
Нодальная точка: Как определить нодальную точку
Как определить нодальную точку
У каждого фотообъектива и камеры есть так называемая нодальная точка. По сути это одна точка по центру оптического объектива, в которой увеличение по углу приравнивается к отметке 1. Как найти такую отметку на своем фотоаппарате? Фотопоиск поможет вам в этом.
Многие фотографы о таких вещах даже и не задумываются, и не сталкиваются. Поскольку такая задача возникает только у тех, кто снимает большие открытые пространства. Чтобы не заморачиваться фотографы любители используют широкоэкранные объективы, которые скажем вам, далеки от создания идеальных фотоснимков. На картинке получаются то углы завернутые, то детали размытые, то нет единого центра.
Только фотографы перфекционисты будут заинтересованы поиском нодальной точки. Сегодня, пожалуй, это самый сложный вопрос, ответ на который вызывает массу протестов и противоречий у различных профессиональных фотографов. Кто-то считает, что нодальная точка находится где-то в объективе. У других экспертов мнения сходятся на том, что она висит в пространстве впереди и позади объектива. Сторонники использования зум-объективов, заявляют отрицают все и заявляют, что она вовсе располагается в другом месте, ни в объективе, и ни в пространстве. Так, где же находится нодальная точка? Для чего она нужна?
Сторонники использования зум-объективов, заявляют отрицают все и заявляют, что она вовсе располагается в другом месте, ни в объективе, и ни в пространстве. Так, где же находится нодальная точка? Для чего она нужна?
В процессе создания качественной панорамной съемки без определения нодальной точки просто не обойтись. Если ваша камера поворачивается во время съемки относительно этой точки, то и объекты будут сбалансированно располагаться вдоль единого центра на плоскости. Если у вас нет такого центра фокусировки, то и объекты в кадре будут иметь искажения и дефекты. Мы молчим о появлении эффекта параллакса, который всегда возникает в подобных случаях.
Панорамные фотографы в поисках ответа испробовали различные техники и только путем личных наблюдений пришли к таком выводу, что нодальная точка определяется индивидуальным путем под отдельную камеру и место съемки. Согласно этому выводу мы провели небольшой эксперимент как лучше найти нодальную точку. Делимся своими наблюдениями с вами!
Для эксперимента:
— крепим фотокамеру к панорамной головке, которая установлена на штатив. Штатив мы выровняли по уровню.
Штатив мы выровняли по уровню.
— соблюдая строгую вертикаль, опускаем камеру таким образом, чтобы объектив, а именно его центр, смотрел на центр ротатора головки для панорамы. У нас она сферическая. Если же у вас имеется только однорядная головка, то этот шаг выполнять не следует.
— Регулируем горизонтальное положение фотокамеры с помощью винтов так, чтобы диафрагма расположилась над центром ротатора. Для определения ее положения на объективе — совместите центральную ось на ротаторе с серединой объектива.
— дальше располагаем два небольших предмета напротив камеры. В нашем случае это две линейки. Первую линейку мы располагает вертикально в полуметре от фокуса объектива, вторую устанавливаем через 3 метра от первой линейки. Обе линейки у нас располагаются на одной линии с центром объектива.
— тестируем камеру. Совершая повороты максимально влево и вправо, отмечаем для себя как теперь видно линейки. Видно ли теперь вторую, заднюю, линейку за первой перед видоискателем? Если положение наших предметов изменяется при вращении камеры, значит, ось поворота не совпадает с нодальной точкой. Что делать?
Что делать?
— оставляем камеру в последнем положении и перемещаем ее вдоль объектива, чтобы вторая линейка пряталась за первой. Проверяем заново наш трюк — видно или не видно?
Итак, шаманим пока не добьемся того, чтобы при условии поворота камеры задняя линейка находилась четко за ближней. Таким образом, и определяем нахождение нодальной точки с точностью до 0,5 мм.
Надеемся, наш эксперимент будет вам полезен. Не ставьте для себя рамки, экспериментируйте, тестируйте свою технику и добивайтесь лучших результатов, больше, чем вы уже имеете!
Азы техники изготовления сферических виртуальных панорам
Это архивная статья, собранная из нескольких заметок, написанных в 2006-2007г. В настоящее время отдельные пункты претерпели существенные изменения. Тем не менее, основной ход процесса остался неизменным. Наиболее актуальные моменты дополнены комментариями.Методики создания виртуальных сферических 3D-панорам несколько различаются, главным образом, в зависимости от требуемого качества панорамы на выходе. Тем не менее, в процессе создания полной сферической панорамы можно выделить следующие этапы:
Тем не менее, в процессе создания полной сферической панорамы можно выделить следующие этапы:
1. Выбор фототехники для панорамной фотосъемки
1.1. Сферические панорамные головки: Manfrotto 303SPH, Nodal Ninja 3, Really Right Stuff, 360 Precision Adjuste и 360 Precision Absolute
1.2. Штитивы и уровневые платформы: Manfrotto 438, Manfrotto 555B, Nodal Ninja EZ Leveler, Manfrotto 338
1.3. Объективы: Canon 10-22mm, Sigma 10-20mm, Nikon 10.5mm fisheye, Canon 15mm fisheye, Sigma 15mm fisheye, Sigma 12-24mm, Zenitar 16mm fisheye, Sigma 8mm fisheye, Peleng 8mm fisheye и др.
1.5. Прочие аксессуары для панорамной фотосъемки
2. Собственно фотосъемка
3. Склейка равноугольной проекции панорамы в PTGui
4. Обработка равноугольной проекции в Фотошопе
5. Конвертирование панорамы в кубическую проекцию с помошью Pano2QTV
6. Ретуширование надира и зенита
7. Создание конечных файлов панорамы
7.1. QTVR: Создание виртуальных сферических панорам для просмотрциков DevalVR и QuickTime
7.
 2. Flash: Виртуальные 3D-панорамы на технологии Flash
2. Flash: Виртуальные 3D-панорамы на технологии Flash7.3. PTviewer: Виртуальные сферические панорамы для Java-машины
7.4. Shockwave: Создание виртуальных 3D-панорам для SPi-V-вьювера
7.5. ImmerVision PurePlayer: Создание полноэкранных сферических панорам для Java-машины с помощью REALVIZ Stitcher
8. Демонстрация виртуальных панорам в Интернете, Pano2QTVR HTML-коды для DevalVR, QuickTime, Flash, Shockwave и Java-просмотрщиков
1. Фототехника для панорамной фотосъемки
Для панорамной фотосъемки используемая техника играет ведущую роль. Не смотря на то, что виртуальные сферические 3D-панорамы можно снимать и с рук, использование штатива и специальной панорамной головки является крайне желательным. Особенно это важно на начальном этапе, когда идет отработка навыков. Помимо штатива и панорамной головки, разумеется, нужен будет сам фотоаппарат и объектив, желательно широкоугольник, сверхширокоугольник или объектив типа fisheye.
При некоторых особых методиках для создания виртуальных сферических 3D-панорам также необходимыми элементами будут пузырьковый уровень, «журавлик», отвес и др. , однако для ознакомления с основами техники изготовления 3D-панорам наличие этих аксессуаров не является обязательным.
, однако для ознакомления с основами техники изготовления 3D-панорам наличие этих аксессуаров не является обязательным.
1.1. Панорамные головки
Принципиальным моментом, отличающим панорамные головки от всех других является возможность поворота связки камера-объектив с центром вращения в нодальной точке объектива. Нодальная точка — это то место в объективе, в котором сходятся все лучи перед тем как разойтись на поверхность матрицы или пленки. Для совмещения центра вращения и нодальной точки камера смещается назад от центральной колонны штатива.
Одного ряда кадров, даже в вертикальной (портретной) ориентации фотоаппарата, как правило, недостаточно для того, чтобы замкнуть полную сферу. В этом случае фотосъемка ведется в несколько рядов, такие панорамы (независимо сферическими или плоскими они являются) называются многорядными или мозаичными. Панорамная головка для съемки многорядных панорам должна обладать возможностью наклонять фотоаппарат вверх-вниз, часто требуется осуществлять наклоны вплоть до зенита (вертикально вверх, +90° от горизонта) и надира (вертикально вниз, -90° от горизонта).
Смещение нодальной точки относительно осей вращения фотокамеры на панорамной головке приводит к параллаксу. Что это такое — на практике достаточно просто продемонстрировать следующим оброазом: выбрать разноудаленные предметы, находящиеся на одной линии, и посмотреть на них закрыв один глаз и запомнить процент перекрытия одного другим, потом повернуть голову и посмотреть еще раз. Будет видно, что перекрытие одного другим различно, это происходит из-за того, что нодальная точка глаза не совпадает с позвоночником, т.е. осью вращения головы. Из фотокадров, снятых со занчительным параллаксом, крайне трудно изготовить качественную панораму, времязатраты на точное позиционирование нодальной точки окупятся многократно.
Наиболее распространенными панорамными головками, прозволяющими изготавливать многорядные сферические панорамы являются следующие:
Сферическая панорамная головка Manfrotto 303SPH
Ориентировочная цена: 520$.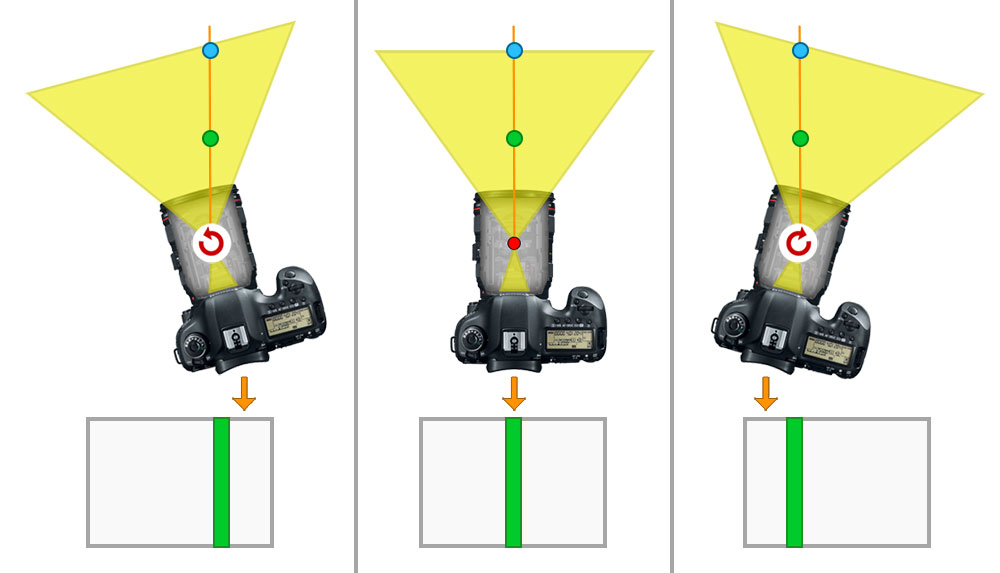
Достоинства: подходит к любым фотокамерам, в т.ч. к профессиональным фотокамерам и фотоаппаратам с батарейным блоком; относительно распространенная панорамная головка — можно «вживую» покрутить в магазине.
Вероятно именно по этой причине с данной модели начинали многие панорамные фотографы.
Недостатки: вес, размеры, слабость горизонтальной рельсы при установке тяжелых фотокамер (исправляется).
См. также: технические характеристики Manfrotto 303SPH на вебсайте производителя, обзор сферической панорамной головки Manfrotto 303SPH.Сферическая панорамная головка Nodal Ninja 3
Ориентировочная цена: 199$
Достоинства: низкая цена, компактные размеры, наименьший вес среди сферических панорамных головок. Недостатки: ограниченная совместимость с фотокамерами (напр., Canon 20D + Canon 10-22mm не поворачивается с ориентацией в зенит).
В настоящее время снята с производства, вместо неё выпускается Nodal Ninja 3 MkII, отличающаяся от первой модели более продвинутым ротатором.
Панорамные головки Precision: 360 Precision Adjuste и 360 Precision Absolute
Достоинства: возможность качественно снимать панорамы с применением темплейтов, надержность.
Недостатки: совместимость с одной единственной связкой камера-объектив (устранено в версии 360 Precision Absolute), вес, размер, цена.
Интернет-магазин Precision360 работает безобразно. Есть ненулевой риск не получить оплаченную посылку, даже если заказ оформлен не из 1/6 части сущи.
Сферическая панорамная головка из набора модульных компонентов RRS (Really Right Stuff)
Ориентировочная цена: 800$ без стоимости платформы для камеры (дополнительно 55…180$)
Достоинства: совместимость со стандартом Arca-Swiss, хорошая устойчивость даже с тяжелыми фотокамерами, наличие разметки для позиционирования нодальной точки.
Недостатки: высокая цена.
См. также: о сферической панорамной головке RRS на вебсайте производителя.
Абсолютное большинство сферических панорамных головок является 2D-головками, т.е. вращение идет в 2-х плоскостях: горизонтальной плоскости, вокруг вертикальной оси, и в продольной плоскости, вокруг горизонтальной оси. Этого достаточно для создания сферических виртуальных 3D-панорам, в т.ч. и многорядных. Имеющаяся у Manfrotto 303SPH третья ось позволяет лишь прецизионно выставлять горизонт на панорамной головке.
1.2. Штативы и уровневые платформы
По поводу штативов сложно давать однозначные рекомендации — очень многое зависит от личных предпочтений. Я сам пользуюсь Manfrotto 055 PROB, он устраивает по устойчивости даже с выдвинутой центральной колонной, рабочей высоте, наличию аксессуаров (шипы, снегоступы, сменные центральные колонны и т.д.), однако транспортировочный размер и вес желательно иметь меньше.
Дополнительным аксессуаром для штативов при панорамной фотосъемке является уровневая платформа. Её задача выставить горизонт вращения панорамной головки. Уровневые платформы особенно необходимы при съемке сферических виртуальных панорам с рыхлого грунта или снега.
Уровневые платформы могут быть чашеобразного и теодолитного типов. Альтернативой использования уровневой платформы может быть установка панорамной головки на обычную шаровую головку, выдерживающую достаточную нагрузку.
Чашеобразная уровневая платформа Manfrotto 438
Существенными недостатками данного решения являются относительно большая масса Manfrotto 438 и малые углы наклона (регламентировано +/-15°, реально — еще меньше). Также мне встречался экземпляр, у которого происходило залипание в крайних углах наклона.
Также мне встречался экземпляр, у которого происходило залипание в крайних углах наклона.
См также о Manfrotto 438 на сайте производителя.
Центральная колонна Manfrotto 555B
Manfrotto 555B является опцией для штативов серии Manfrotto 055. Это уровневая платформа чашеобразного типа, объединенная со сменной центральной колонной штатива Manfrotto 055:
См. также о Manfrotto 555B на сайте производителя.
Уровневая платформа теодолитного типа Nodal Ninja EZ Leveler
Несомненным плюсом уровревой платформы Nodal Ninja EZ Leveler является её цена, составляющая всего 49,95$.
См. также о Nodal Ninja EZ Leveler на вебсайте производителя.
Уровневая платформа теодолитного типа Manfrotto 338
Недостаток — большие размеры (мешают при съемке).
См.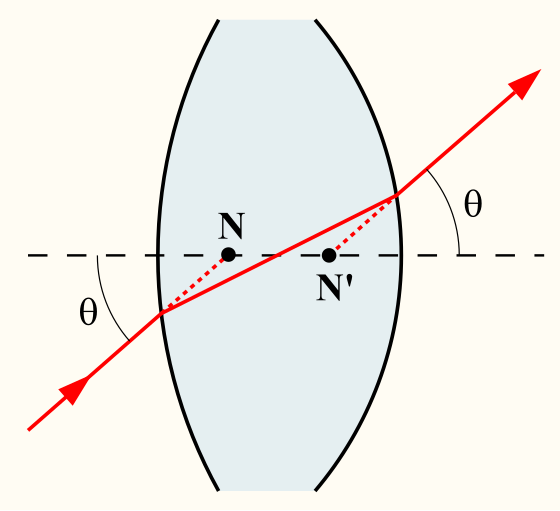 также о Manfrotto 338 на вебсайте производителя.
также о Manfrotto 338 на вебсайте производителя.
1.3. Объективы
В качестве объективов, применяемых для изготовления виртуальных сферических панорам, обычно используются либо сверхширокоугольные объективы-фиксы, либо широкоугольные зум-объективы на кототком конце, либо объективы типа fisheye (фишай, «рыбий глаз»). В данном контексте даже значительная дисторсия fisheye-объективов не является недостатком, т.к. в процессе создания виртуальной сферической панорамы картинка претерпевает несколько последовательных геометрических преобразований. Большее значение следует уделять резкости объектива и его зайцеустойчивости.
На сегодняшний день наиболее популярными объективами для панорамной съемки являются:
Зенитар (Zenitar) 16мм f/2,8 Fisheye
Ориентировочная цена: 125$ + 20$ переходник
Плюсы: бюджетно, достаточно резкий при прикрытой диафрагме, на ФФ можно снимать однорядку. Минусы: разброс качества, низкий контраст.
Минусы: разброс качества, низкий контраст.
См. также: Зенитар (Zenitar) 16мм f/2,8 Fisheye на вебсайте производителя.
Sigma 12-24mm f/4.5-5.6 EX DG
Ориентировочная цена: 590$
Плюсы: подходит для ФФ, где является УЛЬТРАшириком с выправленной дисторсией, есть для разных байонетов. Минусы: относительно невысокие оптические характеристики, есть нарекания на засасывание пыли.
См. также: Sigma 12-24mm f/4.5-5.6 EX DG на вебсайте производителя.
Sigma 15mm f/2.8 EX DG Fisheye
Ориентировочная цена: 410$
Плюсы: на ФФ изумительно резкая, хорошая зайцеустойчивость, есть для разных байонетов. Минусы: не выявлены.
Отличная резкость по всему полю, за исключением самых углов. Крепкий и надежный конструктив.
См. также: Sigma 15mm f/2.8 EX DG Fisheye на вебсайте производителя.
Canon EF 15mm f/2.8 Fisheye
Ориентировочная цена: 700$
Плюсы: на ФФ хорошие углы обзора для сфер высокого разрешения. Минусы: завышенная цена, по некоторым отзывам проигрывает Зенитару по зайцеустойчивости и резкости.
У линзы хорошая равномерность резкости по всему полю, включая углы. В настоящее время снята с производства.
Nikon 10.5mm f/2.8G ED DX Fisheye
Ориентировочная цена: 750$
Плюсы: крайне интересные углы обзора, на ФФ и кропе х1,3 сферу можно замыкать из 3-х кадров. Минусы: при использовании на ФФ нодальная точка на больших углах смещается, зайцеловкость, только никоновский байонет (на Canon встает через адаптер).
Относительно хлипкий конструктив. Для установки на ФФ требуется спиливание бленды. В настоящее время снята с производства.
Sigma 8mm f/3.5 EX DG Circular Fisheye
Ориентировочная цена: 600$
Плюсы: идеальный выбор для «быстрых» сфер на кропе 1,5…1,7, относительно хорошая зайцеустойчивость, хорошо исправляемые ХА, есть для разных байонетов. Минусы: смещение НТ.
Минусы: смещение НТ.
См. также: Sigma 8mm f/3.5 EX DG Circular Fisheye на вебсайте производителя.
Tamron SP AF11-18mm F4.5-5.6 Di II LD Aspherical [IF]
Ориентировочная цена: 650$
Плюсы: хороший выбор для сфер высокого разрешения на кропе 1,5…1,7. Минусы: только на кроп, не очень хорошее сведение геометрии при сшивке (слишком мало отзывов).
См. также: Tamron SP AF11-18mm F4.5-5.6 на вебсайте производителя.
Sigma 10-20mm F4-5.6 EX DC HSM
Ориентировочная цена: 500$
Плюсы: цена, отличная резкость прикрытых диафрагмах, конструктив, бленда в комплекте, есть для разных байонетов. Минусы: возможны проблемы с фокусировкой, только на кроп, разброс качества.
См. также: Sigma 10-20mm F4-5.6 EX DC HSM на вебсайте производителя, тест-стравнение Canon 10-22mm vs. Sigma 10-20mm.
Canon EF-S 10-22 F3.
 5-4.5 USM
5-4.5 USMОриентировочная цена: 720$
Плюсы: контраст, светосила, хорошая резкость даже на открытых диафрагмах. Минусы: блики, хроматические аберации, несколько завышенная цена, только на кроп.
См. также: Canon EF-S 10-22 F3.5-4.5 USM на вебсайте производителя, тест-стравнение Canon 10-22mm vs. Sigma 10-20mm.
Tokina AF12-24mm f/4 (AT-X 124 AF PRO DX)
Ориентировочная цена: 580$
Плюсы: хорошая резкость, светосила, есть для разных байонетов. Минусы: короткий конец начинается от 12 мм, только на кроп, медленная фокусировка.
См. также: Tokina AF12-24mm f/4 на вебсайте производителя.
ПЕЛЕНГ 3,5/8А «Рыбий глаз» (Peleng 8mm f/3.5 Fisheye)
Ориентировочная цена: 280$
Плюсы: бюджетный фишай объектив, позволяющий на кропе 1,5…1,7 снимать однорядные панорамы. Минусы: невысокие оптические характеристики, полоса выбеливания по краям кадра, блики, ХА, плохо держащаяся крышка объектива.
Минусы: невысокие оптические характеристики, полоса выбеливания по краям кадра, блики, ХА, плохо держащаяся крышка объектива.
См. также: ПЕЛЕНГ 3,5/8А на вебсайте производителя.
Tokina 107 AF DX Fisheye (10-17mm f/3.5-4.5)
Ориентировочная цена: 770$
Плюсы: Один из самых интересных вариантов: есть возможность делать как «быстрые сферы», как и панорамы в высоком разрешении. После спиливания бленды встает на фотоаппараты ФФ-матрицей. Есть варианты на Canon EOS и Nikon-D. Минусы: слишком мало отзывов об этой линзе в панорамной съемке — нет ясности с зайцеустойчивостью и геометрией по углам на ФФ.
См. также: Tokina 107 AF DX Fisheye на вебсайте производителя.
1.4. Фотокамеры
Выбор фотокамеры для съемки виртуальных сферических панорам, как ни странно, является менее значимым фактором для качества картинки на выходе. Минимальным требованиям удовлетворяют даже зеркальные камеры начального любительского ценового диапазона, например, Canon 350D или Nikon D50. Недостаточный размер матрицы (как в пикселях, так и миллиметрах) в панорамной съемке компенсируются большим числом кадров и возрастающим временем последующей обработки.
Недостаточный размер матрицы (как в пикселях, так и миллиметрах) в панорамной съемке компенсируются большим числом кадров и возрастающим временем последующей обработки.
Тем не менее, использование камер с ФФ-размером сенсора крайне желательно. Соотношение фокусного расстояния объектива и рабочего отрезка — фундаментальная величина, влияющая на оптическую схему линзы. Альтернативой может быть использование беззеркалок с соответствующе сконструированными объективами.
1.5. Прочие аксессуары для панорамной фотосъемки
В ряде случаев, изготовление виртуальных сферических панорам поможет значительно упростить наличие некоторых фотоаксессуаров. К таковым относятся:
Спусковой тросик для фотокамеры
Наличие спускового тросика является крайне желательным, если не обязательным, условием для создания виртуальных сферических панорам в интерьерах или просто в условиях низкой освещенности. Даже если панорамная фотосъемка ведется на улице, то наличие тросика позволит сэкономить время.
Даже если панорамная фотосъемка ведется на улице, то наличие тросика позволит сэкономить время.
Использование тросика (или ДУ на радиоволнах) также позволяет брать на съемки более легкий штатив.
Уровень в горячий башмак фотоаппарата
Двухпузырьковый спиртовой уровень в «горячий башмак» фотоаппарата не является вешью первой необходимости, однако он может пригодиться если фотосъемка производится с повернутой на 90° центральной колонной штатива а также при сборке и настройке панорамной головки. Такие двухпузырьковые спиртовые уровни есть у разных производителей, например у Manfrotto он зовется Manfrotto 337, у Arca — Double Axis Spirit Level у Kirk — Bubble Level (выглядят эти спиртовые уровни один в один). Ориентировочная цена — 30$.
На EBAY и прочих заокеанских магазинах есть множество аналогов от безызвестных производителей. Цена — на порядок ниже. Качество — как повезёт.
2. Фотосъемка кадров виртуальной сферической панорамы
Количество фотографий, требуемых для создания полной сферической панорамы, зависиот от фокусного расстояния объектива, кроп-фактора матрицы и желаемого процента перекрытия соседних кадров. Так, например, для объектива с выправленной дисторсией с фокусным расстоянием 10мм и кроп-фактором матрицы х1,6 я предпочитаю снимать в 2 ряда по 8 кадров в каждом, плюс отдельно зенит и надир, хотя требуется минимум 12 кадров (3+6+3). Минимально-достаточное количество фотографий для объективов с другим фокусным расстоянием можно оценить по следующей таблице:
| Фокусное расстояние объектива | Кроп-фактор матрицы * | Угол обзораобъектива **, HFOV|VFOV|DFOV | Кол-во фотографий, необходимых для полной сферы *** |
| 8мм фишай | х1,0 | 180+°|180°|180+° | 2 или 3+N |
х1,3 | 180+°|135°|180+° | 3+N | |
х1,5 | 191°|116°|180+° | 4+N | |
х1,6 | 181°|113°|180+° | 4+N | |
х1,7 | °|°|° | 4+N | |
| 10мм | х1,0 | 122(?)°|100°|130° | неприемлемо |
х1,3 | 108°|85°|118° | неприемлемо | |
х1,5 | 100°|77°|111° | Z+6+6+N или Z+8+8+N | |
х1,6 | 97°|74°|107° | Z+8+8+N | |
х1,7 | 93°|70°|104° | Z+8+8+N | |
| 10,5мм фишай | х1,0 | 180+(200?)°|139°|180+° | 3 |
х1,3 | 172°|100°|180+° | Z+4 | |
х1,5 | 139°|87°|173° | 6+N, Z+6, Z+6+N | |
х1,6 | 131°|84°|162° | 6+N, Z+6, Z+6+N | |
х1,7 | °|°|° | Z+6+N, Z+8+N | |
| 12мм | х1,0 | 113°|90°|122° | Z+6+6+N |
х1,3 | 98°|75°|108° | Z+8+8+N | |
х1,5 | 90°|67°|100° | Z+8+8+N | |
х1,6 | 86°|64°|97° | Z+8+8+N | |
х1,7 | 83°|61°|93° | Z+8+8+N | |
| 14мм | х1,0 | 104°|81°|114° | Z+6+6+N |
х1,3 | 89°|67°|100° | Z+8+8+N | |
х1,5 | 80°|58°|91° | Z+8+8+8+N | |
х1,6 | 78°|56°|88° | Z+8+8+8+N | |
х1,7 | °|°|° | Z+8+8+8+N | |
| 15мм фишай | х1,0 | 141°|91°|180° | Z+5+N |
х1,3 | 109°|70°|138° | Z+6+N | |
х1,5 | 94°|61°|114° | Z+8+8+N | |
х1,6 | 88°|58°|107° | Z+8+8+N | |
х1,7 | 83°|54°|100° | Z+8+8+N | |
| 16мм фишай | х1,0 | 137°|88°|170° | 5+5 или Z+6+N |
х1,3 | 107°|65°|127° | Z+8+N | |
х1,5 | 88°|58°|107° | Z+8+8+N | |
х1,6 | 83°|55°|101° | Z+8+8+N или Z+9+9+N | |
х1,7 | °|°|° | Z+10+10+N | |
| 16мм | х1,0 | 97°|74°|107° | Z+6+6+N |
х1,3 | 82°|60°|92° | Z+8+8+8+N | |
х1,5 | 73°|52°|83° | Z+10+10+10+N | |
х1,6 | 71°|51°|81° | Z+10+10+10+N | |
х1,7 | °|°|° | Z+10+10+10+N | |
| 17мм | х1,0 | 97°|74°|107° | Z+8+8+N |
х1,3 | 82°|60°|92° | Z+8+8+8+N | |
х1,5 | 70°|50°|81° | Z+10+10+10+N | |
х1,6 | 67°|48°|77° | Z+10+10+10+N | |
х1,7 | °|°|° | Z+10+10+10+N | |
| 18мм | х1,0 | 90°|67°|100° | Z+8+8+N |
х1,3 | 77°|53°|86° | Z+9+9+9+N | |
х1,5 | 67°|48°|77° | Z+10+10+10+N | |
х1,6 | 64°|45°|74° | Z+10+10+10+N | |
х1,7 | °|°|° | Z+12+12+12+N | |
| 20мм | х1,0 | 84°|62°|94° | Z+8+8+8+N |
х1,3 | 71°|47°|80° | Z+10+10+10+N | |
х1,5 | 62°|44°|72° | Z+12+12+12+N | |
х1,6 | 59°|41°|68° | Z+12+12+12+N | |
х1,7 | 56°|39°|65° | Z+12+12+12+N | |
| 22мм | х1,0 | 79°|57°|89° | Z+8+8+8+N |
х1,3 | 66°|44°|75° | Z+10+10+10+N | |
х1,5 | 56°|39°|66° | Z+12+12+12+12+N | |
х1,6 | 54°|38°|63° | Z+12+12+12+12+N | |
х1,7 | °|°|° | Z+15+15+15+15+N | |
| 24мм | х1,0 | 74°|53°|84° | Z+10+10+10+N |
х1,3 | 60°|42°|69° | Z+12+12+12+N | |
х1,5 | 53°|37°|62° | Z+15+15+15+15+N | |
х1,6 | 50°|35°|59° | Z+15+15+15+15+N | |
х1,7 | 48°|33°|56° | Z+15+15+15+15+N | |
| 28мм | х1,0 | 65°|46°|75° | Z+10+10+10+N |
х1,3 | 54°|35°|62° | Z+12+12+12+N | |
х1,5 | 46°|31°|54° | Z+15+15+15+15+N | |
х1,6 | 44°|30°|52° | Z+15+15+15+15+N | |
х1,7 | °|°|° | Z+15+15+15+15+N |
Комментарии к таблице:
* Кроп-фактор:
х1 — Полноформатные (Full Frame, 35-мм камеры) Canon, Nikon, Sony, Kodak
х1,3 — «Репортажные» профессиональные камеры Canon
х1,5 — Advanced Photo System type-C (APS-C) камеры Nikon, Sony, Pentax
1,6 — Advanced Photo System type-C (APS-C) камеры Canon
1,7 — Sigma
** Угол обзора
В таблице содержатся ориентировочные значения. В отдельных случаях возможен незначительный разброс. Например, Canon EF 17-40mm f/4L при фокусном расстоянии 17 мм на кропе 1,6 имеет несколько большие углы обзора, чем Canon EF-S 17-85mm f/4-5.6 IS при тех же 17 мм, а на ФФ больше, чем Nikon 17-35mm f/2.8D ED-IF.
В отдельных случаях возможен незначительный разброс. Например, Canon EF 17-40mm f/4L при фокусном расстоянии 17 мм на кропе 1,6 имеет несколько большие углы обзора, чем Canon EF-S 17-85mm f/4-5.6 IS при тех же 17 мм, а на ФФ больше, чем Nikon 17-35mm f/2.8D ED-IF.
*** Минимальное количество изображений, необходимое для сборки полной сферы
Z и N — зенит и надир, соответственно.
Количество цифр — количество рядов при панорамной фотосъемке.
Значение цифр — количество изображений в соответствующем ряде при панорамной фотосъемке.
Например, панорамную фотосъемку по алгоритму Z+10+10+10+N следует понимать так:
1) Съемка изображения с направлением на зенит (+90° от линии горизонта).
2) Съемка верхнего ряда с наклоном +60° от линии горизонта, в ряду 10 кадров с ротацией каждого последующего в 36°.
3) Съемка среднего ряда без наклона по линии горизонта, в ряду 10 кадров с ротацией каждого последующего в 36°.
4) Съемка нижнего ряда с наклоном -60° от линии горизонта, в ряду 10 кадров с ротацией каждого последующего в 36°.
5) Съемка изображения с направлением на надир (-90° от линии горизонта).
Фотосъемка кадров будущей виртуальной панорамы ведется либо при фиксированной экспозиции, либо с ручным управлением — автоматика часто дает ошибки, особенно матричный замер. Если во время фотосъемки панорамы требуется сильно изменять экспозицию, то процент перекрытия между соседними кадрами требуется больший, соответственно, возрастает и число кадров, необходимых для замыкания сферы виртуальной панорамы.
Фокусировка объектива при фотосъемке ручная, выставленная на гиперфокальное расстояние либо по сюжету.
ISO, если не производится съемка со штатива и нет быстро движущихся объектов, минимальное.
При фотосъемке рекомендуется делать фотографии в формате RAW. Использование формата RAW производится для минимизации дальнейших проблем. На этапе RAW-конвертера выполняется компенсация грубых перепадов по яркости отдельных фотографий будущей панорамы, а также исправление хроматических аберраций объектива и виньетирования — при его отсутствии возможна качественная склейка сферической панорамы с большим разбросом экспозиции.
На этапе RAW-конвертера выполняется компенсация грубых перепадов по яркости отдельных фотографий будущей панорамы, а также исправление хроматических аберраций объектива и виньетирования — при его отсутствии возможна качественная склейка сферической панорамы с большим разбросом экспозиции.
3. Склейка равноугольной проекции панорамы в PTGui
Равноугольная проекция (эквиректангулярной проекция, проекция сферы на плоскость) — это базовая проекция при изготовлении сферических панорам. Равноугольная проекция имеет соотношения сторон 1:2 и похожа на развертку карты мира на 1 лист. В равноугольной проекции зенит и надир (полюса) из точек растягиваются в линии, а горизонтальные линии (параллели) приобретают аркообразную форму.
Для создания равноугольной проекции я использую PTGui, эта програма имеет интуитивно понятный интерфейс, богатые возможности и дает превосходные результаты. Огромным плюсом является возможность подключения к PTGui плагина Smartblend для выравнивания отдельных кадров панорамы по свету. Альтернативами PTGui (с некоторыми оговорками) могут быть Realviz Stitcher или AutoPano Pro, обе эти программы также позволяют подключать в виде плагина Smartblend.
Альтернативами PTGui (с некоторыми оговорками) могут быть Realviz Stitcher или AutoPano Pro, обе эти программы также позволяют подключать в виде плагина Smartblend.
Процесс склейки с использованием базовых возможностей программы PTGui выгядит следующим образом:
Первым делом загружаем исходные изображения (1). Если съемка проходила в несколько рядов, то следует соблюдать последовательность справа налево, т.е. сначала 1-й кадр первого ряда, потом тот кадр первого ряда, который находится правее и так до конца ряда. Потом тот кадр второго ряда, который был под 1-м кадром 1-го ряда и т.д. Кадры с ориентацией камеры в зенит и в нарид я вставляю в самом конце.
После загрузки кадров в PTGui они иногда сами занимают правильную ориентацию (включен датчик поворота камеры), иногда их следует развернуть вручную.
После чего запускаем процесс сопоставления изображений (2). В процессе этого PTgui генерирует контрольные точки, по которым сопоставляются пересекающиеся фотографии.
В результате чего PTgui покажет превью равноугольной проекции. При использовании панорамной головки с правильно выставленной нодальной точкой существенного редактирования изображения не требуется. Тем не менее, работу искусственного интелекта PTgui можно довести до профессионального вида. Для этого переводим программу PTgui в расширенный режим (3) и переходим на закладку Оптимизация (4).
Оптимизация нужна для подбора наилучшего преобразования параметров дисторсии линзы. В процессе оптимизации PTGui подгоняет контрольные точки друг к другу.
Наилучшие результаты приносит последовательная оптимизация: вначале степень минимизации дисторсии линзы выбирается «Medium» (5) и алгоритм оптимизации «PTgui» (6), в конце — «Heavy + lens shift» (5) и «Panorama Tools» (6).
После каждого шага, в окне результатов оптимизации, мы видим среднюю, минимальную и максимальную дистанцию между контрольными точками а также интегральное мнение PTgui о проведенной процедуре. Возможны следующие варианты: «very bed», «bed», «not so bed», «not so good», «good», «very good» и «too good to be true». С каждым шагом оптимизации в PTgui результаты должны улучшаться.
Возможны следующие варианты: «very bed», «bed», «not so bed», «not so good», «good», «very good» и «too good to be true». С каждым шагом оптимизации в PTgui результаты должны улучшаться.
Закрываем окно результатов (8) и переходим на первую закладку PTGui «Project Assistant» (9).
Открываем «Control points Assistant» (10) и в закладке «Control points Table» удаляем ~10% наихудших контрольных точек по параметру «Distance» (11). Это делается, во-первых, для исключения багов автоматической расстановки контрольных точек PTGui (например, на вращающуюся часть панорамной головки или другие движущиеся объекты). А, во-вторых, для того, чтобы исключить влияние так называемых статистических выбросов, т.е. сверхбольших отклонений, вносящих в суммарную статистику работы PTGui непропорционально большое влияние.
Запускаем еще раз оптимизацию с наиболее жесткими параметрами и в результате PTGui выдает результат «too good to be true».
Ппосле этого переходим к закладке «Create Panorama» (12).
Задаем в PTGui размер получаемого изображения (13). Для полноэкранных сферических панорам обычно достаточно файлов размером 6000х3000 или даже 5000х2500 точек. Если стоит задачей зумирование виртуальной панорамы в широком диапазоне или просмотр отдельных деталей, то изготавливаются равноугольные проекции 8000х4000 точек и более.
Выбираем формат получаемого файла (14) и (15). При склейке рекомендуется сохранять равноугольную проекцию панорамы в формате Фотошопа, это позволяет получать в одном файле не только целое склеенное изображение панорамы, но и отдельные составляющие кадры в слоях.
Далее выбираем имя и папку сохраняемого файла (16).
В качестве программы блендера выбираем Smartblend (17).
И, наконец, жмем кнопку «Create Panorama» (18). И ждем. Процесс склейки занимает в PTGui от нескольких минут до часа и более.
В результате PTGui выдает примерно такую картинку:
Обратите внимание! На данном этапе остается черная или прозрачная полоса (в зависимости от используемых опций при склейке) внизу изображения, в том месте, которое не вошло в сферу панорамы, т.к. кадр надира не был загружен в PTGui.
4. Обработка равноугольной проекции в Фотошопе
Одна из основных задач обработки равноугольной проекции панорамы — это прорисовка движущихся объектов в слоях в соответствии с творческим замыслом. Можно оживить картинку, расставив побольше людей, а можно всех их скрыть. Если один и тот же человек (или другой движущийся объект) попадает последовательно на два кадра, то, вполне естественно, на одном из них его лучше скрыть.
Было так (кроп панорамы в равноугольной проекции):
Стало так (тот же кроп панорамы в равноугольной проекции):
К равноугольной прокции сферической панорамы также применимы стандартные методы обработки фотографий подаление шумов, цветокоррекция, повышение краевого контраста (при необходимости).
Если тень от штатива получилась длинная (например, фотосъемка панорамы проводилась в утренне-вечерние часы) её также можно заретушировать на этапе обработки равноугольной проекции. «Зайцев» объектива также целесообразно ретушировать на данном этапе.
5. Конвертирование панорамы в кубическую проекцию с помошью Pano2QTVR
Для того, чтобы получить максимально реалистичную сферическую панораму, нужно убрать из получившегося изображения штатив, тень от штатива и тень от фотографа. Штатив находится в надире, в самом низу на равноугольной проекции. В равноугольной проекции редактировать надир неудобно, для этого равноугольная проекция трансформируется в кубическую (проекцию «сфера на куб»). Такая проекция состоит из 6 отдельных квадратных кадров, являющихся гранями куба.
Для преобразования равноугольной проекции в кубическую я использую программу Pano2QTVR. Процесс выглядит следующим образом:
В программе Pano2QTVR создается новый «проект» (1), выбирается папка, где хранится равноугольная проекция (2):
На закладке «Project» убеждаемся, что в качестве исходника выбрана равноугольная проекция (3), указываем файл (4) и нажимаем кнопку «Переобразовать в куб» (5):
Выбираем интерполятор (6) и запускаем преобразование (7):
При конвертировании равноугольной проекции в кубическую общий размер панорамного изображения увеличивается.![]() Так, при размере равноугольной проекции 6000х3000, размер каждого из 6 кадров в кубической проекции получается 1908х1908 точек. А при размере равноугольной проекции 8000х4000 — в кубической 2544х2544 точек.
Так, при размере равноугольной проекции 6000х3000, размер каждого из 6 кадров в кубической проекции получается 1908х1908 точек. А при размере равноугольной проекции 8000х4000 — в кубической 2544х2544 точек.
6. Ретуширование надира и зенита
Открыв файл надира в Фотошопе появляется возможность заретушировать то место, где был штатив. Есть несколько методик, основная суть которых сводится к двум: либо просто замазать инструментом Clone Stamp Tool,
…либо вставить заранее отснятый фрагмент надира с убранным штативом (снятый с рук, с «журавлика», с помощью специальной панорамной головки и т.д.).
Иногда требуется подретушировать не только надир, но и зенит. В зените иногда появляется «звезда», количество лучей которой соответствует количеству изображений в верхнем ряду панорамы. Это происходит из-за неидеальных исходных снимков и несовершенства работы программ блендинга.
7. Создание конечных файлов панорамы
Есть несколько различных программ просмотра сферических панорамных изображений, многие из них используют свои собственные форматы файлов.
7.1. QTVR: сферические виртуальные панорамы для DevalVR и QuickTime
Стандарт QTVR (QuickTime Virtual Reality) используется просмотрщиками DevalVR и QuickTime, на сегодняшний день это, де-факто, основной формат для демонстрации высококачественных полноэкранных сферических панорам. Для конвертирования в QTVR-файлы я также пользуюсь программой Pano2QTVR.
В Pano2QTVR в «Типе проекта» выбирается «Кубическая панорама» (8), загружаются полученные файлы кубической проекции панорамы (9), задается имя получаемого файла с расширением mov.
На закладке «Конфигурация» можно задать размер получаемой сферической панорамы (11), задать сегментацию стороны куба для загрузки панорамы (12), степень JPEG-компрессии (13). Также можно задать начальный, максимальный и минимальный углы обзора виртуальной сферической панорамы и её начальное направление просмотра (14):
Также можно задать начальный, максимальный и минимальный углы обзора виртуальной сферической панорамы и её начальное направление просмотра (14):
В Pano2QTVR достаточно прокрутить панораму мышью и сохранить полученные параметры (15):
На закладке «Автор» в Pano2QTVR можно ввести свои координаты (16), после чего запустить обсчет создания QTVR-панорамы:
Пример сферической виртуальной панорамы в формате QTVR (1,8 Мб, прямая ссылка на mov-файл, файл можно скачать и просматривать панораму офф-лайн с помощью DevalVR или QuickTime).
7.2. Flash-панорамы: Виртуальные сферические 3D-панорамы на основе технологии Flash
Flash достаточно универсальный стандарт, может также использоваться для показа панорам. Создание Flash-панорам тоже возможно с помошью Pano2QTVR. Для этого Pano2QTVR должна быть версии не ниже 1.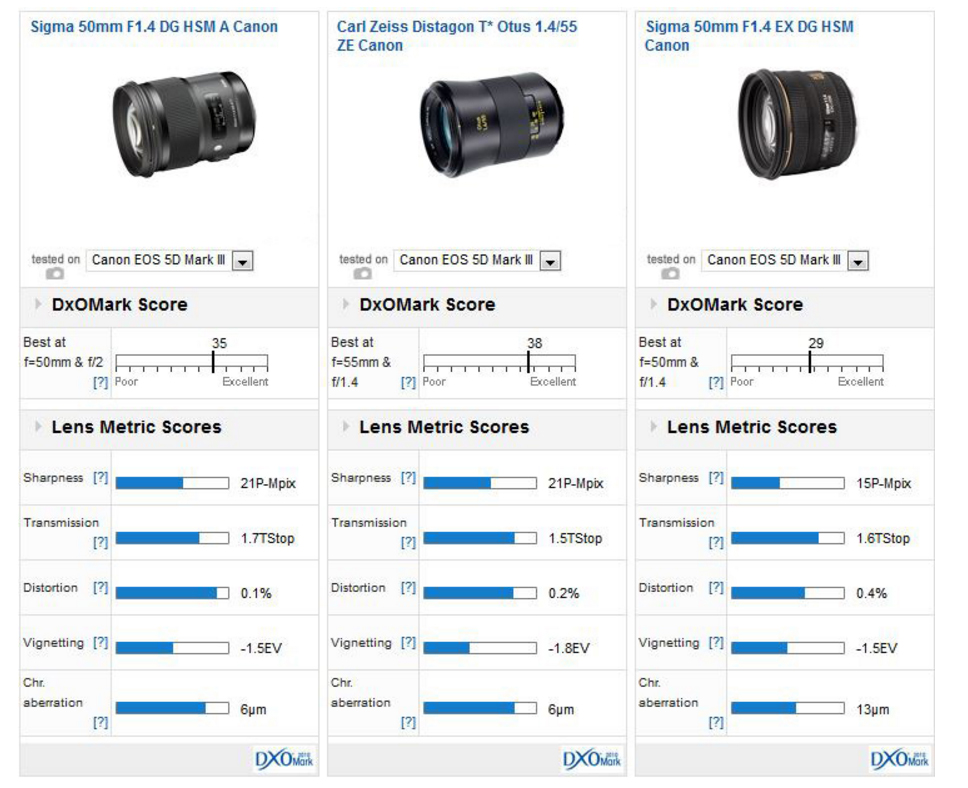 5.0 (желательно Pano2QTVR v.1.6.1 и выше) и нужно обладать Flash-лицензией Pano2QTVR.
5.0 (желательно Pano2QTVR v.1.6.1 и выше) и нужно обладать Flash-лицензией Pano2QTVR.
Сборка Flash-панорам в программе Pano2QTVR аналогична QTVR-панорамам. Помимо этого, в программе Pano2QTVR есть специальные опции для создания Flash-панорам, которые находятся на закладке Flash (18). Можно выбрать контроллер вращения панорамы, задать автовращение, опции качества отображения Flash-панорамы… Далее задаем формат получаемой панорамы как Flash (19) и запускаем конвертор (20).
Пример сферической виртуальной панорамы в формате Flash (1,7 Мб, прямая ссылка на файл, если ваш интернет-браузер поддерживает воспроизведение Flash, то откроется панорама на полный экран).
7.3. PTviewer: Виртуальные сферические панорамы для Java-машины
Возможно также проекцию «сфера на куб» сконвертировать обратно в равноугольную, в один jpg-файл. Такие файлы можно просматривать через некоторые Java-просмотрщики, например, PTviewer. Существенным недостатком PTviewer является то, что он не поддерживает виртуальные сферические панорамы в высоком разрешении, что накладывает существенные ограничения на просмотр полноэкранных панорам.
Существенным недостатком PTviewer является то, что он не поддерживает виртуальные сферические панорамы в высоком разрешении, что накладывает существенные ограничения на просмотр полноэкранных панорам.
Обратное преобразование в равноугольную проекцию в Pano2QTVR выглядит следующим образом:
Переходим на закладку «Project» (21) , убеждаемся, что загружены файлы кубической проекции панорамы и нажимаем кнопку «Переобразовать» (22) . В откроющемся окне Pano2QTVR задаем имя файла, размер изображения и интерполятор, запускаем преобразование (23) :
Получается картинка, аналогичная результатам работы PTGui. Однако, загрузив в Pano2QTVR кубическую проекцию панорамы с подретушированным штативом, имеем на выходе полную сферическую панораму в равноугольной проекции:
Равноугольную проекцию виртуальной панорамы для PTviewer можно скачать по этой ссылке этой ссылке (jpeg-файл, размер 3000х1500 точек, 810 Кб).
7.4. Создание виртуальных сферических панорам для SPi-V-вьювера Shockwave
Еще кубическую или равноугольную проекцию панорамы можно сконвертировать в jpg-картинку для SPi-V-вьювера Shockwave. Файлы формата SPi-V выглядят как сторны куба, поставленные один на один:
Виртуальную сферическую панораму для SPi-V-вьювера Shockwave можно скачать по этой ссылке (JPEG-картинка 1501х9006 точек, 2,15 Мб)
Генерирование картинки для SPi-V-вьювера Shockwave также одна из многочисленных возможностей Pano2QTVR. Деалется это следующим образом:
Аналогично созданию QTVR- или Flash-файлам панорамы выбирается исходные файлы в кубической проекции. Далее в программе Pano2QTVR открывается закладка «Дополнения» (24), где есть блок опций для создания SPi-V-файлов под Shockwave. Задается сжатие (25), вписывается имя JPEG-файла панорамы в формате SPi-V (26) и жмется кнопка «Создать ленту» (27).
7.5. ImmerVision PurePlayer: Создание полноэкранных сферических панорам для Java-машины с помощью REALVIZ Stitcher
Альтернативным вьювером сферических виртуальных панорам для Java является PurePlayer от ImmerVision (PURE = Panorama Universal Rendering Engine). На мой взгляд, это лучший вьювер для Java-машины. PurePlayer — это единственный плеер для Java, который без оговорок позволяет просматривать панорамы в полный экран.
ImmerVision PurePlayer «кушает» файлы своего собственного формата — IVP. Pano2QTVR не умеет создавать IVP-файлы, возможно, это одно из самых значимых ограничений программы Pano2QTVR. Для их создание используется Panorama 3DS Exporter собственного производства ImmerVision или REALVIZ Stitcher версии 5.5 и старше.
Различные программы используют разные алгоритмы присвоения имен файлам плоскостей куба. Их соответствие приведено в таблице:
| Программы | Стороны куба | |||||
| Передняя | Правая | Задняя | Левая | Верхняя | Нижняя | |
| Pano2QTVR стандартная нумерация | 0 | 1 | 2 | 3 | 4 | 5 |
| REALVIZ Stitcher буквенная нумерация | f | r | b | l | u | d |
| Pano2QTVR нумерация dosup | 11 | 22 | 33 | 44 | 55 | 66 |
| REALVIZ Stitcher числовая нумерация | 1 | 2 | 3 | 4 | 5 | 6 |
Если вы конвертировали равноугольную проекцию в кубическую, например, с помощью Pano2QTVR, а изготавливать IVP-файлы для ImmerVision PurePlayer собираетесь с помощью REALVIZ Stitcher, то потребуется вручную переименовать файлы.
Создание IVP-файла с помощью REALVIZ Stitcher для ImmerVision PurePlayer выглядит следующим образом:
Загружаются файлы панорамы в кубической или равноугольной проекции (1):
Щелкаем по значку «Render» (2):
В открывшемся окне вписываем имя получаемого IVP-файла, в поле «type» выбираем «Spherical Image» и «PurePlayer» (3), задаем размер изображения панорамы, после чего в окне REALVIZ Stitcher переходим на закладку «Rendering Options» (4):
Выбираем интерполятор Lanczos3 (5) и запускаем конвертор (6):
Тут можно скачать файл в формате IVP для ImmerVision PurePlayer, созданный REALVIZ Stitcher.
8. Демонстрация виртуальных панорам в Интернете, Pano2QTVR HTML-коды для DevalVR, QuickTime, Flash, Shockwave и Java-просмотрщиков
Для демонстрации виртуальной панорамы в Интернете её нужно встроить в файл интернет-страницы. Тут нужно либо обладать базовыми навыками в знании HTML, либо можно пользоваться стандартными шаблонными страницами, генерируемыми некоторыми программами. Всё та же Pano2QTVR обладает и этой возможностью.
Тут нужно либо обладать базовыми навыками в знании HTML, либо можно пользоваться стандартными шаблонными страницами, генерируемыми некоторыми программами. Всё та же Pano2QTVR обладает и этой возможностью.
На закладке «Дополнения» в программе Pano2QTVR есть блок опций, который зовется «Файл HTML». Там можно выбрать шаблон файла (28), ввести имя HTML-файла (29), после чего, нажав кнопку «Создать HTML», получить требуемый файл (30). Pano2QTVR автоматически подставляет имя файлов DevalVR-, QuickTime-, Flash-, Shockwave- или Java-панормы, которые были сгенерированы ранее.
Недостатком работы Pano2QTVR и других программ, генерирующих коды HTML-файлов, является отсутствие возможности гибкой настройки, что не позволяет задействовать дополнительные параметры, например, включить автовращение виртуальной панорамы. С полным списком возможностей настройки различных просмотрщиков виртуальных панорам можно ознакомится на веб-страницах их разработчиков, например, для DevalVR на этой странице.
С использованием скриптов возможно определить какие програмы просмотра виртуальных панорам поддерживаются браузером пользователя, и, в соответствии с этим, показать наилучший файл из возможных. В моей «Галерее» для демонстрации сферических виртуальных панорам используется DETECTVR-скрипт, автором которого является Armando Saenz, больше известный как fiero (автор DevalVR). Также как и DevalVR, этот скрипт распространяется под лицензией freeware. DETECTVR-скрипт дает возможность выбирать между DevalVR, QuickTime, Flash, Java-машины (PTViewer или PurePlayer, но не оба одновременно) или Shockwave, расставлять приорететы выбора, указывать максимальные размеры окна просмотра и т.д. Подробнее о этом скрипте можно почитать на этой странице.
Определение нодальной точки для съёмки с автоматической панорамной головкой CLAUSS piXplorer
Для создания панорамных снимков без параллакса необходимо правильно определить нодальную точку.
Нодальная точка является центром проекции линз (входного зрачка объектива), через который, в идеале, проходят все световые лучи от объекта. Сшивка отдельных граничных изображений может быть выполнена успешно и при отсутствии ошибок наложения только при условии, что нодальная точка будет всегда одинаковой для каждого отдельно взятого изображения.
Для поиска нодальной точки установленной на головке фотокамере, инженерами фирмы CLAUSS были разработаны и запатентованы специальные конструкционные решения 3D-регулировки piXplorer,, Удалось сделать так, что, несмотря на очень малые габаритные размеры, piXplorer, регулировка осуществляется в широком диапазоне и подходит для работы с камерами различных размеров. Внимательно изучите наши рекомендации, пожалуйста.
В начале работы установите, пожалуйста, быстросъемную переходную пластину (которая входит в комплект поставки) на саму камеру так, чтобы края были расположены параллельно оптической оси. Согласно изображению на рисунке, предусмотрено два способа достижения этой цели. В целом, следует выбирать положение, при котором между камерой и быстросъемной пластиной обеспечивалось бы наибольшая по площади контактная поверхность.
Согласно изображению на рисунке, предусмотрено два способа достижения этой цели. В целом, следует выбирать положение, при котором между камерой и быстросъемной пластиной обеспечивалось бы наибольшая по площади контактная поверхность.
При выборе положения сразу же за осью наклона, лучше всего придерживаться варианта изображенного в верхней части Рис.1, тогда как вариант на нижней части Рис.1 наиболее целесообразно придерживаться при выборе положения в случае, если расстояние до оси наклона является максимальным. То, какому именно окну масштабирования следует уделять внимание, будет во многом зависеть от выбранного Вами направления – пожалуйста, действуйте в направлении, указанном маленькой стрелкой.
Почти все комбинации, относящиеся к линзам камеры, работают по принципу определения точки поворота (нодальной точки), наиболее близко расположенной к соответствующей линзе, а не к фактической точке крепления камеры. В штатном режиме работы результатом будет являться то направление наблюдения камеры, которое показано на странице 8. Если, в исключительных случаях, при регулировке глубины необходимо, чтобы значение было отрицательным, то камеру следует устанавливать в противоположном для наблюдения направлении. Теперь алгебраический знак для вертикальных углов и порядок отснятых кадров также сменится на противоположный.
Если, в исключительных случаях, при регулировке глубины необходимо, чтобы значение было отрицательным, то камеру следует устанавливать в противоположном для наблюдения направлении. Теперь алгебраический знак для вертикальных углов и порядок отснятых кадров также сменится на противоположный.
Рис.1 Варианты установки быстросъемной переходной пластины на камеру.
Для исключительно малоразмерных камер (с высотой оси менее 36 мм) предусмотрена специальная переходная пластина, которую также можно использовать для коррекции потенциально возможного ступенчатого стыка между штативом-треногой и осью линзы.
Согласно следующему изображению на Рис.2, быстросъемную пластину, установленную на камере, необходимо вставить в соединительную панель под нужным углом. После этого перемещайте ее параллельно оптической оси до вставки блокировочного рычажка в паз со щелчком. Для его ослабления надавите на блокировочный рычажок так, чтобы после этого пластину можно было выдвинуть из направляющей, переместив ее в противоположном направлении.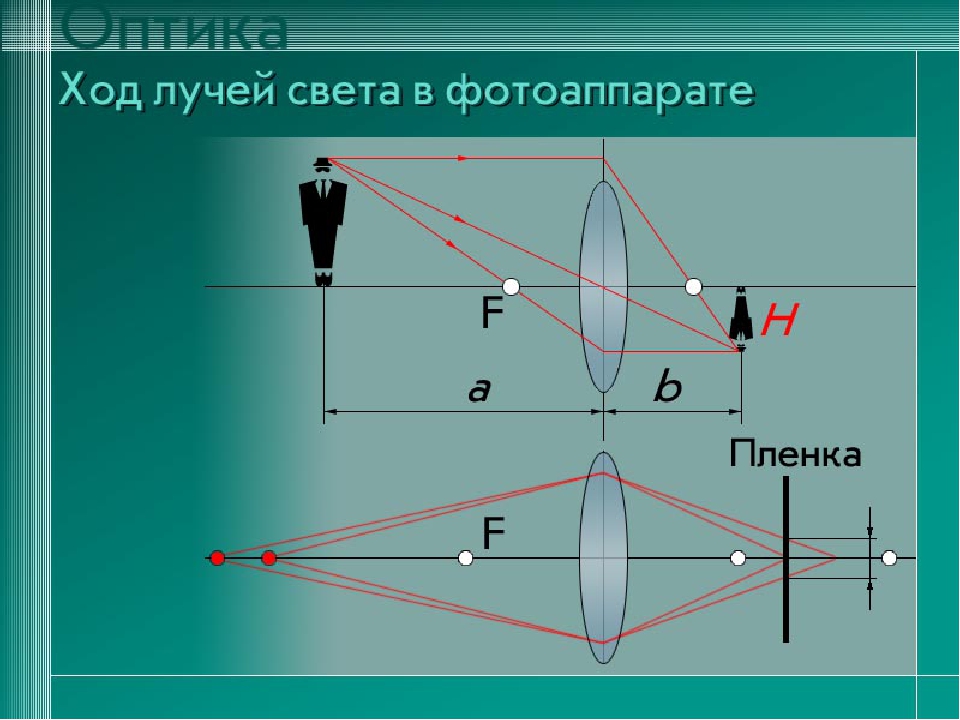
Рис.2 Порядок установки быстросъемной переходной пластины на панорамную головку piXplorer
Устройство piXplorer позволяет настроить фокусное расстояние величиной до 500 мм. Чем короче фокусное расстояние, тем больше угол обзора для каждого снимка, и тем меньше число изображений в каждой панораме, тем короче время съемки, но и детальное разрешение изображения при этом – тоже меньше. В случае увеличения фокусного расстояния, детальное разрешение также увеличивается. Кроме того, можно не только обозревать всю панораму целиком, но и просматривать ее отдельный увеличенный фрагмент. При удвоении фокусного расстояния, количество пикселей увеличивается в четыре раза в каждой панораме, но при этом потребуется в четыре раза больше отдельных изображений. Когда производится комбинирование и обработка нескольких сотен изображений, то панорама получается в районе одного гигапикселя. Настоятельно рекомендуем не переходить сразу к гигапиксельным проектам, поскольку лучше начать делать свои первые шаги с использованием нормального фокусного расстояния – т. е. фокусного расстояния до объекта, которое приблизительно соответствует длине диагонального экрана. Давайте сделаем традиционный малоразмерный снимок формата 36 мм х 24 мм (экран по диагонали 43 мм). Итак, фокусное расстояние здесь приблизительно составляет 50 мм. Если размер кристалла Вашей камеры (также обозначаемый как «размер матрицы» в технических данных – не путайте это понятие с понятием «количество пикселей») отличается от того, который подходит для снимков малоразмерного формата, то необходимо рассчитать соотношение длины двух изображения в виде кроп-фактора.
е. фокусного расстояния до объекта, которое приблизительно соответствует длине диагонального экрана. Давайте сделаем традиционный малоразмерный снимок формата 36 мм х 24 мм (экран по диагонали 43 мм). Итак, фокусное расстояние здесь приблизительно составляет 50 мм. Если размер кристалла Вашей камеры (также обозначаемый как «размер матрицы» в технических данных – не путайте это понятие с понятием «количество пикселей») отличается от того, который подходит для снимков малоразмерного формата, то необходимо рассчитать соотношение длины двух изображения в виде кроп-фактора.
Пример: На камере D5000 (APS-C) Nicon указан размер матрицы, равный 23,6 х
15,8 мм. Кроп-фактор, в данном случае, будет равен 36: 23,6 = 1,52.
Нормальным фокусным расстоянием можно считать 50 мм: 1,52 = 33 мм, что означает необходимость выбора поля в диапазоне 30..35 мм.
Иногда кроп-фактор напрямую указывается для соответствующей модели той или иной камеры. В противном случае, необходимо применить оптическое фокусное расстояние для линз, предназначенных для снимков малоразмерного формата, и включить его в настройки piXplorer со значением, умноженным на величину кроп-фактора.
В противном случае, необходимо применить оптическое фокусное расстояние для линз, предназначенных для снимков малоразмерного формата, и включить его в настройки piXplorer со значением, умноженным на величину кроп-фактора.
Для вышеупомянутого примера оптическое фокусное расстояние будет равным, допустим, 70 мм, что указано на линзах, соответственно, 70 мм * 1,52 = 106 мм, что и нужно задать в меню.
Углы отдельного кадра в двух съемочных положениях обозначены на обоих рисунках, представленных ниже, в виде дуги окружности. Два объекта (круглый, квадратный), выравнивание которых осуществляется относительно точки поворота, находятся на разном расстоянии друг от друга. При неправильно выполненной регулировке, можно будет наблюдать перемещение нодальной точки N вокруг поворотной точки S. Она будет менять свое положение от кадра к кадру. Вследствие этого, перспектива обоих объектов относительно друг друга также будет изменяться: На верхнем рисунке квадрат находится слева от круга, тогда как на нижнем рисунке – наоборот. Только если нодальная точка будет оставаться в пределах точки поворота (как показано на рисунке справа), то и перспектива будет оставаться неизменной.
Только если нодальная точка будет оставаться в пределах точки поворота (как показано на рисунке справа), то и перспектива будет оставаться неизменной.
Рис.3
На панорамной головке существует только одна постоянная центральная точка поворота – точка пересечения S оси панорамирования P и оси наклона T (см. рисунок выше).
Не имеет значения, в каком направлении вращаются оси: указанное пересечение всегда является стационарной точкой в данном поле.
Теперь необходимо обеспечить выполнение двух условий:
1) Оптическая ось O камеры должна пройти через пересечение S («регулировка по высоте»). Такого рода регулировка применима в отношении корпуса камеры, и не зависит от используемых линз.
2) Необходимо скорректировать нодальную точку N вдоль оптической оси, непосредственно в месте пересечения S («регулировка по глубине»). Такого рода регулировка напрямую зависит от используемых линз, а в случае, если применяется вариообъектив, существует еще и зависимость от задействованного фокусного расстояния (см. рисунок ниже).
Такого рода регулировка напрямую зависит от используемых линз, а в случае, если применяется вариообъектив, существует еще и зависимость от задействованного фокусного расстояния (см. рисунок ниже).
Полезный совет: Для большинства комбинаций, относящихся к линзам камеры, существуют таблицы, где указаны парные значения, которые подлежат регулировке.
Штанга камеры содержит все компоненты, необходимые для регулировки нодальной точки (см. рисунок 4). Если слегка ослабить винты с насеченной головкой 1 либо 2, которые зафиксированы болтами друг напротив друга, то это позволит поворачивать установочный диск 3 для регулировки высоты, и далее можно будет вытягивать или втягивать камерную платформу наподобие телескопа. Одновременно с этим, на диске шкалы 4 можно будет считывать показания высоты H, которая только что была отрегулирована. В случае перемещения одного из таких винтов на больший по размеру участок резьбового шпинделя, появляется и пространство для перемещения штанги камеры с целью выполнения регулировки по глубине. Конкретное значение можно наблюдать на шкале глубины 5. Необходимо руководствоваться окном масштабирования, которое соответствует выбранному положению винта камеры. Если снова затянуть указанные винты с насеченной головкой относительно друг друга, то можно будет выбирать величину глубины, причем настройка высоты одновременно с этим фиксируется по месту.
Конкретное значение можно наблюдать на шкале глубины 5. Необходимо руководствоваться окном масштабирования, которое соответствует выбранному положению винта камеры. Если снова затянуть указанные винты с насеченной головкой относительно друг друга, то можно будет выбирать величину глубины, причем настройка высоты одновременно с этим фиксируется по месту.
Экспериментальная оценка нодальных точек производится в два этапа следующим образом:
Рис.4
Чтобы выбрать идеальную позицию для оптической оси O, необходимо, прежде всего, установить гнездо головки штатива камеры по центру, непосредственно под линзами, что является нормальной практикой для повсеместно используемых камер. Это не всегда применимо лишь в случае использования небольших компактных камер, однако для последних, как правило, в таких случаях предусмотрено наличие переходной пластины, приобретаемой дополнительно.
Во-вторых, необходимо правильно определить высоту камерной линзы H и установить ее – с учетом скорректированного значения A – на piXplorer. Для получения надлежащего значения высоты допускается установить камеру на стол. Необходимо снять объектив для проведения такого измерения, после чего накрыть зеркало крышкой. Часто на центральной части крышки отсутствует какой-либо указатель, поэтому измерение высоты A и B следует выполнить, как указано ниже.
Для получения надлежащего значения высоты допускается установить камеру на стол. Необходимо снять объектив для проведения такого измерения, после чего накрыть зеркало крышкой. Часто на центральной части крышки отсутствует какой-либо указатель, поэтому измерение высоты A и B следует выполнить, как указано ниже.
Полезный совет: Проводить такого рода измерительные работы лучше всего тогда, когда камера расположена на самом крае стола, однако в этом случае следует соблюдать осторожность, следя за тем, чтобы камера не упала со стола вниз!
Рис.5
Теперь необходимо рассчитать среднее значение (то есть значение высоты) при помощи следующего уравнения:
H=(A+B)/2
Поскольку теперь высота известна, можно расположить панорамную головку с установочным диском 3, как описано выше(см. Рис. 4).
4).
Регулировка по глубине – индивидуальна для каждого типа объектива ( то же самое касается регулировки и для разных значений фокусного расстояния выбранного объектива). То есть изменение фокусного расстояния — также предполагает регулировку нодальной точки по глубине. Регулировка нодальной точки производится путем ослабления винтов с насеченной головкой 1 либо 2 с одновременным перемещением штанги камеры вдоль ее манипулятора. Если требуемое значение уже определено (при помощи таблиц), его можно скорректировать по шкале 5. В противном случае, следует измерить приблизительное расстояние между гнездом головки штатива и кольцом управления диафрагмой линзы в миллиметрах. Необходимо отрегулировать вариообъектив на нужное фокусное расстояние. Это значение может использоваться как временное, однако позже необходимо будет произвести его подтверждение и выверку (см. ниже рис. 6).
У фотообъективов со средним по величине фокусным расстоянием нодальная точка расположена приблизительно на уровне ирисовой диафрагмы объектива, а нодальная точка у тех фотолинз, у которых фокусное расстояние удлиненное либо очень короткое – иногда располагается за пределами линз. При увеличении фокусного расстояния либо расстояния до объекта, роль, которую играет регулировка глубины, становится еще менее значимой. Поэтому крупные длиннофокусные объективы часто устанавливают в панорамной головке без выполнения надлежащей регулировки глубины.
При увеличении фокусного расстояния либо расстояния до объекта, роль, которую играет регулировка глубины, становится еще менее значимой. Поэтому крупные длиннофокусные объективы часто устанавливают в панорамной головке без выполнения надлежащей регулировки глубины.
Ниже приведено описание процедуры подбора точного значения глубины экспериментальным путем. Следовать указанной процедуре рекомендуется только тем пользователям, кто хорошо знаком со всеми нюансами по управлению панорамной головкой.
Выполнение расчетов такого рода может потребовать немного терпения при проведении систематического тестирования. В первую очередь, необходимо организовать «испытательный полигон», состоящий из объекта на большом расстоянии от Вас, и объекта, находящегося вблизи. То, какое расстояние выбрать, зависит от величины фокусного расстояния. Золотое правило для такого случая следующее: Максимально затемните линзу диафрагмой, чтобы получить большую глубину резкости, а затем выдерживайте фокусировку на бесконечность, отключив функцию автофокусировки. Нижний предел глубины резкости (см. кольцо управления диафрагмой) может использоваться в качестве искомого значения расстояния до приближенного объекта. Удаленный объект должен быть в два раза дальше, чем самое высокое заявленное значение фокусировки, имеющееся перед значением бесконечности. Должна обеспечиваться возможность соотнести оба объекта относительно друг друга. Классический способ заключается в следующем: Закрепите отвес со шнуром на оконную раму и используйте его в качестве приближенного объекта. В качестве удаленного объекта можно использовать конек крыши расположенного рядом здания, его бельведер или же опору высоковольтной линии (рис.6,А).
Нижний предел глубины резкости (см. кольцо управления диафрагмой) может использоваться в качестве искомого значения расстояния до приближенного объекта. Удаленный объект должен быть в два раза дальше, чем самое высокое заявленное значение фокусировки, имеющееся перед значением бесконечности. Должна обеспечиваться возможность соотнести оба объекта относительно друг друга. Классический способ заключается в следующем: Закрепите отвес со шнуром на оконную раму и используйте его в качестве приближенного объекта. В качестве удаленного объекта можно использовать конек крыши расположенного рядом здания, его бельведер или же опору высоковольтной линии (рис.6,А).
Теперь установите piXplorer с камерой на штатив на подходящей высоте. После включения piXplorer манипулятор камеры перемещается в горизонтальное положение. Затем переместите или поверните штатив так, чтобы оба объекта стали видны и при этом совмещены на левой стороне видоискателя камеры.
Если после этого медленно повернуть сервоприводную головку piXplorer в направлении налево (кнопка ◄), то оба объекта должны при этом сместиться к правому краю видоискателя камеры. При правильной регулировке глубины, положение двух объектов относительно друг друга будет оставаться прежним – они все так же должны совмещаться при достижении правого угла. В противном случае, Вам потребуется скорректировать глубину
– путем ее увеличения (переместив камеру назад), если более дальний объект можно наблюдать с левой стороны более близкого объекта,
– путем ее минимизации (переместив камеру вперед), если более дальний объект можно наблюдать с правой стороны более близкого объекта.
На рисунках ниже продемонстрирован параллакс с неверными настройками (Рис.6, В) и с правильно выполненными настройками (Рис.6,Б).
Рис.6
Полезный совет: Можно достичь результата, отличающегося еще большей точностью, если четко выполнять описанную выше процедуру, одновременно используя цифровой дисплей с соответствующей функцией масштабирования. Существует определенное соответствие между уже внесенными в значение глубины изменениями, выраженными в миллиметрах, и соответствующим сдвигом объектов в пикселях, поэтому нужную настройку можно без особого труда подобрать, если совершать систематические попытки с последующей интерпретацией.
Существует определенное соответствие между уже внесенными в значение глубины изменениями, выраженными в миллиметрах, и соответствующим сдвигом объектов в пикселях, поэтому нужную настройку можно без особого труда подобрать, если совершать систематические попытки с последующей интерпретацией.
Съёмка сферических панорам. Настройка панорамной головки
В этой стате мы разберемся как происходит настройка панорамной головки.
фото с сайта mospano.ru
Перед проведением съемки панорамную головку необходимо настроить под используемые фотоаппарат и объектив. Иначе ваша панорама будет собрана с видимыми швами и несостыковками, причем особенно отчетливо низкое качество сборки будет видно на панорамах небольших и средних размеров помещений.
Мы разберем пример с настройкой панорамной головки Nodal Ninja M1. Это универсальная панорамная головка позволяющая использовать любые зеркальные фотоаппараты и объективы.
Настройка сводится к нахождению беспараллаксной точки объектива (нодальной точки) с помощью смещения фотоаппарата, установленного на панорамную головку.
Визуально оценить нахождение беспараллаксной точки можно следующим образом: при повороте камеры, объекты в кадре не меняют взаимного расположения. Это отчетливо видно по объектам, которые располагаются друг за другом на разных планах.
Приступим.
Шаг № 1
Устанавливаем панорамную головку на штатив и крепим фотоаппарат к головке.
Установленная на штатив панорамная головка Nodal Ninja M1:
1.Верхний рельс; 2. Вертикальный рельс; 3. Нижний рельс; 4. Ротатор; 5. Уровневая база; 6. Штатив.
фото с сайта mospano.ru
Шаг № 2
Наклонив верхний рельс на 90 градусов, мы сможем совместить ось вращения панорамной головки и оптическую ось объектива. Сделаем это с помощью перемещения нижнего рельса панорамной головки. Контролировать соосность удобно по белой метки на ротаторе головки, используя режим LiveView.
фото с сайта mospano.ru
Шаг № 3
Для оценки нахождения беспараллаксной точки нам понадобятся два объекта. Например, это будут две батарейки, которые мы поставим на разные стороны стола. Можно использовать разные объекты на разных расстояниях. Главное, чтобы вы могли легко определить их взаимное расположение в кадре.
Можно использовать разные объекты на разных расстояниях. Главное, чтобы вы могли легко определить их взаимное расположение в кадре.
Шаг № 4
Установим штатив так, чтобы 2 батарейки находились на оптической оси объектива.
фото с сайта mospano.ru
Шаг № 5
Поворачивая панорамную головку влево-вправо мы увидим что, что то одна батарейка находится правее или левее, то другая.
Батарейки на одной линии
Поворот камеры влево. Дальняя батарейка левее
Поворот камеры вправо. Дальняя батарейка правее
фотографии с сайта mospano.ru
Изменяя положение фотоаппарата на верхнем рельсе панорамной головки, мы должны подобрать такое положение, при котором батарейки в кадре всегда будут находиться одна за другой.
Поворот камеры влево
Поворот камеры вправо
фотографии с сайта mospano.ru
Беспараллаксная точка объектива найдена, панорамная головка настроена.
© 2017 Кирилл Чернов, Mospano. ru — Виртуальные туры и 3D панорамы
ru — Виртуальные туры и 3D панорамы
Shooting spherical panoramas with a mirror / mirrorless camera. | 360° panorama articles | Andrey Mashkin
Последнее время на ресурсе truevirtualtours.com вижу некоторое количество работ разных фотографов, которые сталкиваются с некоторыми проблемами при съемке, последствиями которых являются появление большого количества засечек, сильных пересветов, заваленного горизонта и других проблем, избавиться от которых довольно легко, но фотографы этого не делают в силу разных причин.
По большей части именно для таких фотографов, как правило, начинающих, и я захотел написать небольшую инструкцию по съемке панорам, без претензий на 100% истину, я всего лишь опишу, как делаю это я, опираясь на опыт, который я подчерпнул у других фотографов и собственный опыт съемок многих тысяч панорам. Опытным фотографам тоже будет полезно сравнить свои методы с моими и сделать замечания либо дополнить мой опыт своими знаниями.
Весь процесс съемки панорам я разобью на несколько этапов. Я не буду глубоко разбирать каждый, но сделаю по возможности это доступно и имея понимание, что некоторые знания упомянутых процессов у начинающих фотографов все таки есть.
Итак
1) Подготовка и подбор оборудования. Начну с моего набора панорамщика: фотоаппарат Canon 5d mark IV, объектив Canon EF 8-15mm f/4.0L Fisheye USM. Штатив Manfrotto 190XPROB, панорамная головка Nodal Ninja 4.
Сразу же отмечу, что данный набор ни в коем случае не служит ориентиром или каким-то образцовым набором: снимать панорамы можно практически на любой фотоаппарт, любой объектив, штатив и панорамную головку. Отмечу лишь преимущества объектива, который мне позволяет регулировать фокусное, и таким образом снимать одним объективом как быстрые панорамы на 8 мм в 3-4 кадра, так и более детализированные панорамы в 8-12 кадров на 15мм. То есть я снимаю на разное фокусное расстояние в зависимости от задачи съемки. Также отмечу панорамную головку, основным преимуществом для меня которой является наличие адаптера для съемки надира. Наличие такого адаптера очень сильно облегчает съемку и ретушь надира. К штативу особенных требований нет, кроме того, что бы он был достаточно тяжелый и устойчивый, так как набор «фотоаппарат-панорамная головка» довольно тяжелый. Ну и естественно, что бы его высоты хватало на съемку от 150-160 см от поверхности с учетом высоты панорамной головки. Из своего опыта могу сказать что нужный штатив можно купить примерно от $60.
Также отмечу панорамную головку, основным преимуществом для меня которой является наличие адаптера для съемки надира. Наличие такого адаптера очень сильно облегчает съемку и ретушь надира. К штативу особенных требований нет, кроме того, что бы он был достаточно тяжелый и устойчивый, так как набор «фотоаппарат-панорамная головка» довольно тяжелый. Ну и естественно, что бы его высоты хватало на съемку от 150-160 см от поверхности с учетом высоты панорамной головки. Из своего опыта могу сказать что нужный штатив можно купить примерно от $60.
После того, как у Вас появился примерно аналогичный набор «камера-объектив-головка», следующий важный шаг, который необходимо сделать, это правильно найти нодальную точку. Важность этого шага невозможно переоценить, так как от правильно найденная нодальная точка Вашего набора позволит снимать панорамы с минимумом засечек в дальнейшем, что будет экономить Ваше время в ретушировании.
Для поиска нодальной точки я пользовался ресурсом https://wiki. panotools.org/Entrance_Pupil_Database, который дает очень хорошее начальное приближение, отталкиваясь от которого в ручном режиме я уже точно нашел значения для своего набора. Не буду описывать множество методов и инструкций нахождения нодальной точки, они есть в большом количестве на Ютубе и других ресурсах.
panotools.org/Entrance_Pupil_Database, который дает очень хорошее начальное приближение, отталкиваясь от которого в ручном режиме я уже точно нашел значения для своего набора. Не буду описывать множество методов и инструкций нахождения нодальной точки, они есть в большом количестве на Ютубе и других ресурсах.
Перед съемкой Вам нужно понять правильную схему съемки панорамы исходя из набора «фотоаппарат-объектив», то есть количество снятых кадров и количество рядов съемки. Для нахождения правильной схемы я использую удобный калькулятор https://panocatcher.com/panoplanner/.
В моем случае я чаще всего снимаю в 4-6 кадров в один ряд + надир. Зенит чаще всего не снимаю (только если это не небо на улице когда быстро плывут облака, либо красивая люстра на потолке, которая заслуживает отдельного кадра зенита). Для того, чтобы не снимать зенит, я поднимаю при съемке примерно на 5-7 градусов фотоаппарат выше чем уровень горизонта, тем самым обеспечиваю хорошее пересечение всех кадров на месте надира. Это хорошо работает для 10-12мм фокусного расстояния.
Это хорошо работает для 10-12мм фокусного расстояния.
2) Процесс съемки. Итак, Вы определились со схемой съемки исходя их вашего набора, правильно настроили головку под нодальную точку и готовы снимать. Здесь у каждого фотографа есть свои методы, я не буду в них вдаваться, а просто опишу, как это делаю я, опять же без претензий на «истинность в последней инстанции».
Снимать нужно только в ручном режиме камеры (для Canon это режим «М»). Снимаем в RAW. Настройки фокуса переводиться в ручной режим и в моем случае устанавливаются, где то между 1м и бесконечностью. В Вашем случае настройки фокуса находиться опытным путем. ISO переводим в ручной фиксированный режим и стараемся оставить его минимальным. В моем случае большинство панорам снято с ISO = 100-200, если уж помещение сильно темное и Вы знаете что наличие небольшого количества шумов не принципиально, то можно снимать и более высокими значениями 400-800 и т.д. Здесь нужно исходить из возможностей Вашей камеры справляться с шумами. Баланс белого можно либо оставить фиксированным, либо снимать в автоматическом режиме, так как в дальнейшем можно это поправить при проявке. Я снимаю с брекетингом для дальнейшей сборки HDR-кадра, 3 или 5 кадров в зависимости от ситуации. Без брекетинга снимаю только уличные панорамы. Если брекетинг три кадра, то с шагом экспозиции(-2 0 +2) или (-2,5 0 +2,5) или даже (-3 0 +3). Все зависит от помещения, наличия резких перепадов в освещенности и т.д. При съемке в 5 кадров, чаще всего шаг экспозиции (-4 -2 0 +2 +4). Эти все значения Вы находите сами исходя из Вашего опыта в съемках. Диафрагму при съемке я выставляю от 8 до 11, в зависимости от места съемки. Если Вы любите чтобы на кадрах были красивые «звездочки» от точечных источников освещение, то прикрывайте диафрагму вплоть до 14, хотя я в принципе не рекомендую значения диафрагмы больше 11.
Баланс белого можно либо оставить фиксированным, либо снимать в автоматическом режиме, так как в дальнейшем можно это поправить при проявке. Я снимаю с брекетингом для дальнейшей сборки HDR-кадра, 3 или 5 кадров в зависимости от ситуации. Без брекетинга снимаю только уличные панорамы. Если брекетинг три кадра, то с шагом экспозиции(-2 0 +2) или (-2,5 0 +2,5) или даже (-3 0 +3). Все зависит от помещения, наличия резких перепадов в освещенности и т.д. При съемке в 5 кадров, чаще всего шаг экспозиции (-4 -2 0 +2 +4). Эти все значения Вы находите сами исходя из Вашего опыта в съемках. Диафрагму при съемке я выставляю от 8 до 11, в зависимости от места съемки. Если Вы любите чтобы на кадрах были красивые «звездочки» от точечных источников освещение, то прикрывайте диафрагму вплоть до 14, хотя я в принципе не рекомендую значения диафрагмы больше 11.
Опять же оптимальное значение диафрагмы нужно находить исходя из объектива и глубины резкости. Я буду считать, что в большинстве случаев значения от 8 до 11 оптимальны.
Для спуска затвора камеры я использую пульт, так как важно, чтобы в момент съемки были исключены любые прикосновения к камере и штативу, чтобы избежать смазанных кадров. При отсутствии пульта можно снимать с таймером, который присутствует в большинстве камер, что позволит Вам не касаться камеры и штатива при съемке.
Штатив я выставляю с довольно близко расставленными ногами, в моем случае расстояние между ногами штатива примерно 40см. Такая узкая расстановка ног хоть и снижает устойчивость конструкции, зато позволяет с меньшими проблемами и ретушью справляться с надиром. Тем более в момент съемки я нахожусь всегда рядом и контролирую устойчивость всей конструкции. Съемку стараюсь производить примерно с положения глаз человека среднего роста, то есть примерно 160см+-10см. Хотя исхожу из высоты потолка помещения и стараюсь поднять точку сьёмки выше, если потолок высокий и опускаю ниже, если потолок очень низко. Проверяю правильный уровень относительно горизонта (хотя могу допустить небольшие отклонения, которые исправляю при сшивке панорамы).
3) Проявка, сшивка, надир, ретушь. Этот пункт хотя и очень объёмен в жизни, но здесь я коснусь лишь общих моментов, так как большинство вопросов по проявке и ретуши есть в большом количестве в сети.
Проявка: я проявляю и готовлю HDR кадры в программе Adobe Lightroom. Тем более после того, как стала возможна массовая проявка HDR стеками, эту программу я считаю лучшей для HDR именно для панорамщика, так как мне важно чтобы процесс HDR проходил быстро и с моим минимальным вмешательством в процесс. В моем случае я разбиваю все отснятые RAW по стекам по 3 кадра или по 5 в зависимости от той схемы брекетинга с которым снимал. Для этого удобно формировать стеки по времени съемки, так как в большинстве случаев на съемку трех кадров из брекетинга у Вас уходит около 3 секунд. Выставив в настройках сборки стеков время 3 секунды Вы наверняка получите ровные стеки по 3 кадра. Затем выделяю все полученные стеки и запускаю создание HDR. Через некоторое время я получаю готовые негативы HDR в формате DNG, которые уже готовлю непосредственно для экспорта в удобный формат для сшивки панорам. Если есть необходимость дальнейшую проявку файлов DNG можно производить в программе Capture One.
Если есть необходимость дальнейшую проявку файлов DNG можно производить в программе Capture One.
Сшивка, надир: после вывода кадров HDR в формат tif или jpg, я сшиваю полученные кадры в панораму в программе PTGui. В этой же программе вставляю отснятый надир при помощи адаптера надира на моей головке. Функция «viewpoint correction» в PTGui справляется со вставкой надира практически идеально. Так же здесь я корректирую наклон горизонта.
Ретушь: После вывода панорамы из PTGui остается довести до ума ее в редакторе, в моем случае Adobe Photoshop. Убрать засечки, если они есть, подправить цвет/свет.
На этом собственно все, и теперь готовый файл панорамы Вы можете загрузить на сайт True Virtual Tours или другой ресурс, или собрать из панорам виртуальный тур в специальных программах. Желаю всем панорамщикам удачных съемок красивых панорам!
Мастер-классы
Уникальный практический курс для начинающих фотографов ! Доступная теория «без воды» и практика на реальных сюжетах.
Стоимость практического курса по фотографии 8000 руб/группа
(набирается маленькая группа 6 человек , занятия индивидуальные и в группе )
Теория (6 часов) -«без воды»-только самое важное!
Рассматриваются в доступной форме основные понятия от самых азов: настройка вашей камеры, основные понятия (диафрагма, выдержка, экспозиция, ISO, баланс белого и пр) до основ композиции и построения снимка.
Практика (12 часов ) -на реальных сюжетах!
Мы поделимся с Вами секретами профессиональной фотосъемки в путешествии — подробно, наглядно и доступно, на реальных сюжетах, под руководством фотографа-инструктора
Обработка (3 часа)
Покажем быстрые и эффективные приемы обработки фотоснимков и устранение возможных недостатков на фотографии (Lightroom + photoshop)
Подробная программа практического экспресс курсаУрок №1 «Настройка вашей фотокамеры.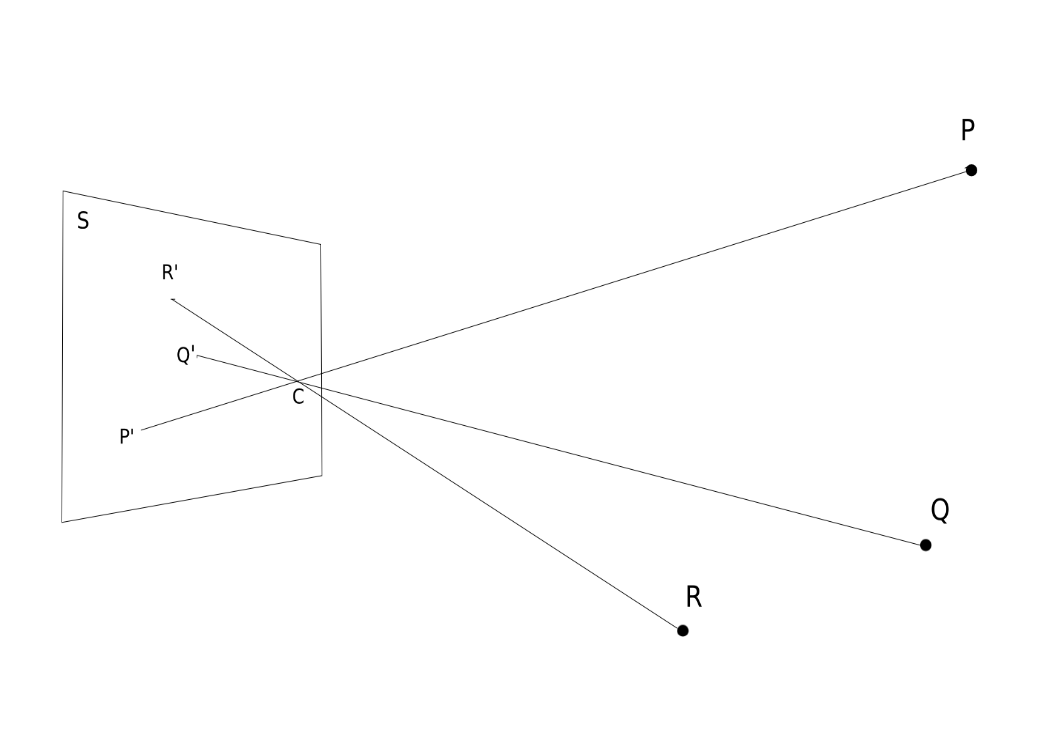 Основные понятия: диафрагма, выдержка, ISO, баланс белого. Что необходимо знать о своей фототехнике
Основные понятия: диафрагма, выдержка, ISO, баланс белого. Что необходимо знать о своей фототехнике
«Урок №2 «Экспозиция и режимы фотосъемки». Выполнение индивидуального задания по программе фотокурса.
Фотосъмка в режимное время самостоятельно или с инструктором.
Урок №3 «Основы композиции».
Урок №4 «Особенности фокусировки». Выполнение индивидуального задания по программе фотокурса
Практическое занятие по фотосъемке в сопровождении инструктора или самостоятельно
Урок №5 «Оптимальное время для фотосъемки. Фотосъемка закатов и рассветов.
«Урок №6″Фотосъемка в «плохую» погоду»Практическое занятие по фотосъемке в сопровождении инструктора или самостоятельно
Фотосъемка заката
Урок №7 «Конвертация и обработка фотографий»
Урок №8 «Вопросы-ответы по курсу»
Практическое занятие по обработке фотографий (с инструктором). Выполнение индивидуального задания во программе фотокурсаПодведение итогов:За время курса вы научитесь использовать потенциал своей камеры, снимать в ручных режимах, выбирать оптимальную композицию снимка и точку съмки для получения отличных фотографий, делать эффектную обработку своих фотоснимков за несколько минут.
Статья Глоссарий панорамного фотографа
Autopano Pro
Autopano Pro – программа для автоматического сшивания панорам, в том числе виртуальных сферических панорам. Имеет качественный алгоритм расстановки контрольных точек, пакетный режим работы, поддержку HDR, fisheye-объективов и т.д. Однако отсутствие гибкой ручной настройки накладывает существенные ограничения на богатые декларируемые возможности.
Сайт: http://www.autopano.net/
Circular fisheye
Circular fisheye – см. «Fisheye»
DevalVR
DevalVR – плеер, который позволяет просматривать сферические и цилиндрические виртуальные панорамы, воспроизводить виртуальные туры. Поддерживает QTVR-формат, панорамы в эквидистантной и кубической проекциях. Отличается малым размером и великолепным качеством изображения. Существует как в виде плагина для браузеров (IE, Opera, Farеfox, NN), так и в виде отдельной программы, не требующей инсталяции.
DevalVR-скрипт
DevalVR-скрипт – скриптовый язык, позволяющий с помощью DevalVR-плеера использовать дополнительные возможности при просмотре виртуальных панорам (авторотация, настройка интерфейса, ограничение углов обзора и т.д.) а также организовывать отдельные виртуальные сферические панорамы в виртуальный тур.
Drum fisheye
Drum fisheye – см. «Fisheye»
DFOV
DFOV – Diagonal Field Of View – угол обзора объектива по диагонали.
DOF
DOF (Depth Of Field) – глубина резко изображаемого пространства.
Entrance pupil
Entrance pupil — см. входной зрачок объектива.
«Fisheye»
«Fisheye» («Рыбий глаз») – это сверхширокоугольный объектив с неисправленной дисторсией, у которого линейное расстояние от центра кадра до элемента изображения на пленке/матрице пропорционально угловому расстоянию этого же элемента в реальности от оптической оси объектива.
По признаку, какая часть круга изображения, формируемого объективом, попадает на пленку/матрицу, различают 3 вида фишай-объективов:
- Circular (круговой, циркулярный) fisheye – HFOV = 180° и VFOV = 180°
- Drum (бочкообразный) fisheye – HFOV = 180° но VFOV < 180°
- Full frame (полнокадровый) fisheye — DFOV = 180°
Flash
Flash — универсальный формат мультимедиа-файлов в Интернете. Разработка компании Macromedia, в настоящее время перекуплена компанеей Adobe. Начиная с версии Flash 8 появилась возможность воспроизведить полноэкранные виртуальные сферические панорамы и виртуальные туры. Для качественного просмотра требует достаточно мощных компьютеров.
FOV
FOV (Field Of View) – угол поля зрения объектива.
Full frame fisheye
Full frame fisheye – см. «Fisheye»
HFOV
HFOV (Horizontal Field Of View) – угол обзора объектива по горизонтали (по длинной стороне кадра).
iPIX / IPIX
iPIX – фирма, занимающаяся патентным терроризмом на рынке панорамного обеспечения. Долгое время считала, что только её разработки имеют право изготавливать панорамы из изображений, полученных объективами «Fisheye». На сегодняшний день этот скользкий патент в Европе отозван, а сама фирма является банкротом.
iPIX-панорамы
iPIX-панорамы – виртуальные панорамы для просмотра через виртуальную машину Java, требуют специального (отдельно устанавливаемого) Java-аплета и характеризуются весьма посредственным качеством. Однако, несмотря на моральное устаревание технологий и низкое качество самих панорам, и на сегодняшний день iPIX достаточно распространен.
Java-апплет
Java-апплет — программный компонент в двоичном коде виртуальной машины Java, исполняется в окне Интернет-браузера, в целях безопасности изолирован от основной системы. На базе Java-апплетов реализованы некоторые программы просмотра панорам, в частности iPIX.
Java-VM (виртуальная машина Java)
Виртуальная машина Java — программа, интерпретирующая и исполняющая Java-апплеты. Виртуальная машина Java в реализации Microsoft имеет проблемы с безопасностью и падением производительности при больших нагрузках. В результате многочисленных судебных тяжб Sun и Microsoft, судьба виртуальной машины Java на платформе Windows в настоящее время представляется туманной.
NPP
NPP (No-Parallax Point, center of perspective, центр перспективы) – точка на оптической оси объектива, являющаяся центром входного зрачка. В cлучае, если при панорамной съемке оси вращения пересекаются в NPP, то параллакс не проявляется.
pano12.dll
pano12.dll – основная библиотека, ядро PanoTools, в файле содержатся алгоритмы преобразований искажений объектива. В некоторых дистрибутивах PanoTools в файл внесено ограничение на использование объективов типа «Fisheye». В зависимости от операционной системы возможны варианты названий: pano12. dll, libpano12.so, libpano12.dylib и pano12.lib.
dll, libpano12.so, libpano12.dylib и pano12.lib.
Неофициальный сайт: http://www.photocreations.ca/panotools/
Pano2QTVR
Pano2QTVR — программа для конвертирования эквидистантной и кубической проекций виртуальных сферических панорам друг в друга а также в форматы QTVR, Flash 8, SPi-V, проекции полярных координат. Также может создавать VR-объекты. Есть бесплатная версия. Версия PRO может вставлять в QTVR- и Flash-панорамы хотспоты, что позволяет создавать виртуальные туры.
Сайт: http://gardengnomesoftware.com/
Pano2VR
Pano2VR — дальнейшее развитие программы-конвертора Pano2QTVR. Имеет более интуитивно понятный интерфейс. На сегоднешний день лишена возможности создавать VR-объекты, однако появилась возможность конвертировать панорамы не только во Flash 8, но и во Flash 9 и HTML5.
Сайт: http://gardengnomesoftware.com/
PanoTools
PanoTools (Panorama Tools) – первый программный пакет, позволяющий гибко управлять дисторсией объективов и получать панорамы в разных проекциях. Автор программы – профессор физики Хельмут Дерш (Helmut Dersch) – из-за патентных разборок с iPIX прекратил поддержку своего проекта, однако на ядре PanoTools созданы другие панорамные программы, в т.ч. PTGui.
Автор программы – профессор физики Хельмут Дерш (Helmut Dersch) – из-за патентных разборок с iPIX прекратил поддержку своего проекта, однако на ядре PanoTools созданы другие панорамные программы, в т.ч. PTGui.
Pitch
Угол поворота камеры вокруг горизонтальной оси (вверх-вниз).
PTGui
PTGui – одна из наиболее продвинутых программ для изготовления панорам. Поддерживает HDR, ручную и автоматическую расстановку контрольных точек, различные типы панорамных проекций (плоскостная, цилиндрическая, эквидистантная, проекции полярных координат). Есть экспорт в JPEG-файлы, QTVR и SPi-V.
Сайт: http://www.ptgui.com/
QTVR
QTVR – адаптация MOV-формата для просмотра виртуальных панорам, созданный фирмой Apple. Исторически является первым форматом, позволяющим просматривать панорамы в полный экран с хорошим качеством. MOV-файлы представляют собой «контейнер», в котором помимо панорамных изображений может содержаться музыка, видео и спрайты.
QuickTime
QuickTime – программа-плеер от Apple, позволяющая (помимо прочего) просматривать виртуальные панорамы в QTVR-формате с хорошим качеством. Возможно корректное воспроизведение панорам с углом обзора меньшим 360°.
Realviz Stitcher
Realviz Stitcher — програмный продукт, позволяющий выполнять все этапы создания панорам: от сшивки до расстановки хотспотов. Есть поддержка fisheye-объективов, HDR сшивки, конвертирование во Flash, QTVR, IVP.
Ссылка: http://www.realviz.com/products/st/index.php
Roll
Вращение изображения вокруг оси камеры (против или по часовой стрелке).
Shockwave Player
Shockwave Player — альтернативный продукт от Adobe для интерактивного мультимедиа контента. Может быть также использован для просмотра виртуальных туров и сферических панорам. Для отображения панорам использует формат SPi-V.
Smartblend
Smartblend — интеллектуальная программа-блендер, способная выравнивать соседние кадры при сшивке по освешенности и цветовой температуре, в ряде случаев неплохо маскирует параллакс. В качестве плагина или составной части используется в Autopano Pro, PTGui, PTAssembler, Realviz Stitcher.
В качестве плагина или составной части используется в Autopano Pro, PTGui, PTAssembler, Realviz Stitcher.
Скачать http://smartblend.panotools.info/
Spherical map (texture)
Spherical map – название эквидистантной проекции в 3D-моделировании.
SPi-V
SPi-V — формат панорамных файлов для Shockwave Player. Представляет собой 6 изображений кубической проекции, поставленных столбиком друг на друга и сохраненных с jpeg-сжатием.
VFOV
VFOV (Vertical Field Of View) – угол обзора объектива по вертикали (по короткой стороне кадра).
VR
VR — виртуальная реальность, Virtual Reality. Употребляется часто в качестве составной части сокращений, например, QTVR — QuickTime Virtual Reality.
VR-объект
VR-объект — несколько фотографий объединенных в 1 файл и демонстрирующих движение (вращение, как наиболее частый варинат для предметной съемки) какого-либо объекта.
Yaw
Угол поворота камеры вокруг вертикальной оси (влево-вправо).
Авторинг
Авторинг – процесс объединения нескольких отдельных виртуальных панорам в один готовый проект (например, виртуальный тур), насыщения панорам активными зонами, звуковым сопровождением, Flash-анимацией, видеороликами и другими мультимедийными элементами, подключение авторотации и автоперехода между отдельными панорамами, а также встраивание виртуальных панорам в презентационные оболочки или интернет-страницы.
Активная зона
Активная зона (она же точка перехода, хот-спот) – место на виртуальной панораме, по наведении на которое или щелчку на нем выполняется какое-либо действие: переход к другой панораме в виртуальном туре или запуск анимации, музыкального сопровождения и др.
Виртуальная панорама
Виртуальная панорама – 360-градусное изображение окружающего пространства, приспособленное для просмотра на плоском мониторе компьютера. Может быть сферической (360° по горизонту и 180° от зенита до надира) и цилиндрической (также 360° по горизонту, но неполный охват по вертикали).
Может быть сферической (360° по горизонту и 180° от зенита до надира) и цилиндрической (также 360° по горизонту, но неполный охват по вертикали).
Виртуальный тур
Виртуальный тур – несколько виртуальных панорам, объединенных активными зонами перехода из одной в другую. Помимо этого может включать статичные фотографии, музыкальное сопровождение, Flash — и видеоролики и т.п.
Входной зрачок объектива
Входной зрачок объектива (entrance pupil) – плоскость, перпендикулярная оптической оси объектива и являющаяся виртуальной диафрагмой. Отношение фокусного расстояния объектива к диаметру входного зрачка определяет f-число.
ГРИП
ГРИП – глубина резко изображаемого пространства. Зависит от диафрагмы объектива, разрешающей способности матрицы фотокамеры или плёнки а также масштаба изображения (производная расстояния до объекта и фокусного расстояния объектива).
Зенит и надир
Зенит и надир – верх и низ соответственно. Надир — вниз от горизонта на 90 градусов, зенит — вверх от горизонта на 90 градусов.
Надир — вниз от горизонта на 90 градусов, зенит — вверх от горизонта на 90 градусов.
Интерполяция
Интерполяция — расчет недостающих пикселей на изображении (которые обрауются, например, при изменении одной панорамной проекции на другую) по соседним.
Контрольные точки (КТ)
Контрольные точки (сокращенно: КТ) – идентичные точки на снимках, снятых с перекрытием, которые используются для сшивки отдельных фотографий в одно панорамное изображение.
Кубическая проекция
Кубическая проекция – проекция сферы на стороны куба, одна из базовых проекций при изготовлении виртуальных сферических панорам. Изображение в кубической проекции имеет минимальные искажения, эквивалентные съемке широкоугольным объективом.
Многорядная панорама
Многорядная панорама — панорама, съемка которой осуществлялась в несколько рядов кадров.
Надир
Надир – см. зенит и надир.
Нодальная точка
Нодальная точка – одна из двух точек в оптической схеме объектива, для практической фотографии интереса не представляет. В абсолютном большинстве современных многолинзовых объективах нодальная точка не совпадает с NPP (No-Parallax Point) и входным зрачком объектива, однако часто эти понятия ошибочно (или из патерналистических побуждений) подменяют друг друга.
Однорядная панорама
Однорядная панорама — панорама, съемка и последующая сшивка которой которой производилась из фотографий в один ряд.
Оптическая ось объектива
Оптическая ось объектива — воображаемая линия, проходящая через центр отверстия диафрагмы и перпендикулярная плоскости пленки или цифровой матрицы фотокамеры.
Панорамная головка
Панорамная головка – штативная головка, которая позволяет совмещать NPP с центром вращения при вращени фотокамеры с объективом в горизонтальной плоскости (по вертикальной оси). Пример: Manfrotto 303 Plus.
Пример: Manfrotto 303 Plus.
Параллакс
Параллакс – видимое изменение взаимоположения предметов вследствие перемещения наблюдателя.
«Рыбий глаз»
«Рыбий глаз» — объектив типа «Fisheye».
Сверхширокоугольный объектив
Сверхширокоугольный объектив — объектив, у которого фокусное расстояние менее узкой стороны пленки или матрицы. Для камер 35-мм формата — менее 24 мм, для камер APS-C — менее 15 мм.
Сферическая панорама
Сферическая панорама – см. Виртуальная панорама
Сферическая панорамная головка
Сферическая панорамная головка – штативная головка, которая позволяет осуществлять сдвиг фотокамеры в трех плоскостях для позиционирования NPP относительно осей вращения и осуществлять повороты (минимум) по двум осям. Пример: Manfrotto 303 SPH.
Сферическая текстура
Сферическая текстура – название эквидистантной проекции в 3D -моделировании.
Сшивка
Сшивка – процесс объединения нескольких отдельных фотографий в одно панорамное изображение. При создании виртуальных сферических панорам в результате сшивки, как правило, получают эквидистантную проекцию.
Цилиндрическая панорама
Цилиндрическая панорама – панорама в которой используется цилиндрическая проекция. См. также Виртуальная панорама
Цилиндрическая проекция
Цилиндрическая проекция – проекция усеченной сферы на прямоугольник. В данной проекции и вертикальныелинии остаются прямыми, а горизонтальные — изогнуты. Это одна из основных проекций виртуальных панорам.
Шифт-объектив
Шифт-объектив — объектив со сдвигом оптической оси, применяется для компенсации или усиления перспективных искажений. Эффект шифт-объективов может быть заменен съемкой с использованием более короткофокусной оптики и последующей сшивкой с использованием панорамных программ, например, PTGui.
Шифт-адаптер
Шифт-адаптер — переходник, позволяющий осуществлять сдвиг оптической оси на обычном объективе.
Широкоугольный объектив
Широкоугольный объектив – объектив, у которого фокусное расстояние меньше диагонали кадра. Для 35-мм камер обычно считается 35 мм и менее, для камер ASP-C – 28 мм и менее.
Эквидистантная проекция
Эквидистантная проекция – проекция сферы на прямоугольник с соотношением сторон 2:1. В данной проекции вертикальные линии остаются прямыми, а горизонтальные приобретают специфические дугообразные искажения. Эквидистантная проекция является базовой при cшивке фотографий для изготовления сферических виртуальных панорам.
35-мм камера
35-мм камера — формат камер, у которых размер формируемого изображения равен 24х36 мм, что равно изображению на пленке шириной 35 мм (узкой пленке, пленке 135-го форамта)
360х180
360°х180° – угловой размер эквидистантной проекции. Применяется для демонстрации того, что данная панорама является полной сферической панорамой.
360х360
360°х360° – угловой размер двух полных сфер. Как правило, под этим термином подразумевается стандартная виртуальная панорама с углом обзора 360°х180°.
3D-головка
3D-головка – штативная головка, которая позволяет осуществлять наклоны по трем осям. С подачи производителей иногда ошибочно путается с панорамной головкой или даже со сферической панорамной головкой. Слово «панорамная» 3D-головка свидетельствует лишь о том, что возможно изолированное вращение вокруг вертикальной оси, но не позиционирование NPP относительно осей вращения. Для съемки сферических панорам и изготовления виртуальных туров 3D-головка подходит крайне слабо.
ПОИСК БЕЗПАРАЛЛАКСНОЙ ТОЧКИ | |||
1. ПАРАЛЛАКС И ВХОДНОЙ УЧЕНИК Поднимите ручку впереди из вас, закройте один глаз и сосредоточьтесь на фоне сцена, когда вы двигаете головой в сторону слева направо. Ручка будет видно, что он перемещается влево относительно фона.Нравиться это: Это очевидное изменение в положении ближнего пера есть эффект, называемый параллаксом. Это просто чтобы увидеть, что если вы наложите эти две фотографии, чтобы выровнять соответствующие вы можете либо выровнять фоновые элементы, либо перо. Вы не можете выровнять и то, и другое одновременно. Идеально, поэтому, делая фотографии для сшитой панорамы, вы нужно делать все снимки с одной точки, чтобы рядом объекты не меняют свое положение на фоне последовательно выстрелы.Это значительно облегчит задачу присоединения к изображения без проблем, чтобы сформировать идеальное панорамное изображение. Следовательно, «глаз» камеры нужно держать в постоянном положение, когда камера поворачивается, чтобы указывать в другом направлении за каждый выстрел. Как ученик Ваш глаз — это центр мира, который он видит, поэтому входной зрачок объектива камеры является центром сцены, которую он видит.Примерно в этом месте вы хотите повернуть камеру. Точку иногда называют точкой без параллакса (, АЭС ). Раньше считалось, что идеальная точка поворачивать камеру вокруг было переднее узловое очко т линзы. Теперь было показано, что это неверно (см. ссылку ниже), но в качестве методов, обычно разрабатываемых для поиска «узловая точка» на самом деле определяет местонахождение входного зрачка, результаты в порядке.Просто неправильно называть точку так найденную «узловая точка», которая представляет собой совершенно другую точку в системе линз и вообще в другом положении. Роза под любым другим именем ….. NB. Хотя выше относится строго к стандартным прямолинейным линзам, линзам типа «рыбий глаз» не соответствуют в точности этой модели, как описано в примечании на конец этого урока. Однако настройка панорамной головки процедуры аналогичны. 2. ОШИБКИ СШИВАНИЯ И ПАРАЛЛАКС Неспособность повернуть камера около входного зрачка, скорее всего, приведет к видимому ошибки сшивки. Однако не думайте, что если вы видите ошибки склейки ваших панорам, которые обязательно связаны с параллакс. Вы можете идеально установить камеру на Избегайте параллакса и по-прежнему возникают ошибки сшивания.Причина из ошибок сшивания может быть плохая коррекция искажений линзы или плохо размещенные контрольные точки в PTGui. Движение облаков ветки деревьев и т. д. также могут вызвать проблемы. Ты можешь быть возможность минимизировать ошибки сшивания или даже полностью скрыть их интеллектуальным смешиванием — либо вручную (путем редактирования слоя маски в многослойном файле .psd) или автоматически (с помощью блендера например Smartblend). Итог что если вы хотите проверить, правильно ли настроена ваша камера, Избегайте параллакса, тогда вам следует провести несколько тестов, специально разработанных чтобы выявить наличие параллакса. | |||
3. ПРЯМОЙ ПОДХОД — ТОЛЬКО ДЛЯ SLR Нахождение без параллакса точка несложная, особенно в случае большинства одиночных линз. зеркальные камеры, для которых входной зрачок может быть легко видно как яркое пятно или диск, когда вы наводите видоискатель (т.е. сзади фотоаппарата) при ярком свете и просто посмотрите в объектив. Остановите объектив, скажем, до f / 16 и удерживайте кнопку предварительного просмотра глубины резкости на камере (если есть один). Благодаря трехмерному зрению, обеспечиваемому вашими двумя глазами, это легко судить о примерном положении яркого пятна: просто проведите пальцем по оправе объектива до точки, где кажется быть на таком же расстоянии.Если вам трудно увидеть яркий пятно или диск, просто направьте заднюю часть камеры на небо и посмотрите в переднюю часть линзы. (С объективом «рыбий глаз» он на самом деле нет необходимости останавливать диафрагму, так как пятно будет быть совсем маленьким даже с широко открытой диафрагмой). Это приводит к роману способ регулировки положения камеры на панорамной головке — просто наблюдайте за входным зрачком, когда вы поворачиваете камеру, и проверьте, нет ли боковое движение пятна.Подходит для короткофокусных линз. например, рыбий глаз. | |||
Но сначала нужно установить положение камеры по горизонтали рука головы так, чтобы входной зрачок был выровнен по бокам с осью вращения. Для этого можно повернуть камеру. указывать вертикально вниз.Затем точка оси головы (например, центральный регулировочный винт на головке Nodal Ninja 3) должен располагаться по центру кадра изображения. Возможно, вы не сможете сосредоточиться достаточно близко к некоторым линзам, чтобы выполнить эту настройку, но вы можете временно переключиться на другой объектив. В качестве альтернативы, с выровненной головой можно произвести визуальный осмотр входа определить точку зрачка с помощью отвеса, проведенного перед линзой.Пятно центр регулировочного винта должен быть выровнен по вертикали, как показано здесь. (Резьба была приклеена к верхней части линзы. просто сфотографировать. Вы можете просто провести нить в твердая рука). | |||
Ан. указание на то, что боковое положение не совсем правильное — сломано, от края пилообразной до головы в надире в вышитой панораме ( непропатченный надир, конечно).Пример справа — это типичный пример: Верх головы чем-то напоминает циркулярную пилу. В этом случае «зубы» настроены на резку при вращении пилы по часовой стрелке. Этот указывает, что входной зрачок смещен влево от панорамы ось головы, если смотреть сзади камеры, поэтому камера нужно сместить немного вправо. Если пила настроена на резка с вращением против часовой стрелки, тогда камере нужно сдвинуть влево. | |||
Далее вам понадобится разработать какое-то прицельное приспособление для обеспечения фиксированной ссылки точка при проверке движения светлого пятна входа ученица. Это простое зрелище, которое можно сделать за пару минут иглой и полоской картона: | |||
Я также использовал пустой тубус шариковой ручки, установленный перед объективом так, чтобы яркое пятно появляется в центре отверстия в конце, когда вы всматриваться в него.Если пятно смещается влево при повороте камеру по часовой стрелке, то входной зрачок находится перед ось вращения и нужно немного сдвинуть камеру назад. Если он перемещается вправо, затем вы хотите переместить камеру вперед. Если пятно остается неподвижным, входной зрачок находится без параллакса. точка. Это показывает то, что вы видите, когда камера находится слишком далеко. на верхней направляющей: Сдвинуть положение камеры вперед и назад, пока не будет разницы во входном зрачке положение, когда камера поворачивается из одного нормального положения съемки к следующему, e.грамм. по рысканию -30 и +30 градусов, если сделать 6 выстрелов с шагом 60 градусов для покрытия 360 градусов. Быстрый способ для настройки камеры необходимо сначала отцентрировать входной зрачок в прицел для положения рысканья = 0. Затем поверните камеру в рыскание = 30 и сдвиньте камеру по верхней направляющей, чтобы входной зрачок снова выровняется с прицелом. Проверить рыскание = -30 положение и готово: Главное состоит в том, что входной зрачок находится в одинаковом положении под каждым углом рыскания, e.грамм. +30 и -30. Любая смена входного ученика между двумя углами не имеет значения, особенно в случае линз типа «рыбий глаз», как описано в примечании в конце. Проверить, что вход зрачок расположен на оси верхнего ротатора, верхний поворот рельс на 180 градусов, а нижний рельс на 180 градусов так, чтобы камера снова направляет прямо вперед — вот так (другая голова на этот раз): Использовать прицел как раньше чтобы убедиться, что вертикальное положение пятна остается прежним.Это хороший способ проверить правильность горизонтального положения. тоже правильно. | |||
4. БОЛЬШЕ ТРАДИЦИОННОГО МЕТОД Самый точный метод Я обнаружил, что в основном это то же самое, что и многие другие, описанные в другом месте. Вы просто делаете два перекрывающихся снимка, как при съемке панорамы, но стрелять через окно, глядя на далекую сцену.Палка короткий кусок скотча на окно в середине перекрытия области, с камерой примерно в 50 см и остановленной до f / 22. (Убедитесь, что штатив стоит на твердой опоре, чтобы избежать раскачивания камеры и головы). Все, что вам нужно сделать, это проверить положение ленты на фоне в двух кадрах. Это кадры, показывающие перекрытие на двух изображениях «рыбий глаз»: Сравнение изображений в фотошопе вообще прямолинейно.Это помогает, если вы накладываете изображения и выровняйте их так, чтобы включить верхний слой и off показывает движение ленты. Камера была повернута Л-П для этих снимков. Понятно, что входной ученик переместился в справа, так как вы можете видеть немного больше с правой стороны ленты и меньше с левой стороны. Это означает входной зрачок находился перед осью вращения, поэтому камера нужно отодвинуть немного назад.Сделайте еще два выстрела и повторите по мере необходимости до тех пор, пока сдвиг параллакса не исчезнет. Дальнейшее уточнение: Близкое расстояние ленты означает, что она может выглядеть несколько не в фокусе некоторые линзы, что затрудняет точное суждение, особенно если вам также придется столкнуться с сильным искажением краев «рыбьего глаза» линза. Эту проблему можно решить быстрым сшиванием два изображения в PTGui, поставив контрольные точки только на задний план.Для вывода выберите только небольшую центральную область, которая показывает ленту. и сгенерируйте многослойный PSD-файл. Снова просмотрите файл в фотошопе, включение и выключение верхнего слоя, чтобы выявить любое параллаксное движение. Это то, что я получил на своей первой строчке при калибровке 70 мм. линза после первоначальной приблизительной оценки положения входного зрачка на глаз (просто посмотрев в объектив): | |||
The
лента имеет ширину 25 мм, поэтому сдвиг довольно небольшой.Понимать
что размер этого видимого сдвига ленты практически равен
то же, что и движение входного зрачка вбок, и не зависит
расстояния от ленты до камеры. Настройка камеры уже
вероятно, достаточно хорош для многих целей. Обратите внимание, что это очень просто
чтобы оценить сдвиг, несмотря на то, что лента была несколько нечеткой, камера
сосредотачиваясь на заднем плане. Но давайте теперь исправим
положение камеры для получения наилучшего результата. | |||
Как и раньше, из направление движения ленты при вращении камеры по часовой стрелке, I решил, в какую сторону мне нужно сдвинуть камеру, чтобы сдвинуть вход зрачок ближе к оси вращения. Я подтолкнул камеру на несколько мм и повторил тест, используя файл проекта PTGui из предыдущего тест в качестве шаблона и присвоение 4 или 5 контрольных точек. Через четыре Всего попыток, занявших три четверти часа, я закончил этот результат: | |||
Это
выглядит почти идеально, без заметного сдвига параллакса. | |||
Некоторые
сочтут процесс сшивания излишним, но только тесты
нужно выполнить один раз для данного объектива, и это удовлетворительно
и обнадеживает то, что параллакс более или менее устранен
полностью. Но как уже было сказано, можно обойтись без
вышивку и просто сравните изображения в фотошопе, или даже
проверьте движение параллакса, просто посмотрев в видоискатель.Если у вашей камеры есть LiveView, увеличьте масштаб для увеличения.
Это
до вас, чтобы быть настолько точным, насколько вы хотите. Основной метод
остается такой же. | |||
5 ГОЛОВКИ ДЛЯ УСТАНОВКИ КОЛЬЦЕВ Большинство кольцевых креплений не регулируется, настраивается под конкретный объектив. В Головки Nodal Ninja Ultimate R1 и R10 отличаются размещением разные линзы и с механизмом продольной регулировки, а также наклон в случае R1.Это делает возможным установить точку отсутствия параллакса, сдвинув камеру назад и вперед, точно так же, как это делается путем регулировки положения на верхнем рельс сферической головки типа НН3 / 5. Методы для находка АЭС поэтому практически не отличается. Единственный разница в том, что нет горизонтального и вертикального позиционирования беспокоиться о. Просто выберите требуемый угол наклона и проверьте для параллакса, когда головка поворачивается между положениями фиксации.Двигаться камеру вперед и назад, пока не исчезнет параллакс, или хотя бы минимизирован. NB. Эта позиция будет меняться в зависимости от к выбранному углу наклона. | |||
ПРИМЕЧАНИЕ — ЛИНЗЫ FISHEYEE СООБРАЖЕНИЯ: On предмет точности, вы должны знать, что вход зрачок в объективе «рыбий глаз» не центрирован в одной точке.Его видимое положение меняется для световых лучей, попадающих в линзу при разных углы к оптической оси. См. Страницу Мишеля Тоби, который показывает, как изменяется входной зрачок объектива Sigma 8mm f / 4 на расстоянии около 20 мм для лучей под разными углами. В поэтому входной зрачок сосредоточен на плавающей запятой, которая перемещается над поверхностью, имеющей форму, похожую на расширяющийся конец трубы, по направлению световых лучей.Это для этого причина, по которой вы должны отрегулировать положение без параллакса, чтобы оно соответствовало углы, соответствующие швам на вашей панораме, где параллакс ошибки могут появиться. Камера не поворачивается вокруг входной зрачок, но о точке, которая делает входной зрачок зрачок, кажется, занимает ту же позицию, если смотреть в направлении при котором будут объединены последовательные выстрелы — например, под углом 45 градусов к ось объектива на 4 кадра панорамы. Пока это будет штраф за горизонтальные части сцены, лучи от надира и области зенита будут входить в линзу под углами, приближающимися к 90 градусов к оси линзы, что подразумевает другой вход расположение зрачка и, следовательно, теоретически требует другого точка вращения без параллакса. Выбор точки вращения должен поэтому будет компромисс, но сшиватели обычно могут хорошо справляться достаточно, чтобы избежать серьезных ошибок при сшивании.Проблема во многом избегать при прохождении 4 кругов плюс надир и зенит и присоединение в 45 градусов по вертикали и горизонтали как куб. Посмотреть вариант в положении входного зрачка под разными углами к линзе оси, все, что вам нужно сделать, это сначала осмотреть входной зрачок со стороны перед линзой. Он будет расположен внутри линзы, примерно в положении золотой полосы в случае Объектив Sigma 8 мм.Теперь медленно переместитесь в сторону линзы, удерживая входной ученик в поле зрения. Он будет двигаться вперед, так что он все еще остается хорошо видимым почти до 90 градусов, но, видимо, это больше не в золотой полосе, потому что эта позиция полностью скрыта оправой объектива. Вы можете увидеть яркое пятно входной зрачок прямо перед тубусом объектива на этой фотографии сбоку, почти под углом 90 градусов к оси объектива: ССЫЛКИ PanoTools wiki: База данных начальных учеников Рик Литтлфилд: теория отсутствия параллакса Точка панорамной фотографии Ханс Нюберг: Обнаружение NPP линз «рыбий глаз» Pierre Toscani: линзы Fisheye Ален Гамблен: Сеточный метод для поиска АЭС Мишель Тоби: теория наименьшего параллакса (LPP) | |||
Джон
Houghton — 10/08/13 | |||
Фотография в виртуальной реальности — Техническая записка по выравниванию входного зрачка (узловая точка)
Фотография в виртуальной реальности — Техническая записка по выравниванию входного зрачка (узловая точка)Входной ученик (ранее узловая точка) |
Обновление: январь 2008 г.
В течение многих лет сообщество VR-фотографов ошибочно называло точку отсутствия параллакса объектива, используемого для панорамного сшивания, своей «узловой точкой».«В случае некоторых панорамных камер с поворотной линзой задняя узловая точка действительно является точкой, относительно которой объектив поворачивается или поворачивается. Однако для панорамной фотографии, сделанной большинством VR-фотографов, мы сшиваем серию последовательно панорамированных изображений вместе, подходящим термином для этой точки без параллакса является «входной зрачок». Вы увидите, что это относится к обоим направлениям в различных публикациях и веб-руководствах. Все принципы правильного выравнивания комбинации камеры / объектива для панорамной сшивки по-прежнему применимы, независимо от того, какой термин используется.
Спасибо Ричарду Ф. Лайону, Теду Чаваласу, Джею Кумлеру и Дж. Брайану Колдуэллу за их советы и опыт.
Входной зрачок объектива — это точка поворота объектива, в которой близкие и далекие объекты, сфокусированные на плоскости пленки, сохраняют свое относительное положение относительно друг друга. Для успешной панорамной фотографии необходимо, чтобы ось вращения камеры находилась у входного зрачка объектива. В противном случае объекты на переднем и заднем планах меняют свое относительное положение при панорамировании камеры, вызывая смещения и ошибки стыковки между снимками.
+ | ||
Смещение входного зрачка | Различное пространство между радиоприемником на переднем плане и дверью на заднем плане | |
+ | ||
Выравнивание входного зрачка | Одинаковое пространство между элементами переднего и заднего плана |
Положение этого входного зрачка может быть разным для каждой линзы.Однако у широкоугольных объективов он часто находится между средней точкой объектива и кольцом диафрагмы.
К сожалению, производители объективов не отмечают входные зрачки на корпусах объективов, поэтому фотографам VR необходимо определить это положение перед съемкой. Это достигается путем установки камеры и объектива на регулируемую панорамную головку VR и наблюдения за соотношением объектов переднего и заднего плана через видоискатель во время панорамирования камеры. Таким образом можно довольно точно согласовать ось панорамирования с входным зрачком объектива.Однако учтите, что это работает только в том случае, если у камеры есть зеркальный видоискатель или видоискатель через объектив.
Если ваша камера не является однообъективным зеркалом или видоискатель не показывает в точности то, что видит объектив (как в случае с дальномером, двойным зеркальным отражением, наведением и съемкой и большинством потребительских цифровых фотоаппаратов), то ваше выравнивание входного зрачка вероятно, придется делать методом проб и ошибок. Многие цифровые камеры имеют разъем для видеовыхода или могут отображать видеоизображение в реальном времени на ЖК-экране.Поскольку изображение создается датчиком изображения внутри камеры, его можно довольно эффективно использовать для выравнивания входного зрачка.
Это выравнивание важно для получения наилучших качественных результатов. Однако чем дальше от объектива находятся ваши объекты, тем менее критичным становится. Пока ближайший объект находится на расстоянии 3–4 футов (или более) от камеры, смещения входного зрачка почти не вызывают проблем сшивания, если они вообще возникают, особенно при использовании очень широкоугольных объективов. Всегда следует избегать небрежной техники съемки, но знание степени прощения может оказаться огромным подспорьем, когда вы обнаружите, что вообще не можете использовать штатив или наклонную головку.Расхождения входного зрачка тем значительнее, чем ближе объекты переднего плана к камере.
Существует эмпирическое правило, согласно которому время, забота и расходы, которые вы не потратите на правильную технику во время съемки, будут в 10 раз умножены на корректировку при постобработке. В то время как современные технологии обработки цифровых изображений позволяют исправить практически все постфактум, обычно гораздо лучше сделать что-то сразу, чем пытаться «исправить это сразу».«
Процесс согласования вступительных учеников
Чтобы найти входной зрачок объектива, сначала установите камеру и объектив на регулируемую панорамную головку VR. Камера должна быть установлена в портретной (вертикальной) ориентации с центром линзы, расположенным непосредственно над осью панорамирования VR-головы.
против | ||
Входной ученик пропущен | Входной зрачок выровнен | |
Сшитый результат — обратите внимание на побочные изображения | Сшитый результат выглядит бесшовным |
Шаг 1: Убедитесь, что панорамная головка VR находится на уровне верхней части штатива.Большинство головок виртуальной реальности имеют круглый пузырьковый уровень, который вы можете использовать. Убедитесь, что голова остается ровной, наблюдая за уровнем (-ами) пузырьков, когда вы поворачиваете камеру и голову на 90 ° или более.
Дважды убедитесь, что камера установлена прямо на головке VR и не наклонена вверх или вниз и не изогнута по отношению к голове. Вы можете сделать это, посмотрев в видоискатель после того, как голова будет выровнена. Убедитесь, что вертикальные линии сцены в видоискателе расположены вертикально, а горизонт виден в середине кадра.
Пузырьковый уровень с горячим башмаком — хорошее дополнение к уровням, встроенным в коммерческие головки виртуальной реальности, такие как Manfrotto 303SPH, показанный здесь. |
Вы можете проверить выравнивание с помощью пузырькового уровня, прикрепленного к горячему башмаку камеры. Эти пузырьковые уровни доступны во многих магазинах фототоваров. Однако имейте в виду, что горячий башмак вашей камеры может не быть идеально выровнен с заслонкой пленки внутри камеры, особенно если видоискатель сильно ударился или вообще помят.В идеале вам нужно, чтобы пузырьковые уровни на камере и панорамная головка VR оставались центрированными при панорамировании.
Шаг 2: Затем выровняйте оптический центр линзы прямо над осью вращения поворотной головки. Обычно это делается, глядя на переднюю часть камеры и регулируя камеру на головке панорамирования так, чтобы центр объектива находился прямо над центром механизма панорамирования.
Центрирование линзы над осью вращения | Выровнять входной зрачок по оси вращения |
Шаг 3: Когда вы отцентрируете линзу над осью вращения поворотной головки, вы можете найти входной зрачок, перемещая камеру вперед или назад на головке VR.Этот процесс носит визуальный характер и потребует от вас иметь какой-то вертикальный край на переднем плане, который вы можете выровнять с другим вертикальным краем на заднем плане. Отрегулируйте камеру вперед или назад, глядя в видоискатель, поворачивая камеру вперед и назад, пытаясь найти положение над осью вращения поворотной головки, при котором объекты переднего и заднего плана будут согласованно выровнены.
Оптимально, если объект на переднем плане находится на расстоянии менее 30 см от передней части объектива, а объект на заднем плане находится в фокусе на бесконечность или близка к ней.Хорошие вертикальные линии фона включают края зданий, окон, дверных косяков и т. Д. (При условии, что конструкция отвесная). Объекты переднего плана должны легко перемещаться и как можно ближе к вертикали. Примеры могут включать край книги в твердом переплете, стоящей вертикально на столе, световую подставку или край коробки.
Если объект переднего плана движется в том же направлении, что и вы панорамируете относительно фонового объекта (т. Е. Объект переднего плана перемещается влево при панорамировании влево), то объектив установлен слишком далеко за входным зрачком и камерой. нужно отрегулировать вперед.Если при панорамировании объект переднего плана движется в противоположном направлении относительно фона (т. Е. Объект переднего плана перемещается вправо при панорамировании влево), то объектив установлен слишком далеко перед входным зрачком и его необходимо отрегулировать. назад на головку сковороды.
После того, как входной зрачок объектива правильно расположен над центром вращения панорамирующей головки, объекты переднего и заднего плана останутся неподвижными относительно друг друга в видоискателе при панорамировании камеры.
Шаг 4: Зафиксируйте это положение на головке штатива, затянув все регулировочные ручки или винты. Затем обязательно отметьте это положение, чтобы вы могли быстро вернуться в него при повторном использовании этой комбинации камеры и объектива.
Поиск входного зрачка для других комбинаций фотоаппаратов или объективов практически идентичен. Однако этот процесс может быть более сложным с бытовыми или не-SLR цифровыми камерами, потому что вы не видите фактическое изображение, сфокусированное объективом, когда вы смотрите в видоискатель.В большинстве этих камер видоискатель содержит собственную миниатюрную оптику, которая примерно соответствует тому, что фиксирует объектив камеры. Поэтому эти видоискатели нельзя использовать для выравнивания входного зрачка.
| Используйте ЖК-монитор для выравнивания входного зрачка в цифровых камерах, таких как эта модель Nikon Coolpix. |
Многие из этих цифровых камер позволяют использовать их ЖК-экраны в качестве «живого» видеомонитора, демонстрируя изображение, которое снимается через объектив камеры датчиком изображения внутри камеры.Вы можете использовать эту способность «монитора» для выравнивания входного зрачка, панорамирования вперед и назад, наблюдая за соотношением между объектами переднего и заднего плана, как если бы вы смотрели в видоискатель зеркальной камеры.
Для цифровых фотоаппаратов, которые не имеют возможности монитора, вам придется снимать серию изображений переднего и заднего плана методом проб и ошибок и, возможно, даже загружать их на свой компьютер, чтобы определить правильное выравнивание изображения. входной ученик.Kaidan, популярный производитель оборудования для VR-фотографии, производит ряд формованных или предварительно настроенных панорамных головок для конкретных цифровых фотоаппаратов. Если у них есть один доступный для вашей конкретной камеры, выравнивание входного зрачка уже будет включено в дизайн головы, и вы можете просто установить камеру и снимать, даже не задумываясь о таких настройках.
| Головки виртуальной реальности для конкретных камер, такие как эта от Kaidan, доступны для широкого спектра потребительских цифровых камер.Эти головки предварительно настроены на входной зрачок конкретной камеры / объектива. |
После того, как вы выровняли входной зрачок, вам следует тщательно отметить положение на головке VR, чтобы вы могли быстро возвращаться к правильному выравниванию каждый раз, когда вы снимаете с помощью этой комбинации камеры и объектива. Таким образом вам нужно будет выровнять каждую камеру и объектив, которые вы используете для панорамной фотографии. Входной зрачок может быть разным для каждого объектива, даже для объектива с одинаковым фокусным расстоянием от одного производителя.У меня есть два сверхшироких 18-миллиметровых Nikkor, один с автофокусом f / 2,8, а другой более старый объектив с ручной фокусировкой f / 3,5. Оба они имеют разные положения заднего входного зрачка и, следовательно, требуют разного выравнивания даже при использовании одной и той же камеры.
Вместо того, чтобы выравнивать входной зрачок каждый раз при съемке, многие фотографы VR просто используют одну комбинацию камеры и объектива с предварительно настроенной головкой VR.
Некоторые фотографы даже выделяют отдельные головы, каждую для определенной комбинации камеры / объектива, которую они регулярно используют.У этого метода есть определенный недостаток в весе и объеме, поскольку для каждой комбинации камеры или объектива, которую вы можете использовать, приходится носить разные поворотные головки, но те, кто это делает, обычно упаковывают их в отдельные комплекты. Например, один комплект может включать предварительно выровненную головку с камерой и сверхшироким 14-миллиметровым объективом для съемки интерьеров, а другой может включать 24-миллиметровый объектив, более подходящий для наружных и пейзажных панорам.
Лучший подход, который я нашел, — это использовать одну камеру и объектив в качестве основного набора для панорамной виртуальной реальности.Я снимаю 95 процентов своей работы на тот же корпус камеры Nikon, объектив 18 мм и предварительно настроенную панорамную головку. Слишком много оборудования может быть почти такой же проблемой, как и слишком мало. В случае сомнений старайтесь выбирать оборудование как можно проще.
Поиск узловой точки линзы — страницы Хью
Узловая точка линзы (или, точнее, входной зрачок) может рассматриваться как точка, в которой сходятся лучи, входящие в линзу. Его также можно рассматривать как центр перспективы линзы или видимый зрачок.Эту точку можно рассматривать как точку без параллакса ( NPP ) или переднюю узловую точку , поскольку линза также имеет заднюю узловую точку, а в простой линзе два узла сходятся в одну точку.
Термин узловая точка используется здесь, потому что на протяжении десятилетий он был принят как термин, определяющий точку, где лучи, входящие в линзу, очевидно сходятся, и упоминается в этой номенклатуре в значительном количестве фотограмметрических статей и публикаций, но позвольте нам не позволяйте терминологии отвлекать внимание от сообщения.Что нас интересует, так это направления (или векторы) лучей, попадающих в линзу.
Важно знать расположение этой точки (входного зрачка) для фотограмметрических целей. Чтобы обеспечить правильное начало и ориентацию в пространстве лучей, используемых для вычисления пересечения при использовании техники фотографического пересечения, важно, чтобы эта точка была определена как можно точнее. Также важно, чтобы этот момент был известен для приложений, таких как использование фотографического изображения в сочетании с данными HDS (High Definition Surveying), и для любого приложения, в котором равнопрямоугольное изображение должно быть получено с использованием программного обеспечения, такого как PTGui .
Левое изображение повернуто вокруг «Втулки штатива», а правое изображение повернуто вокруг АЭС
.Эта точка является идеальной точкой для поворота объектива для устранения параллакса при съемке изображений для «сшивания» вместе для получения панорамных изображений, особенно панорам 360 °. Если вы создаете панораму объектов, очень близких к камере, тогда необходимо уделить серьезное внимание этому моменту, чтобы устранить параллакс, как показано на изображении справа, но если ваши панорамы имеют особенности в десятках или сотнях метров от камеры , например, пейзажная панорама, то вам не нужно будет слишком много думать об этом.
Объективы фотограмметрических фотоаппаратов «симметричны». Установка Wild P32, показанная на изображении, на теодолите была устроена так, чтобы передняя узловая точка объектива совпадала с вертикальной осью теодолита, когда телескоп был действительно горизонтальным, хотя это означало, что камера не была хорошо сбалансирован. В обычных фотографических объективах, таких как те, которые мы выбрали бы для фотографического пересечения, эта точка часто не является единственной точкой, а «скользит» по главному лучу линзы в зависимости от угла между рассматриваемым лучом и главным лучом.Для целей фотографического пересечения положение этих точек должно быть определено для самого широкого угла обзора объектива, хотя есть возможность ввести различные местоположения в качестве другого параметра в процессе вычислений.
Определение местоположения узловой точки (входной зрачок, точка без параллакса (NPP))
Узловая точка или входной зрачок могут быть измерены как часть процесса калибровки камеры и объектива с использованием калибровочного стенда, сконструированного для определения параметров камеры и объектива в фотограмметрических целях.Таких установок немного, и даже если вы ее найдете, стоимость калибровки, вероятно, будет больше, чем стоимость калибруемого вами оборудования, что лишает вас возможности использовать фотографическое пересечение как дешевый метод точного измерения. измерение 3D точек. Поэтому желательно найти способ определения Узловой точки самостоятельно с помощью простых в получении и недорогих предметов.
Штифты и рулетка…
В конце 1970-х, начале 1980-х годов я использовал метод, аналогичный описанному Мишелем Тоби с гвоздями и банкнотами , за исключением того, что я использовал иглы и лицевую часть рейки «E» или рулетку. .
Важно, чтобы объекты переднего плана не закрывали слишком большую часть фона и чтобы фон имел достаточно деталей, чтобы точно идентифицировать ту часть, которая затемняется на изображении объектами переднего плана.
Техника состоит в том, чтобы создать изображение сцены, а затем использовать детали фонового объекта, скрытые объектами переднего плана, чтобы восстановить лучи, которые сходятся в узловой точке, и таким образом определить ее. Совершенно необходимо, чтобы ничто в расположении не нарушалось, пока не будет сделана соответствующая печать сцены, чтобы можно было точно нарисовать лучи.В эпоху цифровых технологий это не такая уж большая проблема, но когда используется пленка, сохранение сцены в неприкосновенности может стать проблемой. Недостатком этого метода является то, что при использовании гвоздей или игл с фоном, находящимся достаточно близко к линзе, линза фокусируется близко, чтобы детали оставались резкими на изображении, но линза с большей вероятностью будет сфокусирована на бесконечности или около нее фактически используется для измерения. Узловая точка может меняться при фокусировке в некоторых объективах. Это можно преодолеть, выйдя на улицу и используя трости, стержни для измерения дальности или дюбеля в качестве объектов переднего плана, например, фасад здания в качестве фонового изображения, а также камеру и объектив на «столе-плоскости».Сохранение порядка при обработке пленки и печати изображения приличного размера было еще более сложной задачей! Обратите внимание, что камера была повернута вокруг своего главного луча так, чтобы диагональ поля зрения использовалась для получения максимального угла обзора, метод, который можно использовать с обоими другими методами.
Поэкспериментировав со всеми описанными здесь методами, это определенно самый точный, за которым следует метод с использованием лазерной указки. Поскольку сейчас мы живем в «цифровую эпоху», этот метод доставляет меньше проблем, чем в эпоху пленки, поскольку положение камеры, «булавки» и «мишень» (например,грамм. рулетка) можно точно измерить и импортировать в приложение САПР, где затем можно «нарисовать» «лучи» и определить их пересечение с главным лучом.
Этот метод также подходит для камер с крошечным экраном или без экрана, таких как камеры с двумя и несколькими объективами.
Простой метод…
Более простой метод определения узловой точки — это поместить объект (тонкий столб или проволоку) рядом с линзой и совместить его с более удаленным объектом.Если камера поворачивается вокруг передней узловой точки, два объекта будут выровнены, когда они находятся в центре изображения, а также когда они находятся с каждой стороны изображения. Если объекты выровнены в центре изображения, но кажутся разделенными при повороте камеры, тогда поворот вокруг Узловой точки будет на , а не на . Этот метод может быть проще, чем первый описанный метод, но он более сложен и менее точен.
Для определения передней узловой точки зум-объектива Nikon 18-70 мм, установленного на 18 мм, 10-миллиметровый дюбель был установлен примерно в 7 м перед камерой так, чтобы он совпадал с вершиной крыши жилого дома. 200 м.Камера вращалась вокруг точки крепления штатива в основании, которая находится за узловой точкой, и точки на таком же расстоянии перед узловой точкой, чтобы проиллюстрировать очевидное перемещение дюбеля относительно вершины крыши, если камера не установлена. повернулся вокруг передней узловой точки.
Использование лазерной указки…
Самый новаторский и вдохновляющий метод, с которым я столкнулся в последнее время, — это метод, который использовал Michel Thoby с лазерной указкой .Как утверждает Мишель, для этого метода вам понадобится только линза. Однако установка объектива на пленочную камеру с открытым затвором на колбе и открытой задней частью означает, что вы можете откалибровать любой объектив, поскольку ось объектива всегда будет на одной высоте над поверхностью. Это означает, что легче построить лазерную алидаду с фиксированной высотой лазера над поверхностью. Когда лазерный луч проходит по пути луча, который встречается с узловой точкой, на поверхности (белая карточка), расположенной за линзой, видно очень яркое пятно, и луч можно нарисовать на бумаге.Эти лучи могут быть построены для различных углов падения и определения узловой точки.
Этот метод исключительно точен, и точные результаты можно получить быстро и легко. Положение линзы, особенно передняя часть, которая будет использоваться в качестве ориентира, можно ортогонально спроецировать на бумагу с помощью простого установленного квадрата.
Нахождение узловой точки без панорамной головки…
Настройка лазера требует времени и усилий, но другой метод, предложенный недавно Мишелем Тоби , обеспечивает более простое решение.
Камера и объектив помещаются на лист бумаги, как и при использовании лазерной указки, но вместо нее используется «цель», которая по сути представляет собой линейку с двумя тонкими вертикальными визирными лопастями.
Это устройство помещается перед объективом и поворачивается до тех пор, пока две лопасти не выровняются, если смотреть в видоискатель или на «прямой экран» камеры, и линия, проведенная на бумаге вдоль прямой кромки, соединяющей две вертикальные лопасти.
Это повторяется для разных «углов», составляя диаграмму диаграммы направленности лучей, попадающих в линзу, и узловая точка (NPP) определяется тем, где линии пересекаются с «главным лучом» линзы.
Положение линзы, особенно передняя часть, которая будет использоваться в качестве ориентира, может быть ортографически спроецировано на бумагу с помощью простого установленного квадрата.
Мне этот метод показался довольно сложным при наведении на «цель» с помощью видоискателя или «живого экрана», особенно при нахождении NPP для линз Fisheye для панорам 360 °. Кроме того, этот метод не подходит для поиска NPP двойных или многообъективных камер с крошечным экраном или без него, поэтому я решил модифицировать этот метод с помощью принципа «простого метода».
Простой способ — модифицированный…
Простой метод определения узловой точки (NPP) линз «рыбий глаз», в том числе на двойных или многообъективных камерах с крошечными экранами или без них, заключается в нанесении лучей на бумагу, исходящих из опорной точки. Затем камеру устанавливают так, чтобы передняя часть объектива совпадала с этой контрольной точкой. Затем снимаются изображения, перемещая камеру вперед на два миллиметра за раз, гарантируя, что камера перемещается достаточно, чтобы гарантировать, что АЭС будет покрыта.Затем изображения можно удобно просматривать на компьютере, а NPP для конкретного угла падения можно определить по расстоянию перед линзой, где линия, проведенная на бумаге, является вертикальной на изображении. Обычно АЭС не является одной точкой, как показано в следующих примерах, поэтому для панорам 360 ° я выбираю АЭС для угла соединения для сшивания изображений (например, 45 ° от главного луча для 4 выстрелов по кругу и 30 ° от главного луча на 6 выстрелов). В этом случае необходимо только нанести на бумагу необходимые лучи.На изображении слева показаны снимки экрана в 250% от положения для объектива Pergear 7,5 мм Fisheye для луча 45 ° с интервалом 2 мм перед контрольной точкой на передней части объектива с наложенными вертикальными красными линиями, легко найти АЭС, скажем, под углом 45 ° (4 кадра по кругу) для этого объектива.
Результаты определения местоположения узловой точки (точки без параллакса) для набора линз.
Положение узловой точки и ее поведение явно зависят от конструкции и конструкции линзы.
Иллюстрации, показанные здесь, были определены с использованием методов «лазерной указки» и / или «булавки и рулетки».
Объектив Sigma 10–20 мм f4-5.6 EX DC HSM Объектив зум-объектив фактически имеет переднюю узловую точку в одной точке, и это положение остается неизменным независимо от расстояния, на которое фокусируется объектив. Это одна и та же точка, независимо от того, фокусируется ли объектив на бесконечности или на близком расстоянии. | |
| Передняя узловая точка на объективе Sigma 10–20 мм f4-5.6 EX DC HSM Объектив с переменным фокусным расстоянием перемещается от передней части объектива при увеличении фокусного расстояния при увеличении фокусного расстояния и находится примерно на 19 мм от передней части объектива, когда установите фокусное расстояние 20 мм. При настройке 20 мм узловая точка совпадает с золотым кольцом и остается в том же месте, в котором фокусируется линза. | |
| Объектив Nikon 28 мм f2.8 D Объектив AF демонстрирует, как передняя узловая точка «скользит» по основному лучу (оси линзы) в некоторых конструкциях линз. По мере увеличения угла обзора узловая точка перемещается назад, от передней части объектива. Здесь линза сфокусирована на бесконечность, а узловая точка находится примерно в 20 мм от передней части линзы и показывает разброс около 4 мм с используемыми углами обзора. | |
| Объектив Nikon 18–200 мм f3.5-5.6 G AF-S V R Объектив, установленный на 18 мм , демонстрирует стабильность, аналогичную Sigma 10–20 мм, с небольшим изменением между фокусировкой на бесконечности и близко сфокусированный. Для использования с панорамной головкой для панорам 360 ° узловую точку можно рассматривать как расстояние 32 мм от переднего края объектива. | |
| Nikon 10.5m m f2.8 G ED Fisheye показывает эффект, обратный эффекту объектива Nikon 28mm: передняя узловая точка «скользит» по главному лучу, но приближается к передней части объектива по мере увеличения угла зрения увеличивается. Узловая точка для этого объектива также меняется в зависимости от фокусировки и имеет меньший разброс при близкой фокусировке, чем при фокусировке на бесконечность. Это объектив DX с фиксированной блендой, которую необходимо снимать (сбрить) для использования с корпусом FX. | |
| Объектив Sigma 8mm f3.5 EX DG Fisheye имеет те же характеристики, что и объектив Nikon 10,5mm Fisheye, в том, что передняя узловая точка «скользит» по главному лучу и приближается к передней части объектива в зависимости от угла зрения. увеличивается. Узловая точка для этого объектива также меняется в зависимости от фокусировки и имеет меньший разброс при близкой фокусировке, чем при фокусировке на бесконечность. | |
| Объектив Sigma 4.5mm f2.8 EX DC Fisheye демонстрирует те же характеристики, что и объектив Sigma 8mm Fisheye, в том, что передняя узловая точка «скользит» по главному лучу и приближается к передней части объектива в зависимости от угла обзора. увеличивается. | |
| Объектив Samyang 8mm f3.5 FISH-EYE CD демонстрирует тот же рисунок, что и другие объективы «рыбий глаз», но с гораздо более узким диапазоном для входного зрачка, что связано с другой конструкцией, описанной в LensTip.com и Michel Thoby . Такой дизайн предполагает, что этот объектив больше подходит для сферических (360 °) панорам, чем «обычные» линзы типа «рыбий глаз», и его значительно более низкая стоимость делает его привлекательным вариантом. | |
| Tamron PZD 16 — 300 мм f3,5-6,3 , подходящий для использования с датчиком DX [APS-C], показывает движение NPP (точки без параллакса), противоположное линзам Fisheye, аналогично Nikon 28 мм f2.8 D AF при установке на 16 мм и фокусировке на бесконечность. | |
| Tamron PZD 16 до 300 мм f3.5-6.3 , подходящий для использования с датчиком FX, показывает движение NPP (точки без параллакса), противоположное линзам «рыбий глаз», аналогично Nikon 28 мм f2. 8 D AF при установке на 28 мм и фокусировке на бесконечность. | |
| Объектив Sigma 12-24mm f / 4.5-5.6 DG II HSM для использования с датчиком FX демонстрирует те же характеристики, что и Sigma 10 до 20mm f4-5.6 HSM для использования с датчиком DX с NPP (без точки параллакса) на расстоянии 1,6 мм от задней части фиксированной бленды объектива, при установке на 12 мм и фокусировке на бесконечность. | |
| Рисунок NPP для Pergear 7,5 мм Fisheye отличается от большинства объективов типа «рыбий глаз». Это объектив DX с фиксированной металлической блендой, которую необходимо снимать (сбрить) для использования с корпусом FX. Это полностью ручной объектив, поэтому у него нет данных exif, поэтому корпус FX не распознает его как объектив DX и автоматически переключается в режим DX, поэтому использует формат изображения FX.NPP для лучей под углом 45 ° к главному лучу (4 выстрела по кругу) составляет 18 мм назад от передней части линзы. | |
| Камера Samsung Gear 360 предназначена для «соединения» двух полусферических изображений с помощью ActionDirector, но эксперименты с использованием камеры для измерения показали, что получение четырех снимков вокруг и сшивание четырех снимков для передней линзы в PTGui дает более точную равнопрямоугольную форму, чем «соединение» двух полушарий в ActionDirector.Равнопрямоугольник, созданный сшиванием четырех изображений в PTGui, также примерно на 30% больше, чем полученный в ActionDirector. | |
| При определении NPP для двух предыдущих объективов мне было бы интересно посмотреть, как Insta360 ONE X2 вела себя, учитывая другую геометрию, поскольку датчик не перпендикулярен главному лучу, входящему в объектив. Чтобы сшить четыре кадра по кругу в PTGui , вращая камеру вокруг своей вертикальной оси (втулка штатива), можно получить хороший результат с равнопрямоугольником примерно того же размера, что и при использовании Insta360 Studio для «соединения» полусфер. |
Точка без параллакса — PanoTools.org Wiki
Если вы повернете камеру вокруг какой-то случайно выбранной точки, ваши изображения могут показывать параллакс, и их будет сложно сшить.
У большинства объективов есть одна особая точка, вокруг которой вы можете вращать камеру и не получать параллакс. Эта специальная «точка без параллакса » является центром входного зрачка объектива , виртуальной апертуры объектива. В сообществе панорамных фотографов эту особую точку часто называют «узловой точкой », но на самом деле она не связана с фактическими узловыми точками объектива. 1,2 Фактические узловые точки — это другие точки на оптическом пути, которые не имеют значения для большинства фотографов. Точка без параллакса также является «центром перспективы», но этот термин обычно не используется и не описывает, почему точка без параллакса важна.
Входной зрачок — это изображение ограничивающей диафрагмы или диафрагмы, видимое через переднюю часть объектива. Видимое изображение может быть увеличено за счет эффекта линз перед ним, и изображение смещается от фактического положения диафрагмы.Камера должна вращаться вокруг центра изображения, чтобы избежать параллакса.
Учитывая все обстоятельства, лучшим термином для точки без параллакса может быть (сюрприз!) «Точка без параллакса». «Начальный ученик» — правильно, хотя и немного неточно для геометрического пуриста; это хороший термин для поиска в литературе, и его предпочтительнее использовать в формальном письме. «Узловая точка» обычно используется, но неверна и приводит к путанице. Этого следует избегать при написании и интерпретировать с осторожностью при чтении литературы.
Независимо от того, что вы называете точкой отсутствия параллакса, ее легко найти методом проб и ошибок. Просто отрегулируйте точку поворота так, чтобы точки переднего и заднего плана оставались на одной линии.
Некоторые линзы, особенно рыбий глаз, не имеют единой точки без параллакса. Вместо этого у них есть диапазон того, что мы можем назвать «точками наименьшего параллакса», которые зависят от угла от оси линзы. Такие линзы легко распознать — просто посмотрите в переднюю часть линзы и обратите внимание, что входной зрачок перемещается вперед или назад, когда вы поворачиваете линзу вне оси.С такими объективами хорошо выбрать один угол, под которым вы хотите сшить, и повернуть камеру вокруг точки, которая не дает параллакса под этим углом.
Чтобы упростить поиск точки отсутствия параллакса для других людей, внесите измерения, которые вы нашли для вашей комбинации камера / объектив / фокусное расстояние, в Базу данных входных учеников.
См. Также
Список литературы
- Керр, Дуглас А. «Правильная точка поворота для панорамной фотографии» Тыква (2005).Проверено 2 февраля 2011 г.
- ван Валри, Пол «Заблуждения в фотографической оптике», № 6. Проверено 2 февраля 2011 г.
Ссылки
Теоретически
Расположение АЭС определенной линзы
Узловая точка — обзор
Базовая аппроксимация анализа методом конечных элементов
Если свободная конструкция имеет моды твердого тела по отношению к произвольной контрольной точке, отличной от ее центра тяжести (ЦТ), все приложенные нагрузки и создаваемые силы инерции приложенные нагрузки должны быть уравновешены в этой точке для равновесия сил и моментов.Эта концепция демонстрируется в этом разделе.
Предполагается, что произвольная узловая точка i (x i , y i , z i ) неограниченной конструкции может быть описана в декартовой системе координат и что начало декартовых осей является точкой отсчета. точка. Матрица преобразования геометрического твердого тела ([Ri, 0] 6 × 6), которая связывает движения твердого тела ({ur, 0} 6 × 1) из опорной точки (0, 0, 0) с этими движениями в узловой точке i. ({ur, i} 6 × 1) можно определить следующим образом:
(2.7) {ur, i} 6 × 1 = [Ri, 0] 6 × 6 {ur, 0} 6 × 1
, где
{ur, i} = {vx, ivy, ivz, iθx, iθy, iθz , i} {ur, 0} = {vx, 0vy, 0vz, 0θx, 0θy, 0θz, 0} [Ri, 0] = [1000zi − yi010 − zi0xi001yi − xi0000100000010000001]
, где
v и θ = узловое смещение и вращение
x, y и z (индексы) = декартовы оси
Если вводится контрольная точка, отличная от начала координат, матрица преобразования геометрического твердого тела будет соответствующим образом изменена.Выбор точки отсчета является произвольным и не влияет на результаты снятия инерции.
При применении геометрической матрицы преобразования твердого тела применяются следующие уравнения перемещения и силы от узла к началу координат:
(2.8) {u¨r, i} 6 × 1 = [Ri, 0] 6 × 6 {u¨r, 0} 6 × 1
(2.9) [Ri, 0] 6 × 6T {Pi} 6 × 1 = {P0} 6 × 1
, где
{u¨r, 0} 6 × 1 = вектор ускорения твердого тела в начале координат
{u¨r, i} 6 × 1 = вектор ускорения твердого тела в узловой точке i
{P 0 } 6 × 1 = вектор равнодействующей силы в начале координат
{P i } 6 × 1 = вектор приложенной нагрузки в узловой точке i
Эти ускорения и силы отмечены следующим образом:
{u¨r, 0} = {v¨x, 0v¨y, 0v¨z, 0θ¨x, 0θ¨y, 0θ¨z, 0} {u¨r, i} = {v¨x, iv¨ y, iv¨z, iθ¨x, iθ¨y, iθ¨z, i} {P0} 6 × 1 = {Px, 0Py, 0Pz, 0Mx, 0My, 0Mz, 0}
, где
v ¨ и θ¨ = узловые поступательное и вращательное ускорения
9 0864
P и M = приложенная сила и момент в узле
Рассмотрим конструкцию, смоделированную с помощью модели конечных элементов с общим количеством n узловых точек, к которым применяется внешняя нагрузка.Полные равнодействующие силы и ускорения в начале координат могут быть получены с помощью следующих уравнений:
(2.10) {u¨r} 6n × 1 = [Ri, 0] 6n × 6 {u¨r, 0} 6 × 1
(2.11) [R] 6 × 6nT {P} 6n × 1 = {P0} 6 × 1
, где
[R] 6n × 6 = [[R1,0] [R2,0] … [Rn, 0]] [u¨r] = [[u¨1,0] [u¨2,0] … [u¨n, 0]] {P} 6n × 1 = {{P1} { P2} … {Pn}}.
Точно так же силы инерции во всех узлах могут быть преобразованы в силы инерции в начале координат, если взять моменты относительно этой контрольной точки:
(2.12) [R] 6 × 6nT [M] 6n × 6n {u¨r} 6n × 1 = [R] 6 × 6nT [M] 6n × 6n [R] 6n × 6 {u¨r, 0} 6 × 1
, где
[M] = [[M1] 000000 [M2] 0000 ….. 0 ….. 0 ….. 000000 [Mn]].
Механические нагрузки жесткого тела уравновешиваются в начале координат, то есть в той контрольной точке, в которой общие результирующие силы инерции равны общим результирующим нагрузкам. Это может быть выражено как
(2.13) [R] 6 × 6nT [M] 6n × 6n [R] 6n × 6 {u¨r, 0} 6 × 1 = [R] 6 × 6nT {P} 6n × 1.
Ускорения твердого тела в начале координат могут быть решены:
(2.14) {u¨r, 0} 6 × 1 = ([R] 6 × 6nT [M] 6n × 6n [R] 6n × 6) -1 [R] 6 × 6nT {P} 6n × 1.
Применяя уравновешенные нагрузки к конструкции из конечных элементов в линейной статической постановке, относительные узловые гибкие смещения относительно начала координат ({u} 6n × 1) могут быть решены с помощью следующего уравнения:
(2.15) [ M] 6n × 6n [R] 6n × 6 {u¨r, 0} 6 × 1 + [K] 6n × 6n {u} 6n × 1 = {P} 6n × 1.
Поскольку матрица жесткости является сингулярной для неограниченной конструкции, для определения относительных узловых смещений требуется специальный метод.Метод, используемый в MSC-NASTRAN ® (MSC Software Corporation; NASTRAN ® , Национальное управление по аэронавтике и исследованию космического пространства), основан на том факте, что матрица относительных узловых смещений ортогональна или не связана с формами колебаний твердого тела собственного решения ( {φ} 6n × 1). Для режимов твердого тела с низкой деформацией вектор преобразования геометрического твердого тела ([R] 6n × 6) может быть выражен как линейная комбинация {φ} 6n × 1.
Следовательно, ограничение разъединения твердого тела удовлетворяется следующим критерием:
(2.16) [φ] T [M] {u} = 0 → [R] T [M] {u} = 0.
Добавление уравнений (2.12), (2.14) и (2.15) к уравнению (2.16) дает
(2.17) [[K] [M] [R] [R] T [M] [R] T [M] ] [R]] ︸ невырожденная матрица {{u} {u¨r, o}} = {{P} [R] T {P}}.
Следовательно, относительные узловые смещения относительно начала координат могут быть решены:
(2.18) {{u} {u¨r, o}} = [[K] [M] [R] [R] T [ M] [R] T [M] [R]] — 1 {{P} [R] T {P}}.
Пример 2.2Такая же балка по размерам, как в примере 2.1, подвергается осевой силе 2224 Н в направлении z, действующей на одном конце, но не имеет каких-либо ограничений, как показано на рисунке 2.2 (а). Балка изготовлена из стали с массовой плотностью 7,8e −9 Мг / мм 3 и модулем Юнга 210 000 МПа. Проведите анализ напряжений в этой незакрепленной балке, используя метод снятия инерции.
Рисунок 2.2. Свободная балка проанализирована с использованием метода начального разгрузки: (а) конечно-элементная модель несвязанной балки и (б) график изолинии напряжений σ xx .
Решение
Модель балки из конечных элементов построена с использованием восьмиузловых шестигранных твердотельных элементов.Он анализируется с помощью решения «Статический» анализ напряжений с опцией «Разгрузка по инерции» в ABAQUS. Анализируемый график контура напряжения в направлении x xx показан на рисунке 2.2 (b), где максимальное сжимающее напряжение xx составляет -30,7 МПа в отмеченном месте.
Как найти узловые точки для панорам
Несколько лет назад я записал на YouTube видео о том, как создавать подробные панорамы, которые можно распечатать с шириной 30 и более футов. Это видео на YouTube сейчас набрало почти 70 000 просмотров и много комментариев.А теперь приквел!
В видео я упоминаю термин «узловая точка». Три наиболее часто задаваемых вопроса от зрителей: «Что такое узловая точка, почему она так важна для панорамы и как вы ее определяете?» Я только что выпустил второе видео, в котором даются пошаговые инструкции по определению узловой точки ваших линз, поэтому я подумал, что это хорошее время и место, чтобы объяснить себя.
Панос или Панос?
Для большинства людей два моих видео излишни, яркий пример излишества.Большинство современных фотографов могут сделать приличное панорамное изображение на свои смартфоны за один крошечный снимок с рук. Конечно, эти панорамы не могут быть сильно увеличены, но они великолепны для использования в Интернете.
С другой стороны, даже фотографы с зеркальными фотокамерами могут снимать приличную панораму с рук или на штативе, используя Lightroom, PTGUI или одну из нескольких других блестяще разработанных программ для сшивания панорамы. Эти панорамы будут выглядеть чертовски хорошо и могут быть увеличены до некоторой степени, хотя любые недостатки в панораме будут увеличиваться при увеличении.
Мои два видео предназначены для продвинутых любителей и профессионалов, которым нужны точные панорамы, которые они могут захотеть продать. Эти панорамы могут быть 10, 20 и даже 50 футов в ширину. Они будут демонстрироваться в элитных домах, офисных зданиях, больницах, аэропортах или там, где необходимо показать эффектное изображение. В таких случаях клиентам нужны изображения с высокой детализацией, резкость и отсутствие пикселов. Войдите в профессиональную панораму, где важны узловые точки.
Узловые точки
Узловая точка иногда упоминается и часто путается с «входным зрачком» или «точкой без параллакса».Фактически, эти три технически разные термины, но я не собираюсь вдаваться в подробности физической оптики. Проще говоря, просто представьте, что это точка, в которой световые лучи входят в линзу, преломляются и пересекаются друг с другом.
Ключевой вывод для вас, как фотографа, заключается в том, что вам нужно расположить эту точку вашего объектива над центром штатива.
Цель моего видео — показать вам, как определить, где находится это место. Как только вы определите это место для каждого из ваших объективов, вы сможете запечатлеть лучшие панорамы, которые вы когда-либо снимали.Имейте в виду, что если вы снимаете панорамы с помощью зум-объектива, вам нужно будет определить узловую точку / входной зрачок на нескольких разных фокусных расстояниях. Например, с помощью своего объектива 70-200 мм я определил точки на 70, 105, 135 и 200. Я также записываю их на свой iPhone, так что он всегда будет у меня под рукой в полевых условиях.
Итак, имея это в качестве фона, перейдите к моему видео и узнайте, как определить ваши узловые точки / точки входа в зрачки. Если вам нужны резкие панорамы, вы будете рады, что сделали это.
| Линза | Фокусное расстояние | Длина входного зрачка (L2) | Источник |
| Canon 17-40 мм | 17 мм | 71 мм | вики.panotool.org |
| Canon 17-40 мм | 28 мм | 69 мм | wiki.panotool.org |
| Canon 17-40 мм | 40 мм | 72 мм | wiki.panotool.org |
| Canon 17-55 mm f / 2.8 | 17 мм | 75,5 мм | wiki.panotool.org |
| Canon 17-55 mm f / 2.8 | 20 мм | 71 мм | вики.panotool.org |
| Canon 17-55 mm f / 2.8 | 28 мм | 59,5 мм | wiki.panotool.org |
| Canon 17-55 mm f / 2.8 | 35 мм | 52 мм | wiki.panotool.org |
| Canon 18-55 мм | 24 мм | 23 мм | wiki.panotool.org |
| Canon 18-55 мм | 35 мм | 45 мм | вики.panotool.org |
| Canon 18-55 мм | 55 мм | 55 мм | wiki.panotool.org |
| Canon 18-55 мм | 18 мм | 47 мм | wiki.panotool.org |
| Canon 24 mm f / 2.8 | 24 мм | 28,5 мм в фокусе F11 на расстоянии 2 м | wiki.panotool.org |
| Canon 24 мм TSE f / 3.5L II | 24 мм | 86 мм при F11, Focus ∞ на отметке F11 | wiki.panotool.org |
| Canon 35 mm f / 2 | 35 мм | 12,5 мм | wiki.panotool.org |
| Canon 35 mm f / 2 | 35 мм | 23 мм на F11, ∞ на красной точке | wiki.panotool.org |
| Canon 50 мм f / 1.8 II | 50 мм | 23 мм | wiki.panotool.org |
| Canon 50 mm f / 2.5 macro | 50 мм | 21,5 мм при F11, Фокус ∞ на метке красной точки | wiki.panotool.org |
| Canon 50 mm f / 2.5 macro | 50 мм | 30 мм при F11, в фокусе прибл. 0,56 м, 0,5 м слева Метка F16 | wiki.panotool.org |
| Canon EF 15 мм | 15 мм | 45 мм при F11 в фокусе на расстоянии 1 м | вики.panotool.org |
| Canon EF 16-35 мм | 16 мм | 91,5 мм | СТАТЬИ |
| Canon EF 16-35 мм | 35 мм | 86 мм | СТАТЬИ |
| Canon EF 16-35 mm f / 4,0 L IS | 16 мм | 92 мм | Макс Кайзер |
| Canon EF 16-35 mm f / 4,0 L IS | 20 мм | 89 мм | Макс Кайзер |
| Canon EF 16-35 mm f / 4,0 L IS | 24 мм | 87 мм | Макс Кайзер |
| Canon EF 16-35 mm f / 4,0 L IS | 28 мм | 87 мм | Макс Кайзер |
| Canon EF 16-35 mm f / 4,0 L IS | 35 мм | 91 мм | Макс Кайзер |
| Canon EF 24-70 f / 2,8 л II | 24 мм | 77 мм | Макс Кайзер |
| Canon EF 24-70 f / 2,8 л II | 28 мм | 76 мм | Макс Кайзер |
| Canon EF 24-70 f / 2,8 л II | 35 мм | 69 мм | Макс Кайзер |
| Canon EF 24-70 f / 2,8 л II | 50 мм | 59 мм | Макс Кайзер |
| Canon EF 24-70 f / 2,8 л II | 70 мм | 49 мм | Макс Кайзер |
| Canon EF 85 mm f / 1,8 | 85 мм | 35 мм | Макс Кайзер |
| Canon EF 100 mm f / 2,8 Macro IS | 100 мм | 44 мм | Макс Кайзер |
| Canon EF 135 mm f / 2,0 | 135 мм | 36 мм | Макс Кайзер |
| Canon EF 50 mm f / 1.4 | 50 мм | 17,5 мм | wiki.panotool.org |
| Canon EF 70-200 f / 2,8 л IS USM | 200 мм | 26 мм | wiki.panotool.org |
| Canon EF 70-200 f / 4,0 л USM | 100 мм | 67 мм | wiki.panotool.org |
| Canon EF 70-200 f / 4,0 л USM | 135 мм | 53 мм | вики.panotool.org |
| Canon EF 70-200 f / 4,0 л USM | 70 мм | 92 мм | wiki.panotool.org |
| Canon EF 8-15 мм | 8-15 мм | 64 мм | wiki.panotool.org |
| Canon EF 85 mm f / 1.8 | 85 мм | 39 мм | wiki.panotool.org |
| Canon EF-S 10-22 мм | 10 мм | 56 мм | www.elbgebirge.de |
| Canon EF-S 17-85 мм USM | 17 мм | 62,5 мм | СТАТЬИ |
| Canon EF 20 мм F2.8 USM | 20 мм | 49 мм | 360gradpanoramafoto.de |
| Canon EF 28 мм | 28 мм | 23,5 мм | Panoramamacher.de |
| Canon G9 | 7,4 мм (широкий) | 33.7 мм (от винта штатива) | wiki.panotool.org |
| Canon G9 | 44,4 мм (плотно) | -10 мм (от винта штатива) | wiki.panotool.org |
| Canon PowerShot A630 | 35 мм (широко открытое) | 31 мм | wiki.panotool.org |
| Canon PowerShot A710 IS | 35 мм (широко открытое) | 32 мм | вики.panotool.org |
| Carl Zeiss Jena Flektogon 20 mm f / 4 | 20 мм | 17,5 мм | wiki.panotool.org |
| Konica Minolta 24 f / 2.8 | 24 мм | 21 мм | wiki.panotool.org |
| Nikkor AF 105 мм f2.8D Micro | 105 мм | 32 мм (∞) | wiki.panotool.org |
| Nikkor AF 105 мм f2.8D Micro | 105 мм | 92 мм (1: 1) | wiki.panotool.org |
| Nikkor AF 105 мм f2.8G VR Micro | 105 мм | -50 мм (~, при 1: 1) | wiki.panotool.org |
| Nikkor AF 105 мм f2.8G VR Micro | 105 мм | 30 мм (~, при ∞) | wiki.panotool.org |
| Nikkor AF 135 мм f2D DC | 135 мм | 42 мм | вики.panotool.org |
| Nikkor AF 14 мм f2.8D ED | 14 мм | 48 мм (Зависит от угла) | wiki.panotool.org |
| Nikkor AF 16 mm f2.8D Fisheye | 16 мм | ~ 48 мм рекомендуется, Варьируется: от 37,9 мм (0) до 48 мм (85 ˚) | wiki.panotool.org |
| Nikkor AF 180 мм f2.8D ED | 180 мм | -45 мм | вики.panotool.org |
| Nikkor AF 18 мм f2.8D | 18 мм | 36 мм | wiki.panotool.org |
| Nikkor AF 200 мм f4D ED Micro | 200 мм | -450 мм (1: 1) | wiki.panotool.org |
| Nikkor AF 200 мм f4D ED Micro | 200 мм | -5 мм (1: 2) | wiki.panotool.org |
| Nikkor AF 200 мм f4D ED Micro | 200 мм | 96 мм (∞) | вики.panotool.org |
| Nikkor AF 20 мм f2.8D | 20 мм | 22 мм | wiki.panotool.org |
| Nikkor AF 24 мм f2.8D | 24 мм | 25 мм | wiki.panotool.org |
| Nikkor AF 28 мм f2.8D | 28 мм | 22 мм | wiki.panotool.org |
| Nikkor AF 300 мм f4 ED | 300 мм | -187 мм, -209 мм с TC14B | вики.panotool.org |
| Nikkor AF 35 мм f2.0D | 35 мм | 19,3 мм | wiki.panotool.org |
| Nikkor AF 50 мм f1.4D | 50 мм | 6 мм | wiki.panotool.org |
| Nikkor AF 50 мм f1.8D | 50 мм | 5 мм (f4..f22), 19 мм (f1.8..f2.8 — внутреннее виньетирование перед открытой диафрагмой) | вики.panotool.org |
| Nikkor AF 60 мм f2.8D Micro | 60 мм | 15 мм (∞) | wiki.panotool.org |
| Nikkor AF 60 мм f2.8D Micro | 60 мм | 49 мм (1: 1) | wiki.panotool.org |
| Nikkor AF 80-200 мм f2.8D ED | 135 мм | 6 мм | wiki.panotool.org |
| Nikkor AF 80-200 мм f2.8D ED | 200 мм | -90 мм | wiki.panotool.org |
| Nikkor AF 80-200 мм f2.8D ED | 80 мм | 81,2 мм | wiki.panotool.org |
| Nikkor AF 85 мм f1.8D | 85 мм | 10 мм | wiki.panotool.org |
| Nikkor AF DX 10,5 мм f2,8G ED (бритый, без полей) | 10,5 мм | ~ 47.5 мм рекомендуется для камер FX, Варьируется: см. Выше | wiki.panotool.org |
| Nikkor AF DX 10,5 мм f2,8G ED Fisheye | 10,5 мм | ~ 46 мм рекомендуется, варьируется: от 41,2 (0) до 57 мм (100) | wiki.panotool.org |
| Nikkor AF-S 17-35 мм f2.8D ED | 35 мм | 78,5 мм | wiki.panotool.org |
| Nikkor AF-S 17-35 мм f2.8D ED | 17 мм | 82,5 мм | wiki.panotool.org |
| Nikkor AF-S 24-120 мм f4G ED VR | 24 мм | 71 мм (<25 ˚) Варьируется | wiki.panotool.org |
| Nikkor AF-S 24-120 мм f4G ED VR | 120 мм | 4 мм | wiki.panotool.org |
| Nikkor AF-S 28-70 мм f2.8D ED | 70 мм | 76 мм | вики.panotool.org |
| Nikkor AF-S 28-70 мм f2.8D ED | 28 мм | 97,5 мм | wiki.panotool.org |
| Nikkor AF-S 50 мм f1.8G | 50 мм | 7 мм ~ | wiki.panotool.org |
| Nikkor AF-S 70-200 мм f4G ED VR | 70 мм | 100 мм | wiki.panotool.org |
| Nikkor AF-S 70-200 мм f4G ED VR | 200 мм | -5 мм | вики.panotool.org |
| Nikkor AF-S DX 12-24 мм f4G ED | 12 мм | 71,5 мм | wiki.panotool.org |
| Nikkor AF-S DX 18-55 мм II | 18 мм | 70 мм | wiki.panotool.org |
| Nikkor AF-S DX 18-70 мм | 70 мм | -6,5 мм | wiki.panotool.org |
| Nikkor AF-S DX 18-70 мм | 18 мм | 51 мм | вики.panotool.org |
| Nikkor AF-S DX 18-70 мм | 24 мм | 44 мм | wiki.panotool.org |
| Nikkor AF-S DX 18-70 мм | 35 мм | 33,5 мм | wiki.panotool.org |
| Nikkor AF-S DX 18-70 мм | 50 мм | 24,5 мм | wiki.panotool.org |
| Nikkor AF-S DX 35 мм f1.8G | 35 мм | 18 мм | wiki.panotool.org |
| Nikkor AF-S DX Micro 40 мм f2.8G | 40 мм | 33 мм | wiki.panotool.org |
| Nikkor MF 500 мм f8 Reflex | 500 мм | -335 мм | wiki.panotool.org |
| Nikkor MF 50 мм f1.2 | 50 мм | 16 мм | вики.panotool.org |
| Nikkor PC 28 mm f3.5 shift | 28 мм | 37 мм (без сдвига) | wiki.panotool.org |
| Nikkor PC 35 mm f2.8 shift | 35 мм | 37 мм (без сдвига) | wiki.panotool.org |
| Nikkor PC 85 mm f2.8D Micro Tilt Shift | 85 мм | 74 мм (1: 2) | wiki.panotool.org |
| Nikkor PC 85 мм f2.8D микропереключатель наклона | 85 мм | 39 мм (∞, без наклона) | wiki.panotool.org |
| Nikkor PC-E 24 mm f3.5D ED tilt shift | 24 мм | 85 мм (без наклона) | wiki.panotool.org |
| Nikon C8800 at Wide инф. | 8,9 мм | Центр винта крепления штатива, 75 мм, к входному зрачку | wiki.panotool.org |
| Оптека 0.22X UHD II FishEye | 8 мм (0,22X) | 35,75 мм | wiki.panotool.org |
| Панасоник Lumix DMC-LX3 | 5,1 мм | 28,5 мм | wiki.panotool.org |
| Пентакон 30 мм f3,5 | 30 мм | 17 мм | СТАТЬИ |
| Pentax smc DA 10-17 мм F3. |