
Матрица фотоаппарата это: типы, размер, разрешение, светочувствительность, уход
Уроки фотографии для начинающих. Размер матрицы цифрового фотоаппарата.
Цифровые фотоаппараты все больше входят в нашу жизнь. Всевозможные новинки фототехники заполнили прилавки магазинов. Правильно сориентироваться в этом многообразии весьма непросто, ведь в характеристиках той или иной модели фигурируют специальные термины и, казалось бы одинаковые фотоаппараты, различающиеся лишь несколькими непонятными циферками, имеют совершенно разную стоимость. Немаловажное значение в формировании цены уделяется такому понятию как матрица цифрового фотоаппарата и размер матрицы цифрового фотоаппарата.
Матрица цифрового фотоаппарата — это одна из основных его частей, преобразующая
поступающее на нее с объектива оптическое изображение в цифровое. Следовательно, от матрицы
напрямую зависит качество получаемого снимка. Сама матрица состоит из отдельных элементов —
пикселов.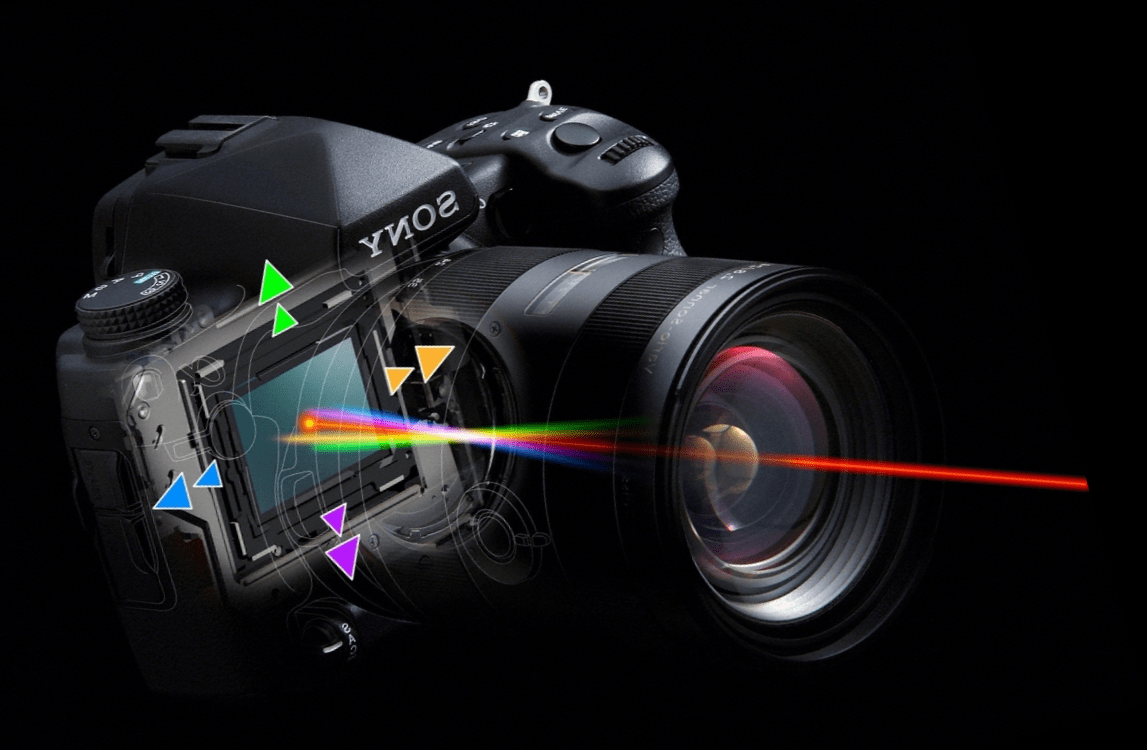
Таким образом, чем большее количество пикселов имеет матрица, тем размер самих пикселов меньше и, соответственно, четкость получаемого изображения выше.
Однако тут есть и обратная сторона. Чем больше пикселов расположено на матрице — тем
больше шумов будет на изображении. Однако заметить эти шумы можно лишь просмотрев
полноразмерное изображение, что в быту нам практически никогда не нужно. Однако если Вы
профессиональный фотограф, либо продаете свои работы в фотобанки, то Ваши работы будут
просматривать на максимальном увеличении. Поэтому в таких случаях лучше или не гнаться за
очень высокими значениями мегапикселов, выбирая фотокамеру со стандартной матрицей и
разрешением 8-10 Мегапикселов, либо использовать матрицу большего размера, тогда шумы
будут незаметны.
В настоящее время самыми распространенными типами матриц являются CCD и CMOS. В любительских цифровых фотоаппаратах в основном используются матрицы CCD , позволяющие считывать сигнал сверху вниз и слева направо. Более дорогие, профессиональные модели имеют матрицу CMOS, где считывание сигнала происходит с любого места матрицы. На обоих типах матриц можно получить очень качественные снимки, так что выбор размера матрицы цифрового фотоаппарата, типа матрицы зависит только от Вашего кошелька и цели, которую Вы ставите при покупке фотоаппарата.
Использование материалов разрешено только при условии размещения активной ссылки на сайт www.photo-lesson.ru
Как выбрать цифровой фотоаппарат. Сколько должно быть мегапикселей
Матрица фотоаппарата
Матрица — один из самых значимых элементов фотоаппарата. В цифровых фотоаппаратах заменяет пленку и представляет из себя плоскую (пока) панельку, содержащую на своей поверхности ячейки — пиксели. Ячейки собирают фотоны света и преобразовывают их в электрические сигналы, которые считываются электроникой камеры и оцифровываются. Но таким образом определяется только количество света, а не его цвет. Чтобы получить цветной пиксель каждая ячейка матрицы прикрыта светофильтром и получает свет только одного из трех основных цветов.
В цифровых фотоаппаратах заменяет пленку и представляет из себя плоскую (пока) панельку, содержащую на своей поверхности ячейки — пиксели. Ячейки собирают фотоны света и преобразовывают их в электрические сигналы, которые считываются электроникой камеры и оцифровываются. Но таким образом определяется только количество света, а не его цвет. Чтобы получить цветной пиксель каждая ячейка матрицы прикрыта светофильтром и получает свет только одного из трех основных цветов.
Матричный цветофильтр.
Это общие принципы устройства сенсоров, но различаются они не только количеством пикселей, а еще и геометрическими размерами. И если профессиональная камера оборудуется полнокадровой матрицей, т. е. ее геометрические размеры эквивалентны размеру 35 мм пленки — 36 х 24 мм, то в вашем смартфоне она значительно меньше.
Физические размеры сенсоров
Понятно, что при одинаковом количестве ячеек, но значительно меньших геометрических размерах сенсора, каждая ячейка тоже становится значительно меньше. Вместе с тем падает ее способность улавливать фотоны света, т. е. она хуже «видит» — падает ее чувствительность. Низкая чувствительность сенсора означает потерю данных и увеличение цифрового шума при недостаточном освещении (шум это разноцветные точки в полученных снимках). Процессор фотоаппарата борется с шумами, но в результате работы «шумодава» снижается качество изображения, оно «замыливается».
Вместе с тем падает ее способность улавливать фотоны света, т. е. она хуже «видит» — падает ее чувствительность. Низкая чувствительность сенсора означает потерю данных и увеличение цифрового шума при недостаточном освещении (шум это разноцветные точки в полученных снимках). Процессор фотоаппарата борется с шумами, но в результате работы «шумодава» снижается качество изображения, оно «замыливается».
С уменьшением площади отдельных ячеек сенсора, падает четкость изображения в мелких деталях. Связано это с тем, что при прохождении в отверстие диафрагмы объектива лучи света отклоняются, образуя на поверхности матрицы центрические круги, так называемый диск Эйри. Диаметр этого диска (кружка рассеивания) зависит только от диаметра отверстия диафрагмы, но если становится сравним с размером пикселя камеры (или предельно допустимого кружка нерезкости), он начинает оказывать визуальное влияние на изображение. Если два диска Эйри оказываются расположены ближе половины их размера, они сливаются в один.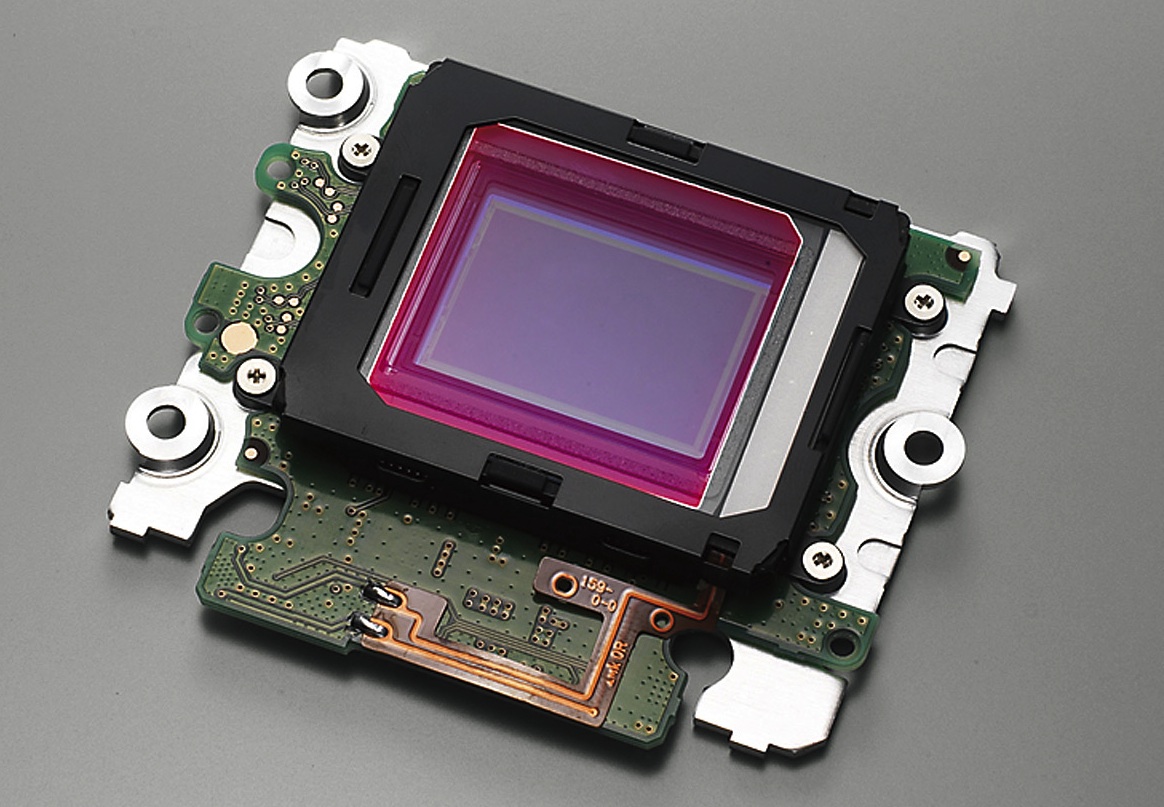
Кружок рассеивания на матрице с разными размерами пикселя
Солнцем цифры не испортишь или О цифровых источниках получения изображений
1 — 2012
Юрий Самарин,
докт. техн. наук,
профессор МГУП
им. Ивана Федорова
Цифровые фотоаппараты (камеры) теперь повсеместно используются в журналистике, издательском деле и полиграфии. Цифровой фотоаппарат по конструкции схож с обычным фотоаппаратом, но вместо фотопленки, на которой фиксируется изображение, у него имеются специальные датчики (фотоматрицы): матричные приборы с зарядовой связью — ПЗС (Charge Coupled Device, CCD) или комплементарные металлооксидные полупроводниковые приборы КМОП (Complementary MetalOxide Semiconductor, CMOS). Эти датчики преобразуют проецируемое на них объективом изображение в цифровую форму.
Известно несколько вариантов конструкции цифровых фотоаппаратов: камеры с задней разверткой, трехкадровые камеры и однокадровые камеры с одной или тремя фотоматрицами. В настоящее время в основном применяются однокадровые фотокамеры.
В настоящее время в основном применяются однокадровые фотокамеры.
Рис. 1. Принцип действия камеры с задней разверткой
Рис. 2. Принцип действия трехкадровой камеры
Камера с задней разверткой производит сканирование в плоскости изображения. Принцип работы такой камеры (рис. 1) напоминает технологию сканирования, реализованную в сканерах с построчным считыванием информации. Сканирующая головка, содержащая линейку светочувствительных ПЗС, перемещается с небольшим шагом вдоль задней фокальной плоскости камеры поперек изображения, регистрируя за каждый шаг одну строку пикселов. Камеры, в которых применяется такой принцип, позволяют получать изображения с высоким разрешением, но время экспозиции может достигать нескольких минут, что делает технику задней развертки непригодной для съемки движущихся объектов или при работе со вспышкой. Во время сканирования затвор камеры остается открытым, поэтому необходимо применять постоянное освещение, так как ни вспышка, ни стробоскоп в данном случае не годятся.
Трехкадровая камера предназначена для регистрации цветных изображений неподвижных объектов (рис. 2). В качестве светочувствительного датчика используется двумерная матрица ПЗС. Плоские двумерные матрицы имеют гораздо меньшее разрешение, чем линейные. Каждый элемент матрицы формирует одну точку изображения. Экспозиция производится с такой скоростью, что можно пользоваться освещением от обычной вспышки.
Для регистрации цветного изображения нужно сделать три отдельных снимка через три светофильтра (красный, зеленый и синий). Между экспонированиями диск со светофильтрами поворачивается таким образом, чтобы в момент съемки перед матрицей находился красный, зеленый или синий фильтр.
Технология, реализованная в однокадровых камерах с одной матрицей, обеспечивает высокую скорость оцифровывания изображения, но характеризуется более низким разрешением и худшей цветопередачей, чем «многоснимочная» технология. Такие камеры называются также камерами с вычислением цветов.
Как и в трехкадровой, в однокадровой камере с одной матрицей (рис. 3) применяется плоская матрица, но данные о цвете регистрируются не через отдельные фильтры, а через нанесенный на поверхность ПЗСматрицы пленочный фильтр, состоящий из красных, зеленых и синих элементов. Данные о каждой точке изображения регистрируются только в одном из трех цветов (например, в красном). Для добавления к нему надлежащих долей зеленого и синего программа обработки интерполирует данные о цветах соседних точек. Поскольку требуется всего одна экспозиция, однокадровые камеры обеспечивают съемку движущихся объектов.
Рис. 3. Принцип действия однокадровой камеры с одной матрицей
Рис. 4. Принцип действия однокадровой камеры с тремя матрицами
Принцип действия однокадровой камеры с тремя матрицами (камеры для однокадровой цветной съемки), в состав которой входят три матрицы, заключается в расщеплении приходящего света на красную, зеленую и синюю составляющие, причем каждая из них направляется на свою матрицу (рис.
Рис. 5. Структурная схема цифрового фотоаппарата
Несмотря на конструктивные различия, цифровые фотоаппараты разного типа имеют в общем одну структуру (рис. 5).
Основными компонентами цифрового фотоаппарата являются объектив, фотоматрица (ПЗС или КМОП), жидкокристаллический дисплей (ЖКД), звуковая карта, карта памяти и процессор, в состав которого входят аналогоцифровой преобразователь, устройство управления экспозицией и фокусировкой и устройство формирования файла и сжатия цифрового изображения.
Объектив фотоаппарата представляет собой набор линз, вставленных в тубус, и предназначен для формирования резкого изображения на поверхности светочувствительного сенсора (ПЗС или КМОП), расположенного в фокальной плоскости объектива.
В современных цифровых фотоаппаратах применяются объективы с переменным фокусным расстоянием, которые имеют сложную оптическую схему, так как при любом положении его подвижных элементов требуется сохранять аберрации в заданных пределах.
Среди технических характеристик объектива важнейшей является разрешающая способность, которая определяет возможности объектива передавать мелкие детали. Измеряется разрешающая способность объектива в линиях на миллиметр, для чего фотографируют испытательную таблицу — специальное тестовое изображение с тонкими линиями. То место, где отдельные линии становятся неразличимы, считается порогом разрешающей способности. Разрешающая способность объектива в оптическом центре линз всегда выше, чем по краям. Хорошим считается объектив, у которого разница между разрешающей способностью в центре и по краям кадра не превышает 30%.
Рис. 6. Зависимость углов обзора от фокусного расстояния объектива
Объективы современных цифровых фотоаппаратов имеют просветление, которое позволяет избавиться от так называемых паразитных лучей, возникающих вследствие попадания в объектив лучей света под большим углом. Поверхность линзы преломляет эти лучи, которые затем многократно отражаются от поверхности внутренних линз. Паразитные лучи не участвуют в построении изображения на поверхности светочувствительного сенсора. Чтобы избавиться от паразитных отражений, переднюю линзу объектива покрывают просветляющим слоем полимера, имеющего иной коэффициент преломления, нежели стекло передней линзы. Толщина слоя подбирается под длину светового луча определенного участка спектра. При попадании на линзу объектива бокового светового луча он отражается от внутренней поверхности просветляющей пленки, возвращается и складывается с совпадающим по фазе колебаний основным световым лучом, участвующим в построении изображения, усиливая при этом общий световой поток. В результате пленка улучшает светопропускающую способность объектива, поэтому и называется просветляющей.
Поверхность линзы преломляет эти лучи, которые затем многократно отражаются от поверхности внутренних линз. Паразитные лучи не участвуют в построении изображения на поверхности светочувствительного сенсора. Чтобы избавиться от паразитных отражений, переднюю линзу объектива покрывают просветляющим слоем полимера, имеющего иной коэффициент преломления, нежели стекло передней линзы. Толщина слоя подбирается под длину светового луча определенного участка спектра. При попадании на линзу объектива бокового светового луча он отражается от внутренней поверхности просветляющей пленки, возвращается и складывается с совпадающим по фазе колебаний основным световым лучом, участвующим в построении изображения, усиливая при этом общий световой поток. В результате пленка улучшает светопропускающую способность объектива, поэтому и называется просветляющей.
Просветляющее покрытие изготавливается многослойным — оно включает до десяти слоев, расположенных один над другим. Каждый слой настроен на волны определенного участка спектра, поэтому покрытие в целом способно работать с волнами любой длины.
Важнейшей характеристикой цифрового фотоаппарата является фокусное расстояние объектива, вернее — оптический зум (zoom), который определяет способность объектива варьировать фокусное расстояние при неизменном положении плоскости изображения (фотоматрицы). Варьирование фокусного расстояния позволяет динамически изменять масштаб съемки, увеличивать или уменьшать размеры изображения. При изменении масштаба в объективе происходит перестановка линз, в результате которой меняется фокусное расстояние.
На любительских камерах зум фотоаппарата обычно обозначается кратностью (отношение минимального фокусного расстояния к его максимальному значению). Например, зум фотоаппарата 4х — это 4кратный зум.
На профессиональных камерах указывается непосредственно фокусное расстояние объектива, например 2470 мм — минимальное и максимальное фокусные расстояния соответственно.
Наряду с оптическим зумом цифровые фотоаппараты обладают цифровым зумом, с помощью которого происходит «программное» увеличение изображения: картинку, которую фотоаппарат получает через объектив, он кадрирует (вырезает и увеличивает фрагмент). При этом снижается качество изображения: возрастает количество шумов, теряется детализация и падает разрешение. При цифровом зуме, увеличивающем изображение вдвое, разрешение 12 мегапикселов превращается в 3 мегапиксела.
При этом снижается качество изображения: возрастает количество шумов, теряется детализация и падает разрешение. При цифровом зуме, увеличивающем изображение вдвое, разрешение 12 мегапикселов превращается в 3 мегапиксела.
От величины фокусного расстояния объектива зависит угол обзора. Чем меньше фокусное расстояние объектива, тем больше угол обзора и, наоборот, чем больше фокусное расстояние, тем меньше угол обзора объектива. На рис. 6 приведены примерная схема углов обзора и фокусных расстояний и классификация объективов.
Длинные фокусные расстояния позволяют снимать удаленные предметы крупным планом с большим увеличением. При фотографировании с большим увеличением особенно сложно стабилизировать изображение изза дрожания рук фотографа, что приводит к смазыванию кадра. Современные цифровые фотоаппараты снабжены системой стабилизации изображения. Для этого в них встроены специальные сенсоры, работающие по принципу гироскопов или акселерометров. Эти сенсоры постоянно определяют углы поворота и скорости перемещения фотоаппарата в пространстве и выдают команды электрическим приводам, которые отклоняют стабилизирующий элемент объектива или матрицу.
Стабилизирующий элемент объектива, подвижный по вертикальной и горизонтальной осям, по команде с сенсоров отклоняется электрическим приводом системы стабилизации так, чтобы проекция изображения на матрице полностью компенсировала колебания фотоаппарата за время экспозиции.
В результате при малых амплитудах колебаний фотоаппарата проекция всегда остается неподвижной относительно матрицы, что и обеспечивает картинке необходимую четкость. Однако наличие дополнительного оптического элемента снижает светосилу объектива.
В некоторых цифровых моделях движение (дрожание) фотоаппарата компенсируется не оптическим элементом внутри объектива, а его матрицей, закрепленной на подвижной платформе.
Подобные объективы являются более дешевыми, простыми и надежными, стабилизация изображения работает с любой оптикой. Это важно для зеркальных фотоаппаратов, имеющих сменную оптику. Стабилизация со сдвигом матрицы, в отличие от оптической, не вносит искажений в изображение и не влияет на светосилу объектива. В то же время считается, что стабилизация со сдвигом матрицы менее эффективна, нежели оптическая стабилизация, так как с увеличением фокусного расстояния объектива матрице приходится совершать слишком быстрые перемещения со слишком большой амплитудой и она не успевает за «ускользающей» проекцией.
В то же время считается, что стабилизация со сдвигом матрицы менее эффективна, нежели оптическая стабилизация, так как с увеличением фокусного расстояния объектива матрице приходится совершать слишком быстрые перемещения со слишком большой амплитудой и она не успевает за «ускользающей» проекцией.
Существует электронная (цифровая) стабилизация изображения, при которой примерно 40% пикселов на матрице отводятся на стабилизацию изображения и не участвуют в формировании картинки. При дрожании видеокамеры картинка «плавает» по матрице, а процессор фиксирует эти колебания и вносит коррекцию, используя резервные пикселы для компенсации дрожания изображения. Такая система стабилизации широко применяется в цифровых видеокамерах с матрицами небольшого разрешения — имея более низкое качество, чем прочие типы стабилизации, она оказывается дешевле, поскольку не содержит дополнительных механических элементов.
Существует три типичных режима работы системы стабилизации изображения: однократный, или кадровый, непрерывный и режим панорамирования.
В однократном, или кадровом, режиме система стабилизации активируется только на время экспозиции в момент съемки, что теоретически наиболее эффективно, так как требует минимальных корректирующих перемещений.
В непрерывном режиме система стабилизации работает постоянно, что облегчает фокусировку, но эффективность при этом может оказаться несколько ниже, поскольку в момент экспозиции корректирующий элемент может быть уже смещенным, что снижает его диапазон корректировки. Кроме того, в непрерывном режиме система потребляет больше электроэнергии, что приводит к более быстрой разрядке аккумулятора.
В режиме панорамирования система стабилизации компенсирует только вертикальные колебания. При фотографировании с большим увеличением или при больших выдержках рекомендуется использовать штатив.
Диафрагма фотоаппарата — это устройство, которое влияет сразу на два параметра объектива: светосилу, определяющую количество света, проходящего внутрь фотоаппарата, и глубину резкости, от которой зависит величина предельного несовпадения плоскости светочувствительного материала (в пленочном фотоаппарате) или фотоматрицы (в цифровом фотоаппарате) и плоскости оптического изображения, воспроизводимого на этом материале.
При несовпадении этих плоскостей изображение получается нерезким.
Диафрагма предназначена для ограничения пучков лучей в оптической системе и позволяет регулировать освещенность фотоматрицы путем изменения диаметра (апертуры) отверстия входного зрачка объектива.
Рис. 7. Изменение апертуры диафрагмы
Широкое применение имеют ирисовые диафрагмы, плавно изменяющие в заданных пределах действующее отверстие объектива. Ирисовая диафрагма состоит из набора тонких дугообразных пластинок (лепестков), кольцевой оправы и поворотного кольца (коронки). На концах лепестков имеются штифты. Один штифт (осевой) каждого лепестка входит в отверстие кольцевой оправы, другой (ведомый) — в соответствующий радиальный паз поворотного кольца. При повороте коронки все лепестки поворачиваются в оправе, изменяя диаметр отверстия диафрагмы.
На рис. 7 схематически показано действие ирисовой диафрагмы при изменении ее апертуры от f/2 до f/22.
Для открывания пути прохождения света в оптическую систему объектива и экспонирования фотоматрицы цифровые фотоаппараты оснащаются механическими или электронными затворами. Механический затвор фотоаппарата приоткрывает шторки для попадания света на фотоматрицу. От продолжительности приоткрытия затвора (выдержки) зависит экспозиция кадра. Электронный затвор встроен в фотоматрицу и управляет ее включением и выключением.
Механический затвор фотоаппарата приоткрывает шторки для попадания света на фотоматрицу. От продолжительности приоткрытия затвора (выдержки) зависит экспозиция кадра. Электронный затвор встроен в фотоматрицу и управляет ее включением и выключением.
Цифровые фотоаппараты можно разделить по конструкции оптической системы на два типа (рис. 8): зеркальная фотокамера и цифровой компакт. При этом основным признаком типа является система визирования изображения. В процессе визирования фотограф рассматривает в видоискатель оптическое изображение, которое он собирается зарегистрировать в виде цифровых данных.
Рис. 8. Оптическая система цифрового фотоаппарата: а — зеркальной фотокамеры; б — цифрового компакта
Рис. 9. Светочувствительный элемент фотоматрицы с цветным фильтром и микролинзой
Оптическая система зеркальной фотокамеры (см. рис. 8а) состоит из объектива 1, датчика системы автофокусировки 2, зеркала автофокусировки 3, затвора 4, фотоматрицы 5, поворотного зеркала 6, окуляра видоискателя 7, пентапризмы 8 и фокусировочного экрана 9.
В зеркальной камере при визировании фотограф наблюдает в видоискатель оптическое изображение, спроецированное на фокусировочный экран. Изображение на фокусировочном экране 9 формируется тем же световым пучком, который проецируется на фотоматрицу 5 в момент фотосъемки. Достигается это с помощью поворотного зеркала 6, благодаря которому конструктивный тип фотокамер и получил свое название. Зеркало может фиксироваться в двух положениях. В процессе визирования оно направляет прошедший через объектив световой пучок на фокусировочный экран, а в момент съемки зеркало 6 поднимается, открывается затвор 4, и световой поток попадает непосредственно на фотоматрицу 5. Кроме контроля над будущим снимком, зеркальная камера дает возможность использовать разные объективы, которые конструктивно и оптически совместимы с данной камерой. Большинство профессиональных и полупрофессиональных камер являются зеркальными.
С применением пентапризмы 8, которая имеет крышеобразную (первую по ходу лучей света) отражающую грань, становится возможным наблюдать в окуляр 7 прямое изображение. Фокусировочный экран 9 предназначен не только для того, чтобы на его матированной стеклянной поверхности формировалось спроецированное изображение объекта съемки, но и для точной фокусировки в ручном (не автоматическом) режиме. Соответствие границ изображения, наблюдаемого через видоискатель, тому, что проецируется на матрицу (поле зрения видоискателя), является важной характеристикой качества зеркальной камеры. У хороших камер оно составляет 90100%. Меньшие показатели заставляют фотографа делать мысленную поправку, учитывая, что реально снятый кадр будет несколько больше того, что он видит в видоискателе.
Фокусировочный экран 9 предназначен не только для того, чтобы на его матированной стеклянной поверхности формировалось спроецированное изображение объекта съемки, но и для точной фокусировки в ручном (не автоматическом) режиме. Соответствие границ изображения, наблюдаемого через видоискатель, тому, что проецируется на матрицу (поле зрения видоискателя), является важной характеристикой качества зеркальной камеры. У хороших камер оно составляет 90100%. Меньшие показатели заставляют фотографа делать мысленную поправку, учитывая, что реально снятый кадр будет несколько больше того, что он видит в видоискателе.
В цифровом компакте (см. рис. 8б) световой поток всегда направлен на светочувствительную матрицу 5, данные об изображении с которой после соответствующих преобразований в электронном блоке 6 обработки видеосигнала поступают на жидкокристаллический экран малогабаритного дисплея 7. В момент фотографирования срабатывает затвор 4, который закрывается, открывается на время экспонирования и после получения данных об изображении закрывается и снова открывается для визирования следующего кадра.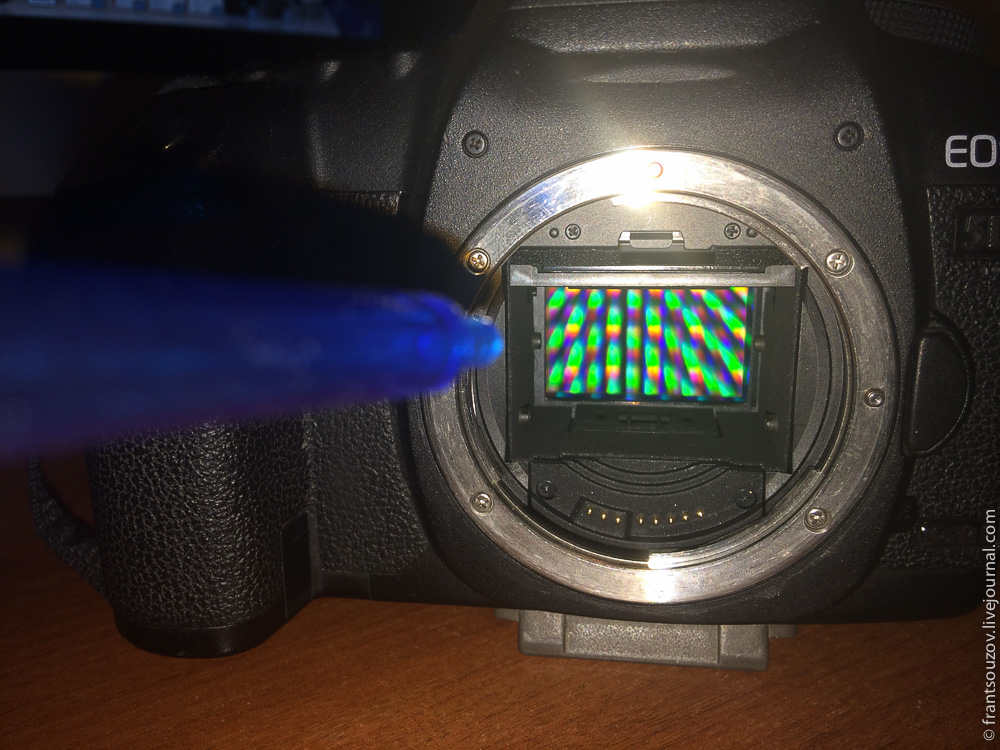 Такой системе визирования присущи следующие недостатки: жидкокристаллический экран имеет ограниченное разрешение и ограниченный цветовой охват, поэтому по изображению на небольшом экране сложно оценить резкость. Преимущество данной системы в том, что яркость изображения на электронном экране может быть всегда достаточной для комфортного просмотра, в то время как в зеркальных камерах яркость изображения в видоискателе зависит от условий освещенности объекта или вспышки. Разрешение встроенных дисплеев в современных цифровых камерах обычно составляет 230 000 пикселов, но может достигать 920 000 пикселов при размере экрана 23 дюйма.
Такой системе визирования присущи следующие недостатки: жидкокристаллический экран имеет ограниченное разрешение и ограниченный цветовой охват, поэтому по изображению на небольшом экране сложно оценить резкость. Преимущество данной системы в том, что яркость изображения на электронном экране может быть всегда достаточной для комфортного просмотра, в то время как в зеркальных камерах яркость изображения в видоискателе зависит от условий освещенности объекта или вспышки. Разрешение встроенных дисплеев в современных цифровых камерах обычно составляет 230 000 пикселов, но может достигать 920 000 пикселов при размере экрана 23 дюйма.
Цифровые фотоаппараты снабжены системой автоматической фокусировки объектива — так называемым автофокусом. Автофокус построен на основе оптикоэлектронных устройств, которые оценивают резкость создаваемого объективом оптического изображения. Результаты этой оценки обрабатываются процессором и преобразуются в сигнал управления встроенными в объектив миниатюрными электроприводами подвижных компонентов объектива.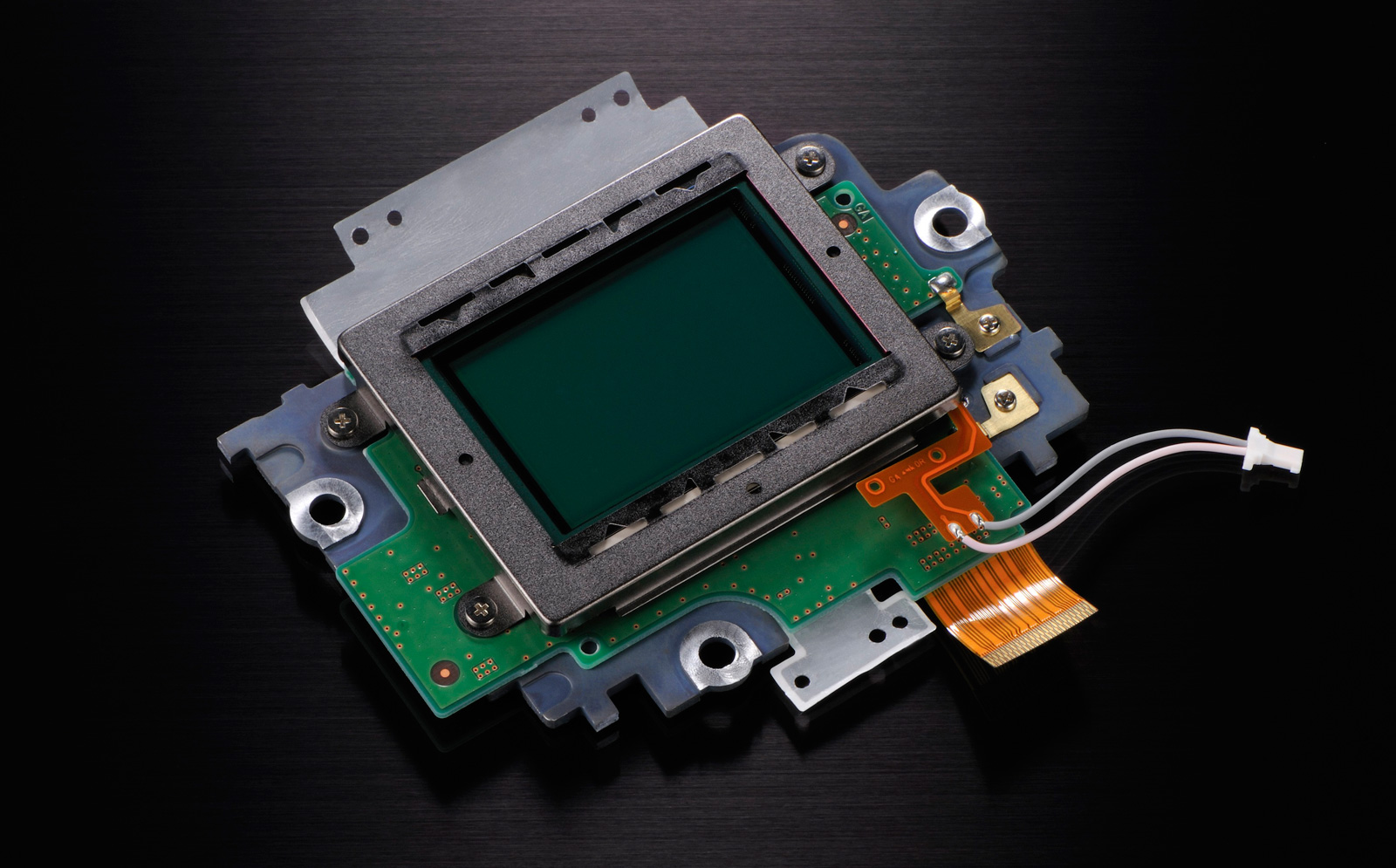 Автофокус осуществляет настройку фотоаппарата на съемку конкретного объекта быстрее, чем это делает фотограф вручную с помощью видоискателя.
Автофокус осуществляет настройку фотоаппарата на съемку конкретного объекта быстрее, чем это делает фотограф вручную с помощью видоискателя.
Применяются два режима работы системы автофокуса: контрастнодетекторный и фазодетекторный. Цифровой компакт наводит на резкость, ориентируясь на контраст оптического изображения, сфокусированного объективом в целом в плоскости фотодетектора 2 (см. рис. 8б), — это контрастнодетекторный метод.
Принцип работы контрастнодетекторной системы автофокуса основан на том, что диапазон яркостей — разность яркостей между самым ярким и самым темным участками — в сфокусированном изображении больше, чем в размытом.
В цифровых компактах сигнал изображения, снимаемый с фотоматрицы 5 (см. рис. 8б), используется для работы системы автофокусировки. Система управления постепенно перемещает подвижные линзы объектива, фокусируя объектив. По мере наводки объектива на резкость изображение становится более контрастным.
В зеркальных камерах применяется фазодетекторный метод, при котором автофокус работает с несколькими резкими изображениями, сформированными разными частями объектива.
Принцип работы фазодетекторного способа автофокусировки основан на том, что в сфокусированном состоянии различные области объектива формируют в фокальной плоскости одинаковые оптические изображения, которые, будучи совмещенными друг с другом, формируют одно резкое изображение предмета. Если же объект не сфокусирован, то в плоскости фотодетектора формируется несколько сдвинутых друг относительно друга изображений предмета.
При хорошей фокусировке все лучи, исходящие из одной точки предмета, фокусируются в одну точку на фотодетекторе. В результате сенсор захватывает одно резкое и контрастное изображение предмета, которое и фотографируется.
На большинстве цифровых фотоаппаратов установлена встроенная вспышка. Такое приспособление способно осветить пространство на расстоянии не более 3 м от фотографа. Необходимость в ней появляется, когда недостаточно естественного или искусственного освещения. Вспышка применяется при репортажной съемке. В случае если светит солнце или есть возможность осветить объект лампами, она не нужна. Если расстояние до объекта более 3 м, приходится использовать отдельную, более мощную вспышку; для нее на многих аппаратах предусмотрены специальные крепежные салазки и контакт синхронизации. Объект, расположенный дальше 10 м, не удастся осветить никакой вспышкой.
Необходимость в ней появляется, когда недостаточно естественного или искусственного освещения. Вспышка применяется при репортажной съемке. В случае если светит солнце или есть возможность осветить объект лампами, она не нужна. Если расстояние до объекта более 3 м, приходится использовать отдельную, более мощную вспышку; для нее на многих аппаратах предусмотрены специальные крепежные салазки и контакт синхронизации. Объект, расположенный дальше 10 м, не удастся осветить никакой вспышкой.
Элементы ПЗС и КМОПматриц примерно одинаково чувствительны ко всем цветам видимого спектра света. Поэтому для получения цветного изображения в цифровых фотоаппаратах применяются в основном три технологии цветоделения, каждая из которых имеет свои достоинства и недостатки. В первой технологии используются специальные цветоделительные призмы с дихроичными светофильтрами и три фотоматрицы (3 CCD), каждая из которых создает цифровое цветоделенное изображение одного из основных цветов: красного, зеленого, синего (цветовая модель RGB). Во второй технологии применяются цветоделительные светофильтры Байера и одна фотоматрица, а в третьей — специальные «трехслойные» фотоматрицы, каждая из которых позволяет получить сразу все три цветоделенных изображения.
Во второй технологии применяются цветоделительные светофильтры Байера и одна фотоматрица, а в третьей — специальные «трехслойные» фотоматрицы, каждая из которых позволяет получить сразу все три цветоделенных изображения.
Достоинствами использования цветоделительных призм являются:
- лучшая передача цветовых переходов, полное отсутствие цветного муара;
- отсутствие алгоритмов для восстановления потерянной информации, обязательных для одноматричных систем с массивом цветных фильтров;
- более высокое разрешение, так как каждая из трех матриц полностью используется для создания цифрового цветоделенного изображения;
- возможность цветокоррекции за счет постановки дополнительных фильтров перед отдельными матрицами, что позволяет добиться гораздо более высокой цветопередачи при нестандартных источниках света;
- возможность повышения эффективного разрешения вдвое по одной из координат путем сдвига трех матриц друг относительно друга на 1/3 пиксела и проведения интерполяции трех изображений с учетом этого сдвига.


Недостатками этой технологии являются:
- принципиально большие размеры цифрового фотоаппарата изза наличия трех фотоматриц и использования объективов с большими рабочими отрезками;
- проблема сведения цветов, для решения которой требуется точная юстировка. Чем больше размер матриц и выше их физическое разрешение, тем сложнее добиться необходимого класса точности.
В технологии с применением цветоделительных светофильтров на каждом светочувствительном элементе фотоматрицы устанавливается светофильтр, который пропускает свет с определенным спектром излучения. Часто в таких фотоматрицах цветной фильтр сверху закрывается микролинзой (рис. 9), которая служит для дополнительной фокусировки света, что повышает светочувствительность матрицы.
Наиболее популярным массивом цветных фильтров на фотоматрице является байеровский RGBGфильтр, построенный по цветовой модели Брайса Байера (Bryce Bayer) в начале 70х годов прошлого века компанией Kodak. Фильтры, построенные по принципу Байера (рис. 10), выглядят мозаичными с преобладанием зеленого цвета.
Фильтры, построенные по принципу Байера (рис. 10), выглядят мозаичными с преобладанием зеленого цвета.
Рис. 10. Фильтр Байера
Особенно важным здесь является наличие преобладающего цвета (не обязательно зеленого), который служит для обеспечения частоты дискретизации яркостного канала, превышающей частоту двух оставшихся цветовых. Подобный принцип реализован и в телевидении. Зеленый цвет выбран в качестве яркостного канала только потому, что кривая чувствительности глаза человека по яркости имеет максимум около 550 нм, что соответствует именно зеленому тону. Да и число рецепторов, чувствительных к зеленому цвету, на сетчатке глаза вдвое больше, чем тех, которые воспринимают красный или синий цвет.
Если взять элементарный байеровский квадрат 2Ѕ2, на котором один синий элемент, один красный и два зеленых (RGBG), то можно определить яркость по зеленому, а цвет пиксела (RGBзначение) получить в результате интерполяции — усреднения по нескольким близко расположенным ячейкам одного цвета. Изза того, что цвет итогового пиксела изображения размывается по нескольким соседним ячейкам, происходят потери в цветопередаче и в разрешении. Например, резкие контуры (цветовые переходы) размываются, мелкие детали (сравнимые по размеру с шириной интерполяции) теряются, а на изображении может появиться дефект, который называется Blooming (расплывание). Это становится возможным тогда, когда изображение имеет сильную локальную контрастность, то есть если светлый объект находится по соседству с темным. При увеличении этой области фотографии можно увидеть, что пикселы на их границах имеют очень странные цвета. Дело в том, что алгоритмы обработки изображения не могут разобраться в цвете на границе контрастных областей, ведь при интерполяции они переходят на соседнюю область, что дает неправильные яркость и тон.
Изза того, что цвет итогового пиксела изображения размывается по нескольким соседним ячейкам, происходят потери в цветопередаче и в разрешении. Например, резкие контуры (цветовые переходы) размываются, мелкие детали (сравнимые по размеру с шириной интерполяции) теряются, а на изображении может появиться дефект, который называется Blooming (расплывание). Это становится возможным тогда, когда изображение имеет сильную локальную контрастность, то есть если светлый объект находится по соседству с темным. При увеличении этой области фотографии можно увидеть, что пикселы на их границах имеют очень странные цвета. Дело в том, что алгоритмы обработки изображения не могут разобраться в цвете на границе контрастных областей, ведь при интерполяции они переходят на соседнюю область, что дает неправильные яркость и тон.
С ростом вычислительной мощности процессоров цифровых камер линейная интерполяция постепенно заменяется кубической, сплайновой и другими видами. Если алгоритм получения изображения настолько сложен, что его трудно реализовать в самом фотоаппарате, то его можно применить в программных RAWконверторах. Для этого после сохранения фотографии в RAWформате, когда изображение не подвергается обработке внутри камеры, в файл записываются данные, полученные напрямую с матрицы, а процесс интерполяции, повышения четкости, подавление шумов и другие операции со снимками выполняют на компьютере.
Для этого после сохранения фотографии в RAWформате, когда изображение не подвергается обработке внутри камеры, в файл записываются данные, полученные напрямую с матрицы, а процесс интерполяции, повышения четкости, подавление шумов и другие операции со снимками выполняют на компьютере.
В последние годы производители цифровых фотоаппаратов с целью повышения разрешения и улучшения цветопередачи пытаются модернизировать классический фильтр Байера. Например, фирма Sony предлагает использовать матрицы с четырехцветным RGBE (Emerald — изумрудный) фильтром. Применение такой технологии, по сравнению с классическими трехцветными фильтрами Байера, обеспечивает более естественную передачу цвета. Четырехцветный фильтр, в котором к привычным цветам RGB добавлен изумрудный (Emerald, E), позволяет наполовину уменьшить количество ошибок при конвертировании цвета и приблизить качество снимков к натуральной гамме цветов, воспринимаемой человеческим зрением.
Предлагается также (фирма Kodak) вместо классического фильтра Байера использовать в качестве четвертого, добавочного светочувствительного сенсора сенсор, не покрытый светофильтром (W).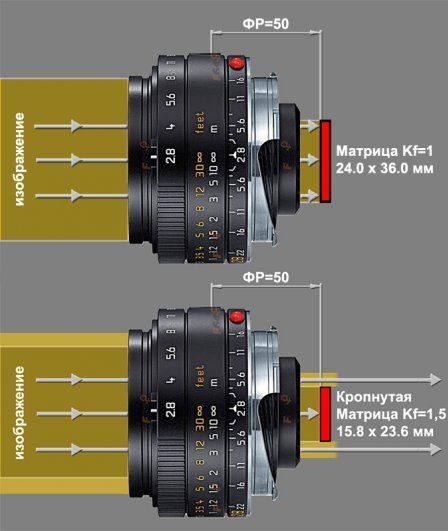 Данный тип сенсора чувствителен ко всем зонам видимого спектра, что позволяет сократить потерю светлоты в изображении. Вследствие этого RGBWфильтры, изготовленные по данной технологии, обладают лучшим, по сравнению с RGBфильтром, соотношением «сигнал/шум». Наличие Wсенсоров также приводит как к повышению монохроматической чувствительности матрицы, так и к улучшению разрешающей способности в условиях недостаточной освещенности, например при использовании осветительной аппаратуры с узким спектром излучения или при съемке в условиях вечернего либо ночного освещения, что вызвано увеличением актиничного потока излучения.
Данный тип сенсора чувствителен ко всем зонам видимого спектра, что позволяет сократить потерю светлоты в изображении. Вследствие этого RGBWфильтры, изготовленные по данной технологии, обладают лучшим, по сравнению с RGBфильтром, соотношением «сигнал/шум». Наличие Wсенсоров также приводит как к повышению монохроматической чувствительности матрицы, так и к улучшению разрешающей способности в условиях недостаточной освещенности, например при использовании осветительной аппаратуры с узким спектром излучения или при съемке в условиях вечернего либо ночного освещения, что вызвано увеличением актиничного потока излучения.
RGBWфильтр имеет свои недостатки: в режиме работы в нормальных световых условиях неизбежны потери мелких цветовых деталей. На сенсорах есть области 2Ѕ2 пиксела, состоящие только из W и Bсенсоров. В этих областях невозможно выделить цвет изображения по осям R и G. При совпадении же тонкой цветной линии с одним из выделенных направлений в матрице она может даже пропасть или стать пунктирной.
RGBWфильтры могут различаться между собой расположением в ячейке светочувствительных сенсоров. Однако такие альтернативные схемы не получили широкого распространения и сегодня в большинстве цифровых камер попрежнему применяются классические байеровские фильтры.
При использовании трехслойных фотоматриц Х3 (матрицы компании Foveon) цветоделение на основные цвета RGB проводится в толщине полупроводникового материала послойно, с применением физических свойств кремния, заключающихся в том, что с увеличением длины волны световых волн растет и глубина их проникновения в кремний (рис. 11а). Фотодиоды, созданные чередованием зон проникновения света, размещают один под другим на характерных глубинах для улавливания фотонов синего, зеленого и красного цветов.
Рис. 11. «Трехслойная» фотоматрица: а — принцип действия; б — структура фотоматрицы
Синяя часть спектра поглощается верхним слоем (толщина 0,2 мкм), зеленая — средним (толщина 0,4 мкм), а красная — нижним (более 2 мкм). Толщина каждого слоя выбрана по результатам экспериментальных исследований глубины проникновения квантов соответствующего спектрального диапазона в кремний. Слои, в которых происходит фотоэффект, разделены дополнительными тонкими зонами низколегированного кремния и имеют отдельные выводы сигнала.
Толщина каждого слоя выбрана по результатам экспериментальных исследований глубины проникновения квантов соответствующего спектрального диапазона в кремний. Слои, в которых происходит фотоэффект, разделены дополнительными тонкими зонами низколегированного кремния и имеют отдельные выводы сигнала.
Таким образом, получается датчик, регистрирующий информацию о всех трех цветовых компонентах изображения в одной точке, точно соответствующей координатам формируемого пиксела.
Благодаря малой (менее 5 мкм) толщине сенсора возможное влияние хроматических аберраций на изображение минимально. Однако, как и в других разновидностях матриц, поглощение красной части спектра происходит на максимальной глубине. В результате паразитной диффузии фотоэлектронов и засветки косыми лучами в области максимальных длин волн происходит дополнительное размытие изображения. Этот эффект затрудняет дальнейшее уменьшение размера элемента и повышение разрешения.
Достоинствами «трехслойных» фотоматриц является то, что они не требуют установки цветных фильтров и в связи с этим повышения соотношения «сигнал/шум», так как фильтры поглощают примерно 2/3 светового сигнала, а также потенциально более высокое разрешение.
Недостатками «трехслойных» фотоматриц следует считать невысокую точность цветопередачи, так как в наибольшей степени она определяется свойствами кремния, а также относительно высокий уровень цифрового шума изза того, что часть фотонов поглощается в «не своей» области.
Одной из важнейших характеристик фотоматриц является чувствительность — способность определенным образом реагировать на оптическое излучение, то есть генерировать электрический заряд. Чем выше чувствительность, тем меньшее количество света требуется для реакции фотоматриц при регистрации изображения. Чувствительность измеряется в единицах ISO (International Standards Organization — Международная организация стандартов). Различают интегральную и монохроматическую чувствительность.
Интегральная чувствительность представляет собой отношение величины фототока (в миллиамперах) к световому потоку (в люменах) от источника излучения, спектральный состав которого соответствует вольфрамовой лампе накаливания. Этот параметр позволяет оценить чувствительность сенсора в целом.
Этот параметр позволяет оценить чувствительность сенсора в целом.
Монохроматическая чувствительность есть отношение величины фототока (в миллиамперах) к величине световой энергии излучения (в миллиэлектронвольтах), соответствующей определенной длине волны. Набор всех значений монохроматической чувствительности для интересующей части спектра составляет спектральную чувствительность — зависимость чувствительности от длины волны света. Таким образом, спектральная чувствительность показывает возможности сенсора по регистрации оттенков определенного цвета.
В характеристиках цифрового фотоаппарата обычно приводят так называемую эквивалентную чувствительность ПЗСматрицы, указываемую в общепринятых единицах ISO в виде диапазона (ISO 100800) либо набора значений (ISO 50, 100, 200, 400). Вычисляется она каждым производителем посвоему, но в основу расчетов положена пара стандартных формул для определения экспозиционного числа (индекса).
Экспозиционный индекс EV выражает значение экспозиции в логарифмической шкале, которая удобна тем, что вместо перемножения коэффициентов можно просто складывать соответствующие индексы.
Экспозиционный индекс равен:
EV = S + N,
где S — индекс чувствительности фотоматрицы; N — индекс освещенности.
За N = 0 принята освещенность, при которой фотоматериал светочувствительностью 100 единиц ISO при экспонировании с относительным отверстием 1:1 и выдержкой 1 с получает корректную экспозицию.
Соотношение индекса чувствительности и единиц чувствительности ISO представлено в табл. 1.
Экспозиционный индекс может быть выражен через индекс А диафрагменного числа К объектива и индекс Т выдержки t:
EV = A + T.
В табл. 2 представлена зависимость экспозиционного индекса EV для различных комбинаций стандартных значений диафрагменного числа К и выдержки t. Любая комбинация выдержки и диафрагменного числа, если сумма их индексов, значения которых указаны соответственно в первом столбце (индекс выдержки Т) и первой строке таблицы (индекс диафрагменного числа А), одинакова и обеспечивает одинаковую экспозицию.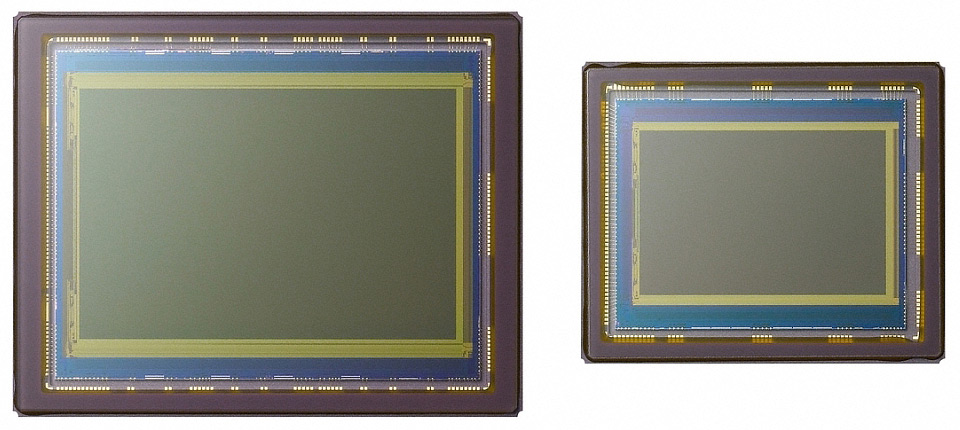
Цифровые фотоаппараты настраиваются на нужную для фотографирования экспозицию автоматически. При этом путем анализа индексов освещенности и чувствительности встроенный в цифровой фотоаппарат фотоэкспонометр достаточно точно определяет значение экспозиции, при которой объекты со средней отражательной способностью попадают в среднюю часть диапазона фотографической широты. В большинстве случаев автоматическая настройка параметров съемки (диафрагменное число, выдержка) оказывается корректной.
Таблица 1. Соотношение индекса чувствительности и единиц ISO
Единицы ISO |
3 |
6 |
12 |
25 |
50 |
100 |
200 |
400 |
800 |
1600 |
3200 |
Индекс чувствительности |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
В ситуациях, когда осуществляется фотографирование объектов с очень высокой или низкой отражательной способностью, возникает необходимость вводить в ручном режиме экспокоррекцию в автоматическую настройку экспозиции. Современные цифровые фотокамеры позволяют осуществлять экспокоррекцию в диапазоне ±2 EV ступенями в 1/3 EV или даже точнее.
Современные цифровые фотокамеры позволяют осуществлять экспокоррекцию в диапазоне ±2 EV ступенями в 1/3 EV или даже точнее.
Одним из параметров цифрового фотоаппарата является размер фотоматрицы, который складывается из размеров светочувствительных элементов и расстояния между ними. Больший размер матрицы при одинаковом разрешении позволяет иметь большие размеры светочувствительных ячеек, которые с большей площади могут накопить больший электрический заряд. Это позволяет получить высокую чувствительность и широкий динамический диапазон. При одинаковом количестве светочувствительных ячеек фотокамера с матрицей большего размера снимает более качественные изображения.
Матрицы цифровых фотоаппаратов принято характеризовать числом, указывающим на диагональ сенсора в долях дюйма (1/2,5, 1/1,8, 2/3 и т.д.). Данное число, именуемое формфактором, не соответствует реальной диагонали матрицы, составляющей примерно 2/3 от формфактора. Например, ПЗСматрица с формфактором 1/1,8 имеет диагональ 9 мм. Несовпадение это вызвано тем, что термин «формфактор», описывающий размер регистрирующего элемента, перекочевал в цифровую фотографию из телетехники. Размеры матриц даже одного формфактора, но разных производителей могут немного различаться.
Несовпадение это вызвано тем, что термин «формфактор», описывающий размер регистрирующего элемента, перекочевал в цифровую фотографию из телетехники. Размеры матриц даже одного формфактора, но разных производителей могут немного различаться.
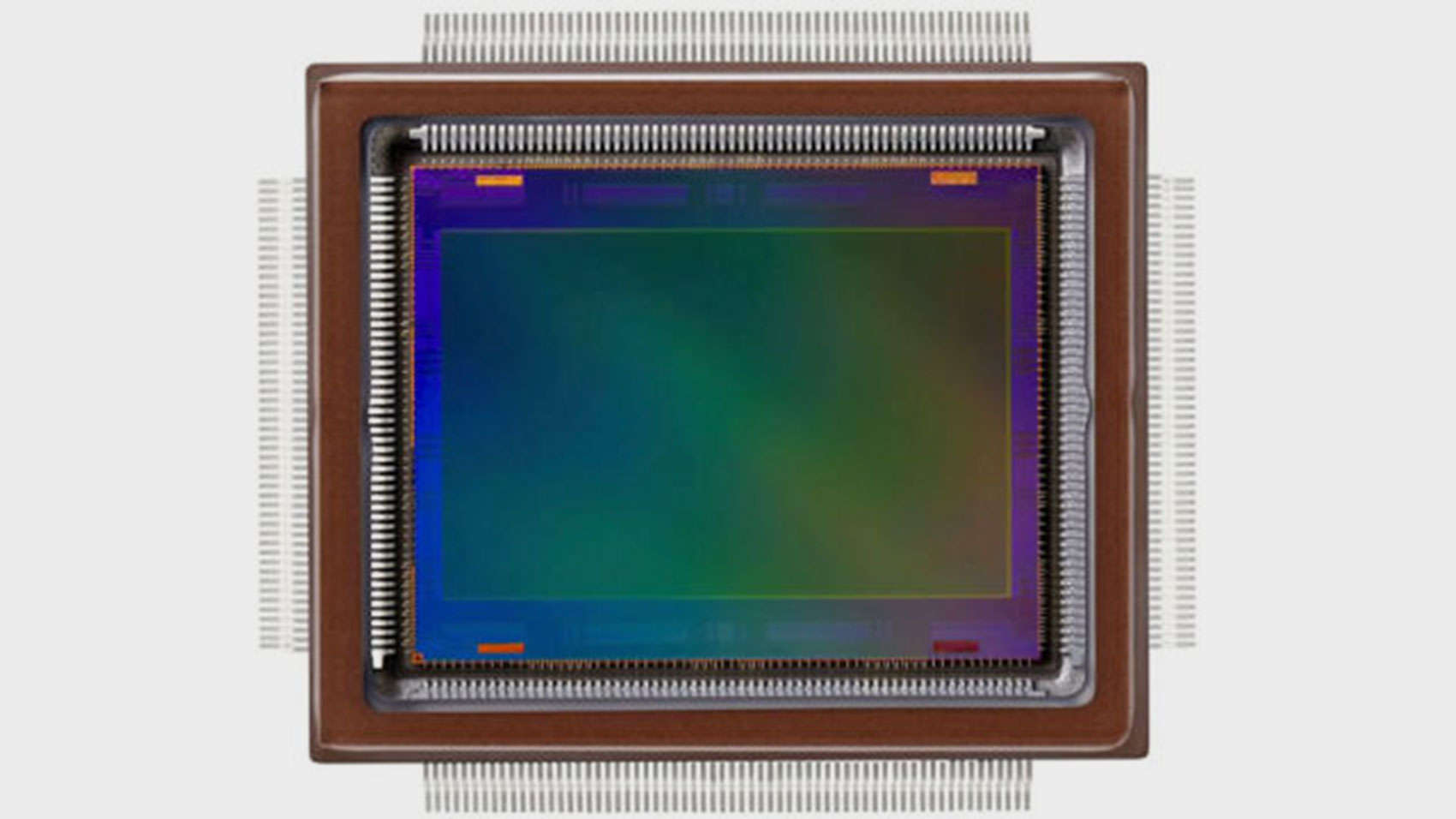
В пленочных фотоаппаратах применялась 35мм фотопленка с размером кадра 36Ѕ24 мм. В большинстве цифровых фотоаппаратов используются сенсоры меньшего размера. В очень дорогих зеркальных фотокамерах применяются полноформатные сенсоры, размер которых равен кадру 35мм пленки и даже еще больше. Например, известны цифровые фотокамеры с полноформатными сенсорами размером 48Ѕ36 мм и разрешением 28 и 33,3 Мпикс.
Процессор в цифровых фотоаппаратах управляет работой затвора, объективом, вспышкой, определяет экспозицию, формирует и выдает на дисплей информацию о выбранных режимах съемки, настройках, само изображение и т.д.
Рис. 12. Схема процесса оцифровывания изображения цифровым фотоаппаратом
На рис. 12 представлена схема процесса оцифровывания оптического изображения, сформированного объективом цифрового фотоаппарата на светочувствительных элементах фотоматрицы.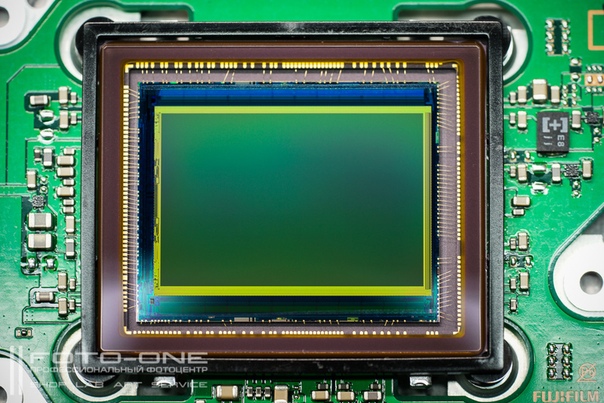
Светочувствительные элементы фотоматрицы фиксируют монохромное изображение, точнее величину яркости каждого пиксела, для трех основных цветов: красного, зеленого и синего.
Оцифрованные АЦП данные в процессоре преобразуются в изображение на основе внесенных производителем алгоритмов (программного обеспечения). Алгоритмы определяют координаты полученных от сенсора точек и присваивают им значения трех основных цветов (RGB), из которых формируются все возможные из воспроизводимых оттенки. Процессор учитывает цифровое значение уровней сигнала в трех каналах основных цветов соседних пикселов. Такая операция преобразования называется demosaic. Процессор также регулирует яркость, контрастность, насыщенность, резкость изображения, убирает шумы, при этом учитываются особенности человеческого зрения. В некоторых моделях применяется несколько процессоров, каждый из которых выполняет отдельные задачи. Процессор камеры преобразует поток данных в файл изображения в формате JPEG, TIFF или RAW. К этому файлу прикрепляются и метаданные фотографии (значение диафрагмы, выдержки, баланс белого, коррекция экспозиции, режим съемки и работы вспышки, чувствительность, фокусное расстояние, разрешение, модель камеры, версия программного обеспечения камеры, время, дата и т.д.).
К этому файлу прикрепляются и метаданные фотографии (значение диафрагмы, выдержки, баланс белого, коррекция экспозиции, режим съемки и работы вспышки, чувствительность, фокусное расстояние, разрешение, модель камеры, версия программного обеспечения камеры, время, дата и т.д.).
Таблица 2. Экспозиционная таблица
\ К t, с |
1,0 |
1,4 |
2,0 |
2,8 |
4,0 |
5,6 |
8,0 |
11 |
16 |
22 |
1 |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
1/2 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
1/4 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
1/8 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
1/15 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
1/30 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
1/60 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
1/125 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
1/250 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
1/500 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
При этом графический формат RAW, название которого в дословном переводе означает «сырой материал», представляет изображение в виде первичного необработанного цифрового оригинала. Массив данных в формате RAW содержит данные, зафиксированные (непосредственно) фотоматрицей и откорректированные в соответствии с калибровочной таблицей фотокамеры. В RAWфайл образ кадра записывается с разрядностью, с которой он был оцифрован АЦП камеры. Во многих современных моделях цифровых фотокамер используются 10 и 12разрядные АЦП, а следовательно, образ кадра в RAW записывается с более высокой разрядностью, нежели стандартный 8битовый JPEG или TIFF. Если файл не записывается в форматы RAW или TIFF, то он сжимается в соответствии с выбранным пользователем коэффициентом сжатия и алгоритмами работы программного обеспечения камеры. Алгоритмы сжатия в фотоаппарате стараются соблюсти баланс между размером файла, скоростью обработки и качеством изображения.
Массив данных в формате RAW содержит данные, зафиксированные (непосредственно) фотоматрицей и откорректированные в соответствии с калибровочной таблицей фотокамеры. В RAWфайл образ кадра записывается с разрядностью, с которой он был оцифрован АЦП камеры. Во многих современных моделях цифровых фотокамер используются 10 и 12разрядные АЦП, а следовательно, образ кадра в RAW записывается с более высокой разрядностью, нежели стандартный 8битовый JPEG или TIFF. Если файл не записывается в форматы RAW или TIFF, то он сжимается в соответствии с выбранным пользователем коэффициентом сжатия и алгоритмами работы программного обеспечения камеры. Алгоритмы сжатия в фотоаппарате стараются соблюсти баланс между размером файла, скоростью обработки и качеством изображения.
Наиболее экономичным из упомянутых форматов является JPEG. Типичный размер 4мегапиксельного JPEG, сохраненного с максимальным качеством, колеблется в пределах 1,82,5 Мбайт (в зависимости от конкретного сюжета разброс может быть и больше). Объем изображений, сохраненных в формате TIFF, для 4мегапиксельного снимка занимает почти 12 Мбайт, а 8мегапиксельный — 24. Объем файла формата JPEG (даже при установке минимальной степени компрессии) получается в 56 раз меньше аналогичного по разрешению TIFF. Файлы формата RAW содержат необработанные (или обработанные в минимальной степени) данные, что позволяет избежать потерь информации. В таких файлах находится полная информация об оцифрованном изображении, причем в несжатом виде. Поэтому файлы формата RAW имеют больший размер, чем файлы прочих форматов. После того как сформирован файл в какомлибо формате, изображение записывается либо на встроенную память, либо на съемную карту памяти.
Объем изображений, сохраненных в формате TIFF, для 4мегапиксельного снимка занимает почти 12 Мбайт, а 8мегапиксельный — 24. Объем файла формата JPEG (даже при установке минимальной степени компрессии) получается в 56 раз меньше аналогичного по разрешению TIFF. Файлы формата RAW содержат необработанные (или обработанные в минимальной степени) данные, что позволяет избежать потерь информации. В таких файлах находится полная информация об оцифрованном изображении, причем в несжатом виде. Поэтому файлы формата RAW имеют больший размер, чем файлы прочих форматов. После того как сформирован файл в какомлибо формате, изображение записывается либо на встроенную память, либо на съемную карту памяти.
КомпьюАрт 1’2012
Как проверить матрицу фотоаппарата — Чистка матриц фотоаппаратов, ремонт фотоаппаратов в СПб
Как проверить матрицу фотоаппарата
Чистка матрицы — это жизненная необходимость. Ниже приведены примеры грязных матриц, для тех у кого слабые нервы, болезни сердца, пожалуйста, прекратите читать эту статью.
Одним из недостатков современных цифровых зеркальных фотоаппаратов по сравнению с пленочными является то, что матрица камеры со временем становится грязной. В пленочных камерах для каждого снимка используется новый кусок пленки, так что с пылью вопросов не возникает
.Как проверить матрицу, если ли мусор или пятна на снимках?
Это не сложно. Нужно сделать снимок белого листа с закрытой диафрагмой. Самый простой способ сделать такой снимок, это:1. Поставить на камере режим приоритета диафрагмы, это Av или А на диске выбора режимов).
2. Установить минимальное значение диафрагмы, это означает, что число F должна быть максимальное, обычно это F16, F22, F32, F36.
3. Отключить авто ISO и установить его минимально возможное значение: обычно это ISO 50, 100, 200.
4. Затем отключите систему фокусировки, как правило это делается переключателем на объективе AF/M.
5. Фокусное расстояние объектива не влияет на «грязь», но что бы сильней размыть дефекты белого листа, особенно если лист не совсем чистый, можно поставить трансфокатор на максимальное приближение и немного поводить кругами в процессе экспонирования.

На фото выше, использованы следующие настройки ISO 100, F16, 50 мм. Для того, чтобы лучше увидеть загрязнения на матрице откройте снимок в программе редакторе, установите повышенную контрастность изображения. См. ниже.
Стрелками показана грязь, которая была на сенсоре, фотокамера не чистилась в течение года.Предупреждение: Иногда можно не боятся грязной матрицы. С диафрагмой открытой на F1.4-F4.0 мелкий мусор практически не влияет на качество изображения.
Проверка матрицы на битые пиксели.
Чтобы проверить матрицу на битые пиксели нужно:1. Выставить минимальное значение ISO,
2. Выдержку установить на 2-3 секунды.
3. Одеть крышку на объектив.
4. Затем сделать снимок.
Результатом будет черный кадр, лучше его рассмотреть на компьютере, но можно и на мониторе фотоаппарата. Для этого нужно увеличить снимок на мониторе фотоаппарата примерно в 3 раза и перемещать видимую область снимка по экрану стрелками или джойстиком управления на корпусе фотоаппарата. Если на черном фоне видны белые или цветные точки, значит матрица фотоаппарата имеет битые пиксели.
Если на черном фоне видны белые или цветные точки, значит матрица фотоаппарата имеет битые пиксели.
Битые пиксели проявляются не зависимо от выдержки.
Ещё бывают горячие пиксели.
Они видны при проверке по той же схеме, но только при выставлении высокой ISO. Поставьте ISO от 1600 до 6400.
Горячие пиксели в отличии от битых сильнее проявляются при длительных выдержках и/или высоком ISO.
В принципе это рабочие пиксели матрицы, но неисправность их проявляется в случае прогрева матрицы, к примеру на большом ISO. Горячие пиксели встречаются на большинстве матриц, вопрос только в их количестве.
Проверка инфракрасного фильтра матрицы на царапины.
Инструкция та же что и при проверке на грязь на матрице:1. Поставить камеру в режим приоритета диафрагмы (Av на диске выбора режимов).
2. Установите минимально допустимое значение диафрагмы, которое означает, что число F должна быть максимальное, чаще всего это F16, F22, F32, F36.

3. Отключить автоматическое ISO и установить его минимально возможное значение: обычно это ISO 100, ISO 200.
4. Затем отключите систему фокусировки, как правило это делается переключателем на объективе AF/M.
Можно добавить к этому лишь то, что царапину обычно можно увидеть и просто посмотрев на фильтр закрывающий матрицу. Для этого нужно найти в меню фотоаппарата режим ручной очистки матрицы или «поднять зеркало для очистки матрицы», либо на ручной выдержке bulp и визуально оценить состояние фильтра матрицы.
Как чистить и обслуживать фотоаппарат и объективы
На снятом камерой изображении присутствуют пятна или пыльОдна из самых распространенных проблем, с которой сталкиваются фотографы, — пыль на матрице камеры.
Она может оказать неблагоприятное воздействие на фотографии, поскольку видна в светлых частях изображения в виде размытых темных пятен. В большинстве случаев пыль видна на фоне голубого неба, как показано ниже.Иногда ошибочно полагают, что пятна, появляющиеся на фотографиях, вызваны пылью на полупрозрачном зеркале, электронном видоискателе или объективе. Однако пыль на зеркале и электронном видоискателе не влияет на окончательный вид фотографии. Равным образом и пылинки на объективе слишком малы и далеки от фокуса, чтобы быть видимыми на снимках.
Однако пыль на зеркале и электронном видоискателе не влияет на окончательный вид фотографии. Равным образом и пылинки на объективе слишком малы и далеки от фокуса, чтобы быть видимыми на снимках.Какие меры предосторожности следует предпринять, чтобы избежать попадания пыли на матрицу и полупрозрачное зеркало?
Полностью избежать попадания пыли в камеру нельзя, но значительно снизить ее количество можно с помощью следующих мер.
- Выключайте камеру перед сменой объектива. Это снизит статический заряд на матрице и понизит риск притяжения пыли.
- Прежде чем устанавливать объектив на камеру, убедитесь, что его задняя часть чистая и не запылена. Сдувайте с объектива пыль и в особенности другие частицы, способные поцарапать стекло, пневмощеткой. После этого при необходимости используйте сухую ткань из микроволокна.
- Не оставляйте камеру без объектива на продолжительное время. При снятии объектива сразу же устанавливайте на камеру крышку или другой объектив.
- По возможности меняйте объективы только в сухих условиях, при отсутствии пыли и песка.
- При смене объектива держите камеру байонетом вниз, чтобы избежать попадания в нее пыли.
- Сохраняйте заднюю крышку объектива и крышку байонета камеры в чистоте. Не допускайте накопления на них пыли. При установке объектива на камеру заднюю крышку объектива можно прикрепить к крышке байонета камеры. Это предотвратит накопление на них пыли и грязи, особенно если они будут храниться в сумке для камеры.
- Поддерживайте сумку для камеры в чистоте. В процессе эксплуатации сумка собирает на себя много пыли и грязи. Время от времени извлекайте из сумки все содержимое и чистите ее пылесосом. Перед использованием пылесоса извлекайте из сумки все мелкие детали — карты памяти, крышечку горячего башмака и т. д.

Что можно сделать, если на снимках есть пятна от пыли?
В камерах SLT имеется двухэтапная функция очистки Anti Dust.
- Антистатическое покрытие оптического низкочастотного фильтра.
- Вибрация матрицы для стряхивания легких пылинок, попавших на низкочастотный фильтр. (В моделях SLT, появившихся летом 2011 г. (SLT-A77 и последующие модели), используется более эффективная в сравнении с предыдущими моделями ультразвуковая вибрация.)

Вибрация матрицы включается автоматически при каждом выключении камеры, а при необходимости может быть включена в меню. Поскольку встроенная функция Anti Dust срабатывает при каждом выключении камеры, пыль, видимая на предыдущих фотографиях, могла быть уже удалена с матрицы. Кроме того, обычные пылинки достаточно малы и незаметны невооруженным глазом на матрице.
Как очищать матрицу (в частности оптический низкочастотный фильтр перед ней)?
Sony допускает только один способ самостоятельной очистки — с помощью потока воздуха из ручной резиновой груши (пневмощетки)*. Все прочие методы могут повредить матрицу, в частности оптический низкочастотный фильтр перед ней, и аннулировать гарантию на камеру.
Для очистки низкочастотного фильтра перед матрицей выполните следующее:
- Выключите камеру, чтобы автоматически сработала функция вибрации матрицы. Слабо держащаяся пыль будет сброшена.
- Снимите объектив. Вы увидите полупрозрачное зеркало, закрывающее матрицу. С помощью резиновой груши аккуратно сдуйте пыль с полупрозрачного зеркала, но не касайтесь зеркала кончиком груши.
- Для доступа к матрице зеркало необходимо откинуть. Аккуратно нажмите на фиксирующий рычаг зеркала пальцем, чтобы откинуть его.
Не касайтесь поверхности полупрозрачного зеркала! Зеркало камеры изготовлено из полупрозрачной пленки. Касание может запачкать или деформировать его, что скажется на качестве изображения и работе камеры. - Поверните камеру байонетом вниз, направьте кончик груши внутрь камеры и подуйте из груши несколько раз. Большая часть пылинок будет сдута с матрицы и выброшена из камеры потоком воздуха.
- После этого нажатием пальца верните зеркало в нормальное положение. Вы должны услышать щелчок. Как и выше, касайтесь только оправы зеркала, но не его поверхности.
 Слабо держащаяся пыль будет сброшена.
Слабо держащаяся пыль будет сброшена.* Ручная резиновая груша/пневмощетка.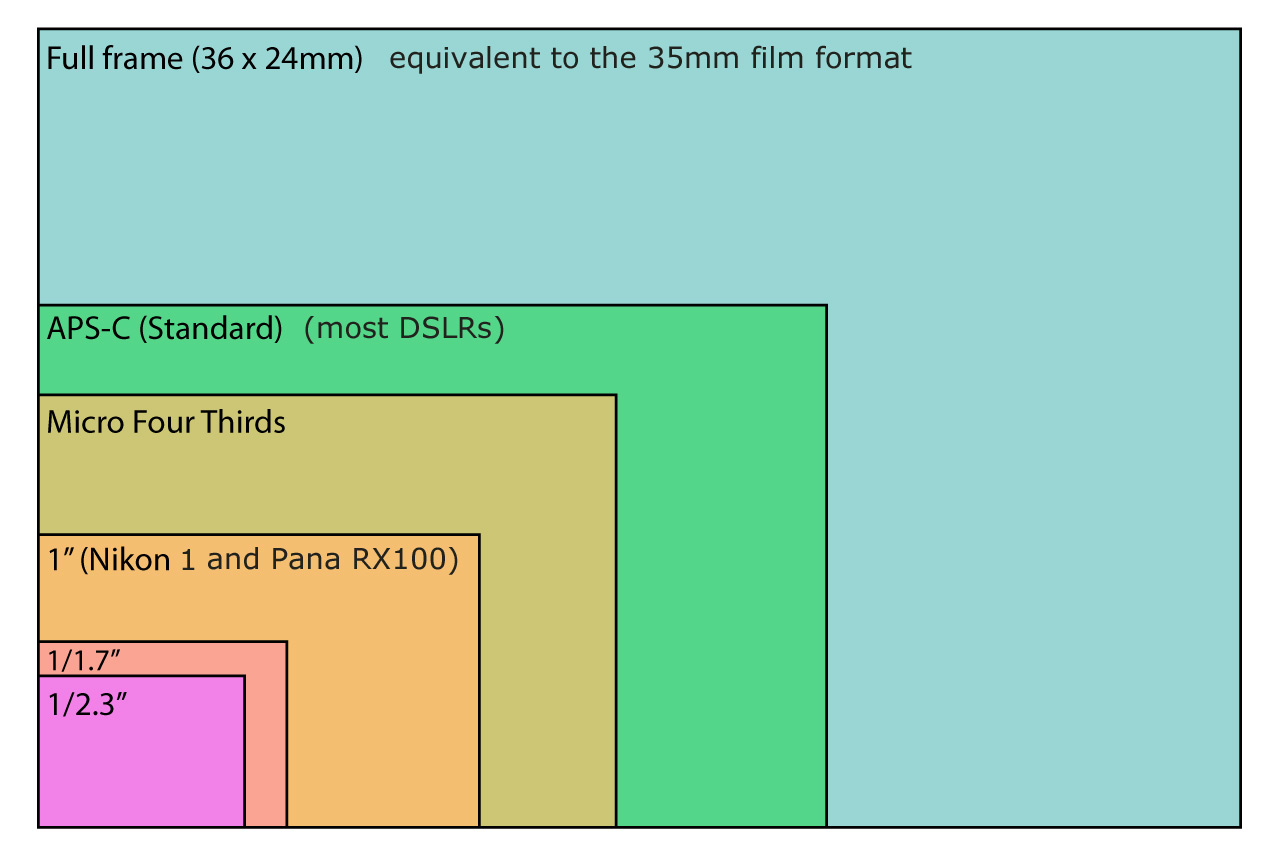 Пневмощетки выпускаются многими производителями и значительно различаются по цене и качеству. Качественные пневмощетки оснащены сменными воздушными фильтрами для предотвращения задувания в камеру новой пыли. Резиновая пневмощетка — важный аксессуар в наборе фотографа, позволяющий в большинстве случаев быстро и действенно избавиться от пыли.
Пневмощетки выпускаются многими производителями и значительно различаются по цене и качеству. Качественные пневмощетки оснащены сменными воздушными фильтрами для предотвращения задувания в камеру новой пыли. Резиновая пневмощетка — важный аксессуар в наборе фотографа, позволяющий в большинстве случаев быстро и действенно избавиться от пыли.
Примечание. Не используйте для очистки матрицы сжатый воздух! При слишком высоком давлении он может повредить матрицу или занести в камеру капли агрессивных жидкостей, способных серьезно повредить низкочастотный фильтр или полупрозрачное зеркало.
Пыль на полупрозрачном зеркале
Полупрозрачное зеркало — очень чувствительная деталь камеры.
Зеркало камеры изготовлено из полупрозрачной пленки. Касание может запачкать или деформировать его, что скажется на качестве изображения и работе камеры. Кроме того, полупрозрачную пленку легко поцарапать.
Не пытайтесь стирать грязь, пыль и жир с зеркала камер SLT и не используйте чистящие жидкости. Это повредит полупрозрачное зеркало. Повреждения, вызванные непосредственным контактом с полупрозрачной пленкой, не покрываются гарантией.
Это повредит полупрозрачное зеркало. Повреждения, вызванные непосредственным контактом с полупрозрачной пленкой, не покрываются гарантией.
Для очистки зеркала камер SLT и обеспечения оптимальной функциональности регулярно используйте резиновую пневмощетку* во избежание накопления пыли. Также очищайте внешнюю сторону задней части объектива перед его установкой на камеру. Это особенно важно при использовании камеры в среде с высокой влажностью или опасностью образования конденсата. В условиях высокой влажности имеющаяся на зеркале камеры SLT пыль может приклеиться к нему.
* Ручная резиновая груша/пневмощетка. Пневмощетки выпускаются многими производителями и значительно различаются по цене и качеству. Качественные пневмощетки оснащены сменными воздушными фильтрами для предотвращения задувания в камеру новой пыли. Резиновая пневмощетка — важный аксессуар в наборе фотографа, позволяющий в большинстве случаев быстро и действенно избавиться от пыли.
Примечание. Не используйте сжатый воздух! При слишком высоком давлении он может повредить матрицу или занести в камеру капли агрессивных жидкостей, способных серьезно повредить полупрозрачное зеркало.
Пыль внутри объектива
Пыль внутри объектива — это нормальное явление, и оно не должно вызывать беспокойства. В сравнении с пылью на матрице пыль внутри объектива практически не сказывается на снимках. Таким образом, если вы заметили пыль внутри объектива (ее легче заметить невооруженным глазом, чем пыль на матрице), вы можете продолжать снимать.
Попадание воздуха в объективы предусмотрено конструкцией, поскольку они содержат элементы, движущиеся при фокусировке и трансфокации. Если бы конструкция была герметичной, линзам мешало бы сдвигаться и раздвигаться давление воздуха.
Даже в новом объективе может содержаться небольшое количество пыли. Это не является дефектом. Хотя объективы изготавливаются в очень чистой среде, изолировать ее полностью от пыли невозможно.
Как чистить и обслуживать камеру и объективы
Необходимо производить очистку камеры и объективов, чтобы поддерживать технику в хорошем состоянии, однако это весьма деликатная процедура. Вот почему важно содержать их в хорошем состоянии и беречь от загрязнений.
Вот почему важно содержать их в хорошем состоянии и беречь от загрязнений.
Всегда надевайте крышки объективов.
Храните объективы в защитных чехлах.
Храните фотоаппаратуру в подходящей сумке.
Необходимые принадлежности можно найти здесь.
Если вы находитесь в очень влажном месте или переходите из холода в тепло, может произойти конденсация влаги. Конденсация может привести к окислению некоторых металлических деталей внутри камеры, что вызовет ее поломку. Кроме того, в камере может появиться грибок и плесень, что приведет к повреждению оборудования. Чтобы уменьшить этот риск, рекомендуется положить в футляр для переноски фототехники мешочки с силикагелем. Силикагель абсорбирует часть влаги.
При работе с оборудованием в камеру и на объективы может попасть пыль и другие твердые частицы; кроме того, на них могут появиться отпечатки пальцев. См. ниже, как удалить их, не повредив технику.
- Камера
После дня, проведенного на пляже, в щели на корпусе камеры могут попасть песчинки.
Если не удалить их сразу, они могут проникнуть в регулировочные диски, что приведет к преждевременному износу деталей камеры и сделает ее непригодной для использования. Эти песчинки могут также серьезно повредить фокусировочные кольца объективов.
Простейший способ удалить песчинки — почистить внешнюю часть корпуса камеры мягкой кисточкой. Не нажимайте на кисточку, чтобы не поцарапать корпус или ЖК-экран.
Если липкая пыль не удаляется кисточкой, можно воспользоваться ватным валиком. Для очистки труднодоступных мест часто бывает эффективна резиновая груша.
Если все это не помогло удалить загрязнения (грязь и т. п.) с корпуса камеры, с ними прекрасно справится ткань из микроволокна (которую можно купить в магазине оптики), слегка смоченная водой. Мы рекомендуем микроволокно, потому что оно не поцарапает ЖК-экран.
Не используйте химические вещества — разбавители, бензин, спирт, одноразовые чистящие салфетки и т. д.
- Объективы
Объективы следует чистить особенно осторожно. Стекло, из которого сделаны линзы, очень хрупкое и легко царапается. Объективы следует чистить только в крайнем случае. При каждой очистке ухудшаются свойства оптической поверхности. Следы остаются всегда, даже если они не видны невооруженным глазом. Лучше иметь немного пыльный объектив, чем поцарапанный.
На наш взгляд, чистка необходима, если вы заметили отпечатки пальцев. По своей природе они жирные и кислые и могут повредить антибликовое покрытие линз. Высохшие водяные капли и брызги морской воды содержат кристаллики соли, которые также могут повредить стекло, поэтому их тоже необходимо удалять.
 Если не удалить их сразу, они могут проникнуть в регулировочные диски, что приведет к преждевременному износу деталей камеры и сделает ее непригодной для использования. Эти песчинки могут также серьезно повредить фокусировочные кольца объективов.
Если не удалить их сразу, они могут проникнуть в регулировочные диски, что приведет к преждевременному износу деталей камеры и сделает ее непригодной для использования. Эти песчинки могут также серьезно повредить фокусировочные кольца объективов. д.
д.
Удаление пыли и других микрочастиц
Сначала с помощью резиновой груши удалите большую часть пыли. Ни в коем случае не продувайте объективы ртом. Это приведет к попаданию на объектив капелек слюны, которые оставляют трудноудаляемые следы.
Затем с помощью очень мягкой кисточки удалите пыль с объектива. Не трогайте волоски кисточки пальцами, иначе они станут жирными и будут оставлять мазки. Не давите слишком сильно. К примеру, после дня, проведенного на пляже, на линзах объектива могут остаться микрочастицы кварца и кремнезема, и неправильная чистка приведет к тому, что оптические поверхности будут поцарапаны.
Не трогайте волоски кисточки пальцами, иначе они станут жирными и будут оставлять мазки. Не давите слишком сильно. К примеру, после дня, проведенного на пляже, на линзах объектива могут остаться микрочастицы кварца и кремнезема, и неправильная чистка приведет к тому, что оптические поверхности будут поцарапаны.
Удаление жирных потеков и отпечатков пальцев
Общее правило: не прикасайтесь пальцами к линзам. Если на линзах появились отпечатки пальцев, никогда не удаляйте их с помощью одежды или салфетки. Их волокна слишком грубые и могут поцарапать линзу.
Используйте ткань из микроволокна и храните ее в сумке или футляре для переноски фототехники, чтобы на нее не попадала пыль.
Если для удаления жирных потеков необходимо использовать жидкость, не пользуйтесь водопроводной водой, содержащиеся в ней соли могут поцарапать линзу.
Смочите тряпку из микроволокна деионизированной водой и без втирания легко протрите поверхность линзы.
Блог
На сегодняшний день у каждого человека есть при себе камера в телефоне, которая дает возможность делать неплохие снимки. Однако, такая камера подойдет не под все запросы, например, при съемке на важном мероприятии или в путешествии. Для этого и существуют полноценные фотоаппараты, которые способны справиться с любой задачей как новичку, так и профессионалу.
Однако, такая камера подойдет не под все запросы, например, при съемке на важном мероприятии или в путешествии. Для этого и существуют полноценные фотоаппараты, которые способны справиться с любой задачей как новичку, так и профессионалу.
Так как производители предлагают огромное количество разнообразных фотоаппаратов, при выборе подходящей модели могут возникнуть трудности. В этой статье мы разберем, какие типы фотоаппаратов бывают и на какие характеристики обратить внимание, чтобы выбрать хороший фотоаппарат.
Типы фотоаппаратов. Какой выбрать?Перед тем как перейти к характеристикам, стоит определиться, какой тип фотоаппарата вам нужен, их существует несколько: компактные, зеркальные и беззеркальные.
Компактные фотоаппараты
Данный тип отлично подойдет для новичков, а также для тех, кто планирует снимать себя, родственников или друзей. Они не занимают много места и их легко взять с собой в путешествие. Для удобства пользователей, такие фотоаппараты зачастую обладают несколькими режимами съемки без возможности ручной настройки.
Для удобства пользователей, такие фотоаппараты зачастую обладают несколькими режимами съемки без возможности ручной настройки.
К плюсам компактных фотоаппаратов можно отнести их небольшую стоимость, расцветки всех доступных цветов и небольшие размеры.
Зеркальные фотоаппаратыРанее такие фотоаппараты были только у профессиональных фотографов, которые разбирались во всех тонкостях настройки и могли сделать отличные снимки. На сегодняшний день зеркальные фотоаппараты сделали немного проще и добавили несколько автоматических режимов, что позволило обычным пользователям использовать их и получать качественные снимки. Однако, если вы не занимаетесь профессиональной съемкой, то такой фотоаппарат не стоит брать с собой на долгие мероприятия или походы, так как он занимает много места и имеет приличный вес. Вы просто устанете носить его с собой.
Беззеркальные фотоаппараты
Беззеркальные фотоаппараты представляют собой цифровое устройство, с возможностью смены объектива. Такой тип подойдет как новичку, так и профессионалу. Фотоаппарат не занимает много места и имеет достаточно легкий корпус, что позволяет с легкостью брать его с собой на любое мероприятие. Цена данного фотоаппарата зависит от его комплектации. В магазине вы можете встретить как отдельную камеру — Body, или как ее прозвали в народе — “тушка”, так и камеру в комплекте с объективом — Kit. Нечасто, но все же возможно, в продаже встречаются камеры с двумя объективами в комплекте — DoubleKit, стоимость такой техники будет намного дороже.
Такой тип подойдет как новичку, так и профессионалу. Фотоаппарат не занимает много места и имеет достаточно легкий корпус, что позволяет с легкостью брать его с собой на любое мероприятие. Цена данного фотоаппарата зависит от его комплектации. В магазине вы можете встретить как отдельную камеру — Body, или как ее прозвали в народе — “тушка”, так и камеру в комплекте с объективом — Kit. Нечасто, но все же возможно, в продаже встречаются камеры с двумя объективами в комплекте — DoubleKit, стоимость такой техники будет намного дороже.
Итак, после того, как вы выбрали тип фотоаппарата, пришло время разобраться в характеристиках, на которые вам нужно обратить внимание.
Матрица и количество пикселей
Матрица это первое, на что стоит смотреть в первую очередь. В зависимости от типа фотоаппарата матрица может иметь разные размеры. Так, в компактных фотоаппаратах чаще всего установлена матрица размером 1/2. 3, иногда могут встретиться варианты и с большим размером, но он будет недалек от указанного ранее. Зеркальные и беззеркальные фотоаппараты обладают большим размером матрицы — от 1 до полного кадра, размер которого составляет 36х24 мм. Чем больше размер матрицы, тем лучше снимок вы получите. Однако, матрица большого размера имеет один недостаток — она превращает фотоаппарат в большое устройство.
3, иногда могут встретиться варианты и с большим размером, но он будет недалек от указанного ранее. Зеркальные и беззеркальные фотоаппараты обладают большим размером матрицы — от 1 до полного кадра, размер которого составляет 36х24 мм. Чем больше размер матрицы, тем лучше снимок вы получите. Однако, матрица большого размера имеет один недостаток — она превращает фотоаппарат в большое устройство.
Выбор количества мегапикселей стоит на втором месте, так как здесь стоит опираться на размер матрицы. Если последняя имеет маленькие размеры, а количество указанных мегапикселей велико, то изображения не будут получаться такими, какими вы их задумали.
Кроп-фактор
Так как производство фотоаппаратов с полной матрицей дело затратное и покупатели на такую технику находятся нечасто, то производители нашли выход из данной ситуации обрезав матрицу. Кроп-фактор — это обозначение, которое показывает, насколько от первоначального размера была обрезана матрица. Чем меньше этот показатель, тем лучше будет качество ваших снимков.
Чем меньше этот показатель, тем лучше будет качество ваших снимков.
С помощью стабилизации можно избежать смазанных кадров, которые возникают из-за дрожания руки. Существует два вида стабилизаторов в фотоаппарате: оптический и цифровой. Последний компенсирует изображение с помощью системы и делает его более плавным. Однако, если вы хотите получить отличное изображение без недочетов, то стоит отдать предпочтение оптическому стабилизатору. Также, возможны варианты камер с двумя типами стабилизации.
Светочувствительность
Эта характеристика отражается как ISO и при высоких ее значениях становится возможным снимать в темное время суток. Однако, чем выше вы поставите данный показатель, тем больше “шумов” появится на изображении. В основном, для того, чтобы делать хорошие снимки достаточно установить ISO на отметке от 400 до 800. Если же вы любите эксперименты, то ищите камеру с гибкими настройками этого параметра.
Это также немаловажная часть фотоаппарата, так как именно она позволяет увидеть получившееся фото сразу. В зависимости от ваших потребностей, вы можете выбрать как экран с сенсорным управлением, так и без него. Первый вариант дает намного больше возможностей для настройки. Также, современные производители оснащают фотоаппараты поворотным экраном, что очень удобно при съемке самого себя или фотографии с друзьями.
ВспышкаВ компактных фотоаппаратах всегда присутствует встроенная вспышка, которая способна удовлетворить все потребности владельца. При этом, наличие вспышки в зеркальных и беззеркальных фотоаппаратах необязательно, а иногда и нежелательно вовсе. Причиной тому является то, что при встроенной вспышке можно испортить хороший кадр, так как она даст на фотографии резкие тени. Для тех, кто заботится о чистоте кадра, лучше приобретать отдельную вспышку.
Зум
Зум также бывает оптический и цифровой. Если у вас стоит такой выбор, то отдать предпочтение стоит фотоаппарату с оптическим зумом, так как именно с ним у вас получатся приближенные снимки без искажений. Цифровой зум подойдет только для съемок с небольшого расстояния, так как увеличение изображения в данном случае происходит за счет растяжения центра, что искажает линии.
Если у вас стоит такой выбор, то отдать предпочтение стоит фотоаппарату с оптическим зумом, так как именно с ним у вас получатся приближенные снимки без искажений. Цифровой зум подойдет только для съемок с небольшого расстояния, так как увеличение изображения в данном случае происходит за счет растяжения центра, что искажает линии.
Таким образом, для того, чтобы выбрать хороший фотоаппарат, который будет выполнять все необходимые вам функции, необходимо определиться с типом желаемой техники и с основными техническими характеристиками.
Как устроена матрица фотокамеры
ПрактикаМир технологий
Андрей Виноградов | 28.05.2014 Откуда берется цвет
Какие есть типы матриц
Сколько мегапикселей достаточно
Светочувствительные матрицы используются во многих устройствах. Самое известное из них – фотокамера. Цифровые сенсоры заменили собой пленку, сделав съемку существенно проще и дешевле, открыв
для масс возможность делать тысячи снимков, платя лишь раз – при покупке фотоаппарата.
Откуда берется цвет
Матрица фотоаппарата весьма непростое устройство, хотя на первый взгляд представляет собой просто ряды светочувствительных фотодиодов. Ее основная задача заключается в преобразовании полученных
импульсов в электрический ток. Причем сделать это нужно так, чтобы в итоге получилось цветное изображение с высокой детализацией.
Когда фотографы спорят о том, матрица чьего фотоаппарата более точно и глубоко передает цвет, они даже не задумываются, что каждый из пикселей – монохромный. Цвет появляется благодаря хитрым системам. Таким, как мозаичные фильтры. Это самая распространенная технология получения цветного изображения.
Матрица накрыта тончайшим фильтром, который делит сенсор на субпиксели. Каждому из них присваивается свой цвет, в дальнейшем таким образом формируется общая картинка. Существует целый ряд подтипов,
наиболее известным из которых является фильтр Байера, названный в честь сотрудника компании Kodak, доктора Брайса Э.![]() Байера (Bryce Bayer), создавшего эту технологию в 1976 году.
Байера (Bryce Bayer), создавшего эту технологию в 1976 году.
Данный светофильтр делит каждый пиксель на два зеленых, красный и синий субпиксели. Таким образом изображение делится на точки, но метод не лишен недостатков. Главный из них – потеря четкости, так
как недостающую информацию приходится интерполировать, то есть вычислять, дорисовывать. Тем не менее сегодня проблема потеряла остроту, поскольку пиксели стали настолько маленькими, что увидеть
потерю резкости крайне сложно.
Впрочем, существуют и альтернативные системы получения цветного изображения. Например, матрица Foveon, которую использует в своих фотокамерах компания Sigma. Foveon X3 по сути состоит из трех матриц (не путать с трехматричными системами 3CCD!), расположенных друг над другом, но не пропускает свет определенного спектра.
Поэтому нет необходимости применять интерполяцию – то, что попало на матрицу, записывается в файл. Но и эта система не идеальна: главным образом Foveon X3 страдает из-за высоких шумов. Дело в том,
что идеально распределить получаемый свет по слоям крайне непросто, и некоторая часть света поглощается «чужим» слоем. Разумеется, изображение от этого не улучшается.
Дело в том,
что идеально распределить получаемый свет по слоям крайне непросто, и некоторая часть света поглощается «чужим» слоем. Разумеется, изображение от этого не улучшается.
Система 3CCD используется в видеокамерах, скажу о ней кратко – специальная призма делит свет на три составляющие и каждая матрица формирует свое изображение, объединяющееся в одно силами процессора.
Какие есть типы матриц
Существует два основных типа: ПЗС (прибор с зарядовой связью – Charge-Coupled Device, CCD) и КМОП (комплементарная структура «металл-оксид-полупроводник» – Complementary Metal-Oxide-Semiconductor,
CMOS). Вдаваться в технические подробности я не стану – принципиальная разница заключается в методе снятия заряда со светочувствительного элемента сенсора. На тематических форумах можно прочесть не
одну сотню страниц, написанных пользователями, которые пытаются доказать, что ПЗС лучше КМОП и наоборот. Если же взглянуть на механизм формирования изображения, становится ясно, что на
цветопередачу влияют многие параметры и способ передачи электрического сигнала от пикселя к процессору – далеко не главный. Вы наверняка замечали, что разные модели фотокамер имеют свою фирменную
цветопередачу и даже уровень шумов. При этом производителей матриц немного. Безусловным лидером считается компания Sony, чьи матрицы используют также Nikon и Pentax. Взгляните на необработанные
JPEG от Pentax K10D, Nikon D80 и Sony A100. Характерные особенности картинки хорошо видны, несмотря на то, что во всех трех стоит один и тот же ПЗС-сенсор разрешением 10 Мп.
Вы наверняка замечали, что разные модели фотокамер имеют свою фирменную
цветопередачу и даже уровень шумов. При этом производителей матриц немного. Безусловным лидером считается компания Sony, чьи матрицы используют также Nikon и Pentax. Взгляните на необработанные
JPEG от Pentax K10D, Nikon D80 и Sony A100. Характерные особенности картинки хорошо видны, несмотря на то, что во всех трех стоит один и тот же ПЗС-сенсор разрешением 10 Мп.
Да что там разные производители! Во времена сотрудничества Samsung и Pentax разница в изображении «клонов» была весьма значительной. Изображения, формируемые на 14-Мп матрице корейского
производства более грамотно формировались в «родном» Samsung GX-20, нежели в Pentax K20D, поэтому и цветопередача была точнее, и шумы меньшими. Все это доказывает: гораздо важнее правильно
обработать сигнал.
Последним доводом в пользу того, что ПЗС «круче» КМОП является то, что средний формат до последнего времени использовал только матрицы первого типа. Но это происходило скорее из-за того, что данный
рынок развивается медленнее, ведь спрос на дорогущие и не универсальные среднеформатные камеры не исчисляется миллионами. А в нынешнем году КМОП пришел и в высший сегмент – именно эти матрицы
установлены в Pentax 645Z, а также в цифровом заднике Phase One IQ250.
Но это происходило скорее из-за того, что данный
рынок развивается медленнее, ведь спрос на дорогущие и не универсальные среднеформатные камеры не исчисляется миллионами. А в нынешнем году КМОП пришел и в высший сегмент – именно эти матрицы
установлены в Pentax 645Z, а также в цифровом заднике Phase One IQ250.
Сколько мегапикселей достаточно
Чем больше – тем лучше. В идеале, конечно. Ведь каждый пиксель – это дополнительная информация, которая повышает резкость, а в конечном итоге и детализацию. Но не все так просто.
Прежде всего, хочу разочаровать всех жаждущих заполучить фотокамеру с условными тремя мегапикселями и рабочими ISO 102400. Дело ведь не в том, что производители не хотят считаться с энтузиастами,
которым не нужно сверхвысокое разрешение при отсутствии шумов. Такую матрицу сделать даже с современными технологиями непросто.
 Не верите? Хорошо, давайте рассмотрим вопрос во времени. Загляните на тематический форум, и вы найдете
не один десяток сообщений, что, мол, новая 24-Мп камера – это уже слишком, вот есть же матрица с 14 Мп – на ней пиксели «жирные», а значит, лучше! Открываешь темы трех-пятилетней давности, где
говорят: «Эх, наделали целых 14 Мп, куда столько? Лучше бы сделали новую 10-Мп, но с меньшими шумами». Восемь лет назад та же история наблюдалась при переходе от 6 Мп к 10 Мп. К чему это я? К тому,
что, несмотря на рост разрешения, раньше камерой с матрицей формфактора APS-C можно было снимать на ISO 200–400, сегодня же я без опаски могу выставить и ISO 1600, а иногда и 3200. При этом следует
учитывать, что, если снизить разрешение кадра с 24 до 6 Мп, шумы тоже снизятся, даже без применения дополнительных алгоритмов. Если добавить к этому возможность вырезать фрагменты кадра (если
позволяет оптика) в значительно большей степени, нежели при низком разрешении, действительно получается, что чем больше пикселей, тем лучше.
Не верите? Хорошо, давайте рассмотрим вопрос во времени. Загляните на тематический форум, и вы найдете
не один десяток сообщений, что, мол, новая 24-Мп камера – это уже слишком, вот есть же матрица с 14 Мп – на ней пиксели «жирные», а значит, лучше! Открываешь темы трех-пятилетней давности, где
говорят: «Эх, наделали целых 14 Мп, куда столько? Лучше бы сделали новую 10-Мп, но с меньшими шумами». Восемь лет назад та же история наблюдалась при переходе от 6 Мп к 10 Мп. К чему это я? К тому,
что, несмотря на рост разрешения, раньше камерой с матрицей формфактора APS-C можно было снимать на ISO 200–400, сегодня же я без опаски могу выставить и ISO 1600, а иногда и 3200. При этом следует
учитывать, что, если снизить разрешение кадра с 24 до 6 Мп, шумы тоже снизятся, даже без применения дополнительных алгоритмов. Если добавить к этому возможность вырезать фрагменты кадра (если
позволяет оптика) в значительно большей степени, нежели при низком разрешении, действительно получается, что чем больше пикселей, тем лучше. Главное, чтобы делали матрицы опытные инженеры, например,
как в той же Sony.
Главное, чтобы делали матрицы опытные инженеры, например,
как в той же Sony.Цифровые фотокамеры
Журнал: Журнал IT-Expert [№ 05/2014], Подписка на журналы
Матрица камеры— обзор
3.2 Получение внутренних параметров камеры и трехмерных координат характерных точек
Предполагая, что мировые трехмерные координаты точки P в пространстве равны P w ( x w , у ш , г ш) в опорном кадре камеры, и его соответствующие координаты изображение р ( х р , у р ).Согласно обычной модели камеры-обскуры и искажению объектива [11,12], они связаны следующими уравнениями проекции:
xn = xw / zwyw / zw = xy, r2 = x2 + y2,
xd = xd (1 ) xd (2) = (1 + k1r2 + k2r4) xn + 2p1xy + p2 (r2 + 2×2) p1 (r2 + 2y2) + 2p2xy,
(2) xpyp1 = Kxd (1) xd (2) 1withK = fxα · Fxu00fyv0001.
, где ( u 0 , v 0 ) — главная точка на плоскости изображения, x n и x d — идеальные и фактические координаты изображения p соответственно. f x и f y обозначают эффективное фокусное расстояние, k 1 , k 2 — коэффициенты радиального искажения, а p 1 , p 2 — коэффициенты тангенциального искажения. α — коэффициент перекоса, а K — матрица камеры. Все эти внутренние параметры могут быть получены заранее с помощью некоторых эффективных методов калибровки камеры [13,14], и они считаются фиксированными после калибровки камеры.
Учитывая, что интервал между характерными точками известен, можно получить трехмерные локальные координаты характерных точек в соответствующей системе координат камеры [9], которые обозначаются как aijl и bijr ( i = 1, 2, …, м , j = 1, 2,…, n ) соответственно. Взяв для иллюстрации позу 1 на рис. особая точка b 11 , b 31 согласно RCCF соответственно.
Однако существует одна потенциальная проблема, заключающаяся в том, что выбросы, которые являются центрами характерных точек, извлеченных на изображении, выходят далеко за пределы их наземной истинности, могут не дать нам правильно вычислить трехмерные координаты характерной точки в пространстве. Хотя мы сделали характерные точки на наших целях светящимися, чтобы избежать этой проблемы в большинстве условий, все же существует вероятность того, что центры одной или двух характерных точек будут извлечены с большой ошибкой. В этом состоянии мы должны использовать алгоритм RANSAC [15], чтобы проверить центр всех характерных точек, извлеченных на одном изображении, с целью обнаружения и устранения возможных выбросов заранее, а затем использовать следы, характерные точки с допустимым шумом. , чтобы продолжить калибровку.И в этой статье мы предполагаем, что все извлеченные точки центра являются промежуточными и действительными.
Предположим, что в точке j -е направления единиц цели a , b при LCCF и RCCF равны ajl, bjl и ajr, bjr соответственно, поэтому их можно вычислить по следующему уравнению:
(3) ajl = amjl-a1jl / amjl-a1jl, bjr = bmjr-b1jr / bmjr-b1jr, (j∈ [1, n]).
Матрицы— Как найти положение и поворот камеры из матрицы 4×4?
Я недостаточно знаком с этой областью, чтобы знать, что такое соглашения, но я могу предоставить некоторый общий контекст.
Однородная матрица камеры размером $ 4 \ times 4 $ преобразует координаты из мирового пространства в пространство камеры. По-видимому, эта матрица , а не , включает перспективную проекцию, поэтому мы фактически говорим об аффинном преобразовании. Сама матрица может сказать вам, где находится камера в мировом пространстве и в каком направлении она указывает, но не может сказать вам ничего другого — для этого вам нужны другие параметры камеры.
Поскольку мы говорим здесь только о трансформации, нам нужны условные обозначения, чтобы рассказать нам о камере.Я привык к тому, что в пространстве камеры камера находится в начале координат и имеет оси, которые выглядят следующим образом:
Другими словами, камера смотрит вдоль положительной оси Z, а ось Y направлена вверх. T \, \ left [\ begin {массив} {c} 0 \\ 0 \\ 1 \ end {array} \ right] $.\ top $)
Я предполагаю, что традиционные координаты изображения камеры (до проецирования) имеют $ z $ сверление «в» изображение, $ x $ указывает слева направо, а $ y $ указывает вниз.
Теперь проследим, как оси нужно вращать без смещения: 1. новая ось $ z $ ($ z ‘$) будет указывать вдоль $ v-c $. 1. новая ось $ x $ ($ x ‘$) перпендикулярна $ z $ и $ z’ $ 1. новая ось $ y $ ($ y ‘$) перпендикулярна $ x’ $ и $ z ‘$.
Вы можете найти три вектора, которые указывают вдоль новых осей в мировых координатах, нормализовать их, а затем поместить их в строки матрицы $ 3 \ times 3 $ $ R $: это преобразует мировые координаты в повернутую ориентацию камеры.\ circ $. (Сначала мне было трудно это увидеть, но если вы нарисуете куб и проверите угол между $ (1,1,0) $ и $ (1,1,1) $, вы поймете, что я имею в виду.)
Теперь вы преобразовали мировые координаты в повернутую рамку, которая выровнена с рамкой вашей камеры, но отличается переводом. \ top $ и что расположение камеры в мире $ (10,10,10) $ теперь отображается к исходной точке камеры.Третьей проверки по вашему выбору должно быть достаточно, чтобы убедить вас, что это правильные $ R $ и $ t ‘$.
Одно предостережение: я не уверен на 100%, что шаг с $ z \ times z ‘$ всегда находится в таком порядке. В данном случае я выбрал его таким образом, потому что он давал правильную ориентацию для $ x ‘$ и $ y’ $ в конце. Надеюсь, это все согласуется, но, возможно, все же есть некоторая двусмысленность.
Второй вопрос — как построить вектор «ВВЕРХ».
Я не понимаю, о чем вы спрашиваете.\ top + t ‘$.
Наконец, мне придется также повернуть камеру из «альбомной» в «портретной» ориентации.
Я интерпретирую это как означающее, что вы хотите повернуть плоскость изображения так, чтобы ось $ y $ была горизонтальной, что можно сделать с помощью вращения $ \ pi / 4 $ в любом направлении вокруг камеры $ z $ -ось. \ top $ даст вращение в другое направление.
матричных уравнений — Почему в этой математической модели камеры есть деление на $ z $?
Я читаю документацию OpenCV о том, какую математическую модель они используют для камеры. Цитируемый ниже текст можно найти на этом веб-сайте, прокрутив его до раздела «Подробное описание». Я не совсем понимаю альтернативное описание, данное после матричного уравнения.
Функции в этом разделе используют так называемую модель камеры-обскуры.В этой модели вид сцены формируется путем проецирования трехмерных точек на плоскость изображения с использованием преобразования перспективы.
$$ с \; m ‘= A [R | t] M’ $$
или
$$ s \ begin {bmatrix} и \\ v \\ 1 \ end {bmatrix} знак равно \ begin {bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \ end {bmatrix} \ begin {bmatrix} r_ {11} & r_ {12} & r_ {13} & t_1 \\ r_ {21} & r_ {22} & r_ {23} & t_2 \\ r_ {31} & r_ {32} & r_ {33} & t_3 \ end {bmatrix} \ begin {bmatrix} X \\ Y \\ Z \\ 1 \ end {bmatrix} $$
где:
- ($ X $, $ Y $, $ Z $) — координаты трехмерной точки в мировом пространстве координат
- ($ u $, $ v $) — координаты точки проекции в пикселях
- $ A $ — матрица камеры или матрица внутренних параметров
- ($ c_x $, $ c_y $) — основная точка, которая обычно находится в центре изображения
- $ f_x $, $ f_y $ — фокусные расстояния, выраженные в пикселях.
Таким образом, если изображение с камеры масштабируется с коэффициентом, все эти параметры должны быть масштабированы (умножены / разделены, соответственно) с одинаковым коэффициентом. Матрица внутренних параметров не зависит от просматриваемой сцены. Таким образом, после оценки его можно использовать повторно при фиксированном фокусном расстоянии (в случае зум-объектива). Совместная матрица вращения-сдвига [R | t] называется матрицей внешних параметров. Он используется для описания движения камеры вокруг статической сцены или, наоборот, жесткого движения объекта перед неподвижной камерой.То есть [R | t] переводит координаты точки (X, Y, Z) в систему координат, фиксированную относительно камеры. Приведенное выше преобразование эквивалентно следующему (когда z ≠ 0):
$$ \ begin {array} {l} \ begin {bmatrix} x \\ y \\ z \ end {bmatrix} = R \ begin {bmatrix} X \\ Y \\ Z \ end {bmatrix} + t \ \ x ‘= x / \ color {red} {z} \\ y’ = y / \ color {red} {z} \\ u = f_x * x ‘+ c_x \\ v = f_y * y’ + c_y \ конец {array} $$
Утверждается, что оба представления эквивалентны, но тогда почему есть деление на $ \ color {red} {z} $ (отмечено красным)?
Насколько я могу судить, $ \ begin {bmatrix} x \\ y \\ z \ end {bmatrix} $ эквивалентно правой части матричного уравнения, а именно $ [R | t] M ‘$.Все, что осталось сделать, это умножить на матрицу $ A $, которая будет выглядеть так:
$$ s \ begin {bmatrix} и \\ v \\ 1 \ end {bmatrix} = A \ begin {bmatrix} x \\ y \\ z \ end {bmatrix} = \ begin {bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \ end {bmatrix} \ begin {bmatrix} x \\ y \\ z \ end {bmatrix} = \ begin {bmatrix} xf_x & 0 & zc_x \\ 0 & yf_y & zc_y \\ 0 & 0 & z \ end {bmatrix} $$
Теперь, чтобы сделать оба представления эквивалентными, мне пришлось бы разделить обе части уравнения на $ z $, но тогда в левой части уравнения будет $ / z $, которого нет в матрице. уравнение.
Конечно, коэффициент масштабирования $ s $, который в любом случае не имеет фиксированного значения, можно комбинировать с $ / z $, что означает, что дополнительный $ / z $ слева не обязательно является проблемой. Но почему это деление применяется в первую очередь? Мне это кажется совершенно произвольным и неуместным. В чем смысл?
Я не нашел объяснения в тексте.
линейная алгебра — матрица обратная перспектива
Местоположение на плоскости изображения даст вам луч, на котором лежит объект.Однако вам понадобится другая информация, чтобы определить, где на самом деле находится объект на этом луче. Эта информация теряется, когда объект проецируется на плоскость изображения. Предполагая, что объект находится где-то на дороге, это огромное упрощение . Теперь, вместо того, чтобы пытаться найти инверсию отображения перспективы, вам нужно только найти перспективную проекцию плоскости изображения на дорогу. Это довольно простая конструкция, аналогичная той, которая использовалась для получения исходной перспективной проекции.T $. Исходная проекция отображает все точки луча $ \ mathbf p_i t $ на эту точку. Теперь мы предполагаем, что дорога представляет собой плоскость, поэтому ее можно представить уравнением вида $ \ mathbf n \ cdot (\ mathbf p_o- \ mathbf r) = 0 $, где $ \ mathbf n $ — нормаль к плоскости, а $ \ mathbf r $ — некоторая известная точка на ней. Мы ищем пересечение луча и этой плоскости, при котором $ \ mathbf n \ cdot (\ mathbf p_i t- \ mathbf r) = 0 $. Решение для $ t $ и замена дает $$ \ mathbf p_o = {\ mathbf n \ cdot \ mathbf r \ over \ mathbf n \ cdot \ mathbf p_i} \ mathbf p_i.$$ Переходя к однородным координатам, это отображение представляет собой линейное преобразование, представленное матрицей $$ M = \ pmatrix {1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ {n_x \ over \ mathbf n \ cdot \ mathbf r} & {n_y \ over \ mathbf n \ cdot \ mathbf r} & {n_z \ over \ mathbf n \ cdot \ mathbf r} & 0}, $$ т.е. $$ \ mathbf p_o = M \ pmatrix {x_i \\ y_i \\ f \\ 1}. $$ После того, как вы это получите, должно быть очевидно, как завершить отображение в мировые координаты.
Осталось только найти параметры $ \ mathbf n $ и $ \ mathbf r $, которые описывают плоскость дороги в координатах камеры.T $. Преобразуйте их в координаты относительно камеры, и все готово.
Обратите внимание, что вам не обязательно знать что-либо о камере, чтобы вычислить перспективное преобразование, которое будет отображать плоскость изображения на плоскость дороги. Если вы каким-то образом можете найти четыре пары неколлинеарных точек, то есть пару четырехугольников, которые соответствуют друг другу на этих двух плоскостях, то связующее их плоское перспективное преобразование может быть вычислено довольно легко. Подробности смотрите здесь.По сути, вы калибруете обзор камеры, сопоставляя область изображения с известной областью на плоскости дороги.
Обновление 2018.10.22: Если у вас есть полная матрица камеры $ P $, что у вас есть, есть довольно простой способ построить обратное отображение точек на дороге с помощью нескольких матричных операций. Мы выбираем систему координат для плоскости дороги, которая дает нам матрицу $ 4 \ times3 $ $ M $, которая преобразует эти плоские координаты в мировые координаты, т.е.{-1} $. Для плоскости $ Y = 0 $ естественным выбором для $ M $ является $$ M = \ begin {bmatrix} 1 & 0 & 0 \\ 0 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \ end {bmatrix}, $$ который просто вставляет $ Y $ -координата нуля для получения мировых координат. Вы можете настроить начало этой системы координат, изменив последний столбец $ M $.
Рендеринг— матрица камеры 3х4 от камеры блендера
Для этого я написал функцию get_3x4_RT_matrix_from_blender, перечисленную ниже.
импортных баррелей в год
import bpy_extras
из mathutils import Matrix
из mathutils import Vector
# ------------------------------------------------- --------------
Матрица # 3x4 P от камеры Blender
# ------------------------------------------------- --------------
# Создание внутренних параметров камеры из данных камеры Blender
#
# См. Примечания по этому поводу в
# блендер.stackexchange.com/questions/15102/what-is-blenders-camera-projection-matrix-model
def get_calibration_matrix_K_from_blender (camd):
f_in_mm = camd.lens
сцена = bpy.context.scene
разрешение_x_in_px = scene.render.resolution_x
разрешение_y_in_px = scene.render.resolution_y
scale = scene.render.resolution_percentage / 100
sensor_width_in_mm = camd.sensor_width
sensor_height_in_mm = camd.sensor_height
pixel_aspect_ratio = scene.render.pixel_aspect_x / scene.render.pixel_aspect_y
если (camd.sensor_fit == 'ВЕРТИКАЛЬНЫЙ'):
# высота сенсора фиксированная (посадка сенсора горизонтальная),
# ширина сенсора эффективно изменяется с соотношением сторон пикселя
s_u = разрешение_x_in_px * scale / sensor_width_in_mm / pixel_aspect_ratio
s_v = разрешение_y_in_px * scale / sensor_height_in_mm
else: # "ГОРИЗОНТАЛЬНО" и "АВТО"
# ширина сенсора фиксированная (сенсор устанавливается горизонтально),
# высота сенсора эффективно изменяется с соотношением сторон пикселя
pixel_aspect_ratio = сцена.render.pixel_aspect_x / scene.render.pixel_aspect_y
s_u = разрешение_x_in_px * scale / sensor_width_in_mm
s_v = разрешение_y_in_px * масштаб * pixel_aspect_ratio / sensor_height_in_mm
# Параметры матрицы внутренней калибровки K
alpha_u = f_in_mm * s_u
alpha_v = f_in_mm * s_v
u_0 = разрешение_x_in_px * масштаб / 2
v_0 = разрешение_y_in_px * масштаб / 2
skew = 0 # использовать только прямоугольные пиксели
K = Матрица (
((alpha_u, перекос, u_0),
(0, alpha_v, v_0),
(0, 0, 1)))
вернуть K
# Возвращает матрицы поворота и перемещения камеры из Blender.#
# Используются 3 системы координат:
№1. Мировые координаты: «мир».
# - правша
# 2. Координаты камеры Blender: "bcam"
# - x горизонтально
# - у вверху
# - правый: отрицательное направление взгляда по оси z
# 3. Желаемые координаты камеры компьютерного зрения: "cv"
# - x горизонтально
# - y внизу (для выравнивания по фактическим координатам пикселей
# используется в цифровых изображениях)
# - правостороннее: положительное направление взгляда по оси z
def get_3x4_RT_matrix_from_blender (камера):
# bcam обозначает камеру блендера
R_bcam2cv = Матрица (
((1, 0, 0),
(0, -1, 0),
(0, 0, -1)))
# Транспонировать, поскольку вращение - это вращение объекта,
# и нам нужно вращение координат
# R_world2bcam = cam.Rotation_euler.to_matrix (). transposed ()
# T_world2bcam = -1 * R_world2bcam * местоположение
#
# Используйте вместо этого matrix_world для учета всех ограничений
местоположение, вращение = cam.matrix_world.decompose () [0: 2]
R_world2bcam = Rotation.to_matrix (). Transposed ()
# Преобразование местоположения камеры в вектор перевода, используемый при изменении координат
# T_world2bcam = -1 * R_world2bcam * cam.location
# Используйте местоположение из matrix_world для учета ограничений:
T_world2bcam = -1 * R_world2bcam @ локация
# Построить матрицу преобразования координат из мира в камеру компьютерного зрения
# ПРИМЕЧАНИЕ: используйте * вместо @ для старых версий Blender.
# TODO: определить версию Blender
R_world2cv = R_bcam2cv @ R_world2bcam
T_world2cv = R_bcam2cv @ T_world2bcam
# поместить в матрицу 3x4
RT = Матрица ((
R_world2cv [0] [:] + (T_world2cv [0],),
R_world2cv [1] [:] + (T_world2cv [1],),
R_world2cv [2] [:] + (T_world2cv [2],)
))
вернуть RT
def get_3x4_P_matrix_from_blender (кулачок):
K = get_calibration_matrix_K_from_blender (cam.данные)
RT = get_3x4_RT_matrix_from_blender (камера)
возврат K @ RT, K, RT
# ------------------------------------------------- ---------
# Альтернативные 3D-координаты коду проекции 2D-пиксельных координат
# адаптировано из https://blender.stackexchange.com/questions/882/how-to-find-image-coordinates-of-the-rendered-vertex?lq=1
# чтобы оси y указывали вверх, а начало координат - в верхнем левом углу
def project_by_object_utils (кулачок, точка):
сцена = bpy.context.scene
co_2d = bpy_extras.object_utils.world_to_camera_view (сцена, камера, точка)
render_scale = сцена.render.resolution_percentage / 100
render_size = (
int (scene.render.resolution_x * render_scale),
int (scene.render.resolution_y * render_scale),
)
вернуть вектор ((co_2d.x * render_size [0], render_size [1] - co_2d.y * render_size [1]))
# ------------------------------------------------- ---------
если __name__ == "__main__":
# Вставьте сюда название вашей камеры
cam = bpy.data.objects ['Camera.001']
P, K, RT = get_3x4_P_matrix_from_blender (кулачок)
печать ("К")
печать (K)
печать ("RT")
печать (RT)
печать ("P")
печать (P)
print ("==== Тесты ====")
e1 = Вектор ((1, 0, 0, 1))
e2 = Вектор ((0, 1, 0, 1))
e3 = Вектор ((0, 0, 1, 1))
O = Вектор ((0, 0, 0, 1))
p1 = P @ e1
p1 / = p1 [2]
print ("Прогнозируемый e1")
печать (p1)
print ("проект по object_utils")
print (project_by_object_utils (cam, Vector (e1 [0: 3])))
p2 = P @ e2
p2 / = p2 [2]
print ("Прогнозируемый e2")
печать (p2)
print ("проект по object_utils")
print (project_by_object_utils (cam, Vector (e2 [0: 3])))
p3 = P @ e3
p3 / = p3 [2]
print ("Прогнозируемый e3")
печать (p3)
print ("проект по object_utils")
print (project_by_object_utils (cam, Vector (e3 [0: 3])))
pO = P @ O
pO / = pO [2]
print («Прогнозируемое мировое происхождение»)
печать (pO)
print ("проект по object_utils")
print (project_by_object_utils (cam, Vector (O [0: 3])))
# Бонусный код: сохранить матрицу 3x4 P в текстовый файл
# Не забудьте для этого импортировать numpy
nP = numpy.матрица (P)
numpy.savetxt ("/ tmp / P3x4.txt", nP) # для выбора точности, например, fmt = '%. 2f'
Я включил несколько вспомогательных функций и тестов для перекрестной проверки процесса 3D-2D проекции с другим подходом, использующим world_to_camera_view из ответа @ ideasman42 на вопрос Как найти координаты изображения визуализированной вершины? Координаты с плавающей запятой идеально совпадают с точностью до многих десятичных знаков. Чтобы получить координаты целых пикселей после проецирования, просто округлите их.
Я проверил это визуально и аналитически на нескольких сценах, чтобы убедиться, что обе процедуры точно верны на реальных визуализированных изображениях.
- Я изобразил e1, e2, e3 и O маленькими коническими объектами, концы которых находились в желаемых положениях и закодированы разными цветами: красный для X, зеленый для Y, синий для Z
- Сначала я разместил камеру в удобном месте, R = идентичность, T = (0,0,5)
- Я использовал параметры Blender по умолчанию для встроенных функций камеры
- Я вычислил матрицу P вручную и вычислил ее, используя свои рутинные программы, и они идеально совпадают.
- Визуальное сравнение рендеринга Cycles и рендеринга OpenGL в GIMP показывает, что полученные координаты хорошо визуально совпадают (с точностью до, возможно, + — 1 пиксельной ошибки, что в любом случае проводилось при тщательном тестировании — предстоит изучить).
- Затем я произвольно повернул и переместил камеру так, чтобы мир e1, e2, e3 оставался видимым и находился в общих местах. Проекции визуально совпадают на визуализированных изображениях, а также совпадают с проекциями, заданными процедурой утилиты объектов, приведенной выше.
Вот пример тестового вывода:
К
<Матрица 3x3 (2100.0000, 0.0000, 960.0000)
(0,0000, 2100,0000, 540,0000)
(0,0000, 0,0000, 1,0000)>
RT
<Матрица 3x4 (-0.0594, -0,9483, -0,3118, -0,6837)
(0,6234, 0,2087, -0,7536, -0,1887)
(0,7797, -0,2391, 0,5787, 4,2599)>
п
<Матрица 3x4 (623.8236, -2220.9482, -99.1637, 2653.7441)
(1730.0916, 309.2392, -1269.9426, 1904.1343)
(0,7797, -0,2391, 0,5787, 4,2599)>
==== Тесты ====
Прогнозируемый e1
<Вектор (650.3716, 721.1436, 1.0000)>
proj от object_utils
<Вектор (650.3716, 721.1436)>
Прогнозируемый e2
<Вектор (107.6402, 550.4857, 1.0000)>
proj от object_utils
<Вектор (107.6403, 550.4857)>
Прогнозируемый e3
<Вектор (527.9586, 131.0692, 1.0000)>
proj от object_utils
<Вектор (527.9586, 131.0693)>
Прогнозируемое мировое происхождение
<Вектор (622.9655, 446.9949, 1.0000)>
proj от object_utils
<Вектор (622.9656, 446.9949)>
Вот тестовый набор с поворотом блендера и расположением камеры. Вот рендер OpenGL. Выведенные выше координаты визуально совпадают с кончиками конусов (ошибка до + — 1 пиксель, возможно, из-за наложения спектров).
Ограничения : этот код в настоящее время не поддерживает определенные конфигурации параметров камеры, см. Мой ответ на вопрос Что такое модель матрицы проекции камеры в блендере? список ограничений для get_calibration_matrix_K_from_blender .
Координаты объекта : для работы с координатами объекта сначала преобразуйте их в мировые координаты, см. Мой ответ на вопрос Как найти координаты изображения визуализированной вершины?
Умножение матриц было * до Blender 2.8, в более новых версиях вместо этого используется @
Матрица: Добро пожаловать в машину
Режиссеры Ларри и Энди Вачовски вместе с кинематографистом Биллом Поупом создают потрясающий футуристический боевик « Матрица».
Фотография Джейсона Боланда, любезно предоставлена Warner Bros.
Эта история была первоначально опубликована в AC за апрель 1999 г. Некоторые изображения являются дополнительными или альтернативными.Компьютеризированные гаджеты играют в нашей повседневной жизни все более важную роль — от автомобилей с микропроцессорным управлением до сверхскоростной электронной почты в Интернете и сотовых телефонов, — что можно задаться вопросом, не виляет ли собака хвостом. С приближающимся концом тысячелетия, вызывающим волны паранойи и истерии по поводу компьютерных сбоев 2000 года, неудивительно, что технофобные фильмы, такие как 2001: Космическая одиссея Стэнли Кубрика (1968) и Джеймс Кэмерон Терминатор (1984) кажутся когда-либо — более точные изображения микрочипов выходят из-под контроля.
Матрица , новый фильм от братьев-сестер Ларри и Энди Вачовски, предлагает еще более мрачное видение будущего. Родившись в Чикаго в середине 1960-х, Вачовски выросли на здоровой диете из комиксов, японской анимации и всевозможных фильмов. Работая на стройке, братья начали писать комиксы и сценарии, в которых сочеталась внешне непохожая эстетика их любимых жанров. Перед своим режиссерским дебютом в 1997 году в мрачном и стильном триллере « Bound » (который они также написали в соавторстве) дуэт уже написал сценарий для «Матрица».
Сценаристы-постановщики Энди и Ларри Вачовски в Австралии.«Наша главная цель с The Matrix состояла в том, чтобы сделать интеллектуальный боевик, — объясняет Ларри. «Нам нравятся боевики, оружие и кунг-фу, но мы устали от конвейерных боевиков, лишенных какого-либо интеллектуального содержания. Мы были полны решимости воплотить в фильм как можно больше идей и целенаправленно пытались вывести на экран изображения, которых люди никогда раньше не видели ».
Out of the Void
В течение многих лет сценарий для The Matrix томился в подвешенном состоянии, потому что многие в Голливуде не могли уловить сложный рассказ и экстравагантные визуальные элементы сказки. «Едва ли кто-нибудь в городе это понимал, — говорит Ларри. «Это стало почти шуткой. Люди думали, что это слишком сложно и слишком плотно ».
«Предпосылка для The Matrix началась с идеи, что все в нашем мире, каждое волокно реальности — это фактически симуляция, созданная в цифровой вселенной», — объясняет он.«Как только вы начнете [нарративно] иметь дело с электронной реальностью, вы действительно сможете раздвинуть границы того, что может быть возможным для человека и визуально».
Чтобы преобразовать эту концепцию в более понятную форму, Вачовски наняли нескольких мастеров комиксов, в том числе популярного художника Hard Boiled Джефа Дэрроу, чтобы они вручную нарисовали весь фильм в виде высокографической библии-раскадровки. «Нам не очень нравится, как делают обычные раскадровки», — говорит Ларри. «Вместо этого мы пригласили некоторых наших друзей, чтобы они нарисовали каждый ритм действия, визуальный момент и стилистический кадр в фильме.Затем в течение нескольких месяцев мы изучали каждый кадр, пытаясь понять, как атаковать каждый кадр. Это также позволило нам быть очень конкретными с точки зрения требований к бюджету и визуальным эффектам ».
Оператор Билл ПоупЭто графическое изображение фильма также стало неоценимым инструментом для кинорежиссера Билла Поупа, чей общий интерес к комиксам ранее привел его к назначению режиссера-постановщика на Bound Вачовских. Поуп вспоминает: «Они видели и любили [фильм ужасов-фэнтези 1993 года] Армия тьмы , который я снимал для режиссера Сэма Рэйми.Меня вызвали, и у нас была потрясающая встреча. Думаю, они наняли меня, потому что я читал комиксы и знал, о чем они говорили, когда упоминали конкретное название. На самом деле, во время нашей встречи на их столе лежала копия книги Фрэнка Миллера Sin City , поэтому я спросил: «Вы хотите, чтобы фильм выглядел именно так?» Мы все были впечатлены тем, как Миллер использовал высококонтрастные, угольно-черные области в кадре, чтобы сфокусировать взгляд, и его крайняя стилизация реальности. Давно хотел сделать что-то стилизованное под фильм.»
Папа проверяет свою выдержку на съемочной площадке.Не случайно именно «стилизация» легла в основу ранней карьеры Поупа. Оператор вспоминает, что, окончивший в 1977 году кинопрограмму Нью-Йоркского университета, «киношкола тогда была довольно напряженной, потому что лишь немногие из нас сосредоточились на кинематографии. Все остальные хотели руководить. В моем классе это был только Кен. Келш [ASC] и я, а в классе позади нас был только [режиссер и бывший оператор] Барри Зонненфельд Мы трое снимали фильмы для всех остальных.После учебы я снял несколько из тех ранних видеороликов, которые показывали только по замкнутым телевизорам в клубах. Когда в начале 1980-х появился MTV, и все начали снимать видео, люди говорили: «Берите Билла Поупа, он снимал эти вещи!» Неожиданно я стал оператором-постановщиком ».
Поуп потратит остаток десятилетия, снимая несколько сотен видеороликов. Попутно он получил премию MTV за лучшую операторскую работу за свою черно-белую операторскую работу над клипом Стинга «Сегодня вечером мы будем вместе».«
Затем он перешел к рекламе и очеркам. «В 1989 году Сэм Рэйми дал мне шанс снять [научно-фантастическое фэнтези] Darkman », — вспоминает Поуп. «Я получил работу только потому, что Барри Зонненфельд сказал Сэму нанять меня. К счастью, Сэм просто сказал:« Тебя наняли, пошли! » В противном случае у меня никогда бы не получился полнометражный фильм. Долгое время музыкальные видеоклипы считались незаконнорожденными детьми киноиндустрии. Только в конце 80-х — начале 90-х годов кинематографисты музыкального видео даже считались достаточно законными, чтобы снимать рекламные ролики.Однако после того, как я снял Darkman , я смог сконцентрироваться на съемках фильмов и рекламных роликов ». Другие работы Поупа включают The Zero Effect, Gridlock’d, Clueless и Fire in the Sky. Кроме того, он снял пилот телесериала Максимум Боб , режиссером которого был Зонненфельд.
Технологии захватывают все
Сюжетная концепция, которая движет Матрица , сложна: 2197 год, а человеческая реальность — это просто компьютерно смоделированная среда.«В какой-то момент в прошлом искусственный интеллект захватил мир», — рассказывает Поуп. «Пытаясь восстановить контроль, люди затемнили солнце, потому что компьютеры работали на солнечной энергии. Но машины перехитрили нас и захватили наши тела, поместив их в капсулы и используя их в качестве батарей — отнимая БТЕ, которые мы Пока мы плаваем в жидкости, они проецируют в наш мозг мир, в котором мы думаем, что живем, который называется Матрицей. Все, что мы делаем в нашей жизни, каждый день, является всего лишь компьютерной симуляцией реальности.
«Некоторые люди поняли это, однако, и ведут битву против компьютеров. Эти повстанцы сражаются внутри Матрицы против агентов, которые сами являются компьютерными программами. Агенты могут делать все, что угодно, становиться кем угодно и изменять любой естественный закон, но люди не могут. Один из главных героев, Морфеус [Лоуренс Фишберн], ищет человека, который, как сообщается, может делать то же, что и компьютеры: проходить через Матрицу и изменять реальность. Морфеус считает, что этот человек — Нео [Киану Ривз] .
Нео выживает, будучи анонимным компьютерным программистом, невольно попав в ловушку Матрицы. Поуп осветил все сцены этого виртуального мира зеленоватым оттенком. «Это довольно сложная история о Христе, — признает Поуп, — но для Вачовски и меня одним из лучших видов комиксов является история о происхождении», которая описывает истоки таких супергероев, как Сорвиголова или Человек-паук. Matrix — это история происхождения Нео ».
Ларри Вачовски добавляет: «Мы хотели, чтобы фильм был путешествием сознания.Главный герой, который ведет зрителей в это путешествие, — Нео, который изначально знает о мире фильма не меньше, чем зрители. Однако вскоре мы обнаруживаем, что персонажи фильма могут мгновенно получить информацию, загруженную в их головы; Нео может, например, внезапно стать мастером кунг-фу, как Джеки Чан!
«Я знаю кунг-фу»: Морфеус и Нео спарринговались в виртуальном додзё — часть тренировочной программы, которая мгновенно загружает любые желаемые способности. «Энди и я любим гонконгские боевики, и мы оба чувствуем, что они намного опережают американские боевики с точки зрения того волнения, которое этот боевик привносит в историю.Американские кинематографисты дошли до того, что создают свои бои в монтажной. Эти типы последовательностей просто созданы для интуитивного, мгновенного воздействия, и мозг аудитории никогда не задействуется. Есть куча быстрых решений — бац! бац! бац! — и тут все кончено; борьба никогда не вовлекает аудиторию на уровне истории. Режиссеры боевиков из Гонконга на самом деле привносят сюжетные линии в боевые действия и рассказывают небольшую историю боевых действий ».
A Ballet of Violence
Помня об этой восточной эстетике, Вачовски наняли известного гонконгского режиссера и постановщика трюков Юэнь Во Пина для координации всех сложных боевых сцен в The Matrix, , а также в качестве личного единоборства. — тренер для четырех основных актеров. «Чтобы снять эти очень сложные боевые сцены, — говорит Ларри, — нам пришлось взять четырех западных актеров и обучить их кунг-фу в течение четырех месяцев перед началом съемок.В Гонконге Во Пинг обычно режиссирует свои боевые сцены и выбирает все ракурсы камеры. Что касается наших боев, мы говорили с ним о фактической сюжетной линии боя, а затем он уходил и ставил ее. Как только он отыграет весь «танец» боя, мы спросим, что он порекомендует для каждого удара. Затем мы добавляли к этому любые элементы, движения камеры или другие углы, которые хотели ».
Неотъемлемой частью боевой хореографии Во Пина является его легендарное использование трюков с привязью.Поистине впечатляющий подвиг визуального обмана, эта техника позволяет актерам, казалось бы, игнорировать законы физики, прыгая, летая и кружась вокруг своих противников в бою. «Проволока Ву Пинга самая лучшая», — подтверждает Ларри. «Используя систему проводов, вы можете очень легко импровизировать. Они могут положить провод куда угодно и в любой момент подключить к нему кого-нибудь. Им не нужна большая установка — просто группа парней, которые хватаются за нее и говорят: ‘Погнали!’ Это очень быстро, плавно и безопасно. В гонконгских фильмах о кунг-фу люди обычно связывают все, от прыжков до вставания и даже бега.Это делает все движения очень изящными и немного сюрреалистичными. Мы думали, что это идеально подходит для The Matrix .
«Мы также пытались детализировать действие так, как это больше не принято в Голливуде», — продолжает Ларри. «В насилии много невероятных и красивых образов, и я думаю, что насилие может быть отличным инструментом для повествования. [Создатели фильмов] придумали невероятный язык для обозначения насилия. Например, что Джон Ву [ The Killer, Face / Off ] делает с его разновидностью гипер-насилия великолепно.Он выводит жестокие образы на новый уровень. Мы также попытались сделать это с The Matrix . «
Воображая будущее
С учетом сложных требований змеевидного повествования фильма и грандиозных условий и событий, которые предвидели Вачовски, продюсеры решили снимать весь фильм в Сиднее, Австралия. Используя практически все сцены в городе, включая все сцены Fox в их новой студии, а также несколько переоборудованных складов, производство быстро стало заметным.Среди сотен австралийских членов команды на шоу были художник-постановщик Оуэн Патерсон, художник по костюмам Ким Барретт, гаффер Рег Гарсайд, монтажник Крейг Брайант, ключевой Рэй Браун, оператор Дэвид Уильямсон, фокусники Дэвид Элмс и Адриан Сеффррин, хлопушка / погрузчик Джейсон Бинни и погрузчик Джоди Смит, а также второй оператор-постановщик Росс Эмери и подводный оператор Роджер Бэкингем, ACS.
«Моя подготовка к Матрица состояла из двух месяцев планирования и изменения графика», — рассказывает Поуп.«Семья Вачовски была захвачена множеством опасений из-за уровня сложности фильма. Все нужно было заранее продумать и объяснить. Ларри и Энди по своей природе сдержанные люди, поэтому им это было трудно. Обычно они не хотят говорить вам ничего, кроме они вынуждены. Во время моей подготовки к Bound , например, я попросил их сесть со мной и просмотреть каждую сцену. Вначале они пытались не обращать внимания на мои вопросы, говоря что-то вроде: « Ну, сцена — это просто два парня, сидящих и разговаривающих.Тогда я бы спросил, как они планировали это освещать. Они говорили: «О, условно». Тогда я должен был бы сказать: «Хорошо, давайте вернемся назад — какой первый выстрел?» Наконец, они говорили: «Ну, мы начнем с ботинка одного парня, поднимемся по его телу, окажемся на его лице в очень крупном плане, а затем перейдем к другому человеку». Теперь мы смеемся, когда говорим «обычное» освещение. В итоге мы прошли все Bound по кадрам. Однако в «Матрице» братья были так заняты во время подготовки, что такой встречи не было.»
Поскольку весь фильм был тщательно раскадрован по цвету, Поуп действительно понимал визуальный стиль, который хотели создать режиссеры. «Ларри и Энди хотели, чтобы в The Matrix было два разных мира, — говорит оператор. «Есть мир будущего 2197 года, в котором у нас есть капсулы, созданные с помощью компьютеров, а также есть современный мир Матрицы, который был задуман как немного непривлекательная реальность.
В Матрице полиция приближается к Тринити, прежде чем она берет на себя ответственность.Выше Мосс настраивается с каскадером в униформе, пока режиссеры смотрят на него. «Будущий мир холоден, темен и пронизан молниями, поэтому мы оставили освещение чуть более синим и сделали его черным как ад. Кроме того, реальность будущего очень мрачна, потому что нет смысла ее чистить — стерильными должны быть только стручки. Поскольку люди фактически ничего не производили в течение ста лет, все, что было произведено, теперь устарело и заржавело.
«Мы не обязательно хотели, чтобы мир Матрицы напоминал наш нынешний мир», — добавляет Поуп.«Нам не нужны были веселые голубые небеса. В Австралии небо ярко-синее практически всегда, но мы хотели лысое, белое небо. Все наши подложки TransLight [для сценической работы] были изменены, чтобы небо было белым. , а на реальных снимках экстерьера, на которых мы видим много неба, мы улучшили его цифровым способом, чтобы сделать его белым.Кроме того, поскольку мы хотели, чтобы реальность Матрицы была непривлекательной, мы спросили себя: «Какой цвет самый непривлекательный?» Я думаю, мы все согласились с зеленым цветом, поэтому для этих сцен мы иногда использовали зеленые фильтры, и я бы добавил немного зеленого в цветовую синхронизацию.»
Поуп сфотографировал The Matrix , используя камеры Panavision Platinum и объективы Primo с фиксированным фокусным расстоянием, которые он привез с собой из Вудленд-Хиллз, Калифорния. (На момент производства Samuelson Film Services в Сиднее только недавно была приобретена Panavision и не могла удовлетворить потребности фильма.) Оператор снимал в формате Super 35 2.35: 1 с использованием Kodak Vision 500T 5279 и 200T. 5274 шт. «Мы снимали весь день экстерьеры и эффекты на 5274 и использовали 5279 для всех интерьеров.Мне нравится внешний вид 79, и мне нравится видеть немного зерна. Я снимал в Super 35 частично из-за того, что у меня было слишком много камер, чтобы создать достаточно анаморфотных линз, а также из-за огромных размеров наборов. Я чувствовал, что у меня могли быть небольшие проблемы с освещением декораций, чтобы получить остановку, которая нам нужна для анаморфизма. Тем не менее, мне нравится Super 35; Я также снимал Fire in the Sky в этом формате ».
Дополнительный важный фактор в подходе к освещению фильма был продиктован специальной фотографической техникой, которую Вачовски были полны решимости внедрить в съемку.Этот подход был вдохновлен новым владением Нео виртуальным временем и пространством. Ларри объясняет: «Мы хотели снимать большую часть действия в режиме сверхзамедленной съемки — до 300 кадров в секунду. Для некоторых снимков мы хотели снимать на высокой скорости, сохраняя при этом видимое движение камеры на постоянной скорости, что в основном На подготовительной стадии мы рассмотрели идею ракетной камеры, которую мы собирались снимать на съемочной площадке со скоростью примерно 100 миль в час при съемке со скоростью 150 кадров в секунду, но [руководитель визуальных эффектов] Джон Гаэта придумал другой процесс, который стала основой для этих последовательностей.»
(Эта экстремально замедленная фотография, названная Вачовски «Bullet Time», подробно описана в сопровождающей истории визуальных эффектов также в этом выпуске.)
Освещение для скорости
«Наборы для Matrix были огромными — самыми большими, которые я лично когда-либо видел», — говорит Поуп. «У нас постоянно работали две камеры. Первый блок снимал 118 дней, а второй — 90 дней. Первые 40 дней были потрачены на съемки на крышах в центре Сиднея, где из-за проблем с безопасностью мы действительно не могли установить продуманное освещение или что-нибудь летающее.Там я в основном использовал некоторую негативную заливку, и на этом все закончилось — и это было нормально, потому что мне нравится работать естественным образом. В общем, мы использовали бы огни только для согласования целей, потому что погода в Сиднее меняется быстро и часто ».
Австралийский бригадир Рег Гарсайд продолжает: «Все эти экстерьеры были связаны с логистическими проблемами. Мы снимали в центре Сиднея, где выполнялась вся городская работа. Нам пришлось поднимать генераторы на полпути по краям зданий, потому что мы требовалось 200 или 300 ампер фазной мощности на некоторых крышах.Нам нужно было не только обеспечить освещение, но и обеспечить электроэнергией специалистов по спецэффектам, у которых также были эти большие дымовые машины ».
Перемещаясь в помещении, Поуп и Гарсайд столкнулись с огромной задачей по освещению огромных декораций, чтобы обеспечить желаемую для Вачовски частоту кадров 300 кадров в секунду для чрезвычайно замедленных снимков. Примечания Гарсайда: «Требования к высокоскоростному освещению были большой проблемой, потому что на больших площадках, таких как метро, экстерьер правительственного здания и вестибюль, нам требовалось огромное количество света, чтобы иметь возможность снимать между Т2 Билла.8 base и T16, необходимый для скоростной съёмки. Фактически, на некоторых этапах нам пришлось установить более 1000 банок Par в перманентах [для получения необходимых уровней света]. Я много использовал баллончики Par, потому что я мог легко управлять атмосферой от T2.8 до T16, просто включая и выключая дополнительные устройства. Кроме того, банки Par намного дешевле, чем Maxi-Brutes, и хотя в них используются лампы того же типа [Par 64], я обнаружил, что могу установить их в гораздо более странных или сложных местах, чем я могу установить Maxi. Иметь 1000 банок Par на самом деле все равно, что иметь 80 Maxis, но у нас в Австралии нет даже 80 Maxi-Brutes!
«Для скорости и максимального контроля, — продолжает Гарсайд, — каждый свет проходил через диммерную стойку, поэтому, если Билл сказал мне дать ему Т8, я мог бы дать ему Т8, отрегулировав рычаг на элементах управления.Для T2.8 вы можете использовать только одну лампу, но для T16 вам может понадобиться 32 лампы. Вы действительно имеете дело с экспоненциальным эффектом удвоения, чтобы получить дополнительные стопы. Билл на самом деле использовал много верхнего света через световую решетку, чтобы создать атмосферу. Так что у меня был [такелажник] Крэйг Брайант, предварительно подготовивший паровые баллончики на крыше для создания атмосферы, которая могла бы поднять меня до T16. Затем нам пришлось изготовить множество нестандартных накладных платков, которые мы называем парусами, и практически вручную установить их на декорации.»
Поуп поясняет: «Мы снимали большую часть этого фильма с лампами накаливания. Кроме того, используя баллончики Par, мы могли изменять уровень освещенности без изменения цветовой температуры, просто путем включения или выключения устройств. Однако мне нравится использовать Kino. Флора на лицах для интерьеров. На самом деле, я предпочитаю, чтобы вокруг актеров были Кинос, потому что они намного круче. В этом фильме мы использовали целые грузовики Wall-O-Lites и 4 ‘на 4’ Kinos «.
После пробуждения от кибер-созданной реальности Матрицы Нео раскрывает правду о заговоре машин по сбору энергии человечества. Harvesting Humanity
Для ключевого набора, изображающего будущую реальность человечества, художник-постановщик Оуэн Патерсон ( Приключения Присциллы, Королевы пустыни; Добро пожаловать в Вуп-Вуп ) сконструировал несколько инкубационных капсул, в которых живут люди. удерживаются в стазисе, пока их энергия прослушивается компьютерами. «У нас было около шести таких наполненных жидкостью капсул», — описывает Поуп. «Каждый был достаточно большим для человека и выступал из стены 30 на 60 футов, которую построил Оуэн.Каждая капсула была на высоте около 15 футов над землей, что потребовало строительства множества рабочих платформ для актеров и съемочной группы. Мы остановились на более холодном свете — 1/4 CTB на вольфрамовых лампах — и снова использовали большой мягкий верхний свет, около 200 банок Par проходили через легкую сетку. У нас также были Kino Flos, поднимавшиеся снизу [чтобы предложить бесконечное количество модулей выше и ниже шести практических опор]. У нас также были отряды Lightning Strikes, которые время от времени выскакивали, потому что в реальности будущего должно быть много статического электричества.Кроме того, Реджи, Оуэн и я много работали над тем, чтобы встроить несколько Kinos и MR-16 в сами капсулы ».
«Зажигать капсулы было довольно сложно, потому что они были полны этой красной жидкой слизи», — уточняет Гарсайд. «Мы хотели заставить их светиться, поэтому мы использовали безопасные для подводного плавания блоки Kino Flo от Hydroflex, которые мы встроили в основание каждой капсулы. Эта техника очень хорошо работала для широких снимков. Когда мы подошли ближе, мы использовали тот же интерьер. освещение, но поскольку капсулы были сделаны из прозрачного материала Perspex, мы улучшили их освещение, подсвечивая 1K младенцев снизу.»
Логово повстанцев
После того, как Нео пробуждается от ограниченного пространства капсулами и Морфеус показывает ему истинную судьбу человечества, он присоединяется к небольшой группе повстанцев, действующих вне контроля Матрицы. Члены этой фракции независимо входят и покидают киберсферу, чтобы стать более искусными в изменении виртуальной реальности Матрицы. Для этой цели повстанцы собрали импровизированное судно на воздушной подушке Nebuchadnezzar , которое они перемещают по канализационным коллекторам монолитной компьютерной сети.
«Внутри« Навуходоносора »у повстанцев есть специальные стулья, которые удерживают их тела в состоянии анабиоза, пока они питают свой разум Матрицей», — уточняет Папа. «Корабль представлял собой невероятную конструкцию. У него была цельная стальная центральная секция, которая поддерживала кресло каждого повстанца, которое было гидравлически шарнирно. Стулья были окружены мониторами и различными механизмами, а пол представлял собой своего рода пористую решетку.Мы снимали резкий и мягкий свет снизу через решетку, хотя никогда не позволяли этому свету поразить актеров. Они всегда были довольно мягко освещены лампами Kino Flo, которые были либо встроены над каждым стулом, либо установлены на подставках. Мы также интегрировали в дизайн несколько банок MR-16 и Par. В целом корабль оставался довольно темным и скользким, а поверхности намочили, чтобы получить блестящие блики на конструкции ».
Установка освещения в тесноте на съемочной площадке Навуходоносора.добавляет Garside: «Из-за характера этого набора мы действительно не могли использовать верхний парус для создания атмосферы. Набор был разработан так, чтобы разбираться на части: крыша поднималась до сетки, а боковые стороны тянулись к стене, оставляя только центральная секция и стулья. Из-за этого ключа, Рэя Брауна и меня, пришлось встроить наши оснастки в набор, чтобы, если бы набор сдвинулся, свет был прикреплен, и это не изменило ощущения. бортов корабля, но мы не хотели видеть, что было снаружи.Поэтому мы скользили по бокам 2K Juniors с 1/4 CTB, чтобы подчеркнуть рельеф и создать некоторую глубину ».
Столкновение в вестибюле
Когда Морфеус схвачен тремя агентами и удерживается в здании правительственного офиса, «Нео возвращается в Матрицу, в основном с самоубийственной миссией, чтобы спасти его», — объясняет Поуп. «Никто никогда не выжил в битве даже с одним агентом, но Нео собирается атаковать все правительственные войска, армию и трех агентов!»
Войдя в вестибюль здания, Нео и его напарница Тринити (Кэрри-Энн Мосс) сталкиваются с головокружительным натиском пуль и хаосом со стороны хорошо вооруженных войск. «Нео и Тринити мчатся вдоль вестибюля, стреляя во всех, — замечает Поуп со смешком. «Каменные колонны в вестибюле буквально разрушаются, повсюду разбрызгиваются огромные куски камня. Для большей части наших высокоскоростных работ мы использовали Wilcam-12 Клермонта, и большая часть перестрелок снималась со скоростью 300 кадров в секунду, что требовало Рег и я, чтобы осветить установку примерно до T11 [при съемке с 79, с базовой экспозицией около T2.8/4]. «
«Поскольку Вачовски использовали широкоугольные линзы, такие как 10 мм и 14,5 мм, мы действительно не могли освещать съемочную площадку с пола», — вспоминает Гарсайд. «По сути, нам приходилось освещать все это с потолка с большой атмосферой, поэтому снова у нас было около 1000 банок Par на крыше».
«Стены вестибюля были темно-зеленого цвета, — добавляет Поуп. «Многие действия происходили в двух боковых колоннадах, куда не попадал верхний свет, поэтому я использовал несколько динозавров и мини-дино на полу для моделирования в этих местах.В сетке размером 12 на 12 и 8 на 8 футов всегда сжигали одновременно не менее восьми или девяти динозавров. Я попытался воспроизвести весь свет с одной стороны, и мы использовали очень мало заполняющего света. Однако, если ваш основной источник света достаточно мягкий, вам действительно нужен только один источник ».
Воздушное нападение
После того, как Нео и Тринити устроили хаос в вестибюле, дуэт поднимается на лифте на крышу, где они захватывают вертолет. «В вертолете Нео и Тринити спускаются вниз по стене здания и видят, как Морфеус пытают внутри одного из офисов», — уточняет Поуп.
«Так как весь вестибюль только что взорвали, в здании сработали спринклерные системы, и вода начала заполнять комнаты. У нас был полномасштабный вертолет, который управлял установкой, прикрепленной к пермам сцены; это Его можно было поднимать, опускать и парить. Когда трое агентов смотрят вверх, они видят вертолет, парящий перед огромным светом TransLight. Состоит из нескольких немного измененных снимков Сиднея — с исправленным на белый цвет небом — сделанным на заказ TransLight измеренные 190 футов на 40 футов.Опять же, мы должны были иметь возможность снимать со скоростью 300 кадров в секунду, поэтому при необходимости комплект и TransLight нужно было освещать до T11. У Рега была компьютерная программа, которая сообщала нам, сколько источников света нам понадобится для этого. Я думаю, у нас в здании было всего 12000 ампер ».
«Только для TransLight у нас было 200 5K Skypans с диммерами», — добавляет Гарсайд. «Вдобавок у нас было 500 банок Par на крыше — опять же, нацеленных через легкий парус из сетки — чтобы создать некоторую атмосферу над вертолетом.Мы также должны были осветить вертолет, поэтому у нас было четыре Dinos, проходящих через рамы из легкой сетки размером 12 на 12 футов, которые я поставил на ножничный подъемник, потому что вертолет был подвешен на высоте 20 футов над полом сцены. Наконец, у меня было еще пять динозавров, снабженных узконаправленными лампами [NSP] и установленных в перманентной завивке, чтобы освещать нам свет через окна здания. Окна, кстати, тоже были тонированы, поэтому, когда они были задутыми, создавалось ощущение, что свет заливает их, когда они разбиваются. Затем нам пришлось осветить комнату изнутри, что мы и сделали с помощью нескольких светильников Wall-O-Lites.С тех пор, как появились спринклеры, мы построили свои собственные корпуса для Wall-O-Lites: трубки Hydroflex Kino Flo, прикрепленные к подложке отражателя, чтобы сделать водонепроницаемые блоки с 8 и 4 рядами. Затем мы использовали эти единицы через слои легкой сетки ».
Вид на вертолет из офиса, где держат Морфеуса.«В качестве последнего элемента для освещения в этой сцене, — продолжает Поуп, — я хотел создать эффект солнечного света, пробегающего по головам актеров из-за вращающихся лопастей винта вертолета, даже если лопасти будут добавлены к сцене. позже с CG.Для этого у меня было два блока Lightning Strikes 70K, которые пропускались через прецизионный фейдер, чтобы мы могли контролировать количество мигающих стробоскопов в зависимости от конкретной частоты кадров камеры. Мы нацелили их на актеров сверху. Сначала мы попробовали устройства Unilux, но светильники Lightning Strikes были намного ярче.
«Поскольку Нео выбивает окна здания из мини-пистолета на борту вертолета, — объясняет Поуп, — люди [Брайан Кокс и Стив Куртли] должны были создать эффект от попадания пули, но они не смогли запор стекло, потому что мы могли бы видеть провода.Перед стеклом и над ним они установили сотни минометов, которые выбрасывали песок с такой силой, чтобы разбить окно по заданному образцу. Стены в комнате, как и люди, тоже были расшиты по той же схеме. Вода тогда должна была хлынуть из разбитых окон — и все сразу.
«Мы стреляли через плечо Киану из вертолета, — продолжает Поуп, — так что мы видели, как все это происходило прямо перед нами, когда он стрелял из мини-пушки. Это было невероятно сложно.Фактически, нам пришлось поставить его дважды, потому что с первого дубля мы могли видеть, как песок проходит через воздух, прежде чем он попадет в стекло. Чтобы скрыть это, мы отключили некоторые огни наверху — что было непросто, потому что нам все еще нужно было освещать фасад здания, как будто это было днем ».
Морфеус бежит, чтобы прыгнуть к вертолету. вдоль пола расположена система массивов камер «Bullet Time», позволяющая создавать экстремальные эффекты замедленной съемки.Когда окна здания выбиты, Морфеус совершает драматический прыжок к вертолету и свободе; его едва поймал Нео, который ныряет с вертолета вслед за своим падающим другом.Подвешенные тросом от теперь уже покалеченного вертолета, Нео и Морфеус несутся по зданиям в центре города, в то время как Тринити ищет крышу, чтобы безопасно высадить героев. «Большая часть этой работы была выполнена вторым подразделением с земли, а вертолетное подразделение — с дополнительной камеры-вертолета», — отмечает Поуп. «В некоторых ключевых кадрах Кэрри-Энн фактически научилась управлять вертолетом. В кадре, в котором Нео и Морфеус падают на крышу, большой каскадный подъемный кран был построен на самой высокой части многоуровневой крыши, примерно на 20 этажей выше. улица.Мы использовали кран, чтобы перебросить каскадеров на нижние уровни крыши ».
Как только Нео и Морфеус благополучно приземлились, вертолет теряет управление и ныряет в сторону здания. «Когда вертолет терпит крушение, — рассказывает Ларри, — мы видим, как он взрывается позади них почти сверхзвуковой волной, которая вылетает из окон здания — это похоже на замедленную съемку раскрывающегося цветка».
«Крушение вертолета было своего рода сложной сценой, в которой раскадровки неоценимы, — объясняет Поуп.«Ни один кадр в этом эпизоде не является простым кадром реальности. Многие фоновые кинофильмы и неподвижные изображения должны были быть сняты с вертолетов, установок для мытья окон и других зданий. Затем было возведено зеленое здание с цветным ключом в четверть масштаба — который был сделан из гофрированного стекла — люди разбивались по образцу «расширяющегося кольца», когда макет вертолета вбрасывался в здание на специально построенной стреле крана ».
Подземная драка
«После освобождения Морфеуса агенты преследуют троицу в метро», — объясняет Поуп.«Тем не менее, всем удается выбраться, кроме Нео. Именно здесь Нео и главный злодей, агент Смит [Хьюго Уивинг], проводят большую битву в решающей схватке».
Как и предыдущие наборы, метро нужно было освещать как для обычной, так и для скоростной фотосъемки. «Внутри станции платформа имела потолочные секции площадью 8 квадратных футов, в каждую из которых встроен люминесцентный светильник», — отмечает Гарсайд. «Над каждой из этих секций было 72 банок Par. Встроенные светильники на самом деле были полыми, и мы просто направили банки Par сквозь них, наклоняя их таким образом, чтобы освещение ощущалось как флуоресцентный свет.Когда мы снимали на нормальных скоростях, через каждое поддельное приспособление проходило около 12 банок Par, покрытых 1000H. Для высокоскоростной работы мы оснастили набор таким образом, чтобы каждую из секций потолка можно было поднять и заменить рамками из легкой сетки; увеличивая яркость, но не меняя так сильно качество света ».
«Поскольку наши наборы освещались попеременно с T2.8 или T11, — говорит Поуп, — все практические приборы должны были быть сконструированы таким образом, чтобы они могли поддерживать оба уровня освещения.Многие должны были быть специально изготовлены из термостойкой смолы. Кадры [нормальные и замедленные] не всегда идеально совпадают, но они достаточно близки, чтобы средний зритель не заметил никакой разницы. Когда вы долгое время работаете на Т2,8, а затем внезапно стреляете в Т11, легко ошибиться. При таком уровне освещенности вы должны доверять своему измерителю больше, чем своему глазу ».
Завтра ярче
Интересно, что 150 выставочных отпечатков Матрица были обработаны с помощью обновленного процесса «матриц» переноса красителя Technicolor.(См. «Soup du Jour» AC , ноябрь 1998 г.) Остальные 4350 отпечатков были отчеканены на новой ложе Kodak Vision.
Поуп только хвалит свою австралийскую команду: «Реджи, его команда и главный герой Рэй Браун и вся его команда невероятно усердно работали над этим фильмом. Они были твердыми, как скала, и справились с любой задачей. Когда я впервые выложил все, об освещении и физических требованиях для этого фильма они сказали: «Ты шутишь!» Но когда они поняли, что это не так, они сказали: «Ну ладно, давай сделаем это!» »
Семья Вачовски с одинаковым энтузиазмом относится к своему оператору-постановщику, заявляя: «Билл Поуп — из тех кинематографистов, которым действительно нравится использовать черный цвет на экране.В глубоких темных тонах есть определенная [композиционная] сила. Но помимо этого Биллу нравится перемещать камеру, что нам очень нравится. Эти два элемента действительно хорошо вписываются в то, как мы хотели снять наш фильм ».
Поуп впоследствии сфотографировал два сиквела Matrix , а также такие фильмы, как Team America: World Police, Scott Pilgrim vs. the World, The World’s End, The Jungle Book и Baby Driver.
Матрица была выбрана в качестве одного из фильмов ASC 100 Milestone в кинематографии ХХ века .