
Динамический диапазон приемника: Динамический диапазон rtl-sdr • dernasherbrezon
Динамический диапазон rtl-sdr • dernasherbrezon
Ниже я сделал перевод одной замечательной заметки Mile Kokotov о динамическом диапазоне rtl-sdr. Это очень важный показатель, которым я заинтересовался и решил разобраться. Возможно кому-нибудь это тоже будет полезно.
Большинство людей думает, что наиболее важной характеристикой радиоприёмника является чувствительность, но это не совсем так. Вообще, спроектировать и произвести приёмник с высокой чувствительностью не проблема. Гораздо сложнее для инженеров спроектировать приёмник с большим динамическим диапазоном, который смог бы принимать как очень слабые сигналы, так и очень сильные одновременно.
Перегрузка приёмника означает то, что он больше не является линейным и сам по себе начинает генерировать сигналы, добавляя шум. Очень сильные сигналы на входе приёмника делают его менее чувствительным, таким образом он больше не может принимать слабые сигналы до тех пор, пока существует сильный сигнал рядом. Не стоит забывать, что на вход приёмнику приходят все сигналы, несмотря на то, что нам нужен только один конкретный. Соответственно, чем шире полоса приёма, тем больше нужен динамический диапазон для того, чтобы избержать перегрузки.
Качество sdr приёмника зависит от множества факторов. И одним из наиболее важных параметров, которые напрямую влияют на качество sdr приёмника, является его динамический диапозон.
В общем случае, динамический диапазон — это отношение самого сильного сигнала, который можно принять, к самому слабому.
Для цифровых сигналов динамический диапазон определяется количеством битов в сэмпле: самый сильный сигнал использует все возможные биты, самый слабый — только один бит.
В sdr уровень аналогового сигнала, поступающего в АЦП, может быть отрегулирован (вручную или с помощью АРУ) для того, чтобы максимально эффективно использовать доступный динамический диапазон.
Если аналоговый сигнал слишком сильный, то его нельзя представить соответствующими значениями битов.
Где n — количество бит, SQNR — динамический диапазон.
Согласно формуле динамический диапазон АЦП 8 бит равен ~50dB, 12 бит 74dB и 16 бит 98dB.
Почему же динамический диапазон важен для SDR?
Кто-то может подумать, что достаточно иметь АРУ (автоматическая регулировка усиления), которая поддерживает входной сигнал на необоходимом уровне и, поэтому не нужен большой динамический диапазон. Это может сработать, но не стоит забывать что sdr приёмник получает сигнал на АЦП гораздо большей ширины, нежели необходимо. Дополнительная ширина сигнала позволяет получить спектограмму всей доступной полосы частот, но это так же значит, что на АЦП попадает множество энергии в том числе и от нежелательных частот. Эти частоты могут быть достаточно сильными по сравнению с сигналом, который необходимо получить.
В таком случае, уровень усиления должен быть равен суммарной мощности всего радио сигнала поступающего на АЦП. Это решит проблему “слишком сильного” сигнала, при этом самый слабый сигнал будет определяться динамическим диапазоном. Тем не менее, при большом динамическом диапазоне шум квантирования уменьшается, позволяя принимать слабые узкополосные сигналы.
Улучшить качество сигнала можно еще одним способом — используя более узкий аналоговый фильтр. Это позволит сократить входную мощность и позволит усилить сигнал без отсечения. Однако, это работает если sdr имеет встроенный настраевыемый фильтр.
В крайнем случае можно использовать фильтр, равный полосе принимаемого сигнала. Недостатком этого метода является то, что нельзя будет увидеть полный спектр.
Помимо количества бит АЦП, динамический диапазон может зависеть от шума и фантомных сигналов.
Если в приёмнике нет предусилителя, то его динамический диапазон ограничен динамическим диапазоном АЦП. Но если он есть, то динамический диапазон ограничен либо АЦП, либо предусилителем. При этом шум усилителя задаёт минимальный сигнал, который может быть оцифрован.
Динамический диапазон системы должен быть больше соотношения сигнал/шум. Если же он меньше, то входящий сигнал будет искажён приёмником и узким местом такой системы будет мощность усилителя.
Фантомные сигналы намного более опасны, чем шум. Они имеют гораздо большую амплитуду нежели шум и она не зависит от выбранной полосы пропускания. Эти сигналы появляются в результате нелинейности АЦП. SFDR для АЦП определяется как отношение RMS амлитуды сигнала к RMS амлитуды самого большего фантомного сигнала. SFDR представлен на картинке ниже:
Есть некоторое заблуждение связанное с динамическим диапазоном широкополосных АЦП. Оно заключается в том, что АЦП работающее на 20МГц с динамическим диапазоном 74dB не может быть лучше радиоприёмника с динамическим диапазоном 85dB. Проблема в том, что сравнивается белое с пушистым. Нельзя говорить о динамическом диапазоне не упоминая ширину канала. Для радиолюбительского радио — это ширина приёмника. Она может быть 2400Гц для SSB или 500Гц для морзе.
На самом деле в некоторых sdr приёмниках используется децимация. Процесс децимации заключается в том, что цифровой сигнал, полученный с гораздо большей частотой дискретизации, уменьшается до интересующей частоты дискретизации. В результате динамический диапазон увеличивается за счёт “усиления обработки”. Усиление достигается за счёт того, что удаляется шум вне интересующей полосы частот, тем самым увеличивая соотношение сигнал/шум.
Например, Если взять 12-битный АЦП, работающий с частотой дискретизации 10МГц, то с помощью децимации можно увеличивать динамический диапазон на 3dB при каждом увеличении децимации в 2 раза:
| Децимация | alias-free bandwidth (Mhz) | Увеличение (dB) | Динамический диапазон (dB) |
|---|---|---|---|
| 0 | 8 | 0 | 74 |
| 2 | 4 | 3 | 77 |
| 4 | 2 | 6 | 80 |
| 8 | 1 | 9 | 83 |
| 16 | 0. 5 5 | 12 | 86 |
| 32 | 0.25 | 15 | 89 |
| 64 | 0.125 | 18 | 92 |
Цифровые радиоприемники. Шумы. Динамический диапазон
В статье представлены результаты разработки и исследования радиоприемников, построенных по технологии SDR (программно определяемое радио) с прямым аналого-цифровым преобразованием на АЦП LTC 2208 и с квадратурным преобразованием на нулевую частоту (AD 9361, RN 2483 в режиме LoRa). Приведены сравнительные характеристики по пороговой чувствительности и динамическому диапазону. Экспериментально показаны возможности и сложности построения приемников на основе прямого аналого-цифрового преобразования.
Целесообразность и сложность построения цифровых радиоприемников
Развитие технологий цифровой обработки сигналов и создания быстродействующих цифровых устройств коренным образом изменило структуру современных радиоприемных устройств. Появились большие возможности по обработке сигналов, по автоматизации управления приемниками [1, 2]. Сложным остался вопрос стыковки аналогового тракта системы связи с устройствами цифровой обработки.
Критическим параметром современных радиоприемных устройств, особенно работающих в коротковолновом диапазоне, является линейность входных высокочастотных цепей. Современный эфир плотно занят, и приемнику приходится работать при большом количестве внеполосных помех высокого уровня. Из-за нелинейности возникают эффекты блокирования и интермодуляционных искажений, которые не позволяют качественно принимать сигналы. Использование прямого аналого-цифрового преобразования высокочастотных сигналов с помощью современных АЦП позволяет в значительной степени решить описанную задачу.
Порог чувствительности приемника с прямым АЦП высокочастотных сигналов
В настоящей работе проведена разработка и экспериментальное исследование характеристик радиоприемника коротковолнового диапазона с использованием прямого аналого-цифрового преобразования на 16‑разрядном АЦП LTC 2208. Получены хорошие характеристики. Но обнаружились и трудности.
Получены хорошие характеристики. Но обнаружились и трудности.
Экспериментально показано, что с использованием передискретизации (oversampling) [1, 3] удается обеспечить аналого-цифровое преобразование слабых сигналов с амплитудой много меньше минимального интервала квантования АЦП (34,3 мкВ для LTC 2208) в смеси с более мощными внеполосными колебаниями. При частоте дискретизации 130 МГц обеспечивается реальная чувствительность приемника в полосе сигнала 3,1 кГц (прием однополосных сигналов) UC = 2,2 мкВ (при отношении сигнал/шум на выходе 10 дБ, СКО шумов АЦП 0,7 мкВ). На рисунке 1 показан результат преобразования слабого сигнала. Рисунки 1–3 представляют собой снимки экрана анализатора спектра – приложения к демонстрационной плате АЦП LTC 2208.
Коэффициент шума приемника при описанных условиях составляет 28,9 дБ (при сопротивлении источника сигнала 50 Ом). Высокий коэффициент шума является существенным недостатком данного метода построения приемников.
Вторым недостатком является существование дополнительных помех – результата неидеальности АЦП. Коэффициент шума удается понизить путем включения согласующего трансформатора на входе АЦП. Экспериментально проверено, что коэффициент трансформации 1:2 обеспечивает уменьшение коэффициента шума на 6 дБ.
Уменьшить уровень помех в АЦП LTC2208 можно с помощью режима Dither. В нем к входному аналоговому сигналу добавляется шум, созданный специальным цифровым генератором шума. На выходе АЦП осуществляется вычитание цифрового шума из полученного кода. Этот режим позволяет уменьшить паразитные составляющие на 20 и более дБ.
Применение трансформатора на входе, однако, нарушает работу алгоритма компенсации добавочного шума в режиме Dither. В итоге коэффициент шума АЦП не уменьшается из-за трансформатора. На рисунках 2–3 иллюстрируется влияние трансформатора.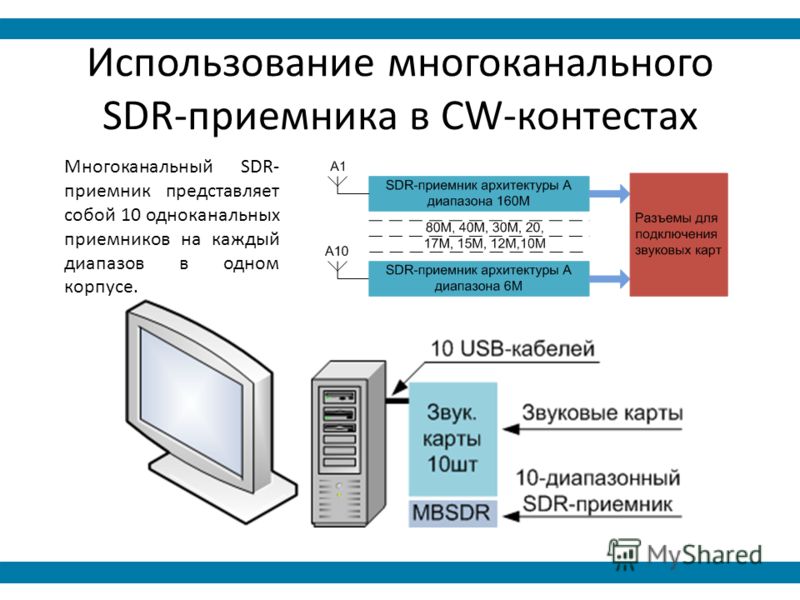
Рис. 2. Результат преобразования гармонического сигнала: f = 15,1 МГц; U = 1 мВ. Режим Dither включенРис. 3. Результат преобразования гармонического сигнала: f = 15,1 МГц; U = 1 мВ. Режим Dither выключен
Динамический диапазон приемника с прямым АЦП высокочастотных сигналов
Главным достоинством применения прямого АЦП входных высокочастотных сигналов при построении радиоприемников является широкий динамический диапазон, позволяющий принимать слабые сигналы на фоне мощных помех. Несмотря на то, что многоразрядные АЦП обладают высоким уровнем собственных шумов (коэффициент шума 28,9 дБ), динамический диапазон приемников с прямым АЦП сигналов оказывается значительно шире, чем при других схемах преобразования сигналов.
Эксперименты, проведенные в настоящей работе, обнаружили особенность собственных шумов АЦП. Она заключается в том, что мощность шумов не возрастает с увеличением частоты дискретизации. Подобно шумам квантования [1], спектральная плотность мощности собственных шумов АЦП уменьшается с увеличением частоты дискретизации (с расширением полосы Найквиста).
Экспериментально показано, что изменение частоты дискретизации с 60 до 180 МГц приводит к уменьшению порога чувствительности (определенного в полосе 3,1 кГц) примерно на 10 дБ.
Динамический диапазон АЦП, определенный на основании данных из технического описания SNR = 78 дБ, также равен 78 дБ (в полосе Найквиста 65 МГц) [4]. Пересчитанный к полосе 3,1 кГц, динамический диапазон составляет 111 дБ (при минимальном отношению сигнал/шум равном 10 дБ).
Широкий динамический диапазон обеспечивает работоспособность при воздействии большой блокирующей помехи. Динамический диапазон по блокированию составляет 111 дБ.
Чтобы подчеркнуть достоинства приемника с прямым АЦП сигналов, в данной работе были проведены измерения динамического диапазона по блокированию приемных устройств, входящих в состав трансиверов AD 9361 и RN 2483. Приемники в обоих трансиверах построены с использованием аналоговых квадратурных преобразователей на нулевую промежуточную частоту с последующим АЦП на низкой частоте.
Приемники в обоих трансиверах построены с использованием аналоговых квадратурных преобразователей на нулевую промежуточную частоту с последующим АЦП на низкой частоте.
Оба приемника выдерживают блокирующую помеху на 70 дБ, превышающую полезный сигнал при существенной расстройке относительно полосы пропускания основного тракта. При большем уровне помехи начинает ухудшаться порог чувствительности. Устойчивость приемника с прямым АЦП сигналов к воздействию блокирующей помехи выше на 40 дБ.
Вторым достоинством приемника на АЦП LTC2208 является низкий уровень интермодуляционных искажений 2‑го и 3‑го порядков. Экспериментально установлено, что уровень интермодуляционных составляющих при максимальном значении амплитуд двух гармонических колебаний около 0,5 В не превышает –110 дБ. Оценка значения точки пересечения 3‑го порядка показывает IIP3 = 60 дБм. Для сравнения, эта величина у приемников трансиверов AD 9361 и RN 2483, соответственно, равна –18 и –11 дБм (данные из техописаний).
Достоинством аналогового преобразования сигналов в названных приемниках является более низкий коэффициент шума – 4…6 дБ.
Выводы
Представлены результаты экспериментального исследования приемника с прямым аналого-цифровым преобразованием, предназначенного для работы в коротковолновом диапазоне и в условиях мощных помех.
Эксперименты показали реализуемость основного достоинства этого метода приема сигналов – большого динамического диапазона. Обнаружены закономерности и проблемы в достижении основных характеристик.
Литература
- Ричард Лайонс. Цифровая обработка сигналов. 2‑е изд. 2006.
- К. Пронин. Проектирование, оптимизация и моделирование SDR//Электронные компоненты. 2012. № 2.
- Уолт Кестер (Walt Kester). Входной шум АЦП: хороший, плохой и опасный. Хорошо ли, когда его нет? Компоненты и технологии. 2008. № 9.
- Data sheet LTC2208, 16‑Bit, 130 Msps ADC//LT 0909 REV C, printed in USA. Linear Technology Corporation.


Компоненты ADI для приемников связной радиоаппаратуры
До недавнего времени подавляющее большинство схем приемников связных устройств создавалось по супергетеродинной схеме. Схема супергетеродинного приемника с квадратурным преобразованием сигнала приведена на рис. 1. Ее достоинствами являются большой динамический диапазон и прекрасная избирательность. К недостаткам данной схемы относятся большое количество компонентов, значительное энергопотребление, невозможность работы с сигналами с различными параметрами.
Рис. 1. Супергетеродинный приемник с квадратурным преобразованием сигнала
Одним из самых предпочтительных вариантов уменьшения размеров конструкции приемника или приемопередающего устройства в целом является увеличение количества реализованных цифровых функций на единицу площади кристалла. Достичь сравнительной степени интеграции аналоговых функций (компонентов) при современном уровне технологии производства полупроводников не представляется возможным. В данном случае схема содержит каскад усиления и фильтрации радиочастоты, смеситель, схему усиления, фильтрации и согласования сигнала основной частоты и аналого-цифровой преобразователь (для каждого из каналов).
В настоящее время современный аналого-цифровой преобразователь выполнен по КМОП-технологии, вследствие чего он стоит недорого и имеет малое энергопотребление. Современные АЦП достигли скорости преобразования в несколько гигагерц, если же рассматривать микросхемы с приемлемой для массовых коммерческих и военных приложений стоимостью, то можно говорить о преобразователях со скоростью работыдо 250 MSPS и разрядностью до 16 бит.
Рис. 2. Приемник с преобразованием сигнала на промежуточной частоте
Сложность заключается в том, чтобы интегрировать фильтр (как правило, в подобных схемах применяются фильтры на ПАВ), усилители и смеситель, причем сделать это, чрезмерно не увеличивая габариты кристалла, энергопотребление и коммерческую стоимость. Отказаться от полосового фильтрана ПАВ (и от фильтра подавления зеркального канала) можно, изменив архитектуру приемника. Схема, называемая схемой с преобразованием на нулевую промежуточную частоту (или схема прямого преобразования), приведенана рис. 2. В данной схеме сигнал преобразуется непосредственно в область основной частоты (с разложением на квадратурные составляющие), при этом необходимость в фильтре и усилителе промежуточной частоты отпадает. Параметры избирательности схемы определяются характеристиками фильтров нижней частоты, следующих за смесителями. В отличие от фильтров на ПАВ, данные фильтры нижних частот можно сделать перестраиваемыми, с изменяемой частотой среза и крутизной характеристики. Отметим, что данные фильтры могут быть интегрированными в микросхему усилителя. В данном случае стоит упомянуть серию ADRF651x производства Analog Devices Inc. [1]. Наиболее значительными характеристиками обладает ADRF6518, который представляет собой согласованную пару полностью дифференциальных, обладающих малым шумом и низкими искажениями усилителей с переменным коэффициентом усиления и программируемых фильтров. Структура микросхемы представлена на рис. 3. Оба канала усилителей и фильтров подавляют сильные внеполосные помехи, усиливая полезный сигнал в требуемой полосе частот, что позволяет смягчить требования к ширине полосы и динамическому диапазону аналого-цифровых преобразователей.
Отказаться от полосового фильтрана ПАВ (и от фильтра подавления зеркального канала) можно, изменив архитектуру приемника. Схема, называемая схемой с преобразованием на нулевую промежуточную частоту (или схема прямого преобразования), приведенана рис. 2. В данной схеме сигнал преобразуется непосредственно в область основной частоты (с разложением на квадратурные составляющие), при этом необходимость в фильтре и усилителе промежуточной частоты отпадает. Параметры избирательности схемы определяются характеристиками фильтров нижней частоты, следующих за смесителями. В отличие от фильтров на ПАВ, данные фильтры нижних частот можно сделать перестраиваемыми, с изменяемой частотой среза и крутизной характеристики. Отметим, что данные фильтры могут быть интегрированными в микросхему усилителя. В данном случае стоит упомянуть серию ADRF651x производства Analog Devices Inc. [1]. Наиболее значительными характеристиками обладает ADRF6518, который представляет собой согласованную пару полностью дифференциальных, обладающих малым шумом и низкими искажениями усилителей с переменным коэффициентом усиления и программируемых фильтров. Структура микросхемы представлена на рис. 3. Оба канала усилителей и фильтров подавляют сильные внеполосные помехи, усиливая полезный сигнал в требуемой полосе частот, что позволяет смягчить требования к ширине полосы и динамическому диапазону аналого-цифровых преобразователей.
Рис. 3. Внутренняя структура программируемого усилителя со встроенными фильтрами ADRF6518
Усилители с переменным коэффициентом усиления, предшествующие фильтрам, обеспечивают непрерывную регулировку в диапазоне 24 дБ с возможностью установки фиксированного коэффициента усиления 9, 12 или 15 дБ. Фильтры имеют шестиполюсную характеристику Баттерворта с частотой среза по уровню 0,5 дБ, изменяемой в диапазоне 1–63 МГц с шагом 1 МГц. При необходимости работы в полосе более 63 МГц фильтры можно полностью исключить из сигнальной цепочки; при этом ширина полосы по уровню –3 дБ расширяется до 1100 МГц.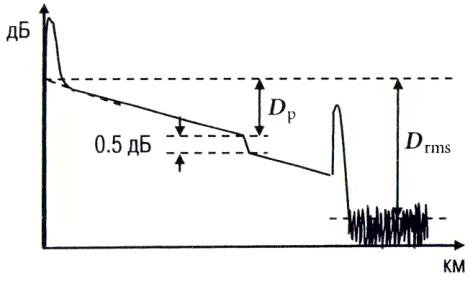 Уровень пикового сигнала на входах фильтров может контролироваться при помощи широкополосного пикового детектора. Усилители с переменным коэффициентом усиления, которые следуют за фильтрами, обеспечивают непрерывную регулировку в диапазоне 24 дБ с возможностью установки фиксированного коэффициента усиления 12, 15, 18 или 21 дБ. Выходные буферы дают дополнительный коэффициент усиления 3 или 9 дБ, обеспечивают дифференциальный выходной импеданс менее 10 Ом и способны поддерживать уровень гармонических искажений третьего порядка (HD3) более 65 дБн при выдаче сигнала с размахом 1,5 В в нагрузку 400 Ом.
Уровень пикового сигнала на входах фильтров может контролироваться при помощи широкополосного пикового детектора. Усилители с переменным коэффициентом усиления, которые следуют за фильтрами, обеспечивают непрерывную регулировку в диапазоне 24 дБ с возможностью установки фиксированного коэффициента усиления 12, 15, 18 или 21 дБ. Выходные буферы дают дополнительный коэффициент усиления 3 или 9 дБ, обеспечивают дифференциальный выходной импеданс менее 10 Ом и способны поддерживать уровень гармонических искажений третьего порядка (HD3) более 65 дБн при выдаче сигнала с размахом 1,5 В в нагрузку 400 Ом.
Важно отметить, что приемники подобной схемы имеют очень широкий диапазон рабочих частот. Радиотрансиверы, реализованные по схеме с преобразованием на нулевую комплексную промежуточную частоту, могут работать в диапазоне от нескольких десятков мегагерц до 6 и более гигагерц, причем достигается это изменением частоты гетеродина.
Подобная схема, при условии использования в ней высокопроизводительного аналого-цифрового преобразователя (АЦП), дает возможность создавать устройства, работающие в широком диапазоне частот с сигналами с различной шириной спектра (или канала), причем настройка системы будет осуществляться программным способом. Говоря иными словами, речь идет о программно-определяемой радиосистеме (еще употребляется термин программно-конфигурируемое радио), изменение рабочих параметров которой не требует изменения характеристик аналоговых (внешних усилителей, фильтров) компонентов. Особенностью программно-определяемых радиосистем является дискретизация сигнала на радиочастоте либо на промежуточной частоте.
В качестве примера рассмотрим микросхему AD6676 (рис. 4) [2], которая является интегрированной схемой приемника, осуществляющего аналого-цифровое преобразование сигналов с полосой 20–160 МГц, центрированных относительно ПЧ в диапазоне 70–450 МГц. Микросхема AD6676 подключается к радиочастотному усилителю или смесителю, преобразующему сигнал радиочастоты в сигнал промежуточной частоты.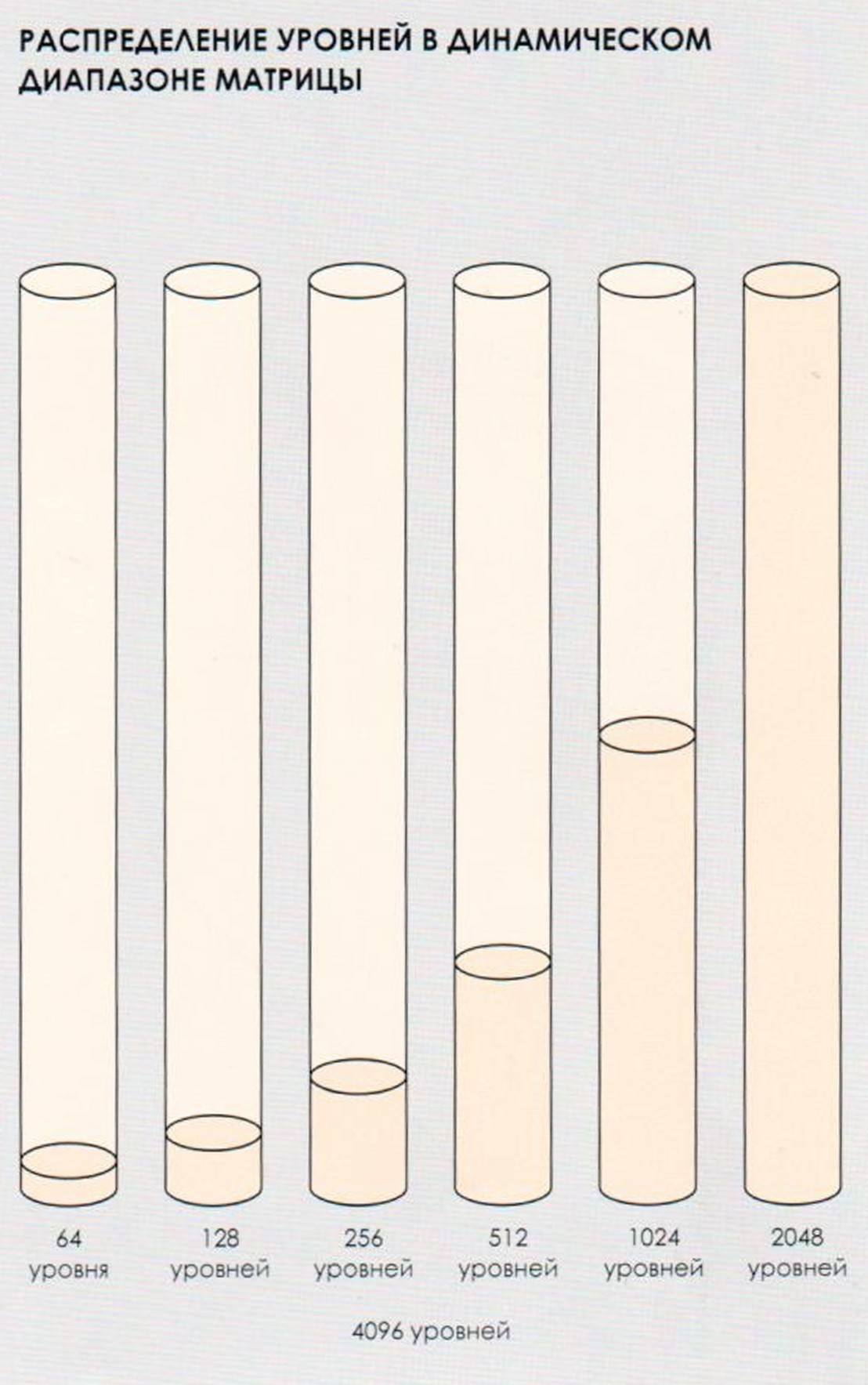
Рис. 4. Внутренняя структура приемника промежуточной частоты AD6676
Ядром микросхемы является перестраиваемый полосовой ∑-∆ АЦП с высоким коэффициентом избыточной дискретизации, что позволяет достигнуть больших значений коэффициента подавления соседнего канала, что,в свою очередь, избавляет от необходимости применения внешних фильтров, несмотря на то, что данная схема является схемой дискретизации на промежуточной частоте. Кроме того, данная структура увеличивает динамический диапазон приемника, благодаря чему уменьшается количество усилительных каскадов. Отметим, что динамический диапазон AD6676 позволяет производить дискретизацию сигнала во второй зоне Найквиста.
Особенность сигма-дельта архитектуры с полосовой фильтрацией АЦП AD6676 позволяет осуществлять изменение ширины полосы пропускания. Это, а также способность менять частоту дискретизации, дает возможность настройки значения спектральной плотности шума. Увеличив коэффициент передискретизации (увеличив частоту дискретизации) и уменьшив полосу пропускания, можно уменьшить спектральную плотность шума (примеры приведены на рис. 5).Центральная частота сигнала промежуточной частоты, ширина полосы сигнала и частота дискретизации в AD6676 задаются программно.
Рис. 5. Спектральная плотность шума AD6676 при различных значениях ширины полосы и коэффициентах передискретизации
Интегрированный квадратурный цифровой преобразователь с понижением частоты (QDDC) с последующими выбираемыми фильтрами прореживания уменьшает требуемую частоту дискретизации комплексных 16‑разрядных данных до значений в диапазоне 62,5–266,7 MSPS. Квадратурные выходные данные передаются через интерфейс JESD204B, поддерживающий конфигурацию с одной или двумя линиями данных и быстродействие до 5,333 Гбит/с
АЦП работает с тактовой частотой в диапазоне 2,0–3,2 ГГц, обеспечивая исключительный динамический диапазон, предотвращая возникновение спектральных наложений и поддерживая неравномерность в полосе пропускания в пределах 1 дБ при пиковом выбросе вне полосы до 0,5 дБ. Передаточная функция сигма-дельта модулятора АЦП определяет частотную характеристику аналогового входа. Традиционные высокоскоростные конвейерные АЦП обладают частотной характеристикой, аналогичной фильтру нижних частот, параметры которого задаются свойствами усилителя выборки и хранения и входного буфера. В AD6676 используется перестраиваемый полосовой фильтр 6‑го порядка. Интегрированный цифровой пиковый детектор позволяет контролировать уровень мгновенной мощности сигнала. Блок АРУ включает в себя шаговый аттенюатор с диапазоном 27 дБ и шагом регулировки 1 дБ.
Передаточная функция сигма-дельта модулятора АЦП определяет частотную характеристику аналогового входа. Традиционные высокоскоростные конвейерные АЦП обладают частотной характеристикой, аналогичной фильтру нижних частот, параметры которого задаются свойствами усилителя выборки и хранения и входного буфера. В AD6676 используется перестраиваемый полосовой фильтр 6‑го порядка. Интегрированный цифровой пиковый детектор позволяет контролировать уровень мгновенной мощности сигнала. Блок АРУ включает в себя шаговый аттенюатор с диапазоном 27 дБ и шагом регулировки 1 дБ.
Сигнал тактовой частоты приемника может формироваться при помощи внутреннего умножителя частоты на схеме ФАПЧ или поступать от внешнего источника дифференциального тактового сигнала ВЧ. Конфигурирование внутренних параметров устройства под требования различных приложений осуществляется через совместимый с SPI интерфейс.
Цифровая обработка сигналов в аналого-цифровых преобразователях
Одна из основных причин, почему стало технически возможным и экономически оправданным широкое применение концепции программно-конфигурируемого радио, — реализация цифровой обработки сигналов на высокопроизводительных ПЛИС (в общем случае) или ASIC (при массовом производстве серийного изделия, когда целесообразны затраты на разработку специализированного кристалла). Как правило, ASIC более предпочтительны с точки зрения энергопотребления и производительности. Микросхемы программируемой логики обладают такими преимуществами, как распространенность и возможность многократного программирования.
Другой причиной, сделавшей возможной реализацию радиоприемных устройств с прекрасными техническими параметрами и при этом обладающих малыми габаритами и скромным энергопотреблением, стала способность современных высокоскоростных АЦП выполнять функции цифровой обработки оцифрованного сигнала. Это уменьшает нагрузку на процессор (или ПЛИС) и упрощает процесс разработки.
Ранее в схемах приемников применялось преобразование частоты вниз с помощью аналоговых смесителей и цифровых преобразователей частоты с понижением, чтобы последовательно привести сигнал к области основной частоты (baseband) для последующей обработки. В настоящее время получает распространение иное решение — оцифровка сигнала в области высоких частот аналого-цифровыми преобразователями со скоростью выборки в несколько сотен миллионов в секунду и более, с последующим преобразованием сигнала с помощью встроенных цифровых преобразователей с понижением частоты.
В настоящее время получает распространение иное решение — оцифровка сигнала в области высоких частот аналого-цифровыми преобразователями со скоростью выборки в несколько сотен миллионов в секунду и более, с последующим преобразованием сигнала с помощью встроенных цифровых преобразователей с понижением частоты.
Примером такого решения может быть приемник промежуточной частоты AD6674 (рис. 6) [3]. Данное решение является интегрированной схемой приемника, обеспечивающей оцифровку сигналов с шириной спектра до 385 МГц. Приемник AD6674 имеет в основе два 14‑разрядных конвейерных аналого-цифровых преобразователя, осуществляющих преобразование сигналов со скоростью до 1 GSPS (микросхема выпускается в трех вариантах, различающихся скоростью работы — 500, 750 и 1 GSPS соответственно.)
Рис. 6. Внутренняя структура широкополосного приемника AD6674
Для последующей цифровой обработки сигнала используются четыре широкополосных цифровых преобразователя с понижением частоты (DDC), блок изменения параметров квантования с перераспределением спектра шума (NSR) и блок измерения параметров с переменным динамическим диапазоном (VDR).
Цифровые выходы АЦП соединены с четырьмя преобразователями частоты (DDC) через перекрестный мультиплексор. Блок изменения параметров квантования с перераспределением спектра шума (NSR) повышает отношение сигнал–шум в ограниченной полосе частот внутри полосы Найквиста. Кроме того, к выходу каждого АЦП подключен блок VDR, который позволяет получить максимальный динамический диапазон для заданного типа входных сигналов. Компонент также включает в себя несколько блоков, упрощающих реализацию функции АРУ в приемниках систем связи: программируемый пороговый детектор, который следит за уровнем мощности поступающего сигнала, и блок измерения параметров сигнала, который обеспечивает дополнительную информацию об оцифровываемом сигнале. Вывод данных осуществляется через последовательный высокоскоростной интерфейс JESD204B, который может быть сконфигурирован для работы с двумя или четырьмя линиями данных.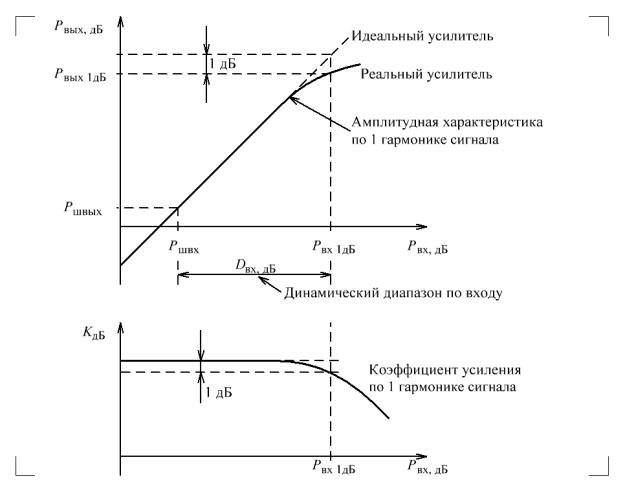
Концепция использования высокоскоростных АЦП для преобразования сигнала с последующим прореживанием заключается в применении более простых в реализации входных аналоговых цепей и использовании цифровых блоков АЦП для выполнения множества функций обработки сигнала.
Цифровой преобразователь с понижением частоты (DDC, digital downconverter) выполняет задачи преобразования частоты вниз, фильтрации и прореживания выходных данных с целью уменьшить нагрузку на ПЛИС или ASIC. Данные операции могут выполняться как с комплексными, так и с действительными сигналами. В общем случае это происходит следующим образом: схема на основе генератора с числовым управлением осуществляет выделение сигнала и переносит его в область нулевой частоты. Затем происходит фильтрация сигнала, позволяющая удалить нежелательные спектральные составляющие и прореживание выходных данных.
Таким образом, современные АЦП, несмотря на существенно большую скорость выборки по сравнению с АЦП предыдущего поколения, могут иметь сопоставимую или даже меньшую скорость вывода данных, что позволяет использовать доступные микросхемы цифровой обработки сигналов.
Также следует упомянуть еще одну микросхему, предназначенную для построения широкополосной аппаратуры связи. Это AD6679 (рис. 7) [4], которая, как и AD6674, относится к классу приемников промежуточной частоты. Микросхема способна оцифровывать сигналы с шириной полосы до 135 МГц. Основу микросхемы составляют два 14‑разрядных аналого-цифровых преобразователя с быстродействием 500 MSPS и блоки последующей цифровой обработки сигналов: четыре широкополосных преобразователя с понижением частоты, блок изменения параметров квантования с перераспределением спектральной плотности шума и блок мониторинга значения сигнала с переменным динамическим диапазоном.
Рис. 7. Внутренняя структура широкополосного приемника AD6679
Микросхема AD6679 предназначена для использования в системах широкополосной связи с аналоговыми сигналами в полосе до 2 ГГц и оптимизирована для поддержания широкой полосы входного каскада, высокой частоты дискретизации, превосходной линейности и низкой потребляемой мощности. Аналоговые входы микросхемы имеют перестраиваемый диапазон 1,46–2,06 В, сами ядра АЦП построены на базе многокаскадной, дифференциальной конвейерной архитектуры с интегрированной логикой исправления ошибок в выходном коде, и каждое из них соединено внутри микросхемы с опциональными блоками цифровой обработки сигналов, например блоком NSR. Интегрированная схема NSR позволяет повысить отношение сигнал–шум в ограниченной полосе частот внутри полосы Найквиста.
Аналоговые входы микросхемы имеют перестраиваемый диапазон 1,46–2,06 В, сами ядра АЦП построены на базе многокаскадной, дифференциальной конвейерной архитектуры с интегрированной логикой исправления ошибок в выходном коде, и каждое из них соединено внутри микросхемы с опциональными блоками цифровой обработки сигналов, например блоком NSR. Интегрированная схема NSR позволяет повысить отношение сигнал–шум в ограниченной полосе частот внутри полосы Найквиста.
Существенным отличием AD6679 от других высокоскоростных АЦП является вывод данных через параллельный DDR LVDS-интерфейс.
Выводы
Рассмотрев некоторые решения для создания схем радиоприемных устройств, выпущенных в последнее время, можно сделать некоторые выводы. Современные микросхемы аналого-цифрового преобразования и первичной цифровой обработки сигналов позволяют создавать приемники, работающие в очень широком диапазоне частот с сигналами различных стандартов. Это обеспечивается использованием схемы прямого преобразования и такими особенностями микросхем–приемников ПЧ, как большой динамический диапазон, широкий частотный диапазон аналогового входа, встроенные функции цифровой обработки сигнала с возможностью их настройки путем программирования. Реализация приемников по схеме с преобразованием сигнала на промежуточной частоте позволяет уменьшить количество элементов схемы, уменьшить габариты, энергопотребление и зачастую снизить стоимость решения в целом.
5.1.2 Приемники для тестирования — Электронный учебно-методический комплекс по ТМ и О ЦВОСП
Тестирование компонентов систем WDM практически всегда связано с определением длины волны и чувствительности устройства к потерям. Поэтому измерительная установка обычно включает либо систему детектирования заданных длин волн для широкополосного источника, либо широкополосную систему детектирования сперестраиваемым лазерным источником.
Требования,
предъявляемые к приемникам в задачах тестирования, аналогичны требованиям к
источникам. Спектральная характеристика широкополосного приемника излучения
должна быть однородной, отклик приемника − линейным в максимально возможном
динамическом диапазоне, а вносимый при измерении уровень шумов – минимальным.
Желательно также, чтобы поляризационная чувствительность была как можно
меньше.
Спектральная характеристика широкополосного приемника излучения
должна быть однородной, отклик приемника − линейным в максимально возможном
динамическом диапазоне, а вносимый при измерении уровень шумов – минимальным.
Желательно также, чтобы поляризационная чувствительность была как можно
меньше.
Измерители мощности излучения. В широкополосных оптических измерителях мощности чаще всего используются фотодиоды, имеющие высокую спектральную чувствительность в стандартном диапазонедлин волн. При этом могут использоваться сменные модули для переключения зон
приема. Они имеют гладкую и достаточно равномерную зависимость отклика от длины волны (в особенности фотодетекторы на основе InGaAs). Для обеспечения высокой точности измерений на произвольной длине волны фотодиоды обычно калибруют.
Измерители мощности (особенно модели с термоэлектрическими охладителями) имеют высокую стабильность и динамический диапазон, необходимый для большинства случаев измерения потерь, а также малую чувствительность к поляризации.
Анализаторы оптического спектра. Существуют разные способы выделения длин волн, которые используются для анализа оптического спектра.
В основе первого способа лежит интерференция двух пучков входного излучения. Эти пучки проходят по разным оптическим плечам интерферометра Майкельсона (фиксированной и переменной длины), и интенсивность света на выходе интерферометра меняется из-за перемещения зеркала. Попадая далее на фотодетектор, свет преобразуется в электрический сигнал, анализ которого с помощью быстрого преобразования Фурье (БПФ) позволяет получить спектр исходного сигнала (Рис. 5.3 а).
В
другом подходе (Рис. 5.3, b) используется дисперсионная решетка, отражающая
лучипод разными углами в зависимости от длины волны. При повороте решетки
происходит сканирование всех длин волн, присутствующих в спектре входного
сигнала, через выходную щель прибора.
Рисунок 5.3 a. В интерферометрическом методе для интерференции двух пучков света используется перемещаемое зеркало.
Рисунок 5.3. b. Вращающаяся дисперсионная решетка отражает на зеркало излучение с разными длинами волны в зависимости от угла поворота
Рисунок 5.3 c. Фиксированная решетка разделяет входной пучок на спектральные составляющие, которые затем попадают на детекторы
Для увеличения разрешения используется двойной проход оптического пучка через систему.
Третий способ (рис.5.3 c) аналогичен только что рассмотренному, но в данной конструкции решетка закреплена. Отраженные решеткой спектральные составляющие входного пучка распределяются по линейке отдельных фотодетекторов (или попадают на одиночный перемещаемый фотодетектор).
Отметим важнейшие характеристики анализатора оптического спектра:
• Динамический диапазон – определяет возможность измерения амплитуд сигналов в широком диапазоне. Большой динамический диапазон может потребоваться, например, при исследовании полосы пропускания оптического канала, когда могут быть важны аномальные характеристикибоковой полосы, уровень мощности которой ниже уровня основного сигнала более, чем на 50 дБ.
• Чувствительность – способность измерять оптические сигналы маленькой интенсивности.
• Разрешение по полосе пропускания RBW (ResolutionBandwidth) – возможность различения близко расположенных длин волн, которая необходима для исследования спектральной структуры каналов систем DWDM. RBW приобретает все большее значение с увеличением числа используемых каналов в прежнем волновом диапазоне.
•
Точность – возможность точно и правильно измерять длины волн и
мощность.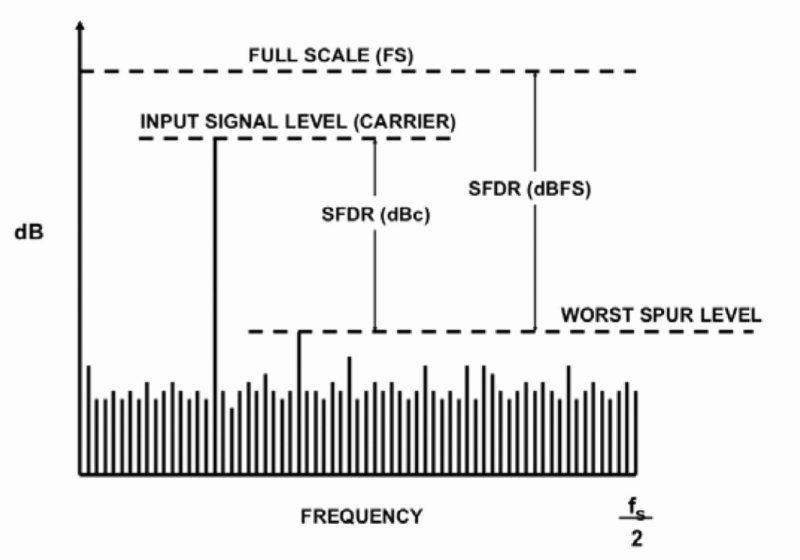
Первые две характеристики зависят в основном от используемого детектора, следовательно, выбирая детектор, можно частично удовлетворить требованиям конкретногоизмерения.
Важным достоинством анализаторов OSA, использующих дифракционные решетки, является их высокое спектральное разрешение. Современный уровень производствапозволяет изготовлять решетки со спектральным разрешением достаточным для тестирования систем DWDM. В тоже время абсолютная точность измерений является ахиллесовой пятой таких анализаторов: калибровка абсолютной длины волны зависит отположения множества механических компонентов – в частности углового положениярешетки – поэтому трудно гарантировать стабильные результаты.
Измерители длины волны. Измеритель длины волны представляет второй тип приемника с избирательностью подлинам волн. По сути, он является интерферометром Майкельсона, рис. 5.3, a. Перемещение зеркала в опорном плече интерферометра приводит к изменению картины интерференции двух пучков света. При этом результирующий сигнал на фотодетектореизменяется синусоидально для входного монохроматического светового пучка, а дляпучка с несколькими длинами волн — по более сложному закону. Чтобы получитьспектр входного оптического сигнала, электрический сигнал на выходе фотодетектораобрабатывается с помощью быстрого преобразования Фурье.
Измеритель
длины волны по характеристикам сопоставим с анализатором OSA, однакоих сильные и
слабые стороны полностью различаются. Во-первых, измеритель длиныволны полностью
использует всю энергию источника, а потому измерения в спектральном диапазоне
(или на нескольких разных длинах волн) с помощью измерителя длинволн выполняются
одновременно, в отличие от OSA (детектор OSA в каждый моментвремени наблюдает
лишь за небольшой спектральной зоной). Измеритель длины волныудобен для
масштабного, быстрого тестирования каналов.
Точная информация об относительной длине волны извлекается из сигнала методами БПФ, а привязка к абсолютной длине волны производится по встроенному в прибор гелий-неоновому (He-Ne)лазеру. Таким образом, в итоге абсолютная точность измерений довольно высока (лучше, чем 0,005 нм), чего вполне достаточно для исследования спектрального распределения каналов, например, в 80-канальных системах WDM.
Измеритель длин волн имеет ограниченный динамический диапазон измерений (чуть больше 30 дБ), чего недостаточно для полного описания характеристик каналов системы DWDM, а также низкую чувствительность к слабым сигналам. Тем не менее, высокая точность измерения длин волн и возможность одновременной регистрации всех длин волн полосы пропускания делают его весьма полезным дополнением к анализатору спектра OSA. Измерители длин волн со встроенным эталоном абсолютной длины волны предназначены для измерений, требующих частой калибровки.
О реальной селективности КВ приемников
Автор: Поляков В. Т.
Источник: Поляков В. Т. О реальной селективности КВ приемников / В. Т. Поляков // «Радио», 1981. — № 3–4.
В наши дни, когда коротковолновые диапазоны буквально забиты сигналами десятков тысяч мощных станций, одной из самых важных характеристик связных KB приемников стала так называемая реальная селективность. Особенно остро вопросы реальной селективности приемника возникают иногда на любительских радиостанциях: ведь источник помехи — соседний радиолюбитель может находиться совсем рядом, даже в одном доме. Единой методики оценки реальной селективности пока не существует, поэтому в литературе ее нередко характеризуют самыми различными параметрами. Чтобы объективно сопоставлять характеристики различных аппаратов, важно понимать физический смысл этих параметров и их взаимосвязи. Попробуем разобраться в этом.
Попробуем разобраться в этом.
Рассмотрим сначала явления, происходящие в приемнике при наличии сильных помех на частотах, лежащих за пределами его полосы пропускания. Эти помехи могут воздействовать на все каскады, предшествующие фильтру основной селекции, например, на усилитель ВЧ, первый и второй смесители. Усиление этих каскадов при действии помех, как правило, уменьшается — возникает так называемое явление за-бития. Его характеризуют уровнем помехи, снижающей усиление на 1 или 3 дБ. Если система АРУ выключена, а напряжение сигнала значительно меньше напряжения помехи, то этот параметр не будет зависеть от уровня полезного сигнала. Не зависит он и от того, насколько помеха отстоит от частоты сигнала, если, конечно, частота помехи не выходит за пределы полосы пропускания высокочастотной части приемника.
Если помеха к тому же и промодулирована по амплитуде, то коэффициент усиления ВЧ каскадов непрерывно изменяется. Это приведет к тому, что и несущая полезного сигнала будет промодулирована сигналом помехи. Возникает явление перекрестной модуляции (кросс-модуляции). Ее характеризуют уровнем помехи с коэффициентом модуляции 30%, вызывающей 3-процентную перекрестную модуляцию сигнала. Он также не зависит от амплитуды полезного сигнала и расстройки но отношению к нему помехи. Поскольку изменение усиления ВЧ каскадов, вызывающее 30%-ную перекрестную модуляцию, составляет менее 0,3 дБ, то характеризующий ее уровень помехи будет всегда меньше, чем уровень помехи, характеризующий забитие.
При воздействии на приемник не менее двух помех возникает взаимная модуляция (интермодуляция). В ВЧ каскадах образуются комбинационные частоты (рис. 1) вида 2f1 – f2 и 2f2 – f1, (если действуют только две помехи с частотами f1 и f2).
Рисунок 1
При перестройке приемника по диапазону будут прослушиваться сигналы не только на их частотах, но и на указанных выше комбинационных частотах, хотя реально последних сигналов в эфире нет. Обилие на диапазоне сильных сигналов в сочетании с явлением взаимной модуляции создает впечатление, что эфир буквально «забит» станциями. Распознать взаимную модуляцию труднее, чем перекрестную или забитие. Возникает же она, как правило, при меньших уровнях помех, чем перекрестная модуляция и тем более забитие.
Обилие на диапазоне сильных сигналов в сочетании с явлением взаимной модуляции создает впечатление, что эфир буквально «забит» станциями. Распознать взаимную модуляцию труднее, чем перекрестную или забитие. Возникает же она, как правило, при меньших уровнях помех, чем перекрестная модуляция и тем более забитие.
Четвертый вид помех, которому почему-то не уделяют должного внимания, представляет собой увеличение общего уровня шумов приемника при воздействии сильного внеполосного сигнала. Шумовая модуляция возникает в смесителе (или смесителях) приемника и связана с недостаточной спектральной чистотой сигнала гетеродина. Дело в том, что напряжение гетеродина, хотя и очень слабо, промодулировано тепловым шумом по амплитуде и фазе. Поэтому спектр сигнала гетеродина имеет вид, показанный на рис. 2.
Рисунок 2
Он содержит несущую на частоте гетеродина fг и шумовые боковые полосы. Уменьшение их интенсивности с расстройкой определяется добротностью контура гетеродина. Уровень шумовых боковых полос обычно лежит на 100…140 дБ ниже уровня «несущей». Когда гетеродинный сигнал поступает на смеситель одновременно с внеполосной помехой, часть шумовой боковой полосы преобразуется в промежуточную частоту. Это иллюстрирует рис. 3, где показаны частоты сигнала fc, гетеродина fг, помехи fп и промежуточная fпч.
Рисунок 3
Как видно на рисунке, часть спектра шума гетеродина, выделенная штриховыми линиями, преобразуется в частоты, попадающие в полосу пропускания тракта ПЧ.
При работе в эфире распознать шумовую модуляцию трудно. Подключение антенны увеличивает шум приемника, причем неясно, вызвано ли это естественным «шумом эфира» или шумовой модуляцией в приемнике. Однако, поскольку последняя зависит от уровня помех, а также их модуляции, ее характер несколько отличается от теплового и индустриального шума эфира. Кроме того, интенсивность шума уменьшается при удалении частоты настройки приемника от частоты помехи, что объясняется не только селективностью входных цепей, но и уменьшением спектральной плотности шума гетеродина (см. рис. 2).
рис. 2).
Среди перечисленных выше явлений, характеризующих реальную селективность, шумовая модуляция стоит особняком, так как непосредственно не связана с нелинейностью ВЧ каскадов приемника. Тем не менее именно она нередко является главным фактором, препятствующим приему слабых сигналов в условиях сильных помех.
Эффективным средством борьбы с шумовой модуляцией является правильное проектирование гетеродина приемника. Его контур должен иметь максимально возможную добротность. Необходимо также «заземлять» электроды транзисторов гетеродина (например, в схеме с общей базой) по низкой частоте, чтобы на них не возникло заметных шумовых напряжений. Иногда шум гетеродина удается снизить на порядок и более, увеличив емкости всех блокировочных конденсаторов до 0,1…0,5 мкФ. Желательно также применять в гетеродине малошумящие полевые транзисторы.
Рассмотрев явления, ограничивающие реальную селективность, покажем теперь, каким именно образом они связаны с нелинейностью ВЧ каскадов приемника. Сделаем это на примере усилителя ВЧ, имея в виду, что для смесителя можно провести аналогичные рассуждения.
Выходное напряжение идеального линейного каскада прямо пропорционально входному, т. е. Uвых=к1Uвх, где к1 — коэффициент усиления каскада. Такой каскад не создает искажений (см. амплитудную характеристику на рис. 4), а спектры сигналов на его выходе и входе одинаковы.
Рисунок 4 Рисунок 5
Характеристика реального каскада сложнее. Математически ее можно представить в виде ряда
| Uвых = к1Uвх + к2U2вх + к3U3вх … | (1) |
Чем больше членов ряда, тем ближе она к реальной. Первый член описывает неискаженный сигнал, последующие — продукты искажений. На рис.5 показана характеристика, которая аппроксимируется только двумя членами — первым (линейным) и вторым (квадратичным).
Если на вход ВЧ каскада с такой характеристикой поступают два сигнала с разными частотами, то среди продуктов искажений будет содержаться компонента постоянного тока (продетектированные сигналы), сигналы с суммарными и разностными частотами, а так же вторые гармоники. Частоты продуктов искажений лежат достаточно далеко от частот входных сигналов, поэтому даже при минимальной селективности входных цепей перекрестные и интермодуляционные помехи в каскаде с такой характеристикой возникать не должны. Вот отсюда и возникло широко распространенное мнение, что квадратичная характеристика хороша для высокочастотного усилителя. Однако это не так. Компонента постоянного тока изменяет режим (сдвигает рабочую точку) каскада, а это вызывает, в свою очередь, изменение коэффициента усиления и, следовательно, перекрестные помехи. Средством борьбы с этим явлением служит жесткая стабилизация режима каскада по постоянному току.
Так же, как и в гетеродине, электроды транзисторов должны быть «заземлены» и по низкой частоте. Квадратичный член характеристики очень опасен в приемниках прямого преобразования, где продетектированные сигналы попадают непосредственно в усилитель НЧ, и в приемниках с высокой ПЧ и широкополосной преселекцией, где сумма или разность двух частот помех может совпасть с частотой настройки приемника.
Для подавления помех, вызванных квадратичной нелинейностью, применяют двухтактные (балансные) усилители ВЧ и смесители. В точно сбалансированном каскаде квадратичный член ряда (1), также как и остальные члены с четными степенями, полностью компенсируется. Характеристика каскада при этом приобретает вид, показанный на рис. 6.
Рисунок 6
Математически ее можно выразить так:
| Uвых = k1Uвых – k3U3вх | (2) |
Более высокими членами ряда (1) обычно пренебрегают. Такое приближение оправдано, если анализируемое устройство работает в условиях не очень сильных помех. Отметим, что характеристика симметричная и имеет протяженный линейный участок, а загибы при входных напряжениях, больших Um, соответствуют ограничению сигнала в каскаде. В отличие от квадратичных, кубические искажения полностью устранить нельзя принципиально, так как любой каскад неизбежно ограничивает достаточно большие входные сигналы. Расширить же протяженность линейного участка можно, применяя в усилителе ВЧ мощные транзисторы, а в смесителе — диоды, допускающие работу при больших мощностях гетеродина без существенного повышения уровня шума, например диоды с барьером Шоттки.
Такое приближение оправдано, если анализируемое устройство работает в условиях не очень сильных помех. Отметим, что характеристика симметричная и имеет протяженный линейный участок, а загибы при входных напряжениях, больших Um, соответствуют ограничению сигнала в каскаде. В отличие от квадратичных, кубические искажения полностью устранить нельзя принципиально, так как любой каскад неизбежно ограничивает достаточно большие входные сигналы. Расширить же протяженность линейного участка можно, применяя в усилителе ВЧ мощные транзисторы, а в смесителе — диоды, допускающие работу при больших мощностях гетеродина без существенного повышения уровня шума, например диоды с барьером Шоттки.
Механизм возникновения забития и перекрестных помех в каскаде с характеристикой (2) состоит в следующем. Если амплитуда помехи достигает значения Um, то сумма слабого полезного сигнала и помехи ограничивается, т. е. коэффициент усиления каскада для слабого сигнала уменьшается.
Интермодуляционные помехи связаны с кубическим членом ряда (2). Математический анализ этих явлений позволяет получить некоторые количественные соотношения:
- интенсивность перекрестных помех пропорциональна отношению коэффициентов k2/k1;
- коэффициент перекрестной модуляции пропорционален квадрату амплитуды помехи;
- амплитуда интермодуляционной помехи при воздействии на вход каскада двух мешающих сигналов одинаковой амплитуды пропорциональна кубу этой амплитуды, если же амплитуды помех (см. рис. 1) равны соответственно a1 и a2, то амплитуда низкочастотной интермодуляциониой компоненты на частоте 2f1–f2 пропорциональна a21a2, а амплитуда высокочастотной — a1a22.
Из сказанного можно сделать вывод, что очень полезно уменьшать уровень всех сигналов на входе приемника, например, с помощью аттенюатора. Введение затухания в 10 дБ ослабляет полезный сигнал на 10 дБ, но зато перекрестную модуляцию на 20, а взаимную модуляцию на 30 дБ. Однако введению большого затухания препятствует ограниченное значение чувствительности приемника.
Введение затухания в 10 дБ ослабляет полезный сигнал на 10 дБ, но зато перекрестную модуляцию на 20, а взаимную модуляцию на 30 дБ. Однако введению большого затухания препятствует ограниченное значение чувствительности приемника.
Взаимную модуляцию часто оценивают количественно, как уровень двух помех равной амплитуды, создающих интермодуляционные компоненты с напряжением, приведенным ко входу, 1 мкВ. Выбор этого напряжения весьма условен, а сам метод дает представление о реальной селективности лишь при одном конкретном значении помехи. Более полная методика измерения комбинационных помех была предложена первоначально для широкополосных линейных усилителей (высокочастотных и выходных в передатчиках), а затем использована и для приемников.
Рассмотрим ее подробнее.
На рис. 7 показана зависимость выходной мощности усилителя от входной (линия 1). Эту характеристику снимают, подавая на вход один немодулироваиный сигнал.
Рисунок 7
Для двух сигналов разной частоты, но одинаковой амплитуды, можно построить зависимость искажений второго порядка, т. е. зависимость мощности компонент с суммарными и разностными частотами от мощности сигналов на входе (линия 2). График строят в логарифмическом масштабе (мощность измерена в децибелах относительно 1 мВт. сокращенно дБм), поэтому 1 и 2 в области небольших сигналов оказываются прямыми, но наклон второй линии вдвое больше, чем первой. Так получается потому, что амплитуда выходного полезного сигнала пропорциональна амплитуде входного, а амплитуда составляющих искажений второго порядка — ее квадрату. Это же самое справедливо и для мощности сигналов. Продолжим прямые 1 и 2 до их пересечения. Координаты точки пересечения (A2) однозначно определяют параметры всего усилителя. Например, отношение A2вых/А2вх, соответствует коэффициенту усиления. Относительную величину искажений d2 можно найти для каждого уровня входного сигнала из графика как расстояние между прямыми 1 и 2 по вертикали.
Аналогично строится зависимость мощности компонент искажений третьего порядка с частотами 2f1–f2 (линия 3). Она оказывается втрое круче прямой A поскольку амплитуда компонент третьего порядка пропорциональна кубу амплитуды входных сигналов. Искажения третьего порядка также полностью описываются координатами точки пересечения прямых 1 и 3 — A3. В качестве примера на рис. 7 приведены характеристики усилителя с коэффициентом усиления 10 дБ, уровнем искажений второго порядка –15 дБ и третьего порядка –20 дБ при входной мощности 1 мВт, Из характеристик легко найти уровень искажений для любой мощности входного сигнала. Можно воспользоваться и формулами, которые легко получаются из геометрии графика:
| d2 = A2вх – Рвх, d3 = 2( A3вх – Pвх). | (3) |
Для данного усилителя координаты точек пересечения: A2вх = 15 дБм, A3вх = 10 дБм. Значения A2вх и A3вх соответственно на 10 дБ больше.
Любопытно, что переход к двухтактной схеме усилителя уменьшает искажения второго порядка (в зависимости от точности балансировки) на 10…40 дБ. На графике рис, 7 это выразится в сдвиге линии 2 На столько же децибел вправо (линия 2′). Соответственно изменятся координаты точки А2. Положение точки А3 при этом остается прежним.
В приемниках неудобно измерять выходной сигнал его высокочастотной части, к тому же часто путают между собой координаты точек пересечения. Поэтому для приемников предложена несколько иная методика построения графиков, подобных рис. 7. По оси абсцисс откладывают уровень входного сигнала, а по оси ординат — выходного сигнала ВЧ части приемника, приведенной ко входу, т. е. поделенный на коэффициент усиления ВЧ каскадов. В этом случае прямая, соответствующая полезному сигналу (рис. 8, линия 1), будет иметь единичный наклон.
Рисунок 8
Уровни сигналов могут выражаться в микровольтах (масштаб во всех случаях логарифмический) или в децибелах. При этом используются относительные единицы измерения: дВмкВ — отношение напряжения сигнала к 1 мкВ, выраженное в децибелах, и дБм — отношение мощности сигнала к 1 мВт, также в децибелах. На рис. 8 приведены три шкалы, что облегчает перевод одних единиц в другие. Нижняя шкала (дБм) соответствует верхним, только если входное сопротивление приемника равно 75 Ом. Рассмотрим входные каскады приемника с характеристикой, которая описывается выражением (2). Такие каскады, как было сказано ранее, не вносят квадратичных искажений). Составляющим взаимной модуляции с частотами 2f1–f2 и 2f2–f1 на рис. 8 соответствует линия 3. Их уровень пропорционален кубу напряжения сигналов на входе, поэтому прямая 3 идет втрое круче прямой 1, т. е. приращение ординаты составляет 3 дБ на каждый децибел приращения абсциссы. Точка пересечения прямых А имеет координаты, равные по обеим осям. Зная одну из них, легко построить весь график. Если же, например, из измерений известен уровень взаимной модуляции (предположим, 80 дБ по отношению к 1 мкВ), то график также легко построить, найдя точки 0 и 80 дБмкВ (на рисунке обе точки обозначены) и проведя через них прямые с наклоном 1:1 и 3:1. Затем по графику определяют одну из координат точки пересечения (в нашем случае A = 120 дБмкВ, или +11 дБм). Ее можно найти и расчетным путем:
При этом используются относительные единицы измерения: дВмкВ — отношение напряжения сигнала к 1 мкВ, выраженное в децибелах, и дБм — отношение мощности сигнала к 1 мВт, также в децибелах. На рис. 8 приведены три шкалы, что облегчает перевод одних единиц в другие. Нижняя шкала (дБм) соответствует верхним, только если входное сопротивление приемника равно 75 Ом. Рассмотрим входные каскады приемника с характеристикой, которая описывается выражением (2). Такие каскады, как было сказано ранее, не вносят квадратичных искажений). Составляющим взаимной модуляции с частотами 2f1–f2 и 2f2–f1 на рис. 8 соответствует линия 3. Их уровень пропорционален кубу напряжения сигналов на входе, поэтому прямая 3 идет втрое круче прямой 1, т. е. приращение ординаты составляет 3 дБ на каждый децибел приращения абсциссы. Точка пересечения прямых А имеет координаты, равные по обеим осям. Зная одну из них, легко построить весь график. Если же, например, из измерений известен уровень взаимной модуляции (предположим, 80 дБ по отношению к 1 мкВ), то график также легко построить, найдя точки 0 и 80 дБмкВ (на рисунке обе точки обозначены) и проведя через них прямые с наклоном 1:1 и 3:1. Затем по графику определяют одну из координат точки пересечения (в нашем случае A = 120 дБмкВ, или +11 дБм). Ее можно найти и расчетным путем:
где d3 — уровень взаимной модуляции при напряжении помехи и Uвх (все величины измерены в децибелах).
Посмотрим теперь, как другие параметры, определяющие реальную селективность, связаны с координатой точки пересечения. Уровень забития Uзаб находится по ослаблению усиления ВЧ части приемника на 3 дБ. Его можно определить, сняв реальную амплитудную характеристику ВЧ тракта (кривая 2). Входное напряжение, при котором она отклоняется на 3 дБ от прямой 1 и есть уровень забития (см. рис. 8). Это напряжение обычно на 10…12 дБ меньше А. Перекрестная модуляция также однозначно определяется координатой точки пересечения.
Перейдем теперь к определению динамического диапазона приемника. Нижняя граница его, в принципе, должна соответствовать минимальному, еще различимому сигналу на входе приемника. Её удобно выбрать равной уровню собственных шумов приемника, поскольку при отношении сигнал/шум, равном единице, телеграфные, а в ряде случаев и однополосные сигналы еще принимаются. Естественной верхней границей динамического диапазона будет тогда уровень двух немодулированных помех, при котором продукты взаимной модуляции достигают уровня шумов. Практически это означает следующее: если уровни сигналов на входе приемника ниже верхней границы динамического диапазона, то слышны только эти сигналы на их собственных частотах, а продукты взаимной модуляции «тонут» в шумах приемника. В противном случае, когда уровень сигналов превышает верхнюю границу динамического диапазона, прослушиваются еще и интермодуляционные помехи на комбинационных частотах вида 2f1–f2.
Динамический диапазон легко найти из рис. 8 (в первой части статьи). Нижняя и верхняя его границы определяются точками пересечения линий 1 и 3 со штриховой линией, соответствующей уровню шума. Динамический диапазон в децибелах можно определить графически, как расстояние между линиями 1 и 3, либо по горизонтали, либо по вертикали, как показано на рисунке. Для рассматриваемого приемника (а это, по современным понятиям, очень хороший приемник) уровень шума составляет 0,1 мкВ и динамический диапазон по взаимной модуляции d3 = 93 дБ.
В технической литературе встречаются еще такие понятия, как динамический диапазон по перекрестной модуляции и забитию d2 и динамический диапазон по шумовой модуляции. Верхней границей этих диапазонов служат соответственно уровни помех, при которых коэффициент перекрестной модуляции достигает оговоренного значения, например 3%, или уровень шума возрастает вдвое. Как показывает практика, значения этих параметров получаются в правильно спроектированном приемнике значительно больше, чем d3. Поэтому динамический диапазон по взаимной модуляции D3, найденный выше, следует считать основным параметром, характеризующим реальную селективность.
Поэтому динамический диапазон по взаимной модуляции D3, найденный выше, следует считать основным параметром, характеризующим реальную селективность.
Динамический диапазон зависит от двух исходных параметров: координаты точки пересечения А и уровня шума Uш. Напряжение шума приемника, в свою очередь, зависит от полосы пропускания, оно определяется известной формулой Найквиста:
| Uш = (kT0(F–1)BRвх)1/2 | (5) |
где kT0 = 4х10-21 Вт/Гц — энергия хаотического теплового движения носителей тока;
В — полоса пропускания, Гц;
Rвх — входное сопротивление приемника, Ом;
F — коэффициент шума приемника.
Легко видеть, что динамический диапазон расширяется в сторону нижней границы при сужении полосы пропускания приемника. По этой причине характеризовать качество приемника его динамическим диапазоном можно, оговаривая полосу пропускания, при которой этот диапазон измерен (обычно 2,1…2,7 кГц). Полоса пропускания определяется трактом ПЧ, поэтому динамический диапазон не является характеристикой только ВЧ каскадов приемника.
В последнее время предложен новый критерий качества приемника, не зависящий от полосы пропускания. Заметим, что в формуле Найквиста (5) уже имеется не зависящая от полосы величина — коэффициент шума F, показывающий, во сколько раз мощность шума реального приемника больше мощности шума идеального, в котором источником шума является только активное входное сопротивление Rвх. Коэффициент шума можно выразить в децибелах: FдБ=10 lgF.
Теперь показателем качества приемника можно взять величину Q:
где А — координата точки пересечения в децибелах на графике рис. 8. В принципе, Q можно измерить в дБмкВ или дБм в зависимости от того, в каких единицах выражена координата А. Очевидно, что Q от полосы приемника не зависит. Чем больше Q, тем соответственно лучше и реальная селективность приемника.
Очевидно, что Q от полосы приемника не зависит. Чем больше Q, тем соответственно лучше и реальная селективность приемника.
К сказанному необходимо сделать лишь несколько полезных замечаний. Ни «точка пересечения», ни динамический диапазон, ни «показатель качества» не затрагивают шумовую модуляцию. Ее, видимо, следует учитывать при измерении коэффициента шума приемника, подав на вход кроме слабого измерительного сигнала на частоте настройки еще и сильный внеполосный сигнал с амплитудой, соответствующей верхней границе динамического диапазона. Полученный таким образом коэффициент шума может оказаться выше, чем при обычных измерениях с одним сигналом, напряжение которого равно напряжению внутренних шумов приемника. Необходимо только позаботиться о спектральной чистоте сильного внеполосного сигнала, пропустив его через кварцевый фильтр, иначе шумовая модуляция измерительного генератора может оказаться больше шумовой модуляции приемника и результат измерений получится завышенным. Шумовую модуляцию полезно также измерить при различных расстройках сильного сигнала, получив таким образом спектр шума гетеродина, подобный изображенному на рис. 2.
Другое замечание касается необходимости все-таки указывать в параметрах приемника границы динамического диапазона. Они чаще всего и указываются, хотя и в неявном виде. Нижняя граница легко находится из чувствительности приемника. Например, если она равна 0,3 мкВ при отношении сигнал/шум 10 дБ, то уровень шума (нижняя граница) составляет 0,1 мкВ, или –20 дБмкВ. Если же дано, что динамический диапазон равен 93 дБ, то верхняя граница динамического диапазона составит 73 дБмкВ, или 4,6 мВ. Знание границ динамического диапазона необходимо потому, что приемник подключается к реальной антенне, на зажимах которой имеется свой диапазон сигналов. Он простирается от уровня шума «эфира» до уровня сигнала, наводимого в антенне самой мощной станцией (или помехой). Диапазоны сигналов в антенне и динамический диапазон приемника необходимо согласовывать между собой. Никому ведь не придет в голову включить двенадцативольтную лампочку в сеть напряжением 220 В! А подобная ситуация получается при подключении приемника с чувствительностью 0,3 мкВ к полноразмерной антенне при работе в диапазонах 160 и 80 м. Напряжение только атмосферного шума (без учета индустриального) на зажимах такой антенны может лежать в пределах 2…15 мкВ, т. е. на 25…45 дБ превосходить напряжение собственных шумов приемника. Это иллюстрируется номограммой рис. 9, где слева показан диапазон сигналов антенны, развивающей напряжение шума 10 мкВ, а справа — динамический диапазон приемника с параметрами, как на рис. 8.
Никому ведь не придет в голову включить двенадцативольтную лампочку в сеть напряжением 220 В! А подобная ситуация получается при подключении приемника с чувствительностью 0,3 мкВ к полноразмерной антенне при работе в диапазонах 160 и 80 м. Напряжение только атмосферного шума (без учета индустриального) на зажимах такой антенны может лежать в пределах 2…15 мкВ, т. е. на 25…45 дБ превосходить напряжение собственных шумов приемника. Это иллюстрируется номограммой рис. 9, где слева показан диапазон сигналов антенны, развивающей напряжение шума 10 мкВ, а справа — динамический диапазон приемника с параметрами, как на рис. 8.
Рисунок 9
Динамический диапазон собственно приемника равен 93 дБ. Однако при подключении к антенне приемник все равно не сможет принимать сигналы слабее 10 мкВ, а верхняя граница по-прежнему остается равной 4,5 мВ. В результате динамический диапазон всей системы антенна — приемник Dобщ сужается до 53 дБ, что соответствует приемнику очень низкого класса.
Для расширения динамического диапазона всей системы между антенной и приемником необходимо ввести аттенюатор. Введение затухания 40 дБ уравнивает нижние границы диапазонов антенны и приемника, а общий расширяется до 90 дБ. Потери в 3 дБ вызваны в этом случае сложением равных по мощности шумов антенны и приемника. Аттенюатор должен быть регулируемым. Для приема слабых сигналов уровень шума антенны (с помощью аттенюатора) следует устанавливать на 10…15 дБ выше уровня шума приемника. Тогда чувствительность системы будет определяться почти исключительно шумом «эфира», а динамический диапазон сузится на те же 10…15 дБ. При наличии сильных помех аттенюатор вводится настолько, чтобы уровень помех лежал ниже верхней границы динамического диапазона приемника. На высокочастотных диапазонах (10, 15 м) шум «эфира» невелик и составляет (если нет индустриальных помех) доли микровольта. В этих условиях аттенюатор полезен лишь при наличии очень сильных помех.
В заключение автор благодарит С. Жутяева (UW3FL) за полезные дискуссии, способствовавшие появлению данной статьи.
Динамический диапазон приемника, помехоустойчивость, стои-мость и экономичность радиоприемных устройств
Радиоприемное устройство является частью системы передачи сообщений, использующей для этого энергию радиоволн. Предназначено оно для воспроизведения передаваемого сообщения с заданной степенью точности. Радиоприемное устройство состоит из трех основных частей:
- приемная антенна;
- собственно радиоприемник;
- воспроизводящее устройство.
Четыре основных функции радиоприемного устройства:
- выделение сигнала из помех;
- усиление радиосигнала;
- преобразование радиосигнала в электрический сигнал;
- преобразование электрического сигнала в сообщение.
Динамический диапазон приемника определяет способность приемника обнаруживать слабый входной сигнал, больший уровня шума и, с другой стороны, обрабатывать сигналы большого уровня без искажения. Отношение максимального сигнала к минимальному сигналу на входе приемника и определяет динамический диапазон приемника:
Специфическую важность имеют следующие два параметра радиоприемного устройства: динамический диапазон, свободный от помех SFDR (Spurious Free Dynamic Range), и динамический диапазон по блокированию помех BDR (Blocking Dynamic Range).
Динамический диапазон, свободный от помех SFDR, основан на отношении между максимальным входным уровнем, для которого интермодуляционные продукты третьего порядка имеют уровень, меньший уровня шума, и минимальным различимым сигналом Smin.
Рис 1. Интермодуляционные продукты приемника третьего порядка, ограничивающие динамический диапазон приемника.
Верхнюю границу динамического диапазона приемника по блокированию BDR определяет сигнал однодецибельной точки блокирования, нижнюю — Smin.
Рис 2. Динамический диапазон приемника по блокированию BDR.
Динамический диапазон приемника по блокированию BDR.
Максимальный коэффициент усиления функционально законченного тракта приемника определяется, исходя из максимально возможного внутриполосного блокирования Pбл. Это означает, что максимальный коэффициент усиления зависит от качества фильтрации перед каскадами основного усиления.
Обычно приемник получает на вход смесь передаваемого сигнала S(t) и помехи n(t). x(t)=S(t)+n(t) .
Как правило, передаваемый сигнал S(t) – это сложное колебание, которое содержит кроме времени, множество других параметров (амплитуду, фазу, частоту и т.д.), т.е. сигнал:
S(t)=f(a,b,c,…t).
Для передачи информации используется один, или группа этих параметров, и для приемника задача состоит в определении значений этих параметров в условиях мешающего действия помех. Если поставленная задача решается наилучшим образом, по сравнению с другими приемниками, то такой приемник можно назвать приемником, обеспечивающим потенциальную помехоустойчивость (идеальный приемник).
Данный приемник содержит два генератора опорных сигналов S1 (t) и S2(t), которые вырабатывают такие сигналы, которые могут поступать на вход приемника. А также два квадратора и два интегратора и схему сравнения, которая выполняет функции распознавания и выбора, формируя на выходе сигналы S1 и S2 . Т.к. данная схема идеального приемника, является приемником Котельникова, то она выдает на выходе сигналы, отличные от передаваемых. Для решения этой задачи, в схему включены выравнивающие устройства.
Способ передачи информации (кодирование и модуляция) задан и задача сводится к поиску оптимальной помехоустойчивости, которую обеспечивают различные способы приема.
Под помехоустойчивостью системы связи подразумевается способность системы восстанавливать сигналы с заданной достоверностью. Предельно допустимая помехоустойчивость называется потенциальной. Сравнение потенциальной и реальной помехоустойчивости позволяет дать оценку качества приема данного устройства и найти еще не использованные ресурсы.
Предельно допустимая помехоустойчивость называется потенциальной. Сравнение потенциальной и реальной помехоустойчивости позволяет дать оценку качества приема данного устройства и найти еще не использованные ресурсы.
Сведения о потенциальной помехоустойчивости приемника при различных способах передачи позволяют сравнить эти способы между собой и найти наиболее совершенные.
Оценка динамического диапазона приемника
Динамический диапазон приемника ограничен снизу шумами приемника, сверху – пределами линейной части характеристик его каскадов. Строгий расчет динамического диапазона требует изучения нелинейности характеристик каскадов, характер и величина которой зависят от схемы каскада, типа активного прибора, режима его работы и т. д. Оценку динамического диапазона рекомендуется произвести по упрощенной методике.
Амплитудную характеристику любого усилителя или смесителя можно аппроксимировать рядом
,
где коэффициенты K2, K3 и т. д. характеризуют искажающие свойства каскада. При наличии на входе усилителя или смесителя двух сигналов (например, полезного сигнала с частотой и помехи с частотой , близкой к ) на выходе, кроме сигналов и появляются гармоники этих сигналов, комбинационные частоты и постоянная составляющая. Их уровень непосредственно связан с нелинейностью усилителей и смесителей. Принципиально нелинейными являются также варикапы, переключающие диоды и некоторые другие элементы, используемые в сигнальных цепях. Оценка нелинейности обычно производится двухсигнальным методом.
Динамический диапазон D – это выраженное в децибелах отношение уровня двух равных по величине входных сигналов к уровню создаваемой ими комбинационной помехи при условии равенства ее уровня уровню собственных шумов приемника. Расчетная формула:
,
где — уровень полезного сигнала на входе, при котором на выходе уровень комбинационной составляющей третьего порядка равен уровню полезного сигнала на линейном продолжении амплитудной характеристики (рис. 33).
33).
На рис.33 приведены графики зависимости выходной мощности сигналов с частотами и от их мощности на входе. При превышении определенного уровня входных сигналов линейный рост выходных сигналов замедляется. Если продолжить линейную часть графика полезного сигнала (пунктирная линия), то в точке пересечения А выходной уровень полезного сигнала равен уровню составляющей третьего порядка.
Координаты точки А характеризуют линейные свойства каскада, причем значение АВХ на оси абсцисс соответствует входному уровню сигналов, а АВЫХ на оси ординат – выходному.
| Рис. 33. График зависимости выходной мощности полезного сигнала и комбинационной составляющей третьего порядка от уровня полезного сигнала при двухсигнальном методе исследования |
В активных цепях значение АВЫХ больше АВХ на коэффициент усиления каскада G, выраженный в децибелах:
АВЫХ(дБм) = АВХ(дБм) + G(дБ).
В пассивных цепях, например в диодных смесителях, значение АВЫХ меньше АВХ на величину потерь в смесителе.
Зная положение точки А на графике, можно рассчитать уровень колебаний комбинационной частоты при любых входных сигналах: если каскад работает при уровне выходного сигнала на Х дБ ниже значения АВЫХ, то уровень комбинационных частот третьего порядка будет на 3Х дБ ниже значения АВЫХ. Допустим, АВЫХ = дБм и РВЫХ 10 дБм. Тогда Х = РВЫХВЫХ дБ и уровень комбинационных частот третьего порядка будет на 3∙40=120 дБ ниже значения АВЫХ.
Тогда Х = РВЫХВЫХ дБ и уровень комбинационных частот третьего порядка будет на 3∙40=120 дБ ниже значения АВЫХ.
Для уменьшения уровня комбинационных искажений следует снижать уровни входных сигналов. Однако это допустимо лишь до тех пор, пока комбинационные колебания превышают уровень собственных шумов приемника. Динамический диапазон лучших современных приемников достигает 100…120 дБ, что дает возможность принимать полезный сигнал при уровнях помех, превышающих его в 105…106 раз.
При оценке динамического диапазона расчет производится следующим образом. Оценивается мощность шума, приведенная к входу приемника
,
где П – отношение полосы пропускания приемника к полосе 1 Гц, N – безразмерный коэффициент шума. Затем из табл. 8 выбирается значение АВЫХ, соответствующее типу каскада, и рассчитывается АВХ:
АВХ = АВЫХ – G,
где АВХи АВЫХимеют размерность дБм, а G – коэффициент передачи каскада (по мощности), дБ. После этого пользуются расчетной формулой для D.
Таблица 8
Значение параметра А ВЫХвых. Таблица 8
| № | Тип каскада | АВЫХ, дБм |
| УРЧ на транзисторе | 5 – 10 | |
| Смеситель на транзисторе | 0 – 5 | |
| Смеситель на двухзатворном полевом транзисторе | 18 – 20 | |
| Кольцевой смеситель на диодах | 15 – 20 | |
| Балансный смеситель на полевых транзисторах в пассивном режиме |
В качестве примера рассчитаем динамический диапазон приемника, первым каскадом которого является смеситель на двухзатворном полевом транзисторе КП350. Исходные параметры: усиление смесителя G = 20 дБ, параметр АВЫХ = 18 дБ, коэффициент шума N = 10 дБ, полоса пропускания селективного тракта П = 500 Гц. Получаем:
Исходные параметры: усиление смесителя G = 20 дБ, параметр АВЫХ = 18 дБ, коэффициент шума N = 10 дБ, полоса пропускания селективного тракта П = 500 Гц. Получаем:
АВХ = АВЫХ – G = 18 – 20 дБм= – 2 дБм, РШ.ВХ = – 174+10 lg 500 + 10 =
– 137 дБм, D = ⅔ ( ‑ 2 + 137) дБ = 90 дБ.
При расчете приемника его каскады должны быть согласованы по максимальному допустимому уровню входных и выходных сигналов. Значение АВЫХ первого каскада должно быть больше или равно значению АВХ второго каскада и т. д. Динамический диапазон приемника в целом ограничивается динамическим диапазоном того из каскадов, стоящих пред ФСС, у которого этот диапазон минимален.
Рассмотрим пример. Пусть первыми каскадами приемника являются УРЧ (NУРЧ = 6 дБ, GУРЧ = 20 дБ, АВЫХ.УРЧ = 5 дБм) и активный смеситель (NСМ = 20 дБ, GСМ = 3 дБ, АВЫХ.СМ = 0 дБм). Имеем:
АВХ.СМ = АВЫХ.СМ – GСМ = 0 – 3 дБм= – 3 дБм.
Следовательно, , т. е. допустимый уровень сигналов на входе УРЧ выше, чем допустимый уровень входных сигналов смесителя, и при расчете динамического диапазона приемника вместо АВЫХ. УРЧ следует брать АВХ.СМ.
Совместный коэффициент шума УРЧ и смесителя:
.
Шумовой порог (при П = 3 кГц):
РШ.ВХ = – 174 дБм + 7 дБ + 35 дБ = – 132 дБм.
Параметр АВХ приемника:
АВХ = АВХ.СМ – GУРЧ = – 3 дБм – 20 дБм = – 23 дБм.
Динамический диапазон:
.
Заметим, что расчет динамического диапазона приемника без УРЧ дает в рассматриваемом примере 77,3 дБ, т. е. включение в схему УРЧ, с одной стороны, повышает чувствительность приемника, но с другой ‑ уменьшает динамический диапазон. Снижение динамического диапазона по соседнему каналу приема из-за перегрузки первого смесителя, вызванной избыточным усилением предшествующих каскадов, приводит к «непрозрачности эфира» – не удается выделить слабый сигнал из шумов при наличии помех. В этом случае следует повысить избирательность входных цепей или включить на входе приемника аттенюатор, не нарушающий режимов работы активных элементов, выбранных из условий максимальной линейности.
Снижение динамического диапазона по соседнему каналу приема из-за перегрузки первого смесителя, вызванной избыточным усилением предшествующих каскадов, приводит к «непрозрачности эфира» – не удается выделить слабый сигнал из шумов при наличии помех. В этом случае следует повысить избирательность входных цепей или включить на входе приемника аттенюатор, не нарушающий режимов работы активных элементов, выбранных из условий максимальной линейности.
Для оценки линейных свойств каскадов, следующих за ФСС, используется понятие динамического диапазона по основному каналу приема. Верхний предел динамического диапазона по основному каналу определяется нелинейностью последнего каскада УПЧ или УНЧ, нижний – шумами. Расширение динамического диапазона по основному каналу достигается применением эффективной системы АРУ, снижающей перегрузку конечных каскадов и, следовательно, величину нелинейных искажений.
Выбор регулировок приемника
При эскизном проектировании предусматривается система регулировок, обеспечивающая:
— поддержание точной настройки приемника на частоту принимаемого сигнала;
— поддержание заданного уровня сигнала на входе детектора.
Автоматическая подстройка частоты гетеродина позволяет уменьшить до допустимой величины требуемую полосу пропускания УПЧ приемника, если абсолютное значение нестабильности настроек велико.
Если принять, что без системы АПЧ требуется полоса
,
то при наличии АПЧ с коэффициентом подстройки КАПЧ
.
Здесь fД – доплеровское смещение частоты, а величина нестабильности настроек ПНС определяется по формуле:
,
где и – нестабильности частот сигнала и гетеродина, и – неточности настроек частот гетеродина и УПЧ.
При расчете задаются относительной нестабильностью частот , соответствующей выбранной схеме устройства. Чем выше частота f, тем больше получается абсолютное значение нестабильности.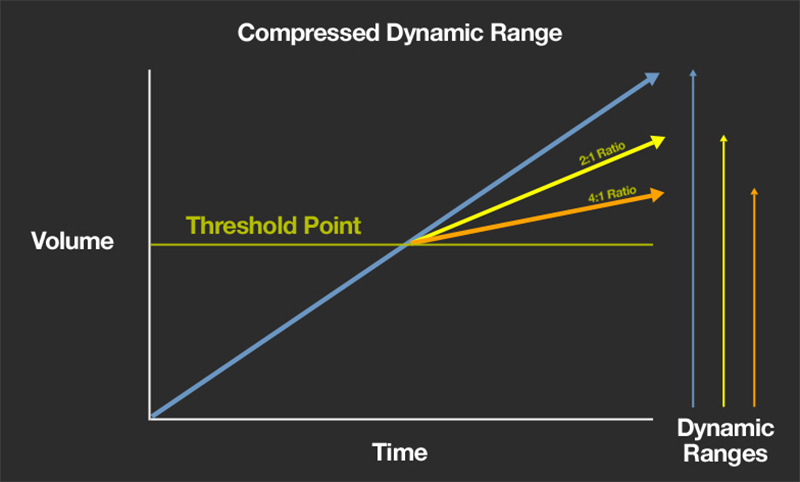 Поэтому, например, в области ДВ и СВ вещательных диапазонов величина ПНС оказывается небольшой, по сравнению с ПС, и система АПЧ не требуется, а в области УКВ диапазона – большой, что делает систему АПЧ обязательной.
Поэтому, например, в области ДВ и СВ вещательных диапазонов величина ПНС оказывается небольшой, по сравнению с ПС, и система АПЧ не требуется, а в области УКВ диапазона – большой, что делает систему АПЧ обязательной.
Транзисторный гетеродин без кварцевой стабилизации имеет относительную нестабильность частоты порядка 10 – 3 … 10 – 4 в диапазоне частот ниже
30 МГц и 10 – 2 … 10 – 3 в диапазоне частот выше 30 МГц. Применение кварцевой стабилизации позволяет уменьшить величину относительной нестабильности до 10 – 5 … 10 – 7.
Значение зависит от способа настройки. Коэффициент / = 0,003 … 0,0003.
При наличии системы ФАП полагают П = ПС.
Система АРУ применяется для расширения динамического диапазона приемника по основному каналу и как корректор мультипликативной помехи. Если требуемый диапазон входных сигналов составляет А дБ, а изменение напряжения на выходе допускается в пределах В дБ, то требуемое изменение коэффициента усиления приемника равно (А – В) дБ.
Режимная регулировка позволяет изменять коэффициент усиления одного транзисторного усилительного каскада на 20-26 дБ. Максимальный уровень входного напряжения такого каскада ограничен значением
,
где – амплитуда входного сигнала в милливольтах, – допустимый для данного каскада коэффициент нелинейных искажений при коэффициенте модуляции . Обычно мВ.
Полагая, что в качестве регулируемых каскадов в радиоприемнике используются идентичные усилители промежуточной частоты, определяют требуемое число каскадов
,
с округлением до ближайшего большего целого числа.
В целях обеспечения хороших характеристик реальной избирательности, чувствительности и линейности преобразования нежелательно регулировать усиление в первом каскаде УРЧ и смесителях. При необходимости на УРЧ организуется отдельная цепь АРУ, управляющее напряжение которой вырабатывается по сигналу, еще не прошедшему ФСС. Это позволяет снижать усиление УРЧ при действии мощных внеполосных помех, что способствует уменьшению перекрестных и интермодуляционных искажений, т.е. расширению динамического диапазона приемника.
Это позволяет снижать усиление УРЧ при действии мощных внеполосных помех, что способствует уменьшению перекрестных и интермодуляционных искажений, т.е. расширению динамического диапазона приемника.
В современных радиоприемных устройствах проблему регулирования усиления решают путем использования управляемых аттенюаторов на диодах или варикапах, включаемых между каскадами. Перспективным является также метод регулирования за счет изменения глубины отрицательной обратной связи усилителей. Метод имеет то положительное свойство, что введение обратной связи улучшает линейность усилителя.
Общие сведения о динамическом диапазоне | Микроволны и RF
Динамический диапазон — ключевой параметр в электронных системах, но его часто трудно сравнивать на уровне компонентов при попытке спроектировать систему с оптимальными характеристиками. это спецификация, которая часто определяется на верхнем пределе концептуальным параметром, известным как точка пересечения третьего порядка (TOi). Чтобы полностью понять пределы динамического диапазона приемника или компонентов ВЧ / СВЧ, образующих систему, может быть полезно понять различные элементы, составляющие динамический диапазон.
Обычно выражается в децибелах (дБ), динамический диапазон — это отношение наивысшего уровня сигнала, который может обработать схема, компонент или система, в дБ относительно 1 мВт мощности (дБм) к самому низкому уровню сигнала, который может обработать ( в дБм). Для определения сигнала наивысшего уровня можно использовать несколько параметров, таких как точка сжатия 1 дБ, а также точка TOi. Например, точка компрессии усилителя на 1 дБ — это место, где линейность компонента начинает ухудшаться. В линейных условиях увеличение входной мощности на 1 дБ приведет к увеличению выходной мощности на 1 дБ.Когда увеличение на выходе на 1 дБ меньше увеличения на входе, это считается точкой сжатия усилителя на 1 дБ.
Точно так же смесители обычно характеризуются динамическим диапазоном, который имеет точку сжатия 1 дБ на одном конце и коэффициент шума смесителя на другом конце. Для пассивных смесителей тепловой шум или коэффициент шума примерно одинаковы, поэтому динамический диапазон смесителя обычно определяется точкой сжатия 1 дБ. выше этого уровня микшер имеет тенденцию генерировать недопустимые уровни интермодуляционных искажений, которые могут скрывать сигналы низкого уровня.
Для пассивных смесителей тепловой шум или коэффициент шума примерно одинаковы, поэтому динамический диапазон смесителя обычно определяется точкой сжатия 1 дБ. выше этого уровня микшер имеет тенденцию генерировать недопустимые уровни интермодуляционных искажений, которые могут скрывать сигналы низкого уровня.
Общее практическое правило для пассивных радиочастотных смесителей заключается в том, что точка сжатия на 1 дБ возникает при амплитуде, которая примерно на 5–10 дБ меньше мощности гетеродина (гетеродина), подаваемой на смеситель. Многие поставщики пассивных ВЧ-смесителей маркируют свою продукцию на разных рабочих уровнях, например, для смесителей низкого, среднего или высокого уровня, в зависимости от величины мощности гетеродина, необходимой для работы. Определения того, что является смесителем низкого или высокого уровня, могут варьироваться в зависимости от отрасли, но обычно для определения смесителя низкого уровня используется уровень гетеродина около +7 дБм, в то время как уровни гетеродина +10 и +14 дБм обычно являются используется для смесителей среднего и высокого уровня соответственно.
Например, известный поставщик микшеров Mini-Circuits предлагает микшеры с уровнями гетеродина от +3 дБм до +17 дБм. в общем, следуя приведенному выше эмпирическому правилу, смесители с более высоким уровнем возбуждения гетеродина будут давать более высокую точку компрессии на 1 дБ и, таким образом, более высокий динамический диапазон приемника.
При сравнении смесителей по точке пересечения важно стандартизировать входные или выходные точки пересечения для сравнения. в любом случае высокая точка пересечения обозначает смеситель, который обеспечивает высокий динамический диапазон, поскольку он может обрабатывать более высокие уровни сигнала, прежде чем создавать интермодуляционные искажения, которые затемняют полезный сигнал.
Если фактическая рабочая точка составляет сжатие на 1 дБ, TOi приемника, смесителя или усилителя является математическим понятием.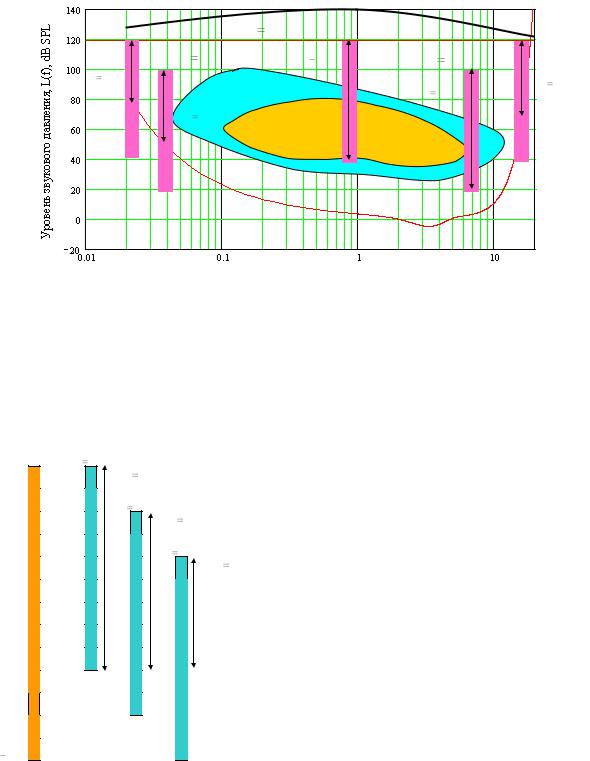 он связывает нелинейные произведения нелинейного члена третьего порядка разложения в ряд Тейлора с линейным выходным сигналом компонента, такого как смеситель или усилитель. в некоторых случаях линейность компонента также может определяться его точкой пересечения второго порядка, в которой используются члены второго порядка разложения в ряд Тейлора, хотя TOi является гораздо более полезным параметром, поскольку он относится к уровням сигналов блокиратора или глушителя. которые падают близко к интересующему фундаментальному сигналу.Поскольку он близок к полезному сигналу, его трудно или невозможно удалить путем фильтрации без ослабления полезного сигнала.
он связывает нелинейные произведения нелинейного члена третьего порядка разложения в ряд Тейлора с линейным выходным сигналом компонента, такого как смеситель или усилитель. в некоторых случаях линейность компонента также может определяться его точкой пересечения второго порядка, в которой используются члены второго порядка разложения в ряд Тейлора, хотя TOi является гораздо более полезным параметром, поскольку он относится к уровням сигналов блокиратора или глушителя. которые падают близко к интересующему фундаментальному сигналу.Поскольку он близок к полезному сигналу, его трудно или невозможно удалить путем фильтрации без ослабления полезного сигнала.
Точки пересечения могут быть определены как функция гармоник с использованием однотональных тестовых сигналов ( Рис. 1 ) или по продуктам интермодуляции с использованием двухтональных тестовых сигналов. Уровни гармоник измеряются в дБн, или уровне децибел гармоник ниже полезного сигнала несущей, тогда как интермодуляционные искажения обычно выражаются в дБ относительно мощности 1 мВт или дБм.Важно отметить, что два типа точек перехвата будут различаться по уровню, поэтому при сравнении динамических диапазонов различных компонентов, устройств или систем можно использовать только похожие типы точек перехвата.
В приемнике динамический диапазон простирается от точки TOI на конце высокого уровня до чувствительности на конце низкого уровня. TOI является результатом насыщения сигнала и эффектов искажения, в то время как на чувствительность влияют тепловой шум рабочей среды и коэффициент шума приемника, уровни паразитных составляющих, гармоники и фазовый шум.Динамический диапазон приемника в значительной степени зависит от смесителей и усилителей в системе, но также может быть ограничен как активными, так и пассивными фильтрами в цепи сигнала.
Схема автоматической регулировки усиления (АРУ) на входе приемника может быть полезна для предотвращения насыщения сигнала и генерации паразитных сигналов. В испытательном оборудовании, которое похоже на измерительный приемник с экраном дисплея, таком как анализатор спектра, отображаемый средний уровень шума (DANL) обычно используется для обозначения нижней границы динамического диапазона.
В испытательном оборудовании, которое похоже на измерительный приемник с экраном дисплея, таком как анализатор спектра, отображаемый средний уровень шума (DANL) обычно используется для обозначения нижней границы динамического диапазона.
Чувствительность иногда может вводить в заблуждение. Например, чувствительность приемника может пострадать при наличии сильных сигналов. При сравнении приемников один с повышенной чувствительностью может не так хорошо работать с сигналами низкого уровня, как менее чувствительный приемник, когда он находится вблизи сигналов высокого уровня. Как правило, при сравнении необходимо учитывать динамический диапазон, поскольку приемник с низкой чувствительностью, но с превосходным динамическим диапазоном может обрабатывать сигналы низкого уровня без ухудшения из-за интермодуляционных искажений лучше, чем приемник с высокой чувствительностью, но с худшими характеристиками динамического диапазона. .
Что касается чувствительности, приемники иногда используют показатель качества, известный как минимальный различимый сигнал (MDS), который представляет собой уровень сигнала, равный уровню шума и обычно указываемый в дБм. Поскольку уровень шума зависит от ширины полосы анализа приемника или анализатора спектра, ширина полосы анализа должна быть нормализована при сравнении единиц по значениям MDS.
См. Соответствующий рисунок
Что такое динамический диапазон радиоприемника »Примечания к электронике
Есть несколько важных параметров, связанных с работой радиоприемника — одним из ключевых параметров является динамический диапазон.
Радиодинамический диапазон Включает:
Что такое динамический диапазон
В сегодняшней среде радиосвязи важна динамическая яркость приемника, потому что необходимо принимать как сильные, так и слабые сигналы, а также слабые сигналы при наличии сильных.
При большом количестве существующих радиостанций постоянно передается множество сигналов — например, мобильные телефоны должны одновременно принимать как слабые, так и сильные сигналы. Конструкция радиочастотной схемы радиоприемника будет определять факторы, определяющие динамический диапазон, поэтому важно учитывать их на самых ранних этапах разработки концепции.
Конструкция радиочастотной схемы радиоприемника будет определять факторы, определяющие динамический диапазон, поэтому важно учитывать их на самых ранних этапах разработки концепции.
В то время как динамический диапазон очень важен для радиоприемников и приложений радиосвязи, он также важен во многих других областях, от фотоаппаратов до аудиомикшеров и многих других предметов, где необходимо учитывать множество различных входных уровней.
Хотя некоторые параметры будут изменяться в зависимости от рассматриваемого оборудования, основная концепция динамического диапазона остается диапазоном, в котором оборудование может успешно обрабатывать входящие сигналы.
Что такое динамический диапазон?
Динамический диапазон радиоприемника — это, по сути, диапазон уровней сигнала, в котором он может работать.
Может помочь определение динамического диапазона радио.
Определение динамического диапазона радиоприемника:
Динамический диапазон радиоприемника, вероятно, лучше всего определить как диапазон входных уровней, в котором радиоприемник может успешно принимать требуемые сигналы.
Есть много параметров, связанных с динамическим диапазоном приемника, которые важны для приложений радиосвязи всех форм.
Нижний предел диапазона определяется его чувствительностью, а верхний предел — его перегрузкой или высокими характеристиками обработки сигнала. Тем не менее, существует несколько различных соглашений, которые используются для измерения динамического диапазона приемника.
В спецификацияхобычно используются цифры, основанные либо на характеристиках интермодуляции, либо на характеристиках блокировки. К сожалению, не всегда можно сравнить один набор с другим, потому что динамический диапазон, как и многие другие параметры, можно указывать разными способами.
Концепция динамического диапазона радиоприемника
Однако, чтобы понять, что именно означает динамический диапазон радиоприемника, стоит взглянуть на способы, которыми производятся измерения для определения дальности действия радиоприемника.
Чувствительность
Первое, что нужно изучить, — это чувствительность приемника. Основным ограничивающим фактором в любом радиоприемнике является генерируемый внутренний шум. Для многих приложений радиосвязи используется либо отношение сигнал / шум, либо коэффициент шума.
Однако для спецификаций динамического диапазона часто используется показатель, называемый минимальным различимым сигналом (MDS). Обычно это принимается как сигнал, равный по силе уровню шума.
Поскольку уровень шума зависит от используемой полосы пропускания, это также должно быть упомянуто в спецификации. Обычно уровень уровня MDS указывается в дБм, т.е. дБ относительно милливатта, и типичные значения составляют около -135 дБмВт в полосе пропускания 3 кГц.
Обработка сильного сигнала
Хотя чувствительность важна, также очень важен способ, которым радиоприемник обрабатывает сильные сигналы.
Есть несколько спецификаций, которые могут быть важны в спецификациях динамического диапазона:
Продукты третьего порядка: Проблемы возникают, когда гармоники внутриполосных сигналов смешиваются вместе. Было обнаружено, что комбинация сигналов может формироваться, как показано ниже, и они могут просто попадать на ту же частоту, что и слабая и интересная станция, тем самым маскируя ее, чтобы ее нельзя было услышать.
Рассчитать частоты, на которых будут падать паразитные сигналы, несложно.Если входные частоты f 1 и f 2 , то новые производимые частоты будут на 2f 1 — f 2 , 3f 1 — 2f 2 , 4f 1 — 3f 2 и так далее. С другой стороны от двух основных или исходных сигналов, продукты производятся на 2f 2 — f 1 , 3f 2 — 2f 2 , 4f 2 — 3f 1 и так далее, как показано на диаграмму. Они известны как продукты интермодуляции нечетного порядка.
Дважды один сигнал плюс один раз другой дает продукт третьего порядка, трижды один плюс два раза другой — продукт пятого порядка и так далее. Из диаграммы видно, что сигналы по обе стороны от основных сигналов сначала являются продуктом третьего порядка, затем пятым, седьмым и так далее.Для примера с некоторыми реальными цифрами. Если большие сигналы появляются на частотах 30,0 МГц и 30,01 МГц, то продукты интермодуляции появляются на частотах 30,02, 30,03, 30,4 … МГц и 29.99, 29,98, 29,97 ….. МГц.
Спектр продуктов интермодуляции от двух сигналовБлокировка: Другая проблема, которая может возникнуть при наличии сильного сигнала, известна как блокировка. Как следует из названия, сильный сигнал может блокировать или, по крайней мере, снижать чувствительность радиоприемника. Эффект можно заметить при прослушивании относительно слабой станции, когда ближайший передатчик начинает излучать, а мощность полезного сигнала уменьшается.Эффект возникает, когда входной РЧ-усилитель начинает работать в режиме сжатия. Когда это происходит, самый сильный сигнал имеет тенденцию «захватывать» РЧ-усилитель, уменьшая силу других сигналов. Эффект такой же, как эффект захвата, связанный с FM-сигналами.
Этот аспект характеристик радиоприемника очень важен в большом количестве приложений радиосвязи, от мобильных телефонов до стратегических радиосистем.
Уровень блокировки, очевидно, зависит от уровня сигнала.Это также зависит от того, насколько далеко от канала находится сильный сигнал. Чем дальше, тем больше он будет уменьшен настройкой передней части и тем меньше будет эффект. Обычно блокировка определяется как уровень нежелательного сигнала при заданном смещении (обычно 20 кГц), что дает снижение усиления на 3 дБ.
Точка пересечения: В идеальном мире выход усилителя ВЧ был бы пропорционален входу для всех уровней сигнала. Однако ВЧ усилители имеют только ограниченную выходную мощность, и было обнаружено, что за пределами определенного уровня выходной сигнал падает ниже требуемого уровня, поскольку он не может обрабатывать требуемые большие уровни.Это дает характеристику, подобную показанной ниже. Из этого можно видеть, что усилители ВЧ линейны для нижней части характеристики, но поскольку выходные каскады не могут обрабатывать более высокие уровни мощности, сигналы начинают сжиматься, что видно по кривой характеристики.
Характеристическая кривая усилителя, показывающая зону перегрузкиТот факт, что усилитель ВЧ является нелинейным, сам по себе не создает серьезной проблемы. Однако побочные эффекты есть.Когда сигнал проходит через нелинейный элемент, можно заметить два основных эффекта. Во-первых, генерируются гармоники. К счастью, это вряд ли вызовет серьезную проблему. Чтобы гармоника упала на частоту, близкую к принимаемой, сигнал на половине принятой частоты должен поступить в РЧ-усилитель. Настройка передней части должна уменьшить это в достаточной степени, чтобы это не было заметной проблемой в большинстве случаев.
Другая проблема, которую можно заметить, состоит в том, что сигналы смешиваются, образуя нежелательные продукты.Маловероятно, что это вызовет проблему, потому что любые сигналы, которые могут смешиваться вместе, должны быть в достаточной степени удалены с помощью настройки входного каскада. Вместо этого возникают проблемы, когда гармоники внутриполосных сигналов смешиваются вместе.
 Дважды один сигнал плюс один раз другой дает продукт третьего порядка, трижды один плюс два раза другой — продукт пятого порядка и так далее. Из диаграммы видно, что сигналы по обе стороны от основных сигналов сначала являются продуктом третьего порядка, затем пятым, седьмым и так далее.
Дважды один сигнал плюс один раз другой дает продукт третьего порядка, трижды один плюс два раза другой — продукт пятого порядка и так далее. Из диаграммы видно, что сигналы по обе стороны от основных сигналов сначала являются продуктом третьего порядка, затем пятым, седьмым и так далее.Характеристики динамического диапазона
При рассмотрении спецификаций динамического диапазона следует проявлять осторожность при их интерпретации. MDS на нижнем конце сигнала следует внимательно рассматривать, но ограничивающие факторы на верхнем конце показывают гораздо больший разброс в способе их определения.
Если используется блокировка, обычно указывается снижение чувствительности на 3 дБ, но в некоторых случаях может использоваться 1 дБ. Если в качестве предельной точки выбраны продукты интермодуляции, часто берется уровень входного сигнала для них, равный MDS. Независимо от того, какая спецификация дана, следует проявлять осторожность при интерпретации цифр, поскольку они могут тонко отличаться от способа измерения от одного приемника к другому.
Чтобы получить представление о цифрах, которые могут быть получены там, где интермодуляция является ограничивающим фактором, цифры в диапазоне от 80 до 90 дБ являются типичными, а где блокировка является ограничивающим фактором, цифры около 115 дБ обычно достигаются в хорошем радиоприемнике. используется для профессиональных приложений радиосвязи.
Разработка для оптимального динамического диапазона
Создать высокочувствительный радиоприемник с широким динамическим диапазоном — непростая задача. Конструкция ВЧ-схемы требует тщательного баланса множества различных параметров для получения оптимальных характеристик. Однако это важное требование для многих систем радиосвязи, особенно там, где устройства мобильной радиосвязи могут находиться в непосредственной близости друг от друга.
Для достижения требуемого уровня производительности можно использовать несколько методов.
- Шумовые характеристики входного каскада: Конструкция ВЧ-схемы входного каскада радиоприемника является наиболее важной с точки зрения шумовых характеристик. Он должен быть оптимизирован для шумовых характеристик, а не для усиления. Для этого очень важно согласование входного импеданса. Интересно отметить, что оптимальное соответствие не совсем соответствует лучшим шумовым характеристикам. Электронные компоненты, включая активное устройство, следует выбирать с учетом их шумовых характеристик.
- Выходные возможности входного каскада: Входной усилитель также должен иметь относительно высокую выходную мощность, чтобы не допускать перегрузки. ВЧ-конструкция должна обеспечивать достаточную выходную мощность, не создавая при этом высоких уровней шума.
- Смеситель высокого уровня: Работа микшера является одним из ключевых электронных компонентов, обеспечивающих хороший динамический диапазон и характеристики перегрузки. ВЧ-конструкция радиоприемника должна гарантировать, что микшер не будет перегружен.Для этого не должно предшествовать чрезмерное усиление. Также следует использовать смеситель высокого уровня (т.е. такой, который предназначен для приема сигнала гетеродина высокого уровня). Таким образом, он может выдерживать высокие входные сигналы без снижения производительности.
- Поздние ступени приемника: Конструкция радиочастотной схемы должна гарантировать, что более поздние ступени приемника могут выдерживать уровень сигналов, которые могут возникнуть при приеме сильных сигналов. Относительно легко вычислить максимальные уровни сигнала, которые возникают на каждой ступени приемника, а затем убедиться, что они могут быть учтены конструкцией ВЧ.На этих этапах шумовые характеристики не так важны, поэтому для обеспечения требуемых уровней сигнала можно использовать высокие уровни протекания тока.
- Автоматическая регулировка усиления: Включение хорошей системы АРУ в конструкцию ВЧ также помогает предотвратить перегрузку и генерацию нежелательных паразитных сигналов. Подавая напряжение, зависящее от уровня сигнала, на некоторые из более ранних каскадов приемника, можно гарантировать, что последние на ВЧ конструкции не будут перегружены.Конструкция схемы АРУ может оказаться весьма сложной, поскольку могут потребоваться разные постоянные времени в контуре АРУ для обеспечения оптимального управления для различных типов модуляции: AM, SSB и т. Д.
Это лишь некоторые из вопросов, которые следует учитывать при проектировании ВЧ-схемы любого типа приемника, требующего высокого динамического диапазона.
Радиоприемник, будь то традиционный радиоприемник для приема на коротких волнах или мобильный телефон, или любой другой приемник, сможет гораздо лучше справиться с жесткими условиями, если он будет иметь хорошие характеристики динамического диапазона.
Хотя чувствительность требуется для многих приложений, от нее мало пользы, если сильные ближние передачи как по частоте, так и по местоположению означают, что чувствительность не может быть реализована.
Другие важные темы по радио:
Радиосигналы
Типы и методы модуляции
Амплитудная модуляция
Модуляция частоты
OFDM
ВЧ микширование
Петли фазовой автоподстройки частоты
Синтезаторы частот
Пассивная интермодуляция
ВЧ аттенюаторы
RF фильтры
Радиочастотный циркулятор
Типы радиоприемников
Радио Superhet
Избирательность приемника
Чувствительность приемника
Обработка сильного сигнала приемника
Динамический диапазон приемника
Вернуться в меню тем Радио.. .
Технический бюллетень GBPPR № 5 — Взаимосвязь шума, чувствительности и динамического диапазона приемника
Технический бюллетень GBPPR № 5 — Взаимосвязь шума приемника, чувствительности и динамического диапазонаТехнический бюллетень GBPPR № 5 — Взаимосвязь шума, чувствительности и динамического диапазона приемника
Правильная конструкция приемника — это концепция, которую радиолюбители не понимают. Когда вы имеете дело с сигналами ниже -100 дБмВт и радиочастотной средой, вызывающей интермодуляцию, это обучение Radio Shack просто не подходит. t сократить это.
Выдержка из Modern Electronic Communication, 4 -е издание
Зависимость шума приемника, чувствительности и динамического диапазона
Как будет видно, существуют различные компромиссы и отношения между коэффициентом шума, чувствительностью и динамическим диапазоном при работе с высококачественными системами приемников.
Чтобы полностью понять эти отношения для приемника, сначала необходимо распознать факторы, ограничивающие чувствительность.Одним словом, фактор, напрямую ограничивающий чувствительность, — это «шум». Без шума было бы необходимо обеспечить достаточное усиление для приема любого сигнала, даже самого маленького. К сожалению, шум присутствует всегда, и его необходимо понимать и контролировать в максимально возможной степени.
Есть много источников шума. Подавляющим эффектом приемника является тепловой шум, вызванный активностью электронов в сопротивлении. Мощность шума (P n ) составляет:
P n = k * T * BWk = постоянная Больцмана, 1.38 * 10 -23 Дж / К
T = Температура резистора в кельвинах (K)
BW = Полоса частот рассматриваемой системы
Для полосы пропускания 1 Гц и при 290 K:
P n = 1,38 * 10 -23 * 290 * 1 P n = 4 * 10 -21 Вт P n = -174 дБмДля полосы пропускания 1 Гц и 1 К:
P n = 1.38 * 10 -23 Вт P n = -198 дБмВыше показано, что температурная переменная представляет интерес, поскольку можно снизить температуру контура и уменьшить шум без изменения других параметров системы. При 0 К шум отсутствует. К сожалению, это очень дорого и сложно эксплуатировать системы даже при температуре около 0 К. Большинство приемных систем работают при температуре окружающей среды. Другой возможный способ снизить тепловой шум — уменьшить полосу пропускания.Однако возможности дизайнера в этом отношении ограничены.
Шум и чувствительность приемника
Какая чувствительность приемника? На этот вопрос нельзя ответить напрямую, не сделав определенных предположений или не зная определенных фактов, которые повлияют на результат. Рассмотрение следующей формулы иллюстрирует зависимые факторы при определении чувствительности (S).
S = -174 дБм + NF + 10log 10 BW + желаемый S / N, где -174 дБмВт — мощность теплового шума при комнатной температуре (290 K) в полосе пропускания 1 Гц (BW).Это характеристики, достижимые при комнатной температуре, если не задействованы другие факторы ухудшения качества. Коэффициент полосы пропускания 10log 10 представляет изменение мощности шума из-за изменения выше полосы пропускания 1 Гц. Чем шире полоса пропускания, тем выше мощность шума и выше минимальный уровень шума. S / N — это отношение полезного сигнала к шуму в дБ. Он может быть определен для уровня сигнала, который едва обнаруживается, или его можно рассматривать как уровень, допускающий выходной сигнал с различными номиналами или точностью.Часто используется отношение сигнал / шум 0 дБ, что означает, что мощность сигнала и шума на выходе равны. Таким образом, сигнал также можно назвать равным минимальному уровню шума приемника. Минимальный уровень шума приемника и выходной шум приемника — это одно и то же.
Рассмотрим приемник с полосой пропускания 1 МГц и коэффициентом шума 20 дБ. Если требуется отношение сигнал / шум 10 дБ, чувствительность (S) составляет:
S = -174 + 20 + 10log 10 1000000 + 10 S = -84 дБмИз этого видно, что если требуется более низкое отношение сигнал / шум, необходима лучшая чувствительность приемника.Если используется отношение сигнал / шум 0 дБ, чувствительность станет -94 дБм. Значение -94 дБм — это уровень, при котором мощность сигнала равна мощности шума в полосе пропускания приемника. Если бы полоса пропускания была уменьшена до 100 кГц при сохранении того же уровня входного сигнала, выходное отношение сигнал / шум увеличилось бы до 10 дБ из-за снижения мощности шума.
Динамический диапазон
Динамический диапазон усилителя или приемника — это диапазон входной мощности, в котором он обеспечивает полезный выходной сигнал.Следует подчеркнуть, что динамический диапазон приемника и диапазон АРУ обычно представляют собой две разные величины. Предел низкой мощности — это, по сути, характеристики чувствительности, обсуждаемые в предыдущих параграфах. Это функция шума. Верхний предел связан с точкой, в которой система больше не обеспечивает такое же линейное увеличение, которое связано с увеличением входного сигнала. Это также связано с определенными компонентами искажения и степенью их воздействия.
При тестировании приемника (или усилителя) на верхний предел динамического диапазона обычно применяется одна тестовая частота и определяется точка компрессии на 1 дБ (P1 дБ ).Как показано на рисунке 1, это точка на соотношении вход / выход, где выходной сигнал только что достиг уровня, на 1 дБ ниже идеального линейного отклика. Входная мощность в этой точке затем определяется как определение верхнего предела мощности динамического диапазона.
Рисунок 1На практике определенные характеристики искажения, которые влияют на обычно встречающиеся многочастотные сигналы, часто являются основным фактором. Когда две частоты ( f 1 и f 2 ) усиливаются, продукты искажения второго порядка обычно выходят за пределы полосы пропускания системы и, следовательно, не представляют проблемы.Они встречаются при 2 f 1 , 2 f 2 , f 1 + f 2 и f 1 — f 2 . К сожалению, продукты третьего порядка на 2 f 1 + f 2 , 2 f 1 — f 2 , 2 f 2 — f 1 и 2 f 2 + f 1 обычно имеют компоненты в полосе пропускания системы.Введенное таким образом искажение называется интермодуляционным искажением . Эффекты интермодуляции настолько сильно влияют на верхний динамический диапазон приемника (или усилителя), что они часто задаются через точку пересечения третьего порядка . Это показано на рисунке 1. Это входная мощность в точке, где встречаются прямые продолжения желаемых соотношений ввода / вывода третьего порядка. На рисунке 1 он составляет около 20 дБмВт. Он используется только в качестве показателя качества.Чем лучше система в отношении интермодуляционных искажений, тем выше будет ее точка пересечения третьего порядка.
Динамический диапазон системы обычно приблизительно равен:
динамический диапазон (дБ) = 2/3 * (точка пересечения третьего порядка - минимальный уровень шума)Плохой динамический диапазон вызывает проблемы, такие как нежелательные помехи и искажения, когда принимается сильный сигнал. Текущий уровень техники — динамический диапазон около 100 дБ.
Наибольшая чувствительность может быть реализована при использовании предусилителя с наименьшим коэффициентом шума и наибольшим доступным усилением, чтобы замаскировать более высокий коэффициент шума приемника.Следует помнить, что с увеличением усиления увеличивается вероятность появления паразитных сигналов и компонентов интермодуляционных искажений в нелинейной области. Предварительный усилитель, используемый перед входом приемника, имеет эффект уменьшения точки пересечения третьего порядка пропорционально коэффициенту усиления усилителя. Следовательно, для поддержания высокого динамического диапазона лучше всего использовать усиление, необходимое для получения желаемого коэффициента шума. В общем смысле чрезмерное усиление бесполезно.
Вернитесь в Green Bay Professional Packet Radio для получения дополнительной информации и контактной информации.
Микроволны101 | Динамический диапазон
Щелкните здесь, чтобы перейти на главную страницу приемников
Новинка сентября 2010 года! Динамический диапазон — это измерение способности приемника обрабатывать диапазон входной мощности от антенны. Если сигнал слишком слабый, его нельзя выделить из шума, слишком большой, и что-то начинает вызывать шпоры, или, возможно, возникает насыщение.
Компаньон
Динамический диапазон имеет такое же значение в аудио. В оркестрах есть отрывки почти тишины, наряду с пассажами грохочущих пушек, как в случае увертюры 1812 года. Запись и воспроизведение в широком динамическом диапазоне — непростая задача. Иногда раздражает широкий динамический диапазон. Вы когда-нибудь пробовали слушать «магнитофонную книгу» в машине на шоссе? Если громкость голоса говорящего повышается или понижается, вы обнаруживаете, что регулируете громкость динамика, чтобы усилить тихие проходы над шумом ветра, мотора и шин, и уменьшить его, когда начинается крик, чтобы уберечь ваши уши.Таким образом, вы стали компандером, смягчая эффекты сигнала, который имеет слишком большой динамический диапазон для канала (ваших ушей). Слово «компаньон» — это портманто, сокращение сжатия / расширения.
Динамический диапазон без паразитных составляющих
Это равно 2/3 диапазона между минимальным обнаруживаемым сигналом и точкой пересечения третьего порядка. Определенный таким образом динамический диапазон — это область между минимальным обнаруживаемым сигналом и точкой, в которой продукт третьего порядка превышает минимальный уровень обнаружения.
Вот кое-что особенное … если вы очень много работали над улучшением минимально обнаруживаемого сигнала вашего приемника и улучшили его на девять дБ, вы улучшите SFDR только на шесть дБ!
Линейный динамический диапазон
Линейный динамический диапазон приемника — это измерение от минимального обнаруживаемого сигнала до максимального сигнала, который начнет сжимать приемник.
Расширение динамического диапазона
Переключаемые аттенюаторы можно использовать перед приемником для расширения динамического диапазона.Однако это происходит за счет более высокого коэффициента шума в состоянии низкого усиления.
Динамический диапазон— Radartutorial
точка
начала
насыщенность
точка
минимальной чувствительности
Рис. 1: Так называемая калибровочная кривая приемника: выходной сигнал (ось Y) является функцией входной мощности приемника (ось X). Разница между точкой начала искажения и точкой минимальной чувствительности — это динамический диапазон приемника в Децибел (здесь: 118 — 96 = 22 дБ).
точка
начало
искажение
точка
минимальной чувствительности
Рис. 1: Так называемая калибровочная кривая приемника: выходной сигнал (ось Y) является функцией входной мощности приемника (ось X). Разница между точкой начала искажения и точкой минимальной чувствительности — это динамический диапазон приемника в Децибел (здесь: 118 — 96 = 22 дБ).
Динамический диапазон приемника
Отношение мощностей эхо-сигналов с близкого расстояния к эхо-сигналам объектов с очень большого расстояния может достигать 80 дБ.Сигналы с такой большой разницей мощности могут быть обработаны очень сложно. Это особенно актуально, если эхо-сигналы должны быть преобразованы в формат цифровых данных позже при обработке радиолокационного сигнала.
Термин «динамический» описывает соотношение между максимальной и минимально возможной принимаемой мощностью приемника. без перегрузки приемника. Для радиолокационного приемника требуется следующий подход к значениям:
| D = | P r макс. | = значение максимальной мощности сигнала, при котором приемник не перегружен. = значение минимальной мощности сигнала, при котором приемник все еще выдает выходной сигнал. | |
| P r мин |
Большинство параметров радара из уравнение радара можно считать постоянным в течение периода импульса. Есть только поперечное сечение радара σ и соответствующее расстояние до цели, которая должна быть локализована, но сильно варьируется. Следовательно, можно рассматривать минимально возможную принимаемую мощность пропорционально наименьшей отражающей поверхности на максимально возможном расстоянии, и наоборот, максимальная ожидаемая принимаемая мощность от цели с очень большой эффективной площадью отражения в минимально возможное расстояние измерения.
| P r = | P t λ 2 G 2 σ | = к · | σ | (2) |
| (4π) 3 · R 4 | R 4 |
Относительно постоянные значения в уравнении радара объединяются, чтобы сформировать постоянный коэффициент k, и затем математически усекается:
| D = | P r макс. | = | k · σ макс / R 4 мин | = | σ макс. · R 4 макс. | (3) |
| P r мин | k · σ мин. / R 4 макс. | σ мин. · R 4 мин. |
Если в этой формуле используются реальные данные данного радиолокационного набора, получаем необходимый динамический диапазон приемника.Например, УВД-радар ASR-E при длительности передаваемого импульса 45 микросекунд (внутренний модулированный импульс для большой дальности) минимальная дальность 6,75 км. Максимальная дальность с тем же импульсом передачи, таким образом, определена в 60 морских миль, то есть 110 км. Приемник должен обрабатывать радиолокационные сечения минимум 0,1 м² (сверхлегкий самолет). до 100 м² (большой грузовой самолет):
| D = | 100 м² · (110 км) 4 | = 7 · 10 7 ≈ 78.5 дБ |
| 0,1 м² · (6,75 км) 4 |
Таким образом, приемнику необходим динамический диапазон 78,5 дБ. Он должен иметь возможность обрабатывать в дополнение к минимально возможному эхо-сигналу и эти эхо-сигналы, которые в 70 миллионов раз больше.
Это невозможно без несколько схемных трюков которые позволяют так называемое динамическое сжатие. Следует отметить, что это сжатие должно выполняться в полном масштабе: Разницу амплитуд необходимо вычислить математически позже!
Приемник ПЧ с расширенным динамическим диапазономупрощает конструкцию двухточечных модемов мкВт
Микроволновые каналы связи точка-точка являются неотъемлемой частью сотовой мобильной сети, обеспечивая возможность транзитного соединения между сотовыми узлами (BTS / NodeB) и радиоконтроллеры (BSC / RNC) в более чем 50% глобальных развертываний, в которых развертывание волоконно-оптических линий не является рентабельным.Недавний всплеск трафика мобильных сетей, вызванный переходом рынка на смартфоны, усилил потребности в данных, таких как потоковое видео, и оказывает давление на существующую пропускную способность микроволнового транспортного оборудования. Чтобы масштабировать пропускную способность транзитной сети в соответствии с потребностями LTE и LTE-Advanced, микроволновым каналам следующего поколения потребуется:
- Переходите к цифровой модуляции все более высокого порядка с сегодняшнего QAM256 до QAM4096 в будущем, тем самым обеспечивая 50% -ное увеличение пропускной способности при фиксированном назначении каналов.
- Поддержка назначения каналов от 56 МГц до 12 МГц в традиционном диапазоне от 6 ГГц до 42 ГГц. Каждое удвоение полосы пропускания канала обеспечивает пропорциональное увеличение скорости передачи данных, если отношение несущей к шуму (CNR) остается постоянным.
- Используйте такие методы, как поляризационное разнесение, агрегация каналов и MIMO в прямой видимости N × N.
Как это обычно бывает при проектировании систем связи, такое увеличение пропускной способности имеет свою цену.Для поддержки комбинаций более высоких уровней QAM и полосы пропускания канала микроволновая линия должна иметь более широкий динамический диапазон, чтобы поддерживать требуемые минимальные характеристики EVM, особенно с учетом того, что чувствительность приемника снижается на 3 дБ при каждом удвоении размера или полосы пропускания QAM. Поскольку микроволновое оборудование должно оставаться гибким, требуется дополнительное рассмотрение для поддержки всех возможных сценариев работы при одновременном упрощении фильтрации приемника и требований AGC для повышения производительности и снижения затрат.
Дополнительной отраслевой тенденцией является появление полностью наружных блоков (ODU), в которых полный радиомодем и приемопередатчик объединены с блоками коммутации / мультиплексирования и интерфейсом трафика в автономной коробке, установленной на башне или аналогичной конструкции. Эта тенденция определяется капитальными / операционными затратами на новых площадках и нехваткой места на существующих площадках. Традиционные раздельные внутренние (IDU) / наружные (ODU) системы содержат секцию мкВт / ВЧ в ODU с помощью коаксиального кабеля, соединяющегося с остальной частью системы, размещенной в укрытии для оборудования (IDU).Коаксиальный кабель может иметь длину до 30 метров и передавать двунаправленный трафик с помощью диплексера, используемого для отделения сигнала ПЧ приемника с центром на 140 МГц от сигнала ПЧ передатчика с центром в диапазоне от 340 МГц до 400 МГц.
Хотя это заметная тенденция, большая часть оборудования µW, поставляемого сегодня и в обозримом будущем, представляет собой унаследованную систему разделения IDU / ODU. Было бы полезно использовать одну внутреннюю архитектуру приемопередатчика модема для целей повторного использования проекта, которая поддерживает как устаревшую систему, так и платформы ODU следующего поколения.Последние достижения в технологии высокоскоростных ЦАП и АЦП, работающих с тактовой частотой значительно выше 1,5 GSPS, теперь позволяют синтезировать и оцифровывать сигналы QAM с высокими значениями ПЧ с исключительной точностью для поддержки 4096 QAM и выше. Помимо устранения необходимости в любой квадратурной коррекции ошибок, необходимой для традиционных аналоговых реализаций I / Q, высокий динамический диапазон вместе с высоким коэффициентом передискретизации позволяет выполнять большую часть фильтрации в цифровой области, тем самым сокращая объем аналоговой фильтрации и цифровой для их компенсации требуется эквалайзер.Для тракта сигнала передатчика высокоскоростные ЦАП, такие как AD9142 и AD9136, уже начинают заменять традиционные реализации двойного ЦАП и I / Q-модулятора, чтобы синтезировать широкополосные сигналы QAM с исключительными характеристиками EVM, но без необходимости калибровки передатчика. Для тракта прохождения сигнала приемника доступность АЦП 1,5+ GSPS, хорошо подходящих для этих приложений, задерживалась до недавнего выпуска AD6676.
Рис. 1. Блок-схема подсистемы AD6676 IF Rx.
AD6676 — первая в отрасли подсистема широкополосного приемника ПЧ (рис. 1), основанная на полосовом Σ-Δ АЦП, поддерживающая полосу пропускания сигнала ПЧ до 160 МГц при работе с внутренней тактовой частотой до 3,2 ГГц. Это высокая способность передискретизации Σ-Δ АЦП, которая значительно упрощает требования к аналоговой фильтрации ПЧ, необходимые для АЦП с более низкой дискретизацией для подавления соседних каналов (и помех / блокировщиков), которые в противном случае наложили бы на сигнал ПЧ обратный псевдоним, тем самым снижая чувствительность приемников представление.Кроме того, именно высокий динамический диапазон АЦП с минимальным значением NSD –160 дБ полной шкалы / Гц (для узкополосных каналов QAM) снижает требования к изоляции диплексера между передатчиком и приемником или диапазон аналоговой АРУ, который компенсирует замирание. AD6676 включает встроенный цифровой аттенюатор на 27 дБ с разрешением 1 дБ, который можно использовать для калибровки ошибки статического усиления из-за начальных допусков компонентов и изменения потерь в коаксиальном кабеле.
Давайте сначала рассмотрим, как подсистему приемника ПЧ AD6676 вместе с высокоскоростным ЦАП, таким как AD9136, можно использовать для значительного упрощения традиционного приемопередатчика IDU при одновременном повышении его производительности.Ссылаясь на рисунок 2, верхняя линейка приемопередатчиков показывает реализацию прямого преобразования, используемую для поддержки обычно низких ПЧ приемника и передатчика 140 МГц и 400 МГц соответственно. Проблемы архитектуры приемопередатчиков с прямым преобразованием хорошо задокументированы, но их можно решить с помощью калибровки I / Q-баланса, коррекции смещения постоянного тока, настраиваемой I / Q-фильтрации в основной полосе частот и тщательной разработки диплексера для подавления утечки передатчика. В то время как унаследованные трансиверы IDU, поддерживающие максимальную полосу пропускания канала 56 МГц и 256 QAM, производятся сегодня, увеличение полосы пропускания канала в 2 раза и уровня QAM до 8 раз для большей пропускной способности создает серьезные проблемы для архитектуры прямого преобразования.Последние достижения в области высокоскоростных АЦП / ЦАП способны вытеснить классические подходы с цифровым внутренним блоком, как показано на рисунке 2. Для реализации нижнего приемопередатчика требуется всего четыре ИС, чтобы обеспечить почти идеальную производительность при значительно менее строгих требованиях к фильтрации.
Рис. 2. Сравнение устаревшей архитектуры приемопередатчика IDU с «прямым преобразованием» и архитектуры приемопередатчика IDU с использованием высокоскоростного ЦАП / АЦП для прямого цифрового синтеза и оцифровки сигналов Tx и Rx QAM.
На стороне передатчика высокоскоростной ЦАП, такой как AD9136, работающий с тактовой частотой 1,6 GSPS, может синтезировать сигнал QAM 112 МГц, 1024, центрированный на ПЧ, с исключительными характеристиками EVM, так что большая часть бюджета ошибок канала передатчика может быть уменьшена. зарезервировано для ODU (где аддитивные эффекты фазового шума и линейности приведут к большей части ухудшения EVM). Хотя для подавления первого изображения ЦАП, падающего на частоте 1,2 ГГц, требуется фильтр нижних частот, теперь его можно ослабить до 12 дБ относительно фильтра подавления гармоник гетеродина, необходимого для фильтрации изображения гетеродина третьего порядка I / Q-модулятора. который также падает на 1.2 ГГц. Управление мощностью передачи для преодоления потерь в кабеле может выполняться в AD9136 с незначительным ухудшением характеристик EVM сигнала QAM в диапазоне 15 дБ.
На стороне приемника AD6676 оцифровывает канал QAM 112 МГц, 1024 с исключительным динамическим диапазоном и точностью даже при наличии большого количества утечек передатчика из-за ослабления фильтра диплексера, как показано на рисунке 3. В этом примере AD6676 был сконфигурирован для поддержки полосы пропускания канала 112 МГц с аттенюатором, установленным на 3 дБ, так что эффективный RTI NF в предусилителе HMC740 оставался около 10 дБ.Левый график на рисунке 3 показывает реакцию БПФ выходных данных Σ-Δ АЦП AD6676 (используется только для демонстрационных целей), где утечка передатчика –26 дБмВт с центром на частоте 400 МГц сочетается с непрерывным тональным сигналом –17,2 дБмВт на частоте 143 МГц, представляющим сигнал. Обратите внимание, что формирование собственного шума настраиваемого полосового Σ-Δ АЦП очевидно в области высокого динамического диапазона с центром вокруг желаемой ПЧ (до –160 дБ полной шкалы / Гц). Правый график на рисунке 3 показывает отклик FT 16-битных I / Q-данных с частотой 20 MSPS, центрированных вокруг нулевой ПЧ после цифрового преобразования с понижением частоты и децимационной фильтрации с 16-кратным увеличением.Обратите внимание, что цифровой фильтр обеспечивает подавление +85 дБ, чтобы удалить внеполосный шум и сигнал утечки передатчика от наложения спектров обратно в полосу пропускания 112 МГц. Остаточный шум, выходящий за пределы полосы пропускания 12 МГц, удаляется RRC-фильтрами модема.
Рисунок 3. Измеренные возможности динамического диапазона линейки Rx, состоящей из HMC740 с AD6676 до и после цифрового преобразования с понижением частоты до нулевой ПЧ.
Внутриполосный шум (IBN) в условиях тестирования большого CW-сигнала, равного –2 дБ полной шкалы, составил –68.6 дБFS. Если полномасштабный сигнал 1024 QAM Rx, имеющий отношение пикового значения к среднеквадратичному значению 10 дБ, должен был заменить этот тон CW, для предотвращения ограничения АЦП потребовалась бы дополнительная задержка на 7 дБ. В этом случае входная мощность IDU приемника будет на уровне –9 дБ полной шкалы (или –24,2 дБмВт), что предполагает значение CNR около 60 дБ. С точки зрения упрощения конструкции фильтра диплексера, подавление диплексера между передатчиком и приемником теперь будет примерно 20 дБ, чтобы подавить сигнал передатчика –6 дБм, так что он появляется на входе предусилителя приемника –26 дБм.Для случаев развертывания с более короткими кабелями между IDU и ODU, аттенюатор AD6676 может быть увеличен, чтобы выдерживать более высокие уровни QAM от ODU.
Способность приемника IDU по-прежнему восстанавливать сигнал QAM на очень низких уровнях чувствительности (BER <10-6 с включенным FFC) в присутствии ближайшего нежелательного сигнала является важной характеристикой. Возможно, самый сложный тест (согласно ETSI EN 301390 V1.2.1) - это когда тональный сигнал источника помех (блокиратор) CW, имеющий мощность на 30 дБ выше, чем сигнал QAM, устанавливается только на 2.5-кратное смещение канала от желаемого сигнала QAM. Обратите внимание, что фильтры неисправных или переключаемых банков, используемые в современных приемниках, в основном определяются этой спецификацией, поскольку модем должен поддерживать полосу пропускания канала от 3,5 МГц до 56 МГц. Предыдущий пример представляет случай ширины полосы канала 12 МГц следующего поколения, в котором можно предположить, что соседний источник помех CW в достаточной степени подавлен фиксированным канальным фильтром 12+ МГц, который также выполняет подавление изображения перед последним этапом понижающего преобразования в радиочастотной цепочке ODU.Фактически, тот же самый фильтр должен обеспечивать достаточное подавление блокировок на смещениях 70 МГц и 140 МГц для случаев ширины полосы канала 28 МГц и 56 МГц. Для ширины полосы канала 14 МГц или ниже тональный сигнал CW будет попадать в полосу пропускания этого фильтра; таким образом, необходимо либо отбросить дополнительную полосовую фильтрацию на частоте 140 МГц, либо оцифровать с помощью АЦП, а затем отфильтровать цифровым способом.
Архитектура приемника IDU на базе AD6676 имеет мгновенный динамический диапазон для поддержки этого сценария без дополнительной фильтрации.На рисунке 4 показана частотная характеристика AD6676 FT
той же самой линейки приемников, что и на рисунке 3, за исключением того, что настраиваемая полоса пропускания Σ-Δ АЦП была уменьшена до 56 МГц. В этом примере непрерывный тональный сигнал 32 дБм на частоте 175 МГц (или отстройка 35 МГц) был добавлен к постоянно присутствующему сигналу утечки передатчика –26 дБм на частоте 40 МГц. Этот тон CW соответствует входному уровню –17 дБFS, передаваемому AD6676, и должен быть на 30 дБ выше, чем –47 дБFS, 1024 QAM при минимальной чувствительности (CNR = 36 дБ). Тональный сигнал источника помех CW может быть увеличен еще на 15 дБ, тем самым подчеркивая избыточный расчетный запас, который может быть отнесен к вкладу шума микроваттной / радиочастотной схемы.В отсутствие блокировщика желаемый уровень сигнала 1024 QAM может быть увеличен на 38 дБ, предлагая дополнительный динамический диапазон для приемника IDU для борьбы с замираниями.
Рис. 4. Расширенный динамический диапазон AD6676 упрощает требования к фильтрации Rx за счет устойчивости к большим соседним источникам помех.
Те же преимущества высокого динамического диапазона, которые AD6676 предлагает для конструкции IDU, также могут быть использованы для полной конструкции приемника ODU. На рисунке 5 показано, как AD6676 может использоваться в линейке приемников для ODU с диапазоном частот от 18 ГГц до –23 ГГц в сочетании с линейкой, состоящей из сбалансированного ВЧ-смесителя, такого как ADL5801, микшера с подавлением изображения µВт, такого как HMC966, и RF VGA, например ADL5246.Обратите внимание на то, что другие диапазоны мкВт в диапазоне от 6 ГГц до 43 ГГц могут поддерживаться с выбором различных микшеров с подавлением изображения в мкВт, PL PL и, возможно, первой частоты ПЧ. В случае полного ODU, когда нет кабеля для ограничения выбора ПЧ, AD6676 может быть настроен на более высокую ПЧ, например, 300 МГц, чтобы еще больше упростить требования к ВЧ-фильтрации для подавления изображения. Если для какого-либо из более крупных паразитных компонентов смесителя требуется дополнительное подавление, AD6676 может подключаться к ВЧ-смесителю напрямую или через простой верхний низкочастотный фильтр третьего порядка.Радиочастотный фильтр на частоте 1960 МГц рассчитан на поддержку полосы пропускания канала до 12 МГц. Если аттенюатор AD6676 установлен на 0 дБ, суммарный минимальный уровень шума ADL5801 и AD6676 будет ниже –157 дБFS / Гц для полосы пропускания канала 56 МГц, что дает эквивалентный коэффициент шума 17 дБ. Общий коэффициент преобразования по умолчанию от ADL5246 и HMC966 может быть изначально оптимизирован с мгновенным динамическим диапазоном ADL5801 / AD6676, так что цифровой модем отслеживает начальное замирание (от номинальных уровней входной мощности приемника).Порог AGC ADL5246 может быть установлен таким образом, что он начинает увеличивать свое усиление на уровне, когда BER приемника модема падает ниже заранее определенного уровня для указанного уровня сигнала QAM. Этот гибридный подход будет активировать АРУ только при очень низких уровнях входного сигнала, чтобы улучшить минимальный уровень чувствительности приемника.
Рис. 5. Приемник ПЧ AD6676 также может быть использован при разработке линейки высокопроизводительных ODU Rx.
Резюме
Приемники точка-точка следующего поколения должны поддерживать полосу пропускания канала от 3.От 5 МГц до 112 МГц, работающая с более высоким динамическим диапазоном, чтобы поддерживать все более высокие уровни M-QAM при более широких пределах замирания. Подсистема приемника ПЧ AD6676 обеспечивает общую двухточечную платформу µW, которая поддерживает устаревшие системы разделения IDU / ODU, а также новые платформы ODU. Для сплит-систем IDU / ODU его исключительно высокий динамический диапазон гарантирует, что отличная точность модуляции (EVM) может поддерживаться в присутствии соседних сигналов помех без необходимости использования сложных настраиваемых или громоздких фильтров переключаемого банка.Для полных систем ODU его высокий мгновенный динамический диапазон (с прямым интерфейсом к смесителю) уменьшает диапазон АРУ ВЧ, необходимый для отслеживания замираний, и упрощает требования к фильтрации ВЧ. AD6676 доступен в компактном 80-выводном корпусе WLCSP размером 4,3 × 5,0 м и работает от источника питания 2,5 В и 1,1 В.
SM 5 BSZ — Измерение динамического диапазона приемника
Традиционные измерения
В основном есть два типа измерений:IMD , измерения интермодуляции позволяют количественно оценить нелинейности путем измерения смешивания продукция производится при двух сильных сигналах поступают в приемник одновременно.
BDR , измерения блокировки определяют, насколько сильна единственный нежелательный сигнал может быть до того, как он начнет ухудшить полезный сигнал.
Измерения интермодуляционных искажений обычно количественно выражаются одним номер, точка пересечения. Концепции IP2 и IP3 хорошо описаны во многих мест, поэтому нет причин повторять здесь основы.
IP2 и IP3 обычно указываются в виде уровней мощности в дБмВт.Такие цифры бессмысленны, если не уровень шума. указывается при этом. Посредственное радио с IP3 -20 дБм, казалось бы, могло быть преобразованным в хороший с IP3 + 10dBm просто добавив перед ним аттенюатор 30 дБ, если влияние на минимальный уровень шума не принималось во внимание.
Точно так же значения BDR, часто указываемые как дБ, не имеют смысла. если не указана полоса пропускания.
Сравнение значений IP3
Чтобы провести честное сравнение между различными значениями IP3, разумно предположить, что хороший предусилитель присутствует как первая ступень.Прирост первой ступени — дело вкуса. Пока шум от первой ступени создает небольшой вклад в общий уровень шума, это нормально пренебрегать этим. С современными технологиями нет причин для первый усилитель с коэффициентом шума выше 2 дБ, что означает, что приемники с коэффициентом шума выше 6 дБ можно сравнить напрямую, если IP3 выражается как дБн / Гц.Другой способ сказать то же самое — сказать, что приемник с коэффициентом шума 6 дБ и выше должен полностью подчиняться шуму предстоящих сцен после нелинейности, ограничивающей динамический диапазон.Поэтому такие приемники можно сравнивать, используя только одно число, расстояние от максимальной мощности уровень от нелинейной составляющей (обычно смесителя) минимальному уровню шума усилителя, который следует за ним.
Если коэффициент шума очень низкий, преобладающий вклад должен быть первый предусилитель. Если бы только 0,1 дБ потеря S / N системы допустима, 97,5% шума должно исходить от предусилитель, что означает, что минимальный уровень шума поднимается на 16 дБ и значения IP3 будут на 16 дБ ниже при выражении в дБн / Гц по сравнению с тем же радиоприемником без предусилителя.
Значения IP2 и IP3 должны быть указаны как количество дБ выше минимального уровня шума на один Гц каждый из двух одинаково сильные сигналы должны быть столь же сильными, как и продукты интермодуляции при экстраполяции от низкого до высокого уровня.
Указанные таким образом значения IP не изменятся, если аттенюатор вставлен. Уровни IP3 в дБн / Гц дают хорошее сравнение приемники с коэффициентом шума 6 дБ и выше.Приемники VHF / UHF с гораздо более низким коэффициентом шума теряют некоторый динамический диапазон из-за шума первого усилитель звука.
Вместо того, чтобы указывать точку пересечения в дБн / Гц можно указать динамику без интермодуляции диапазон путем экстраполяции уровня интермодуляции вниз к минимальному уровню шума. Двухтональный динамический диапазон IMD третьего порядка (2/3) * IP3 в то время как динамический диапазон IMD второго порядка составляет (1/2) * IP2
Сравнение значений BDR
Значения BDR, измеренные при разной полосе пропускания, могут быть представлены с общей стандартизированной полосой пропускания 1 Гц.Для этого нужно просто добавить значение в дБ, 10 * log10 (Bw), так что измерения выполняются, например, при полосе пропускания 500 Гц настраиваются добавлением 27 дБ.К сожалению, сравнение значений BDR не очень точное. потому что указанная полоса пропускания часто бывает неточной. В частности, это влияет на измерения, сделанные в полосе пропускания SSB. звуковой частотной характеристикой тестируемого приемника.
Звуковой отклик может быть далеко не ровным по уважительным причинам.Это например, вполне приемлемо для радио, чтобы компенсировать плохой отклик на низкие звуковые тона для динамика в небольшая коробка с большим усилением звука на соответствующих звуковых частотах. Звуковой отклик — дело вкуса. Он может иметь наклон на 10 дБ в ту или иную сторону, и это не вообще влияют на реальную производительность радио.
Процедура измерения BDR путем определения частоты при котором получается самый сильный сигнал, а затем найти то, что уровень сигнала требуется для вдвое большей мощности, чем минимальный уровень шума должен быть связан с фактическим шумом пропускная способность, включая звуковой отклик, а не номинальную пропускная способность фильтра ПЧ.(Здесь важно использовать истинный вольтметр RMS) Это измерение является MDS (минимально различимый сигнал). и он дает уровень сигнала, который дает такую же мощность как минимальный уровень шума. (сумма + 3дБ)
Ширина полосы шума является интегралом спектрального отклика. в линейной шкале мощности по всем частотам. Для идеального прямоугольного отклика он становится равным ширине полосы. Для фильтров, которые имеют наклон на 10 дБ по звуковому диапазону, вообще редко, шумовая полоса намного уже, чем номинальная полоса ПЧ и значения BDR неправильно становятся лучше, чем они есть на самом деле, если используется номинальная пропускная способность для сравнения.
Измерение минимального уровня шума, поскольку значение MDS вводит в заблуждение случае звуковой отклик не ровный, а пропускная способность с измерением связана полоса пропускания фильтра ПЧ. Представляя значение MDS как дБм / Гц, человек, выполняющий измерение берет на себя ответственность за исправление любые подобные эффекты аудиоусилителя.
Значение MDS, выраженное в дБм / Гц, напрямую связано с коэффициент шума.Любой резистор комнатной температуры, независимо от его значение сопротивления доставит -174 дБм / Гц на резистор того же сопротивления, которое удерживается на абсолютном нуле температура 0 К. Два резистора при одинаковой температуре дадут одинаковую мощность. друг к другу, потому что они находятся в тепловом равновесии. Приемник с коэффициентом шума 6 дБ обеспечит В 4 раза больше шума по сравнению с идеальным бесшумным приемником при подключении к резистору комнатной температуры.Это определение коэффициента шума. Очевидно, что значение MDS в дБм / Гц преобразуется в NF путем добавления 174 дБм / Гц.
В частности, на УКВ и СВЧ частотах измеряется коэффициенты шума непосредственно с помощью измерителя коэффициента шума, а не оценивает правильную полосу пропускания и измеряет значение MDS.
Уровень сигнала блокировки — это уровень сигнала снаружи. полоса пропускания, которая снижает отношение сигнал / шум полезного сигнала на небольшое количество.Если «небольшая сумма» определяется как 3 дБ, Значения BDR в дБн / Гц становятся напрямую сопоставимыми с измерения боковой полосы шума, которые обычно выполняются на передатчиках. Для близких частотных разносов значения BDR должны быть шум ограничен и равен передаваемому шуму на такое же частотное разделение для современного трансивера.
Некоторые цифры для современного трансивера.
Чтобы получить реальные цифры для современного трансивера, мы можем используйте измерения ICOM IC-756PROII, выполненные ARRL и опубликовано в февральском выпуске QST за 2002 год.Ниже используются значения на 14 МГц, а полоса пропускания 500 Гц. предполагается равной истинной ширине полосы шума.Уровень шума, MDS, составляет -131 дБм, -139 дБм и -141 дБм соответственно. для выключенного предусилителя: предусилитель один и предусилитель два соответственно. Эти значения соответствуют -158 дБм / Гц, -166 дБм / Гц и -168 дБм / Гц. и выраженные в виде коэффициента шума, значения составляют 16 дБ, 8 дБ и 6 дБ.
Динамический диапазон IMD третьего порядка составляет 97/95/91 дБ при разносе 20 кГц. и 76/75/72 дБ при интервале 5 кГц при полосе пропускания 500 кГц для выключенного предусилителя / первого предусилителя / второго предусилителя.При отнесении динамических диапазонов IMD к более узкой полосе пропускания цифры не растут на коэффициент пропускной способности. Когда минимальный уровень шума снижается на X дБ из-за более узкой полосы пропускания, два тестовых сигнала должны быть уменьшены на X / 3 дБ для третьего порядка Продукты IM переходят на новый уровень шума. Поэтому динамический диапазон интермодуляционных искажений изменяется на две трети диапазона коэффициент пропускной способности. Относится к значениям динамического диапазона IMD с единичной полосой пропускания для IC-756 стать 115/113/109 дБн / Гц и 94/93/90 дБн / Гц.Из этих значений можно сделать вывод, что IP3 находится на 172,5 / 169,5 / 163,5 дБн / Гц для разделения 20 кГц и 141 / 139,5 / 135 дБн / Гц при разносе 5 кГц.
Измеренные значения IP3 составляют + 20,2 / + 10,2 / -4,1 дБм и -18,8 / -28,8 / -35,5. дБм. Когда мы вычитаем минимальный уровень шума, получаем следующие значения для IP3 в дБн / Гц: 178,2 / 176,2 / 163,9 и 139,2 / 137,2 / 132,5. Значения 20 кГц отличаются примерно на 6 дБ от IP3. значения, выведенные из диапазонов интермодуляционных искажений третьего порядка по неизвестным причинам.
Динамический диапазон блокировки составляет 118/116/111 дБ и 100/97/94 дБ. для 20 кГц и 5 кГц соответственно. В единичной полосе пропускания эти значения соответствуют 145/143/138 дБн / Гц и 127/124/121 дБн / Гц.
При сравнении с широкополосным цифровым радио важно чтобы иметь больше данных, чем то, что предоставляется в измерениях ARRL. Цифровой ресивер внезапно перегружается очень сильными паразитными помехами. сигнализирует, как следствие, если входной сигнал выходит за пределы диапазона аналого-цифрового преобразователя.Если, например, полоса пропускания 100 кГц отфильтровывается и дискретизируется аналого-цифровым преобразователем, мгновенное напряжение, производимое всеми сигналами в полосе пропускания, время от времени становится очень высоким. Он никогда не должен превышать предел насыщения A / D. Для аналогового приемника соответствующий уровень сигнала — это Точка сжатия 1 дБ. Аналоговые приемники не дают такой резкости ограничение как D / A, поэтому такое сравнение не совсем справедливо по отношению к аналогу приемник, но это гораздо более разумно, чем ограниченные шумом значения BDR.
На практике можно сказать, что сжатие на 1 дБ происходит на 15 дБ ниже. IP3. Это означает, что компрессия 1 дБ для IC-756PROII составляет 163 дБн / Гц или при 157 дБн / Гц в зависимости от того, какой из приведенных выше результатов для IP3 используется. Было бы очень интересно иметь точку сжатия 1 дБ на уровне также большее частотное разделение. Это могло быть немного лучше или даже намного лучше.
В случае, если BDR аналогового приемника ограничен шумом на 100 кГц разделения нечестно сравнивать точку насыщения 1 дБ с точка насыщения цифровой системы.Важное число — это BDR, обсуждение компрессии на 1 дБ. был предназначен для указания уровня насыщенности BDR. ограничено. Для IC-756 разумно предположить, что это происходит при частотное разделение около 100 кГц.
Сравнение аналоговых и цифровых приемников
Наиболее критичным числом для цифрового радио является уровень шума по отношению к уровню насыщения. В технических данных это обычно выражается как SNR. значение (отношение сигнал / шум) при полной полосе пропускания.Типичный аналогово-цифровой радиосигнал, AD6644 от аналоговых устройств обычно дает Отношение сигнал / шум 74 дБ при частоте дискретизации 65 МГц. Когда выражено в единстве пропускной способности, точка насыщения (на 1 дБ выше тестового уровня) становится 150 дБс / Гц по отношению к минимальному уровню шума. Это примерно на 10 дБ ниже, чем у IC-756. Для более широкой полосы пропускания он будет еще менее благоприятным.
Подобных и даже лучших результатов можно добиться, используя аудио конвертеров высшего класса, но это действительно сложно (или невозможно) превзойти аналоговое радионасыщение с широкополосным цифровой дизайн.
С другой стороны, аналоговое радио обычно имеет шумовые ограничения значительно ниже точка насыщения из-за шума боковой полосы гетеродина. Этого легко избежать в широкополосной цифровой конструкции. Если бы стандартные измерения BDR были выполнены в широкополосной конструкции, числа при 20 кГц и 5 кГц будут близки к 150 дБн / Гц. При более широких разносах IC-756 должен достичь BDR 160 дБн / Гц. или, возможно, 170 дБн / Гц, но широкополосный цифровой дизайн останется при 150 дБн / Гц также для больших частотных разносов.
Пока широкополосные аналого-цифровые преобразователи не улучшатся примерно на 20 дБ нужно будет добавить некоторую аналоговую схему для фильтрации требуется перед чипом. В большинстве случаев это означает, что аналого-цифровое преобразование выполняется на некоторая частота ПЧ и что используется фильтр с фиксированной частотой. Это именно то, что мы видим в современных трансиверах, таких как IC-756. Перестраиваемые предусилители, по одному на каждую полосу — еще одна возможность. Несложный дизайн и отличная производительность BDR, так как нет используется переменный гетеродин.
Сам аналого-цифровой преобразователь и последующая цифровая обработка у него нет нормального поведения с квадратичными и кубическими рост искажений второго и третьего порядков. Аналоговые схемы, предшествующие аналого-цифровому преобразователю, имеют однако нормальное поведение, поэтому измерения интермодуляции актуальны.
Полоса пропускания сигнала, поступающего на аналого-цифровой преобразователь, составляет очень важный. Если заблокирован динамический диапазон 160 дБн / Гц. адекватно при полосе пропускания 40 кГц, потребуется 166 дБн / Гц для полосы пропускания 80 кГц с аргументом, что вдвое больше сильные сигналы будут присутствовать при удвоении полосы пропускания.В сумме они будут иметь удвоенную амплитуду. Это произойдет реже в два раза, но для аналого-цифрового преобразователя этого вообще не должно происходить.