Угол обзора объектива таблица: таблица углов обзора и расстояний от камеры до объекта, рассчитать угол обзора, угол обзора видеокамер
Углы обзора видеокамер
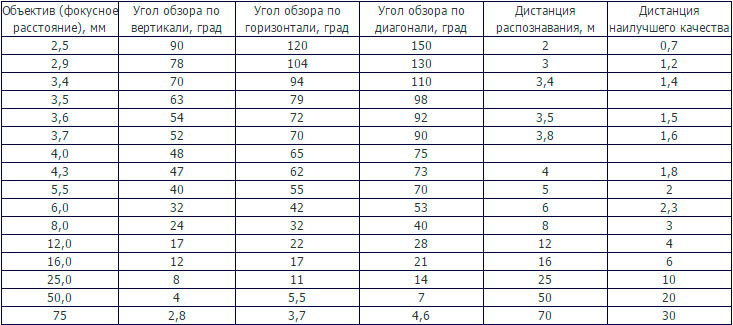
Угол обзора α для объективов (без учёта сферической аберрации) можно рассчитать, зная размер светочувствительного элемента (матрицы) d и эффективное фокусное расстояние объектива F: α = 2arctg(d/2F) Следует учесть, что из-за наличия сильных искажений в короткофокусных объективах угол обзора может отличаться от расчётного. Дистанция распознавания и дистанция идентификации даны для видеокамер с разрешением 360 ТВЛ.
В таблице представлена зависимость угла обзора видеокамер с размером матрицы 1/4″ (формата 4:3) от фокусного расстояния объектива.
В таблице представлена зависимость угла обзора видеокамер с размером матрицы 1/3″ (формата 4:3) от фокусного расстояния объектива.
В таблице представлена зависимость угла обзора видеокамер с размером матрицы 1/2″ (формата 4:3) от фокусного расстояния объектива.
|
 02
02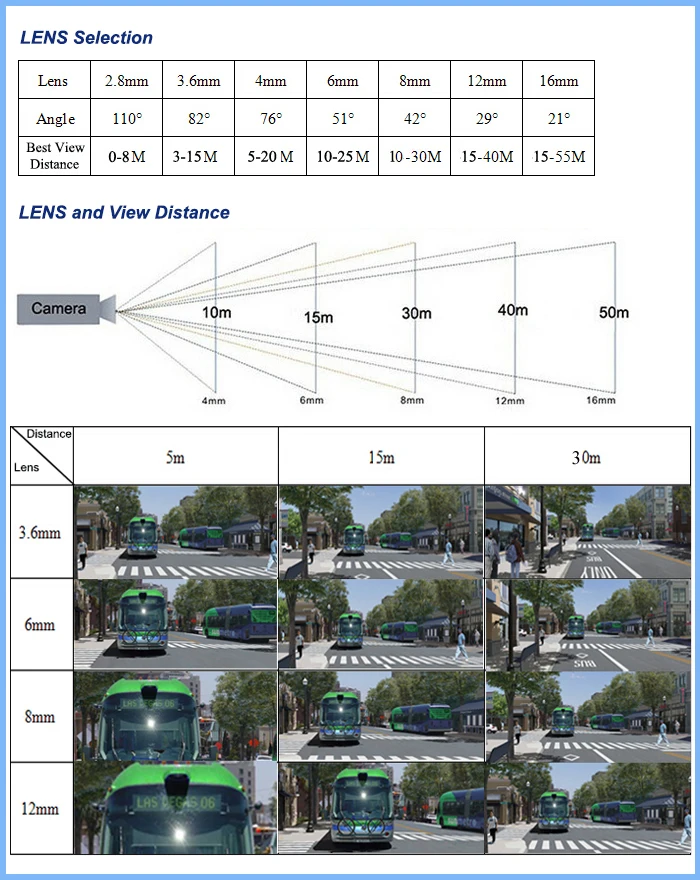 910
910 99
99

 93
93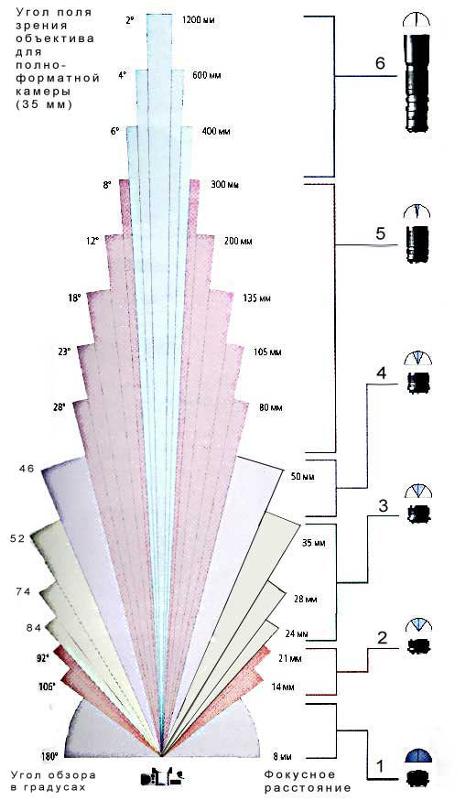 89
89Моделирование дисторсии объектива
Между фактическими значениями углов обзора, приведенными в спецификации камер и объективов и значениями углов полученными расчетом существует разница. Причина разницы — дисторсия объектива. Дисторсия может приводить к значительному отклонению формы зоны обзора от правильной пирамиды и искажению распределения плотности пикселей камеры.
См. подробнее О дисторсии объективов
Учет дисторсии при проектирование видеонаблюдения позволяет получить модели зон обзора и изображений более приближенные к реальности, а значит более полно использовать возможности камер в проекте. |
В спецификациях камер отсутствует параметр Дисторсия объектива, поэтому VideoCAD моделирует дисторсию по реальным углам обзора, которые, как правило, приведены в спецификации.
В данном примере рассматривает точное моделирование дисторсии. Возможно также упрощенное моделирование дисторсии и автоматический выбор способа моделирования дисторсии.
Проще всего моделировать дисторсию объектива камер, в спецификации которых приведены не менее двух реальных углов обзора (горизонтальный и вертикальный). Для моделирования дисторсии достаточно ввести значения двух реальных углов обзора и разрешение картинки в пикселях (из разрешения картинки VideoCAD рассчитает формат кадра).
Несколько сложнее моделировать дисторсию объектива камер, в спецификации которых приведён только один реальный угол обзора (горизонтальный). Для моделирования дисторсии кроме значения одного реального угла потребуются точные . Размеры активной области видеосенсора можно определить по имеющимся в спецификации параметрам, однако у неопытного пользователя это может вызвать затруднение.
См. Задание размера активной области видеосенсора.
Если в спецификации камеры не приведено ни одного реального угла обзора, то дисторсию можно моделировать только приблизительно используя реальные углы обзора похожих камер с таким же фокусным расстоянием объектива и размером активной области видеосенсора. Возможно также измерить реальные углы обзора практически.
Задача
Имеется камера AXIS M1045-LW. Требуется получить модель зоны обзора, распределения плотности пикселей и изображения от этой камеры с учетом дисторсии объектива.
Параметры камеры согласно спецификации производителя:
| • | Размер видеосенсора — 1/3″; |
| • | Фокусное расстояние объектива — 2,8mm; |
| • | Фактический горизонтальный угол обзора — 110 градусов. |
| • | Фактический вертикальный угол обзора — 61 градус. |
| • | Количество пикселей 1920×1080 (максимальное) |
Так как в спецификации приведены 2 угла обзора и разрешение в пикселях, можно моделировать дисторсию по простому пути.
Порядок работы
1. Создаём камеру кликом по кнопке Создать камеру и размещаем её на плане.
2. Открываем окно Геометрия камеры и задаем параметры камеры:
| • | Размер видеосенсора — 1/3″; |
| • | Фокусное расстояние объектива — 2,8mm; |
| • | Акт. пикселей: 1920*1080. |
В окошке Формат кадра должно быть 16/9 (1920/1080=16/9).
3. Кликом по кнопке открываем окно Видеосенсор и объектив.
В окне обращаем внимание на разницу между расчетным углом обзора по горизонтали — 81,2 градусов и фактическим углом по горизонтали из спецификации производителя — 110 градусов. Наличие разницы говорит о том, что дисторсия объектива присутствует.
4. На панели Дисторсия объектива отмечаем переключатель По двум углам и формату кадра. Отмечаем чекбоксы Гориз. и Верт, вводим в окошки известные нам значения реальных углов обзора по горизонтали (110) и вертикали (61).
5. Включаем моделирование дисторсии, выбрав в комбобоксе Моделировать точно и видим значительные изменения проекции Зоны обзора в Графическом окне.
Без учета дисторсии. | С учетом дисторсии. |
Если вы установите значения фактических углов, слишком сильно отличающиеся от расчетных углов либо ведущие к другим противоречиям при расчете дисторсии, то окошки окрашиваются в красный цвет и (или) зона обзора будет выглядеть искаженной.
6. Для наблюдения влияния дисторсии на картинку от камеры, откройте окно 3D Видео и разместите несколько 3D моделей перед камерой.
Без учета дисторсии. | С учетом дисторсии. |
7. Для наблюдения влияния дисторсии на форму зоны обзора в 3D, откройте окно 3D Мир .
Без учета дисторсии. | С учетом дисторсии. |
На картинках видно, что под влиянием дисторсии объектива расширяется поле зрения, но ухудшается пространственное разрешение, особенно по краям. Моделирование дисторсии позволяет это учесть.
См. также: Видеосенсор и объектив>Дисторсия объектива, О дисторсии объективов, Список/Диапазон, Измерение реальных углов обзора камеры
Help URL: http://www. cctvcad.com/videocad_help/index.html?prim_distortion.htm
cctvcad.com/videocad_help/index.html?prim_distortion.htm
Как выбрать объектив камеры видеонаблюдения
Многие при выборе камеры видеонаблюдения замечают, что есть одна и та же модель камеры, но с разными объективами. Почти все задаются вопросом — как правильно выбрать объектив камеры видеонаблюдения, который будет выполнять поставленные задачи? Давайте разберемся в вопросе.
Виды объективов по типу регулировки:
- Монофокальные (с постоянным фокусным расстоянием)
- Вариофокальные (с переменным фокусным расстоянием)
- Трансфокальные (моторизированные зум объективы)
Монофокальные объективы — самые простые в техническом плане и самые бюджетные в финансовом. Имеют постоянное фокусное расстояние и фиксированный угол обзора. Самые популярный тип объективов ввиду низкой стоимости
Вариофокальные — второй по популярности тип объективов. Имеет гораздо больше плюсов, так как сочетает в одной камере сразу много возможностей. Может выступать в качестве широкоугольной камеры высокого разрешения или камеры дальнего действия для определенных целей — таких как идентификация номеров, распознавание лиц в ночное время с большого расстояния и прочее. Из минусов возможная расфокусировка, только ручная регулировка фокусного расстояния и высокая стоимость.
Имеет гораздо больше плюсов, так как сочетает в одной камере сразу много возможностей. Может выступать в качестве широкоугольной камеры высокого разрешения или камеры дальнего действия для определенных целей — таких как идентификация номеров, распознавание лиц в ночное время с большого расстояния и прочее. Из минусов возможная расфокусировка, только ручная регулировка фокусного расстояния и высокая стоимость.
Трансфокальные объективы — максимально универсальны, поскольку позволяют управлять фокусным расстоянием дистанционно. Особенно это востребовано в видеонаблюдении на производстве, когда камеры видеонаблюдения располагаются на существенной высоте и частая регулировка фокусного расстояния требует дополнительных расходов, потому что, как правило, в штате нет ответственного сотрудника за выполнение данной задачи. Требуется привлечение специалистов по обслуживанию систем видеонаблюдения. Дистанционная регулировка реализованная в трансфокальных объективах позволяет производить оперативное изменение фокусного расстояния в конкретный момент времени (увеличение объекта).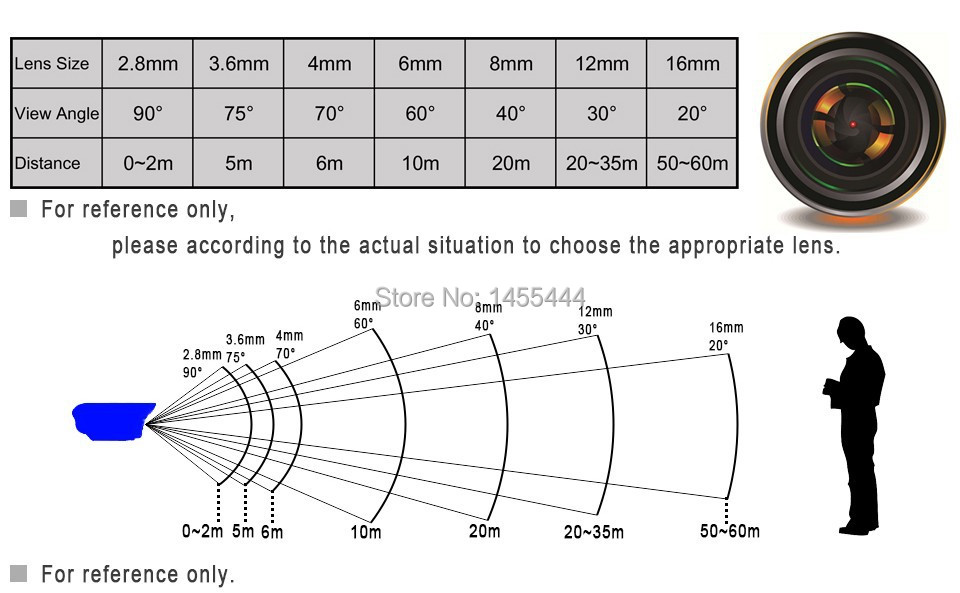
Критерии выбора и основные характеристики объектива
1. Фокусное расстояние
Основным параметром объектива является понятие «Фокусное расстояние».
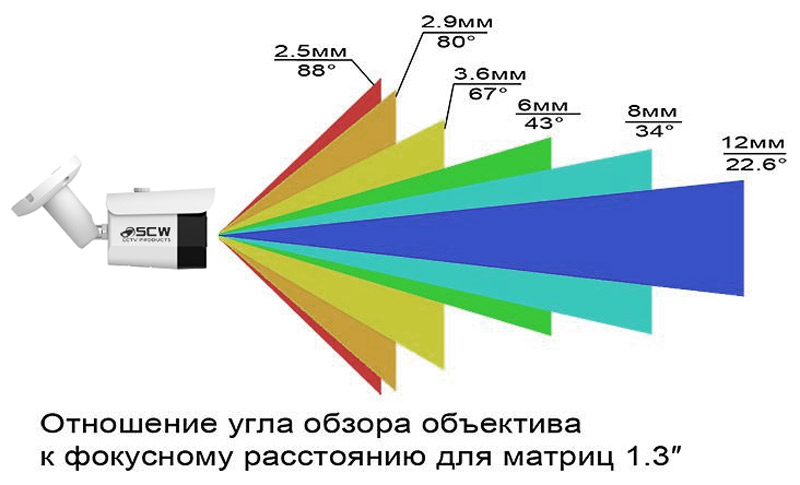
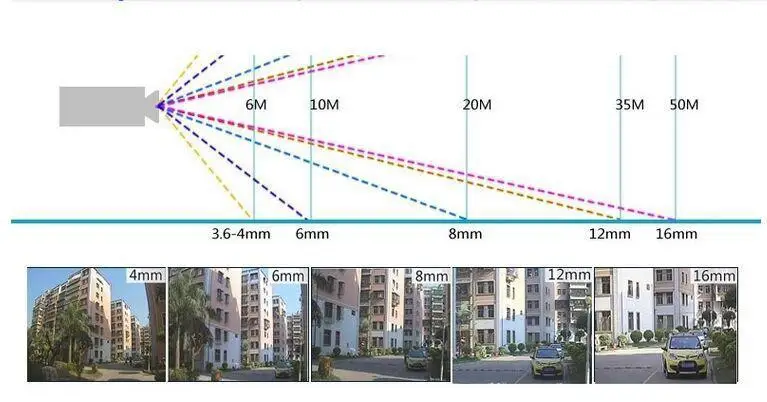
Фокусное расстояние — расстояние в миллиметрах от матрицы камеры до объектива. От него напрямую зависит какой угол обзора будет иметь камера видеонаблюдения и какое расстояние выбрать от камеры видеонаблюдения до объекта. Существует таблица взаимосвязи угла обзора камеры и расстояния до объекта от фокусного расстояния объектива:
В случае если Вам необходимо максимально точно определить необходимое фокусное расстояние, то можете воспользоваться формулами для самостоятельного просчета:
F = v*S/V,
где F – фокусное расстояние, S – расстояние до предмета, V – вертикальный размер предмета, v – вертикальный размер матрицы;
F = h*S/H,
где h – горизонтальный размер матрицы, S — расстояние до объекта, H – ширина предмета.
Значение фокусного расстояния необходимо округлить в большую сторону до ближайшего значения. Угол обзора должен быть максимально широким, чтобы в поле зрения был не только сам объект, но и прилегающая территория.
Соответствие дюймов и фактических размеров матрицы можно взять из таблицы:
| Формат | 1” | ½” | 1/3” | ¼” |
| Высота, мм | 9,6 | 4,8 | 3,6 | 2,4 |
| Ширина, мм | 12,8 | 6,4 | 4,8 | 3,2 |
Задача 1:
Рассчитать необходимое фокусное расстояние.
Видеонаблюдение за КПП шириной 10м. Матрица видеокамеры 1/3”. Видеокамеру монтируют на расстоянии 20м.
F = h*S/H=4,8*20/10=9,6
Задача 2:
Рассчитать расстояние до объекта
КПП шириной 10м. Матрица видеокамеры 1/3”. Фокусное расстояние камеры 12мм.
Воспользуемся формулой:
F = h*S/H.
Из нее путем выведения неизвестного получаем:
S=F*H/h=12*10/4,8=25м
2. Угол обзора
Угол обзора определяет ширину/высоту объекта или иными словами площадь участка, который попадет в поле зрения объектива камеры видеонаблюдения. Широкоугольные камеры с маленьким значением фокусного расстояния позволяют производить общий обзор большой площади с низким качеством детализации. Если стоит задача производить детализированное видеонаблюдение за объектами попадающими в определенную зону, то рекомендуем использовать узкоугольные камеры видеонаблюдения.
Полезные советы:
- Для видеонаблюдения в коридорах, лестницах, вдоль ограждений и зданий используют камеры с узкоугольными объективами от 3° до 30°
- Для видеонаблюдения в офисе, на парковке и дома используют камеры видеонаблюдения с средними значениями угла обзора от 30° до 70°
- Для видеонаблюдения за воротами, входными группами, большими площадками используют камеры видеонаблюдения с широкоугольными объективами от 70° до 95°
Взаимосвязь фокусного расстояния, угла обзора и размер матрицы:
| Фокусное расстояние | матрицы 1/3″ | матрицы 1/4“ | ||
| Угол обзора по | Угол обзора по | Угол обзора по | Угол обзора по | |
| горизонтали | вертикали | горизонтали | вертикали | |
2. 8 мм 8 мм
|
82 | 65 | 65 | 52 |
| 2.9 мм | 80 | 63 | 63 | 50 |
| 3 мм | 77 | 62 | 62 | 48 |
| 3.5 мм | 69 | 55 | 55 | 42 |
| 3.6 мм | 67 | 53 | 53 | 41 |
| 3.7 мм | 66 | 52 | 52 | 40 |
3. 8 мм 8 мм
|
65 | 51 | 51 | 38 |
| 4 мм | 62 | 48 | 48 | 37 |
| 4.2 мм | 60 | 46 | 46 | 36 |
| 4.4 ММ | 57 | 45 | 45 | 34 |
| 4.5 ММ | 56 | 44 | 44 | 33 |
| 5 мм | 51 | 40 | 39 | 30 |
| 6 мм | 43 | 33 | 33 | 25 |
| 7 мм | 38 | 29 | 29 | 22 |
| 8 мм | 34 | 25 | 25 | 19 |
8. 8 мм 8 мм
|
31 | 23 | 23 | 17.5 |
| 10 мм | 27 | 20 | 20.5 | 15.4 |
| 12 мм | 22.6 | 17 | 17 | 12.8 |
| 15 мм | 18.2 | 13.7 | 13.7 | 10.3 |
| 16 мм | 17.1 | 12.8 | 12.8 | 9.6 |
| 25 мм | 8 | 11 |
7. 3 3
|
5.5 |
| 50 мм | 4 | 5.5 | 2.7 | 2.8 |
3. Значение диафрагмы
Регулирует объем светового потока, проходящий через объектив к матрице. Диафрагмы различают фиксированные и автоматические. Если в течение суток степень освещенности объекта кардинально изменяется, то стоит применять объективы с автоматической регулировкой диафрагмы. Иначе в светлое время суток Вы получите солнечные засветы, а в темное — неразличимую детализацию объектов.
При выборе объектива камеры видеонаблюдения учитывают значение параметра диафрагмы — светочувствительность. Единица измерения светочувствительности — 1 Люкс (Лк) или иными словами производная одного Люмена (единица измерения светового потока) на единицу измерения площади (квадратный метр).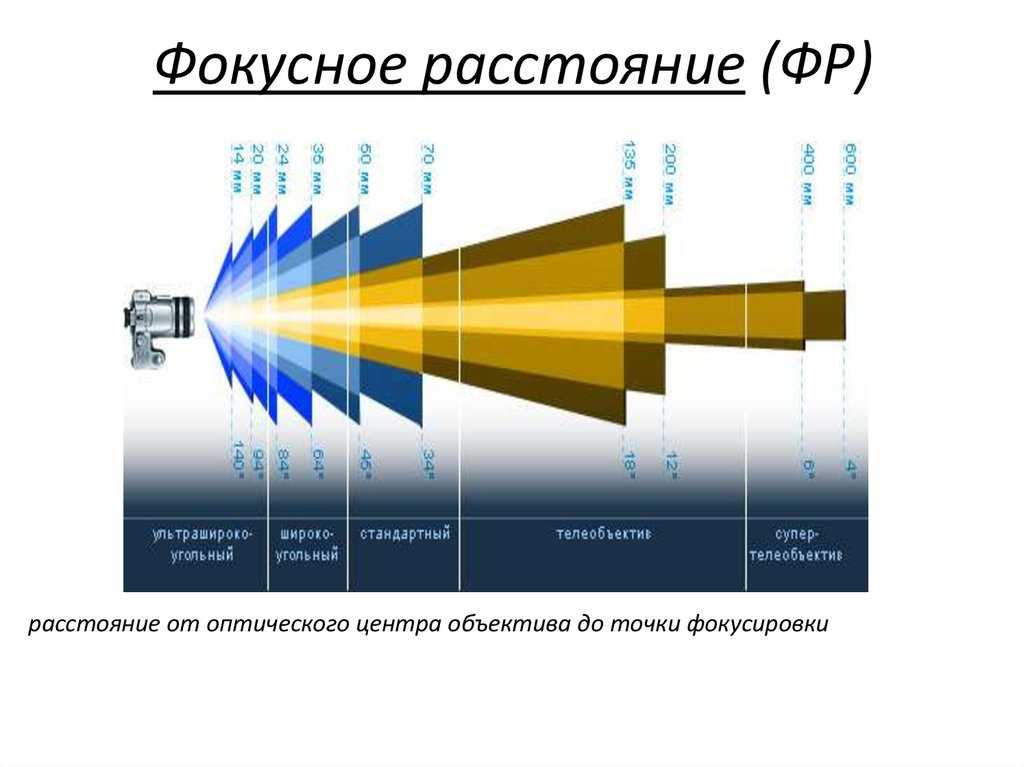 Простыми словами Люмен — минимальное количество света, необходимое для четкого и качественного изображения. Существует зависимость: чем меньше значение светочувствительности, тем позднее камера переходит в черно-белый режим. Чем меньше значение светочувствительности объектива, тем шире будут открываться створки в условиях недостаточной освещенности и тем больше света будет получать матрица, что позволит получить качественное изображение лишенное шумов.
Простыми словами Люмен — минимальное количество света, необходимое для четкого и качественного изображения. Существует зависимость: чем меньше значение светочувствительности, тем позднее камера переходит в черно-белый режим. Чем меньше значение светочувствительности объектива, тем шире будут открываться створки в условиях недостаточной освещенности и тем больше света будет получать матрица, что позволит получить качественное изображение лишенное шумов.
4. Материал линз и корпуса объектива
Материал корпуса на начальном этапе не влияет на качество изображения, но с течением времени пластиковый корпус наиболее сильно подвергается механическим воздействиям окружающей среды. Корпус объектива из пластика с годами может дать такой эффект как помутнение или изменение цветовых параметров объектов. Аналогично происходит и с пластиковыми линзами объектива камеры видеонаблюдения.
Мегапиксельные объективы
Данная категория объективов была разработана благодаря развитию новых технологий и появлением на рынке IP-камер видеонаблюдения. Если Вам необходим объектив с высокой контрастностью и разрешением, то склоните свой выбор в пользу именно мегапиксельных объективов.
Если Вам необходим объектив с высокой контрастностью и разрешением, то склоните свой выбор в пользу именно мегапиксельных объективов.
Достоинства мегапиксельного объектива:
- Высокое разрешение и контрастность
- Высококачественные стеклянные линзы с тонкой шлифовкой
- Сверхпрочный корпус
- Встроенная функция ИК-коррекции
- Повышенная разрешающая способность
- Хорошее качество изображения без искажений даже в углах кадра
ВЫВОД:
Сегодня мы помогли Вам познакомиться с пониятием объектив камер видеонаблюдения и узнать его основные параметры, по которым стоит производить выбор. Но помните, что помимо объектива в камере видеонаблюдения еще много составляющих: матрица, процессор и прочее. И стоит понимать, что для правильного выбора камеры видеонаблюдения под конкретные задачи надо довериться специализированной компании, имеющей в штате высококвалифицированных специалистов.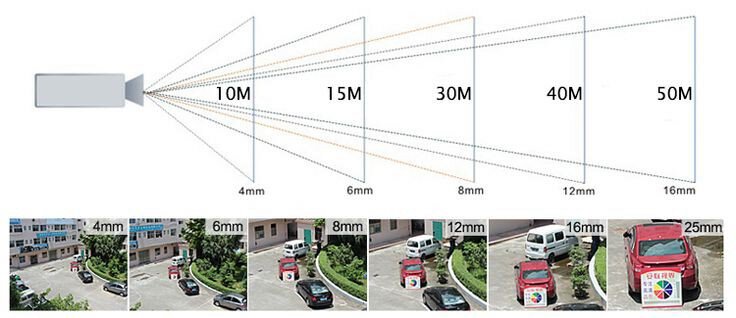 Не стоит экономить на безопасности объекта, особенно это касается стратегических объектов специального назначения.
Не стоит экономить на безопасности объекта, особенно это касается стратегических объектов специального назначения.
Вернуться к списку
Как рассчитать поле зрения в фотографии
Дэн Карр
Поделись с друзьями!
Поскольку я продолжаю наращивать базу фотографических знаний на сайте с помощью таких статей, как «Понимание названий и номеров фильтров нейтральной плотности» и «Понимание диафрагмы», я решил написать краткий пост о том, как рассчитать поле зрения для фотообъектива. . Объективы обычно описываются их фокусным расстоянием, выраженным в мм , но как это соотносится с полем зрения?
Если вы читаете спецификации объективов (да, я такой человек) на веб-сайтах производителей, они часто указывают поле зрения (F.O.V) объектива, а также фокусное расстояние. Когда они делают это в фотографических терминах, они говорят о горизонтальном поле зрения в градусах, и хотя у любого объектива также есть как вертикальное, так и диагональное поле зрения, о них редко говорят в отношении фотографических объективов.
Чем больше поле зрения, тем шире объектив и тем большую часть сцены вы сможете увидеть с помощью своей камеры. Телеобъективы и супертелеобъективы имеют очень маленькое поле зрения, всего несколько градусов, поэтому они не могут видеть большую часть сцены перед собой, хотя компенсирующим достоинством является то, что они до см., в кадре значительно крупнее. Широкоугольный объектив для пейзажной фотографии имеет очень маленькое фокусное расстояние и, следовательно, большое поле зрения, позволяющее снимать широкие пейзажи одним кадром.
Уравнение для расчета угла обзора
Простая тригонометрия даст нам уравнение:
Угол зрения (в градусах) = 2 ArcTan(ширина сенсора / (2 X фокусное расстояние)) * (180/
π) Примечание. Если ваш калькулятор работает в радиан, вам нужна часть (180/π) в конце. если ваш калькулятор работает в градусах, вам не нужен этот бит! Если вы не уверены… это станет довольно очевидным, когда вы запустите уравнение, так как результаты будут совершенно неправильными.
Уравнение для расчета линейного поля зрения
Помимо расчета угла зрения, мы также можем использовать ту же тригонометрию для расчета поля зрения в качестве линейного измерения, если вы знаете расстояние до объекта или , если вы знаете размер вашего объекта и фокусное расстояние, которое вы собираетесь использовать, он может сказать вам, как далеко от него вам нужно находиться, чтобы он заполнил кадр. Единицы измерения в уравнении будут постоянными, поэтому, если вы используете метры в качестве расстояния до объекта, линейное поле зрения также будет в метрах.
Линейное поле зрения = 2 (Tan (угол зрения/2) X расстояние до объекта)Общие фокусные расстояния и соответствующие им поля зрения
кроп-фактор датчика, это еще один способ увидеть влияние кроп-фактора камеры на изображение. Чем меньше сенсор, тем больше кроп-фактор и тем меньше поле зрения для данного фокусного расстояния. Ниже я включил данные для полного поля зрения, а также три наиболее распространенных цифровых кроп-фактора. Если вы хотите узнать больше о кроп-факторе, вы можете прочитать мое руководство: Как рассчитать кроп-фактор камеры.
Если вы хотите узнать больше о кроп-факторе, вы можете прочитать мое руководство: Как рассчитать кроп-фактор камеры.
Если вы хотите использовать формулу поля зрения на этой странице для расчета поля зрения для размера датчика, отличного от четырех, которые были предоставлены, вам необходимо обратиться к этому списку распространенных размеров датчика и их кроп-фактор.
Полная рама 35 мм (ширина датчика 36 мм)
| Фокусное расстояние | Поле вида | |
| 15 мм (Fisheye) | 1800.048 | |
| 14mm | 104.3 | |
| 16mm | 96.7 | |
| 24mm | 73.7 | |
| 35mm | 54.4 | |
| 50mm | 39.6 | |
| 85mm | 23. 9 9 | |
| 100mm | 20.4 | |
| 150mm | 13.7 | |
| 200mm | 10.3 | |
| 300mm | 6.9 | |
| 400mm | 5.2 | |
| 500mm | 4.1 | |
| 600mm | 3.4 | |
| 800mm | 2.6 | |
| 1000mm | 2.1 | |
| 1200mm | 1.7 |
Nikon DX APS-C (1,5x) (ширина сенсора 23,6 мм)
| Фокусное расстояние (35 мм) 7 эквивалентное фокусное расстояние 9 | Field of View | |
| 11mm | 16.5 | 94.0 |
| 14mm | 21 | 80.3 |
| 16mm | 24 | 72.8 |
| 24mm | 36 | 52.4 |
| 35mm | 52.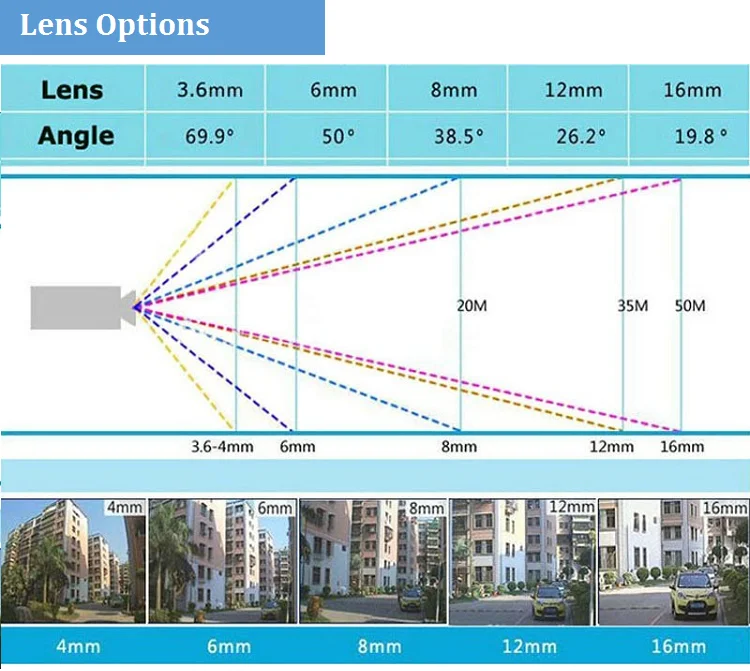 5 5 | 37.3 |
| 50mm | 75 | 26.6 |
| 85mm | 127.5 | 15.8 |
| 100mm | 150 | 13.5 |
| 150mm | 225 | 9.0 |
| 200mm | 300 | 6.8 |
| 300mm | 450 | 4.5 |
| 400mm | 600 | 3.4 |
| 500mm | 750 | 2.7 |
| 600mm | 900 | 2.3 |
| 800mm | 1200 | 1.7 |
| 1000mm | 1500 | 1.4 |
| 1200mm | 1800 | 1.1 |
Canon APS-C (1.6x) (22.5mm sensor width)
Здесь следует отметить, что Canon на протяжении многих лет фактически использовала датчики разного размера для своих камер формата APS-C. Поскольку размер датчика влияет на поле зрения, это следует учитывать, чтобы получить 100% точность. Для приведенной ниже таблицы данных я выбрал ширину сенсора 22,5 мм, потому что это тот размер, который Canon, похоже, придерживался для своих собственных расчетов, и это также размер, который дает точно 1,6-кратный кроп-фактор. Несмотря на то, что на рынке также есть датчики шириной 22,3 мм и 22,4 мм, эта незначительная разница на самом деле не будет иметь заметного значения для ваших изображений, но если вы проведете свои собственные расчеты для своей собственной камеры и обнаружите, что они не соответствуют моим цифрам. , это и будет причиной разницы. Это было источником некоторого головокружения для меня, когда я выяснял все это сам!
Поскольку размер датчика влияет на поле зрения, это следует учитывать, чтобы получить 100% точность. Для приведенной ниже таблицы данных я выбрал ширину сенсора 22,5 мм, потому что это тот размер, который Canon, похоже, придерживался для своих собственных расчетов, и это также размер, который дает точно 1,6-кратный кроп-фактор. Несмотря на то, что на рынке также есть датчики шириной 22,3 мм и 22,4 мм, эта незначительная разница на самом деле не будет иметь заметного значения для ваших изображений, но если вы проведете свои собственные расчеты для своей собственной камеры и обнаружите, что они не соответствуют моим цифрам. , это и будет причиной разницы. Это было источником некоторого головокружения для меня, когда я выяснял все это сам!
| Focal length (35mm) | Equivalent focal length | Field of View |
| 11mm | 17.6 | 91.3 |
| 14mm | 22. 4 4 | 77.6 |
| 16mm | 25.6 | 70.2 |
| 24mm | 38.4 | 50.2 |
| 35mm | 56 | 35.6 |
| 50mm | 80 | 25.4 |
| 85mm | 136 | 15.1 |
| 100mm | 160 | 12.8 |
| 150mm | 240 | 8.6 |
| 200mm | 320 | 6.4 |
| 300mm | 480 | 4.3 |
| 400mm | 640 | 3.2 |
| 500mm | 800 | 2.6 |
| 600mm | 960 | 2.1 |
| 800mm | 1280 | 1.6 |
| 1000mm | 1600 | 1.3 |
| 1200mm | 1920 | 1.1 |
Micro Four Thirds (2x) (ширина сенсора 22,3 мм)
| Фокусное расстояние (35 мм) | Эквивалентное фокусное расстояние | 0045 Field of View|
| 11mm | 22 | 78.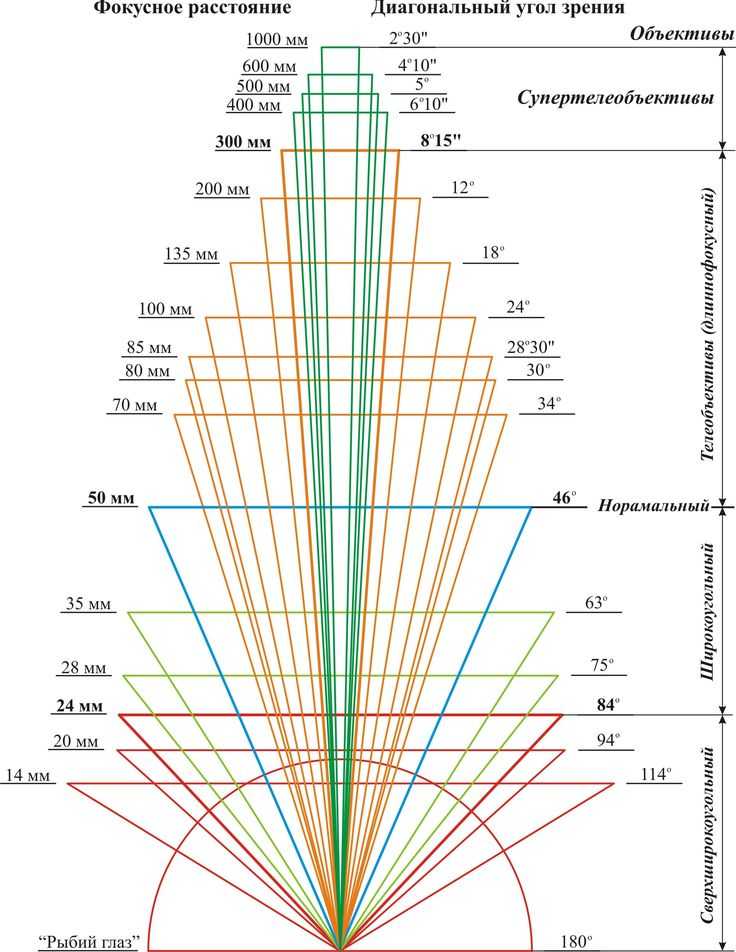 6 6 |
| 14mm | 28 | 65.5 |
| 16mm | 32 | 58.7 |
| 24mm | 48 | 41.1 |
| 35mm | 70 | 28.8 |
| 50mm | 100 | 20.4 |
| 85mm | 170 | 12.1 |
| 100mm | 200 | 10.3 |
| 150mm | 300 | 6.9 |
| 200mm | 400 | 5.2 |
| 300mm | 600 | 3.4 |
| 400mm | 800 | 2.6 |
| 500mm | 1000 | 2.1 |
| 600mm | 1200 | 1.7 |
| 800mm | 1600 | 1.3 |
| 1000mm | 2000 | 1.0 |
| 1200mm | 2400 | 0. 9 9 |
Dan Carr
Professional photographer based in Yukon, Canada, and founder of Shutter Muse. Его редакционная работа освещалась в публикациях по всему миру, а среди его коммерческих клиентов такие бренды, как Nike, Apple, Adobe и Red Bull.
Categories Учебники Tags фокусное расстояние, fov, объективыИзбранные сообщения
5 макетов широкоугольных объективов
Существует два основных метода формирования изображения при проектировании объективов.
Формат изображения в заданном поле зрения в зависимости от уравнения построения изображения
1.1 Типы проекций и уравнение формирования изображения
1.2 Расчет размера изображения для различных типов проекций для 120° FOV
1.3 Соответствующие стандартные форматы датчиков с расчетом высоты изображения для данного углового поля зрения и равного фокусному расстоянию 12,5 мм.
2. Искажение пространства
Искажение пространства
2.1 Определение
2.2 Относительное изменение значения площади с углом зрения перспективной проекции
2.3 Относительное изменение значения площади с углом зрения стереографической проекции
2.4 Относительное изменение значения площади с углом зрения эквидистантной проекции
2.5 Относительное изменение площади площади в зависимости от угла зрения для проекции Equisolid
2.6 Относительное изменение значения площади в зависимости от угла зрения ортогональной проекции
2.7 Резюме
3. Искажение объекта
4. Распределение освещенности
4.1 Распределение освещенности в перспективной проекции
4.2 Распределение освещенности для различных проекций
5. Максимальное теоретическое и допустимое поле зрения объектива773 конструкция с различными проекциями изображения
6.1 Пример объектива с перспективной проекцией
6.2 Пример объектива со стереографической проекцией
6. 3 Пример объектива с эквидистантной проекцией
3 Пример объектива с эквидистантной проекцией
6.4 Пример объектива с эквидистантной проекцией
6.5 Пример объектива с ортогональной проекцией
7. Сравнение высоты изображения и искажения (F-TanTheta в Zemax) для всех типов проекций
8. Заключение
9. Ссылки на теоретические материалы
10. Ссылки на конструкции линз
Перспективная проекция (линзы F-Tan Theta, также называемые прямолинейными или ортоскопическими).
Эквидистантная проекция (объективы F-Theta, также называемые эквиангулярными)
Метод перспективной проекции чаще всего используется при проектировании линз с полем зрения в диапазоне 40-60 градусов. Этот метод формирования сохраняет прямые линии на изображениях, растягивая пространство. Для некоторых типов фотографий, таких как спутниковая съемка, такое растяжение допустимо даже при широких углах. Однако для многих приложений это неприемлемо. На фото справа выше показано изображение с углом обзора 130 градусов и искажениями.
Эквидистантная проекция используется в широкоугольных объективах, таких как объектив типа «рыбий глаз». Он изгибает прямые линии, но может обеспечить угол обзора объектива более 180 градусов (левое фото). Кроме того, эта проекция экономит углы. Это полезно в астрономической фотографии и во многих приложениях на Земле.
Существует 3 менее распространенных метода формирования или проекции изображения:
Стереографический
Equisolid
Ортографические проекции
Ключевые критерии, используемые для оценки того, какие методы лучше всего включают в себя:
Формат изображения в данном поле обзора в зависимости от уравнения изображения
Пространственное искажение
Distort Distort
07070707070705. на изображении
Теоретическое и достижимое поле зрения объектива
- Формат изображения при заданном поле зрения в зависимости от формулы построения изображения
 1 Типы проекций и уравнения формирования изображений
1 Типы проекций и уравнения формирования изображений Таблица 1.1 Высота изображения зависит от закона проекции
𝜔-угол объекта Fov
Y ‘— Высота изображения
FOV
Y’ — Высота изображения
Fov
Y ‘— Высота изображения
FOV
Y’ –
В следующей таблице показано, как размер изображения зависит от типа проекции для данного углового поля зрения
1.2 Расчет размера изображения для различных типов проекций для поля зрения 120°Рис. 1.2 Упрощенная трассировка главного луча для различных проекций. 9′/tan(ω)
Затем для всех остальных типов проекций для расчета высоты изображения использовалось рассчитанное фокусное расстояние f’ =12,5 мм.
Линза нарисована совпадающими главными плоскостями
Различные проекции дают разную высоту изображения для данного углового поля зрения (подробности см. ниже)
1. 3 Соответствующие стандартные форматы датчиков с высотой изображения, рассчитанной для данного углового поля зрения и равной 12,5 мм Фокусное расстояние .
3 Соответствующие стандартные форматы датчиков с высотой изображения, рассчитанной для данного углового поля зрения и равной 12,5 мм Фокусное расстояние . Таблица 1.2 Соответствующие стандартные форматы датчиков с высотой изображения, рассчитанной для данного углового поля зрения и равного фокусному расстоянию 12,5 мм.
2. Пространственная дисторсия 2.1 ОпределениеПространственная дисторсия определяется как отношение параксиальной величины площадей, образуемых малым телесным углом в плоскости изображения для заданного угла ω поля зрения, к площади, формируемой равным значением телесный угол в центре FOV (ω=0).
Вывод значений пространственной дисторсии реализован в [1]
Графики пространственной дисторсии в зависимости от типа проекции показаны ниже.
2.2 Относительное изменение величины площади в зависимости от угла зрения перспективной проекции Имеется необходимое пространство для растяжки для перспективной проекции после 140 град.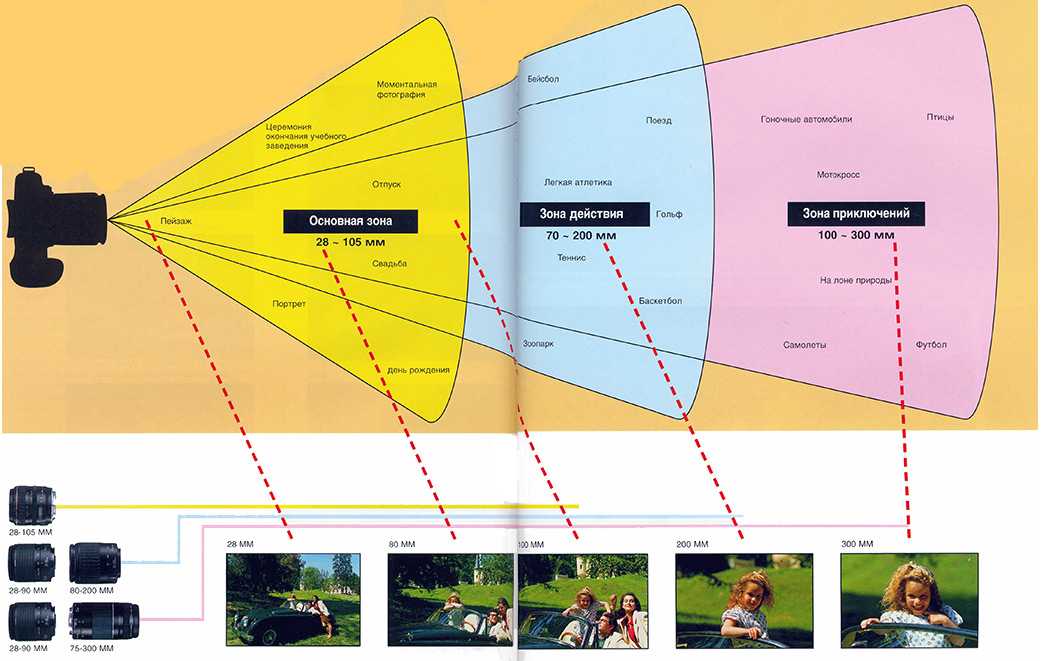
Имеется небольшое пространство для растяжения стереографической проекции до 280 град.
2.4 Относительное изменение значения площади в зависимости от угла зрения эквидистантной проекцииИмеется небольшое пространство для растяжения для эквидистантной проекции после 300 град.
2.5 Относительное изменение квадрата площади с углом обзора для проекции EquisolidДля проекции Equisolid существует даже космическое воображение.
2.6 Относительное изменение значения площади в зависимости от угла обзора ортогональной проекцииИмеется пространство сжатия для ортогональной проекции.
2.7 Резюме
– Растягивание изображения для перспективной, стереографической и эквидистантной проекций.
– Искажение перспективной проекции ограничивает FOV до 120-140 град.
– Стереографические проекции могут обеспечить максимальное угловое поле зрения 210-250 град.
– Равноудаленные проекции могут обеспечить максимальное угловое поле зрения 300-350 град.
-Для ортогональной проекции есть место для сжатия.
– Орфографическая проекция имеет 180 град. ограничение углового поля зрения.
– Для проекции Equisolid отсутствует пространственное искажение.
– Равнотелая проекция может обеспечить максимальное угловое поле зрения до 360 градусов.
3. Искажение объектаПерспективная, Равнопромежуточная, Равнотелая и Ортогональная проекции дают искажение формы мелких объектов через поле зрения.
Только стереографическая проекция сохраняет форму мелких объектов.
Стереографическая проекция сохраняет круги.
Стереографическая проекция конформная – сохраняет углы пересечения двух кривых
4. Распределение освещения 4.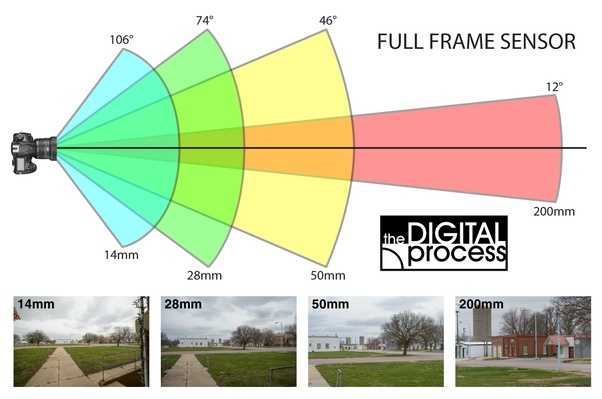 1 Распределение света в перспективной проекции
1 Распределение света в перспективной проекции Максимальное поле зрения ограничено спадом интенсивности на краю изображения.
Хорошо известная формула для перспективной проекции описывает уменьшение распределения света от центра к краю:
Ее можно использовать и для других проекций, если учитывать изменение размера квадрата в плоскости изображения.
Примечание: это уравнение верно, если ω то же самое для пространства объектов, что и для пространства изображений. Освещенность изображения может быть разной, если ω отличается для пространства изображения, что является обычным явлением в реальных оптических системах. Эта тема требует дополнительных пояснений
4.2 Распределение освещенности для различных проекцийСоотношение площадей для Ортогональной проекции
Соотношение площадей для Равнотелой проекции
Для Равноудаленной
Для Стереографической проекции имеет идеально ровное
3 –
Стереографическое изображение.
– Эквидистанта имеет очень медленное снижение интенсивности.
– Равноудаленное, стереографическое и равномерное изображение обеспечивают очень широкое поле зрения из-за медленного падения интенсивности.
5. Максимальное теоретическое и достижимое поле зренияМаксимальное теоретическое поле зрения на основе уравнения проекции, допустимое пространственное искажение и уменьшение освещенности изображения зависят от поля зрения
Специфические свойства конкретных проекций
6. Примеры линз дизайн с различными проекциями изображенияНиже представлены примеры линз для каждой проекции. Объективы с близкими параметрами для каждой проекции были найдены, а затем дополнительно оптимизированы Zemax для соответствия уравнению формирования изображения для каждой проекции.
Угловое поле зрения составляет 120 градусов. для всех образцов
6.1 Пример объектива с перспективной проекциейКомпоновка объектива с перспективной (ортоскопической) проекцией
Дисторсия объектива с перспективной проекцией
Имитация изображения объектива с перспективной проекцией
6. 2 Пример стереографического объектива
2 Пример стереографического объектива Компоновка объектива со стереографической проекцией
Дисторсия объектива со стереографической проекцией
Lens image simulation with stereographic projection
6.3 Example of lens with equidistant projectionLens layout with equidistant projection
Lens distortion with equidistant projection
Lens image simulation with equidistant projection
6.4 Example of объектив с эквидителесной проекциейКомпоновка линз с эквидолидной проекцией
Дисторсия объектива с эквидолидной проекцией
Lens image simulation with equisolid projection
6.5 Example of lens with orthographic projectionLens layout with orthographic projection
Lens distortion with orthographic projection
Lens image simulation with orthographic projection
7. Comparison высоты изображения и искажения
Comparison высоты изображения и искажения (F-TanTheta в Zemax) для всех типов проекций
В данной таблице приведены значения высоты изображения и искажения перспективы (относительно перспективной проекции) для различных типов проекций
8. ЗаключениеМогут быть полезны все типы формирования изображения или проекции. Какой из них зависит от приложения
Перспективная проекция полезна для сохранения прямых линий на изображении. Однако максимальное поле зрения должно быть менее 140 градусов. Широко используется в фотообъективах и аэрофотообъективах.
Стереографическая проекция полезна, если требуется сохранить форму небольшого объекта на плоскости изображения. FOV может быть более 180 град. Это широко используется в системах машинного зрения.
Равнопромежуточная проекция полезна, если требуется сохранение угловых размеров объекта на плоскости изображения.
 FOV может быть более 180 град. Это широко используется в объективах типа «рыбий глаз» и астрономических камерах.
FOV может быть более 180 град. Это широко используется в объективах типа «рыбий глаз» и астрономических камерах.Равнотелая проекция полезна, если требуется сохранение постоянного соотношения телесных углов в пространстве объекта и изображения. FOV может быть более 180 град. Это используется в научной фотографии.
Ортогональная проекция полезна, если требуется равномерность освещения по всей плоскости изображения. FOV может достигать 180 градусов. Это используется в дешевых камерах и дверных глазках.
 FOV может быть более 180 град. Это широко используется в объективах типа «рыбий глаз» и астрономических камерах.
FOV может быть более 180 град. Это широко используется в объективах типа «рыбий глаз» и астрономических камерах.1. Поле зрения – прямолинейные линзы и линзы типа «рыбий»
http://www.bobatkins.com/photography/technical/field_of_view.html
2. Margaret M. Флек. Перспективная проекция: неправильная модель изображения. 1995, Технический отчет 95-01
http://mfleck.cs.illinois.edu/my-papers/stereographic-TR.pdf
3. Модели для различных проекций классических линз
http://michel. thoby .free.fr/Fisheye_history_short/Projections/Models_of_classical_projections.html
thoby .free.fr/Fisheye_history_short/Projections/Models_of_classical_projections.html
4. О различных проекциях фотообъективов
http://michel.thoby.free.fr/Fisheye_history_short/Projections/Various_lens_projection.html
36614472. JP #: 04-267,212
3. Линза формирования изображения и устройство формирования изображения US 200
888 A14. Широкоугольный объектив. Цейсс №1058 страница №0550.
5. Патент Японии 4238312
← Простая система для лазерного уменьшения зернистости Сколько стоит нестандартная линза? →
Похожие сообщения
Нужна помощь в разработке оптики?
Самые популярные сообщения
- 5 Применение цилиндрических линз
- Объяснение оптических систем 4f
- Что лучше CCD или CMOS датчик изображения?
- Использование среднеквадратичной ошибки волнового фронта для оценки оптического качества
- Дизайн и оптимизация ахроматических дублетов
Об искажении объектива
указанные в спецификации, не совпадают с расчетными углами обзора для идеального объектива, исходя из фокусного расстояния объектива и размера матрицы.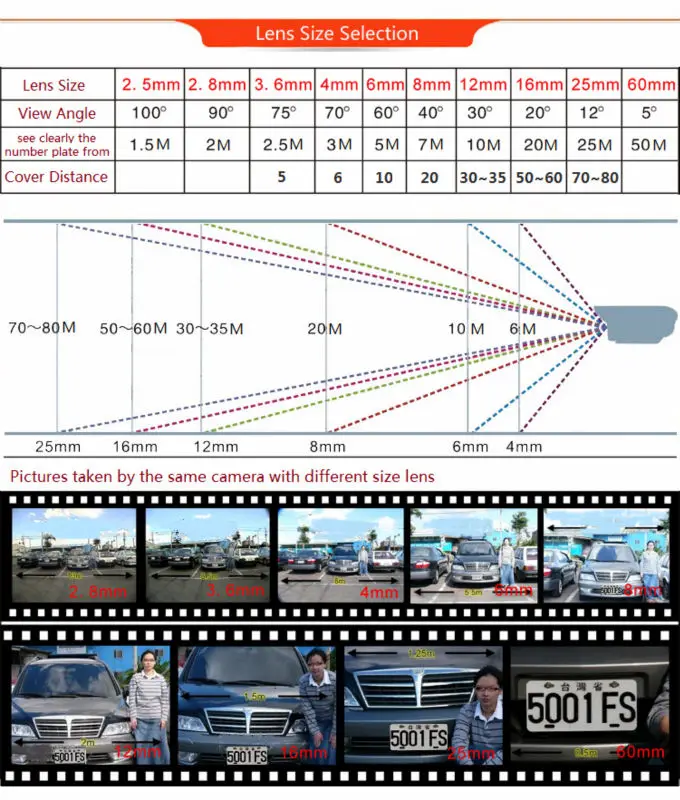
Например, спецификация объектива T2314FICS-3 (Компьютар) содержит следующие значения:
При фокусном расстоянии объектива 2,3 мм и размере матрицы 1/3″ реальный угол обзора по горизонтали составляет 113,30 град. ., а угол обзора по вертикали 86,30 град., но расчет дает меньшие значения — 92,40 град. и 76,10 град. калькуляторы или моделируются программами проектирования видеонаблюдения предыдущего поколения.
Причиной искривления области обзора является дисторсия объектива. Искажение объектива возникает из-за того, что оптическое увеличение реального объектива не является постоянным на всем протяжении. Оптическое увеличение меняется в зависимости от расстояния от центра до краев поля зрения.
В зависимости от того, уменьшается или увеличивается оптическое увеличение объектива по мере удаления от центра поля зрения, различают бочкообразную дисторсию и подушкообразную дисторсию.
Названия бочонок и подушечка для булавок связаны с искажением изображения. А вот форма меняется противоположно названию. Таким образом, при бочкообразной дисторсии изображение напоминает бочонок, а форма поля зрения – подушку. При подушкообразной дисторсии изображение напоминает подушку, а форма поля зрения — бочкообразную.
А вот форма меняется противоположно названию. Таким образом, при бочкообразной дисторсии изображение напоминает бочонок, а форма поля зрения – подушку. При подушкообразной дисторсии изображение напоминает подушку, а форма поля зрения — бочкообразную.
Искажение объектива приводит к деформации:
| • | форма и ; |
| • | изображение с камеры; |
| • | распределение плотности пикселей. |
Линзовую дисторсию не следует путать с Перспективной дисторсией (рис. 7), которая естественна на всех изображениях, полученных широкоугольными объективами. Перспективные искажения не изменяют пирамидальную форму изображения, прямоугольную форму изображения и распределение плотности пикселей.
Бочкообразная дисторсия
Если при удалении от центра оптическое увеличение уменьшается, то объекты по краям поля зрения кажутся сжатыми, а плотность пикселей уменьшается от центра к краям, а поле зрения растягивается к краям .
В частности, объектив T2314FICS-3 имеет как раз бочкообразную дисторсию. Рассмотрим модель изображения от этого объектива, модель поля зрения, построенные проекции зоны обзора с имитацией дисторсии и без нее. Положение камеры в обоих случаях постоянно.
Обратите внимание на искажение распределения плотности пикселей (рис. 4). Бочкообразная дисторсия увеличивает поле зрения, но снижает плотность пикселей, чем дальше от центра поля зрения, тем сильнее.
| ||||||||||||||||||||||||||||||
 Реальные углы в этом случае больше расчетных углов. Это называется бочкообразной дисторсией. Бочкообразная дисторсия наиболее распространена и характерна для широкоугольных объективов.
Реальные углы в этом случае больше расчетных углов. Это называется бочкообразной дисторсией. Бочкообразная дисторсия наиболее распространена и характерна для широкоугольных объективов. При бочкообразной дисторсии штриховка напоминает бочку.
При бочкообразной дисторсии штриховка напоминает бочку. 9,10. Проекция зоны обзора. Границы проекции области просмотра в режиме Проекция.
9,10. Проекция зоны обзора. Границы проекции области просмотра в режиме Проекция.
Подушкообразное искажение
Если при удалении от центра оптическое увеличение увеличивается, то объекты по краям поля зрения кажутся растянутыми, а плотность пикселей увеличивается от центра к краям, а поле зрения сжимается к краям . Реальные углы в этом случае меньше расчетных углов. Это называется подушкообразным искажением. Подушкообразная дисторсия редко возникает при использовании телеобъективов.
Рассмотрим модели, построенные с имитацией дисторсии и без нее. Модели даны для иллюстрации подушкообразной дисторсии, они не привязаны к конкретной модели объектива. Положение камеры в обоих случаях постоянно.
Обратите внимание на искажение распределения плотности пикселей (рис.14). Подушкообразное искажение уменьшает поле зрения, но увеличивает плотность пикселей, причем чем дальше от центра поля зрения, тем сильнее.
| ||||||||||||||||||||||||||||||

 Так как объектив телеобъектив (узкоугольный), искажение перспективы заметно (ср. с рис. 7).
Так как объектив телеобъектив (узкоугольный), искажение перспективы заметно (ср. с рис. 7).
Моделирование дисторсии объектива в VideoCAD
В спецификациях камеры отсутствует параметр «дисторсия объектива», поэтому VideoCAD имитирует дисторсию исходя из реальных углов обзора, которые, как правило, указаны в спецификациях.
Проще всего имитировать дисторсию объектива камер, спецификация которых содержит как минимум два реальных угла обзора (горизонтальный и вертикальный). Для имитации дисторсии достаточно ввести в VideoCAD значения двух реальных углов обзора и разрешения изображения в пикселях (по разрешению изображения VideoCAD рассчитает соотношение сторон).
Несколько сложнее моделировать дисторсию объектива камер, в спецификации которых указан только один реальный угол обзора (горизонтальный). Для имитации дисторсии кроме значения одного реального угла требуются точные. Размеры активной области видеосенсора можно определить и по другим параметрам, имеющимся в спецификации, однако для неопытного пользователя это может вызвать затруднения.
См.: Задание размера активной области видеосенсора.
Если в спецификации камеры не указаны реальные углы обзора, то дисторсия объектива может быть смоделирована только приблизительно, используя реальные углы обзора аналогичных камер с таким же фокусным расстоянием объектива и размером активной области датчика изображения. Измерить реальные углы обзора можно практически.
Если задать значения реальных углов, слишком отличающиеся от расчетных углов, или установить другое несоответствие, то рамка будет окрашена в красный цвет и (или) область просмотра будет искажена. |