левого и правого камеры считаются равными.
- Тип возврата
Тензор- Возвращает
тензор формы \((B)\)
- свойство fy : torch. Tensor
Возвращает фокусное расстояние по оси Y.
Обратите внимание, что фокусные расстояния выпрямленного левого и правого камеры считаются равными.
- Тип возврата
Тензор- Возвращает
тензор формы \((B)\)
- reproject_disparity_to_3D ( disparity_tensor ) [источник]
Преобразование тензора диспаратности в трехмерное облако точек.
- Параметры
disparity_tensor (
Tensor) – Тензор несоответствия формы \((B, 1, H, W)\).- Тип возврата
Тензор- Возвращает
Трехмерное облако точек формы \((B, H, W, 3)\)
- свойство tx : torch.Tensor
Горизонтальная базовая линия между двумя камерами.
- Тип возврата
Тензор- Возвращает
Тензор формы \((B)\)
 Тензор
Тензор  Tensor
Tensor  Tensor
Tensor - kornia.
