Размер матрицы видеокамеры какой лучше: Размер матрицы. Что это такое?
Типы и размеры матриц камер видеонаблюдения
Разберем характеристику первой попавшейся камеры.
| Матрица | 1/4″ Progressive Scan CMOS |
| Эффективных пикселей | 1Мп, 1280 х 720 |
Такие характеристики вы встретите на странице каждой камеры, меняются лишь значения. Как понять, что вам нужно и на какие данные стоит обратить внимание в первую очередь? Ведь матрица — это и есть та главная часть камеры, которая получает изображение, как фотопленка в старых фотоаппаратах.
Рассмотрим типы матриц. И начнем от обратного. Матрицы, не использующиеся Hikvision — CCD-матрицы.
По сравнению с технологией CMOS, которую применяет в своих камерах Hikvision, CCD-матрицы позволяют создавать высококачественное изображение. В процессе съемки возникает гораздо меньше шумов, а бороться с все же возникшими намного легче, чем в матрицах CMOS.
Еще одним важным показателем является их высокая эффективность. Например, коэффициент заполнения у матриц CCD приближается к 100%, а соотношение зарегистрированных матрицей фотонов к их общему числу — 95%. Если сравнивать с нашими глазами, то при расчёте в тех же единицах соотношение составит только 1%.
К недостаткам CCD-матриц можно отнести сложность процесса. Для фиксации изображения в камере необходимо дополнительное наличие целого перечня устройств. Это приводит к более высокому энергопотреблению, делает их дороже в производстве и «капризнее» в эксплуатации.
Теперь о CMOS-матрицах.
Главное достоинство CMOS-матриц — более низкое энергопотребление и возможность произвольного считывания ячеек, а это CCD-матрице недоступно, там считывание происходит одновременно. Благодаря произвольному считыванию в CMOS-матрицах нет размазывания изображения.
Еще одно достоинство – расположение значительной части электроники непосредственно на ячейке, благодаря этому появляются широкие возможности управления матрицей и изображением.
При всех имеющихся достоинствах данной технологии, недостатков хватает. Главный — незначительный размер светочувствительного элемента в соотношении к общей площади пикселя. Одно из основных достоинств – расположения электроники на ячейке. Но из него вытекает еще один недостаток — значительная часть площади пикселя занята электроникой, а значит, уменьшена площадь светочувствительного элемента.
В то же время нельзя не отметить, что CMOS был модифицирован несколько лет назад, и для видеонаблюдения CMOS-матрицы действительно подходят лучше (благодаря чёткому изображению, низкому энергопотреблению и возможности уменьшать битрейт видео.
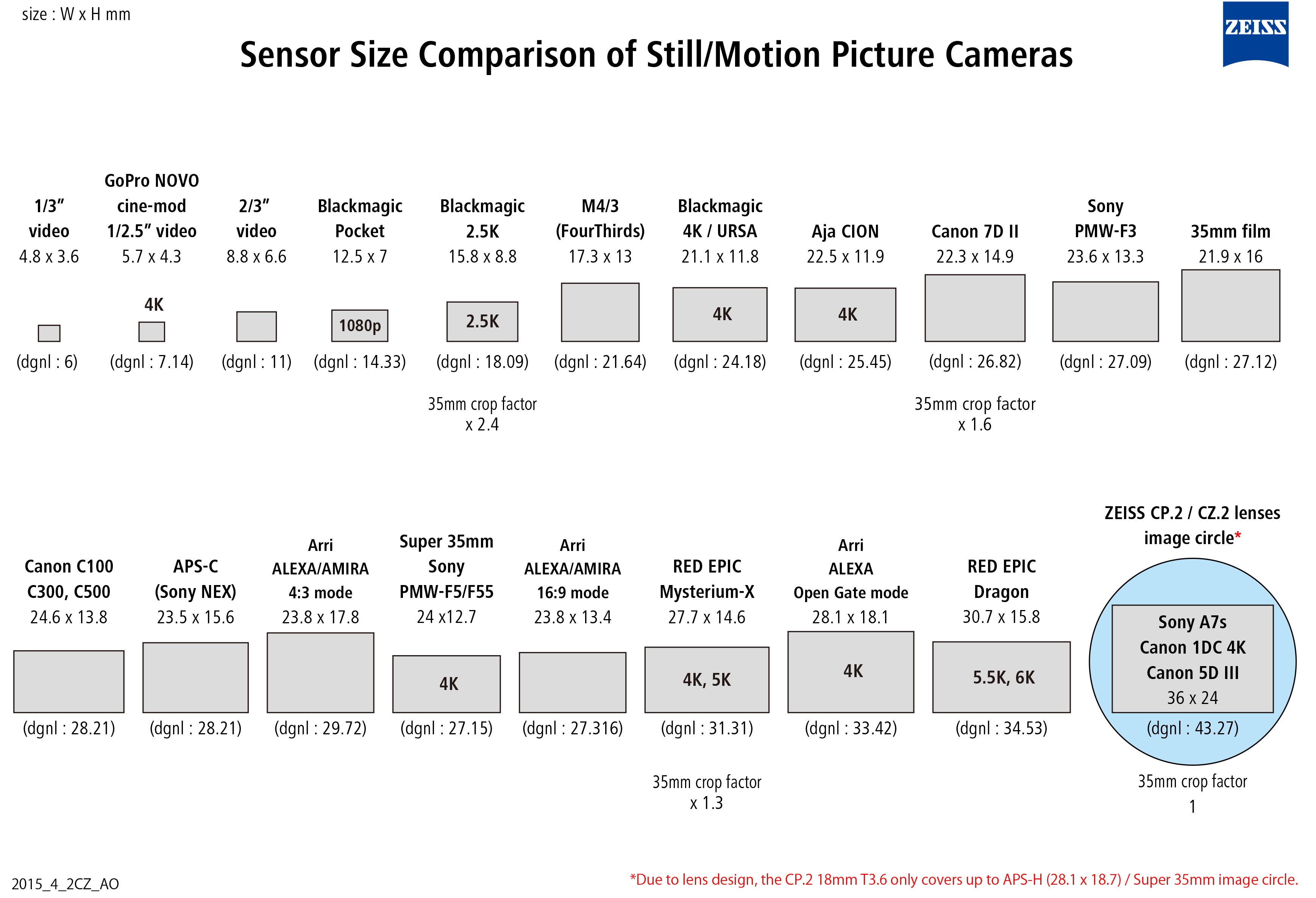
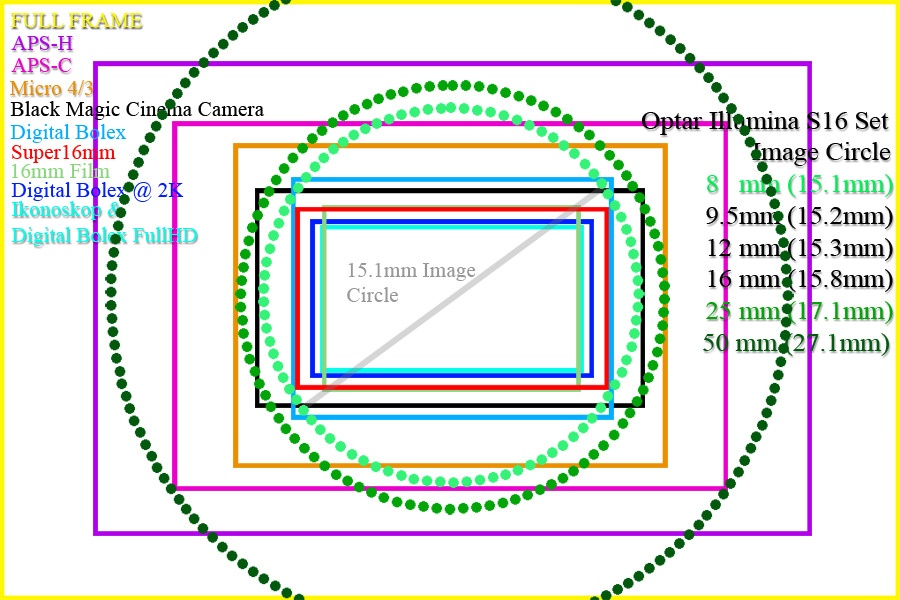
Матрицы для видеокамер бывают разного физического размера: 1/2″, 1/3″, 1/4″, 1/6″ и т.д. Чем больше физический размер матрицы, тем лучше качество картинки. Но и цена камеры растет вместе с размером матрицы. Размер такого «дюйма» — 16 мм, (унаследовано от видикона диаметром 1″, рабочая диагональ там была именно 16 мм), и называется он «видиконовый дюйм».
Это то, что стоит знать при выборе камеры, рассматривая гипотетическую ситуацию (с преувеличенными значениями), 10-мегапиксельная камера с матрицей 1/10″ будет давать большое изображение довольно скверного качества. Представьте, как мало фотоинформации будет получать камера, при примерно 10. 000. 000 пикселей на матрицу с диагональю 1.6 мм.
Характеристики видеокамер
На рынке современных систем видеонаблюдения огромный выбор видеокамер различных производителей, поэтому в этой статье мы решили рассказать о основных характеристиках видеокамер и разберемся с наиболее востребованными функциями.
Типы матриц видеокамер
Одним из основных элементов видеокамеры является матрица — устройство которого осуществляет преобразование света попадающего на нее в электрический сигнал. Существует два типа матриц: CCD и КМОП у каждой из которых есть свои преимущества и недостатки.
Существует два типа матриц: CCD и КМОП у каждой из которых есть свои преимущества и недостатки.
|
CCD Матрица
|
КМОП Матрица |
|
Последовательное считывание данных из ячеек
|
Произвольное считывание данных из ячеек
|
|
Низкий уровень шумов
|
Высокий уровень шума |
|
Высокая динамическая чувствительность, позволяет эффективно фиксировать движущиеся объекты
|
При съемке быстро движущихся объектов могут наблюдаться горизонтальные полосы |
|
Матрица состоит только из светочувствительно элемента осуществляющего преобразования света в электрический сигнал |
Матрица имеет на борту обрабатывающие устройств АЦП и управляющие элементы, что делает ее производство простым и недорогим
|
|
Эффективность использования матрицы приближается к 100 % из-за использования всей поверхности матрицы по назначению: преобразование сигнала
|
Меньшая чувствительность матрицы |
|
Высокая стоимость и сложное производство
|
Низкое энергопотребление и быстродействие |
Справедливо заметить, что современные КМОП матрицы практически ничем не уступают CCD матрицам и идеально подойдут для систем видеонаблюдения для которых не предъявляется повышенных требований.
Размер матрицы видеокамеры
Размер матрицы определяется диагональю в дюймах и записывается дробью 1/2.5, 1/2.7, 1/2.8, 1/3, 1/4. Считается, чем больше размер матрицы тем выше качесвто детализации, глубина резкости картинки, меньше шумов и больше угол обзора, однако лучшее качество изображения обеспечивает не размер матрицы видеокамеры, а размер ее отдельного пикселя или ячейки и чем он больше, тем лучше.
Если матрицы с размерами 1/3″ и 1/4″ имеют равное количество пикселей, то матрица с диагональю 1/3″, будет давать лучшее изображение. Если же на ней пикселей больше, то нужно подсчитывать примерный размер пикселя. Сделать это очень просто:
P = x/b * 1000
где, P = размер пикселя в мкм, x — разрешение видеокамеры по вертикали или горизонтали (например для 2Мп видеокамеры можно взять разрешение по горизонтали 1920), b — размер матрицы камеры по горизонтали или вертикали (например для матрицы 1/3″ это значение для горизонтали 4. 8 мм) и умножить на 1000, чтобы перевести результат в микрометры.
8 мм) и умножить на 1000, чтобы перевести результат в микрометры.
К примеру, во многих случаях размер пикселя на матрице 1/4″ оказывается большим, чем на матрице 1/3″, а значит, видеоизображение с 1/4″ , хотя она и меньше по размеру, будет лучше, что и видно из таблицы на которой представлены наиболее распространенный размеры матриц в системах видеонаблюдения.
Матрица может быть с соотношением сторо 4:3 и 16:9, следовательно у матриц с одной и той же диагональю будут разные физические размеры, поэтому видеокамеры с разными соотношениями сторон будут иметь разные вертикальные и горизонтальные углы обзора.
|
Формат
|
Диагональ |
Количество пикселей, млн |
Размер ячейки, мкм |
|
1/4 |
4. |
1.55 |
2.50 |
|
1/3
|
5.64 |
3.1 |
2.35 |
 23
23
Разрешение
Разрешение матрицы видеокамеры один из важнейших параметров, который определяет размер, соответственно и детализацию полученной картинки. Разрешение измеряется в телевизионных линия ТВЛ или пикселях.
Разрешение видеокамеры в ТВЛ — это количество вертикальных линий, размещенных на картинке по горизонтали. ТВЛ более точны, поскольку дают представление именно о размере картинки на выходе, тогда как разрешение в мегапикселях, указываемое в документации производителя, может вводить покупателя в заблуждение — оно часто относится не к размеру итоговой картинки, а к числу пикселей на матрице.
Разрешение в пикселях — это размер картинки по горизонтали и вертикали, если он указывается в виде 640Х480, 1280Х720, 1920Х1080 и т.д. или общее количество пикселей на картинке указывается как 0,3 Мп; 1Мп, 2 Мп (мегапиксель), 3Мп, 5Мп, 8Мп.
Частота кадров
Частота кадров влияет на плавность видеоизображения. Считается что камера показывает в реальном времени при 25 к/с в PAL или 30 к/c в NTSC, при этом изображение можно наблюдать без резких переходов до 18-20 кадров. В штатных системах видеонаблюдения этого вполне достаточно. Однако существуют специализированные высокоскоростные камеры, кадровка которых может значительно превышать стандартные значения.
Чувствительнсть
Чувствительность видеокамеры, измеряется в ЛК (Lux люксах). От этого параметра зависит способность видеокамеры видеть ночью и в условиях плохой освещенности. Чем меньше этот параметр, тем лучше.
Чем меньше этот параметр, тем лучше.
Типовая освещённость
|
Освещённость, лк
|
Где |
|
10−5 |
Свет сириуса, ярчайшей звезды ночного неба |
|
0,0003 |
Безлунное звёздное небо |
|
0,01 |
Четверть Луны |
|
0,27 |
Полнолуние в ясном небе |
|
1 |
Полнолуние в тропиках |
|
до 20 |
В море на глубине ~50 м. |
|
50 |
Жилая комната |
|
80 |
Подъезд/туалет |
|
100 |
Очень пасмурный день |
|
320-500 |
Рабочий кабинет |
|
350±150 |
Восход или закат |
|
400 |
Восход или закат в ясный день. |
|
1000 |
Пасмурный день; освещение в телестудии |
|
1-3 тыс. |
Полдень на Венере |
|
4-5 тыс. |
Полдень в декабре — январе. |
|
10-25 тыс. |
Ясный солнечный день (в тени) |
|
32-130 тыс. |
Под прямым солнцем |
Фокусное расстояние и угол обзора
Фокусное расстояние — это расстояние между линзой и матрицей видеокамеры. Стоит запомнить следующее правило: чем меньше фокусное расстояние, тем больше угол обзора видеокамеры и наоборот, чем больше фокусное расстояние, тем меньше угол обзора видеокамеры. Фокусное расстояние записывается как f= … мм.
Из рисунка видно, что если требуется минимальным количеством обзорных камер видеонаблюдения следить за периметром, стоит установить видеокамеру с малым фокусным расстоянием и наоборот если требуется идентификация деталей: денежных купюр, автомобильных номеров, лиц, стоит подбирать фокусное расстояние объектива видеокамеры с большим значением.
Углы обзора 1/3″ видеокамер
|
Фокусное расстояние, мм |
Угол обзора по вертикали, град |
Угол обзора по горизонтали, град |
Угол обзора по диагонали, град |
|
2. |
90 | 120 | 160 |
|
2.9 |
78 | 104 | 130 |
|
3.4 |
70 | 94 | 110 |
| 3.5 | 63 | 79 | 98 |
| 3.6 |
54 | 72 | 92 |
| 3.7 | 52 | 70 | 90 |
| 4.0 | 48 | 65 | 75 |
| 4.3 | 47 | 62 | 73 |
5. 5 5 |
40 | 55 | 70 |
| 6.0 | 32 | 42 | 53 |
| 8.0 | 24 | 32 | 40 |
| 12.0 | 17 | 22 | 28 |
| 16.0 | 12 | 17 | 21 |
| 25.0 | 8 | 11 | 14 |
| 50.0 | 4 | 5.5 | 7 |
| 75.0 | 2.8 | 3.7 | 4.6 |
 5
5
Типы объективов
В зависимости от поставленной задачи, к видеокамере подбирается объектив, либо подбирается видеокамера с уже установленным объективом.
- Фиксированный объектив. Подбирается под заранее определенную задачу, обладает фиксированным фокусным расстоянием, а значит и угол обзора фиксированный. Например объектив с минимальным фокусным расстоянием f=2.5 мм.
- Вариофокальный объектив. Может менять фокусное расстояние путем ручной настройки, благодаря чему объектив может быть донастроен под определенную сцену в процессе эксплуатации. Например объектив с зумом 4,28 f=2.8-12мм
- Моторизированный объектив. По сути тот же вариофокальный объектив, только с приводом и схемой управления позволяющей удаленно менять фокусное расстояние объектива под определенную сцену.
- Рыбий глаз. Благодаря панорамному объективу позволяет добиться обзора в 360 градусов. Изображение с такой камеры не всегда удобно для наблюдения и анализа, поэтому разбивается на отдельные направления специальными программами.
- Пинхол объектив. Объектив с игольное ушко, используется при реализации скрытых систем видеонаблюдения
Тип крепления объектива
- C — крепление.
 Устаревший тип крепления, в настоящее время не применяется в системах охранного телевидения. Определяется резьбой 2.54мм и расстоянием заднего фланца от ПЗС матрицы видеокамеры в 17,526 мм.
Устаревший тип крепления, в настоящее время не применяется в системах охранного телевидения. Определяется резьбой 2.54мм и расстоянием заднего фланца от ПЗС матрицы видеокамеры в 17,526 мм. - CS — крепление. Данный тип крепления используется в существующих системах видеонаблюдения. Определяется расстоянием заднего фланца от ПЗС матрицы видеокамеры в 12,5 мм.
- M12. Используется в модульных видеокамерах небольшого размера.
 Устаревший тип крепления, в настоящее время не применяется в системах охранного телевидения. Определяется резьбой 2.54мм и расстоянием заднего фланца от ПЗС матрицы видеокамеры в 17,526 мм.
Устаревший тип крепления, в настоящее время не применяется в системах охранного телевидения. Определяется резьбой 2.54мм и расстоянием заднего фланца от ПЗС матрицы видеокамеры в 17,526 мм.
Светосила объектива (F-число или относительное отверстие)
Относительное отверстие ирисовой диафрагмы определяет количество света попадающего через объектив на матрицу. Меньшее значение F — числа соответствует наибольшему раскрытию диафрагмы и наоборот большее значение, соответствует минимальному раскрытию диафрагмы. Соответственно чем меньше F — число тем картинку лучшего качества можно получить в условиях плохой видимости и чем больше F — число, тем лучше изображение можно корректировать в условиях фоновой засветки. При минимальном F — числе достигается большее значение глубина резкости.
При минимальном F — числе достигается большее значение глубина резкости.
Способ корректировки диафрагмы:
- Вручную. Данный тип объективов применяется в закрытых помещениях с фиксированным освещением.
- Автоматическая диафрагма. Объектив автоматически подстраивается под текущий уровень освещенности.
Электорнный затвор AES
Электронный затвор — это выдержка, интервал времени с которым свет попадающий на матрицу считывается с нее. Выражается он как 1/50 — 1/100000 с. Чем меньше значение выдержки, тем быстрее свет считывается с матрицы не успевая накапливаться на ней, поэтому применяется при отслеживании быстродвижущихся объектов или объектов в условиях высокой фоновой засветки. Большое значение экспозиции применяется в условиях плохой освещенности, однако в результате большого времени накопления зарядов на матрице движущиеся объекты будут смазываться.
Стоит отметить, что возможности электронного затвора значительно слабее автоматической диафрагмы, поэтому применять его желательно внутри помещений.
Отношение сигнал/шум
Измеряется в децибелах (Дб). Cигнал/шум показывает, насколько хорош может быть видеосигнал видеокамеры, в условиях низкой освещенности. Шума избежать невозможно, но его можно минимизировать. В основном, он зависит от качества ПЗС-матрицы, электроники и внешних электромагнитных воздействий, но также в сильной степени и от температурных флуктуаций электроники.
Современные камеры видеонаблюдения имеют отношение сигнал/шум в 50Дб.
Подавление шумов DNR
В настоящее время существуют две технологии подавления шумом:
- 2-DNR. Устаревшая технология, которая убирала шумы в основном ближнего плана, кроме того, иногда изображение из-за обработки немного смазывалось
- 3-DNR. Распространенная в настоящее время технология, которая убирает не только ближние шумы, но и снег, зернистость на дальнем фоне.
 Распространенная в настоящее время технология, которая убирает не только ближние шумы, но и снег, зернистость на дальнем фоне.
Распространенная в настоящее время технология, которая убирает не только ближние шумы, но и снег, зернистость на дальнем фоне.
ИК подсветка
Инфракрасная подсветка позволяет работать камере видеонаблюдения в условиях плохой освещенности. Дело в том, что матрица видеокамеры может «видеть» в инфракрасном диапазоне. В дневное время суток инфракрасный фильтр ICR отсекает излучение в ИК диапазоне, когда уровень освещения падает, при достижении порогового значения ICR фильтр отключается и включается ИК подсветка.
Основные характеристики ИК подсветки:
- Дальность ИК подсветки
- Угол ИК подсветки
- Длина волны на которой работает ИК подсветка
Компенсация засветки HLC, BLC, WDR, DWDR
Данные функции направленны на компенсацию разности фонов в кадре видеокамеры, свет фар, фонарей, тень-яркий свет.
HLC. Данная технология просто маскирует источники сильной засветки в кадре, чтобы можно было различать другие детали. Наглядный пример автомобильные фары в ночное время суток.
BLC. Данная функция реализуется путем увеличения экспозиции всего изображения позволяя в какой то мере выровнять разность фонов. Функция присутствует в большинстве бюджетных видеокамер и не особо эффективна при больших разностях фонового освещения.
WDR. Видеокамеры с реализованной на аппаратном уровне функцией WDR (расширенным динамическим диапазоном) позволяет получить максимально качественную картинку при большой разности фонового освещения в кадре. Например человека в темной комнате на фоне окна или навеса в тени граничащего с сильным солнечным светом. Данная функция присутствует в дорогих видеокамерах.
D-WDR. WDR реализованный на программном уровне, значительно уступает аппаратному WDR и присутствует в большинстве бюджетных видеокамерах.![]()
IP Класс защиты видеокамеры от влаги и пыли
Класс IP определяет степень защиты от попадания внутрь посторонних предметов и влаги. Первая цифра определяет степень защиты от попаданию внутрь посторонних предметов, а вторая показывает степень защиты от влаги.
Например большинство уличных видеокамер использующихся в системах видеонаблюдения обладают степенью защиты IP66 что соответствует полной защите от пыли и защите от мощных водяных струй.
Степень защиты IP
|
Степень защиты |
Описание |
IP x0 |
IP x1 |
IP x2 |
IP x3 |
IP x4 |
IP x5 |
IP x6 |
IP x7 |
IP x8 |
|
|
Нет защиты | Защита от капель выды падающих верти-кально |
Защита от капель воды падающих под углом 15 гр. |
Защита от дождя | Защита от водных брызг |
Защита от водных брызг под давле-нием |
Защита от мощных водяных струй | Защита от погру-жения в воду на глубину не более 1 м |
Защита от затопления (глубина указы-вается отдельно) |
|
|
IP 0x |
Нет защиты | IP00 | ||||||||
|
IP 1x |
Защита от частиц > 50.0 мм | IP10 | IP11 | IP12 | ||||||
|
IP 2x |
Защита от частиц > 12.5 мм | IP20 | IP21 | IP22 | IP23 | |||||
| IP 3x | Защита от частиц > 2. 5 мм 5 мм |
IP30 | IP31 | IP32 | IP33 | IP34 | ||||
| IP 4x | Защита от частиц > 1.0 мм | IP40 | IP41 | IP42 | IP43 | IP44 | ||||
| IP 5x | Защита от пыли частично | IP50 | IP54 | IP55 | ||||||
| IP 6x | Полная защита от пыли | IP60 | IP56 | IP66 | IP57 | IP68 |
Степень защиты от механических воздействий IK
В техническом паспорте видеокамер вы можете найти такой параметр, как IK отображающий степень защиты устройства от механических воздействий в соответствии со стандартом EN50102
|
Код IK |
Энергия удара (Дж) |
|
00 |
Нет защиты |
|
01 |
0. |
|
02 |
0.2 |
|
03 |
0.35 |
|
04 |
0.5 |
|
05 |
0.7 |
|
06 |
1 |
|
07 |
2 |
|
08 |
5 |
|
09 |
10 |
|
10 |
20 |
 15
15
OSD меню
Благодаря данному меню специалист в ручном режиме может настроить параметры видеокамеры под требуемую задачу. Переход в меню может осуществляться несколькими способами:
- Локально. Благодаря беспроводному ИК пульту, встроенному в видеокамеру или выносному джойстику.
- Удаленно. Доступ в меню осуществляется удаленно с сервера видеонаблюдения или регистратора.
 Благодаря беспроводному ИК пульту, встроенному в видеокамеру или выносному джойстику.
Благодаря беспроводному ИК пульту, встроенному в видеокамеру или выносному джойстику.
Перечислим наиболее распространненные функции которые вы можете настроить в OSD меню:
ATW — автоматический настройка баланс белого. Видеокамера сама подстраивает баланс белого в зависимости от освещенности зоны наблюдения, что позволяет дать более точную цветовую передачу картинки.
AWB — функция аналогичная ATW, но баланс белого настраивается один раз: при включении видеокамеры.
ATR — Данная функция осуществляет выборочную компенсацию для улучшения контраста объектов, а также воспроизведение цветов в случае, когда в изображении есть области более яркие или затемненные.
AGC — автоматическое усиление видеосигнала посредством процессорной DSP обработки.![]()
DIS — Функция цифровой стабилизации изображения при работе камера в условиях вибрации или движения
Интеллектуальная ИК подсветка. Самостоятельно подстраивает уровень излучения ИК подсветки, позволяя компенсировать засветку ближних объектов. Стоит заметить, что у ряда производителей эта функция частенько дает сбой и приводит к более быстрому выгоранию ИК светодиодов.
Low light. Функция позволяющая работать видеокамере в условиях плохой видимости без ИК подсветки
Функция DNR описанная выше
Настройка функций HLC, BLC, WDR, D-WDR описанных выше
Порог чувствительности определяющий переход видеокамеры в ночной и дневной режим.
Возможность зеркального переворота изображения по горизонтали и вертикали
Настройка изображения манипулируя такими параметрами как контраст, насыщенность, яркость, резкость картинки
Настройка экспозиции
Режим настройки цветности в котором могут быть такие параметры как чернобелая картинка, цветная, пользовательский режим, коррекция ATW или AWB
Так же в камере видеонаблюдения вы можете встретить такую функцию как настройка детектора движения, позволяющая камере собственными силами фиксировать движение в кадре наблюдения. При этом в данной функции настраивается область детектирования движения и чувствительность реакции.
При этом в данной функции настраивается область детектирования движения и чувствительность реакции.
Приватные области. Данная функция позволяет затемнять необходимые области.
Настройка имени, которое будет отображаться в углу экрана камеры видеонаблюдения
Настройка параметров протокола RS-422/485
Надеемся наша статья помогла вам узнать что то новое и остановиться в выборе. Безопасная Кубань выполняет монтаж, установку, настройку и обслуживание систем видеонаблюдения по Краснодару и Югу России
Вернуться
Камеры — основы оптотехники
Основы работы с камерами
Камера — это устройство дистанционного зондирования, которое может захватывать и сохранять или
передавать изображения. Свет собирается и фокусируется через оптический
система на чувствительной поверхности (сенсор), которая преобразует интенсивность и
частоты электромагнитного излучения к информации, через
химические или электронные процессы.
Простейшая система такого рода состоит из темной комнаты или ящика в
в который свет попадает только через маленькое отверстие и фокусируется на противоположном
стене, где его можно увидеть невооруженным глазом или зафиксировать на светочувствительном
материал (например, фотопленка). Этот метод визуализации, который восходит к
века, называется «камера-обскура» (от латыни «темная комната») и дала
имя современным камерам.
Технологии камер значительно улучшились за последние десятилетия. разработка устройства с зарядовой связью (CCD) и, совсем недавно, CMOS технологии. Предыдущие стандартные системы, такие как камеры с вакуумными трубками, снято с производства. Улучшения в разрешении изображения и захвате скорость, очевидно, также улучшила качество и скорость машинного зрения камеры.
Размеры сенсора и разрешение
Важной характеристикой камеры является размер сенсора (или формат ):
это указывает на размеры датчика изображения и его форм-фактор. Обычно этот параметр выражается в дюймах (и долях
дюймы). Однако фактические размеры датчика отличаются от
значение дроби, что часто вызывает недоумение у пользователей. Этот
практика восходит к 50-м годам во времена телевизионных трубок и является
все еще стандарт в эти дни. Обычные круглые трубки для видеокамер диаметром 1 дюйм.
имеют прямоугольную фоточувствительную область с диагональю около 16 мм, поэтому
цифровой датчик с размером диагонали 16 мм эквивалентен 1 дюйму.
Кроме того, всегда целесообразно проверить технические характеристики датчика, поскольку
даже два датчика одного формата могут немного отличаться
размеры и пропорции.
Обычно этот параметр выражается в дюймах (и долях
дюймы). Однако фактические размеры датчика отличаются от
значение дроби, что часто вызывает недоумение у пользователей. Этот
практика восходит к 50-м годам во времена телевизионных трубок и является
все еще стандарт в эти дни. Обычные круглые трубки для видеокамер диаметром 1 дюйм.
имеют прямоугольную фоточувствительную область с диагональю около 16 мм, поэтому
цифровой датчик с размером диагонали 16 мм эквивалентен 1 дюйму.
Кроме того, всегда целесообразно проверить технические характеристики датчика, поскольку
даже два датчика одного формата могут немного отличаться
размеры и пропорции.
Пространственное разрешение количество активных элементов
(пикселей), содержащихся в области сенсора: чем выше разрешение, тем
меньше размер пикселя и, следовательно, тем мельче детали, которые
можно обнаружить на изображении. Важно отметить, что датчики
могут иметь одинаковые размеры, но разное разрешение, поскольку пиксель
размер может варьироваться. Хотя для данного формата сенсора меньшие пиксели приводят к
более высокое разрешение, меньшие пиксели не всегда идеальны, поскольку они
менее чувствительны к свету и создают более высокий уровень шума; а еще объектив
разрешение и размер пикселя всегда должны быть правильно согласованы, чтобы обеспечить
оптимальная производительность системы.
Хотя для данного формата сенсора меньшие пиксели приводят к
более высокое разрешение, меньшие пиксели не всегда идеальны, поскольку они
менее чувствительны к свету и создают более высокий уровень шума; а еще объектив
разрешение и размер пикселя всегда должны быть правильно согласованы, чтобы обеспечить
оптимальная производительность системы.
Камеры с матричным и линейным сканированием
Камеры, используемые в приложениях машинного зрения, можно разделить на две части группы: камеры с площадным сканированием (также называемые матричными камерами) и линейное сканирование камеры. Первые проще и менее технически требовательны, в то время как последние предпочтительнее в некоторых ситуациях, когда матричные камеры не подходящий. Камеры с областным сканированием захватывают 2D-изображения, используя определенное количество активные элементы (пиксели), в то время как датчики камер линейного сканирования характеризуется одним массивом пикселей.
Типы датчиков: ПЗС и КМОП
КМОП и ПЗС — две наиболее важные и распространенные технологии на рынке датчиков изображения.
ПЗС (устройство с зарядовой связью) являются датчиками на основе на массиве пассивных фотодиодов, который интегрирует заряд во время время экспозиции камеры. Затем заряд переносится на общий электроника, которая считывает накопленные заряды разных пикселей и переводит их в напряжения.
Поскольку ПЗС является устройством с пассивными пикселями (т. е. без электроники на уровень пикселей) квантовая эффективность очень высока: это преимущество в приложениях, где свет довольно плохой. Кроме того, поскольку электроника одинакова для всех пикселей (или, по крайней мере, для пикселей того же столбца) может быть достигнута высокая однородность пикселей. На с другой стороны, передача заряда происходит довольно медленно, что приводит к низкому кадру скорости (обычно <20 кадров в секунду), а технология ПЗС-сенсоров не стандарт, что делает их довольно дорогими.
КМОП (комплементарный металл-оксид-полупроводник) датчики на основе массива активных пикселей: уровень пикселей
электроника (обычно 3 или 4 транзистора) переводит заряд
накапливается в фотодиоде при определенном напряжении; таким образом,
выход каждого пикселя нужно только получить и сэмплировать.
Поскольку вывод пикселей зависит от напряжения (а не от заряда), с датчиками CMOS можно достичь более высокой частоты кадров благодаря упрощенная схема считывания и возможность определить интересующую область (ROI) для приобретения. Эта схема считывания имеет недостаток использовать более высокий шум из-за транзисторов считывания в каждом пикселе и из-за так называемого фиксированного шума: неоднородность в изображения из-за несоответствия между различными схемами пикселей.
Глобальный и скользящий затвор (CMOS).
С глобальным и скользящим затвором в литературе упоминается способ захвата и считывания изображения.
С рольставней схема считывания экспозиции время одинаково для всех пикселей датчиков (см. рисунок: длина голубых полосок одинакова для всех рядов матрица), но есть задержка между экспозицией одной строки и следующей.
Иными словами, эта архитектура является «последовательной»: считывание происходит сразу после времени экспозиции строки.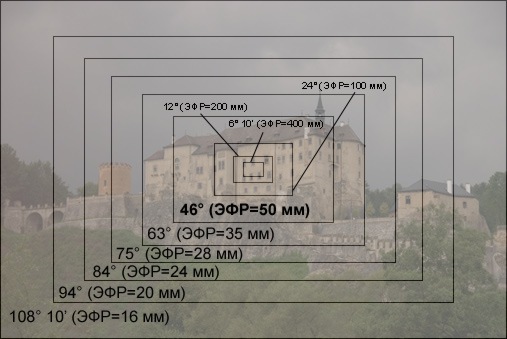
Эта схема дает изображение, которое не все захвачено одновременно,
а скорее немного сдвинуты во времени: это может быть проблемой в быстрых
приложение, требующее высокой частоты кадров.
Напротив, время экспозиции глобального затвора датчики начинаются и заканчиваются одновременно (см. рисунок: в этом случае все красные полосы выровнены). Таким образом, информация, предоставленная каждым пиксель относится к тому же интервалу времени, в течение которого было получено изображение. Здесь только считывание является последовательным, но измеренное напряжение относится к один точный момент времени для всего массива. Датчик такого типа обязательно для высокоскоростных приложений.
Монохромные датчики цвета VS
После процесса получения каждый пиксель изображения обеспечивает
информация об уровне серого: обычно квантование основано на 256 оттенках серого.
уровней (если разрешение 8 бит), 1024 уровня (10 бит) или 4096 (12 бит)
кусочек).
Таким образом, изображение получается монохромным (черно-белым).
Для отображения цветного изображения необходимы как минимум 3 координаты: красная координата, зеленая координата и синяя координата. Эти 3 значения могут быть выражено так же, как монохромное изображение, с диапазоном 256, 1024 или 4096 уровней для всех 3 каналов.
В следующем примере представлены некоторые цвета:
- Белый (R=255, G=255, B=255)
- Черный (0,0,0)
- Зеленый (0,255,0)
- Желтый ( 255,255,0)
- Фиолетовый (255,0,255)
Для получения информации о цвете необходимо выполнить два шага.
Первым шагом является размещение над всей матрицей датчиков цветного фильтра: наиболее распространенным является фильтр Байера (см. рисунок). Его типичный образец состоит из 50% зеленого пикселя , 25% красного пикселя и 25% синего пикселя , расположенных, как на рисунке выше.
Например, в зеленом пикселе только входящие лучи, чьи
длина волны около 550 нм (т. е. зеленый свет) может проходить через фильтр
слоя и может поглощаться датчиком (см. нижний рисунок).
е. зеленый свет) может проходить через фильтр
слоя и может поглощаться датчиком (см. нижний рисунок).
Лучи с другой длиной волны отклоняются.
После сбора заряда вторым шагом является восстановление информация о цвете для всех пикселей: эта операция называется демозаика (или дебайеризация).
Например, пиксель P(3,2) содержит информацию только о синем цвете, поскольку его цветной фильтр синий. Для получения также красной и зеленой координат возможный выбор состоит в том, чтобы вычислить два значения путем усреднения ближайшего красный и зеленый пиксель.
В этом случае красное значение будет равно:
`Red_(3,2)=(Red_(2,1)+Red_(2,3)+Red_(4,1)+Red_(4,3) ))/4`
И значение зеленого будет равно:
`Green_(3,2)=(Green_(2,2)+Green_(3,1)+Green_(3,3)+Green_( 4,2))/4`
С большой маской, используемой для усреднения, можно получить более точный цвет.
получается, но, с другой стороны, алгоритм будет тяжелее и,
следовательно, время обработки будет больше.
Подводя итог, какие параметры следует учитывать при выборе между монохромным и цветным датчиком?
- Датчик цвета необходим при работе с приложениями, в которых важна информация о цвете.
Очевидно, что если приложению требуется цветное изображение, единственным выбором является использовать датчик цвета (например, осмотр и контроль качества Приложения).
- Датчик цвета работает медленнее .
В то время как для монохромного датчика каждый пиксель обычно описывается 8 бит, для датчика цвета каждый пиксель имеет 8 бит для красного канала, 8 бит для зеленого канала и 8 бит для синего канала, так что три раза количество данных, подлежащих обработке, что приводит к более высокой обработке время и, следовательно, более медленная частота кадров.
- Монохромный датчик может достигать более высокого разрешения .
В цветной камере наличие фильтра Байера может способствовать
снижают производительность с точки зрения оптического разрешения системы. Кроме того, алгоритм демозаики также может вносить ошибки в
реконструкция цвета.
Кроме того, алгоритм демозаики также может вносить ошибки в
реконструкция цвета.
Следовательно, если информация о цвете не требуется, предпочтение следует отдавать монохромному датчику.
Характеристики сенсора
Дефекты пикселей
Дефекты пикселей могут быть трех видов: горячие, теплые и битые пиксели. Горячий пиксели — это элементы, которые всегда насыщаются (дают максимальный сигнал, например, полный белый) в зависимости от интенсивности света. Битые пиксели ведут себя наоборот, всегда давая нулевой (черный) сигнал. Теплые пиксели создают случайные сигнал. Эти виды дефектов не зависят от интенсивности и время экспонирования, чтобы их можно было легко удалить – напр. в цифровом виде заменяя их средним значением окружающих пикселей.
Шум
Существует несколько типов шума, которые могут повлиять на реальный пиксель.
зачитать. Они могут быть вызваны геометрическими, физическими и электронными факторами. факторов, причем они могут быть как случайными, так и постоянными. Некоторый
из них представлены ниже:
факторов, причем они могут быть как случайными, так и постоянными. Некоторый
из них представлены ниже:
- Дробовой шум является следствием дискретного природа света. Когда интенсивность света очень низкая — как это считается малая поверхность одного пикселя – относительное колебание число фотонов во времени будет значительным, точно так же, как вероятность орла или решки значительно далека от 50% при подбрасывании монета всего несколько раз. Это колебание и есть дробовой шум.
- Шум темнового тока вызвано электронами, которые могут быть случайно произведены тепловым эффект. Количество тепловых электронов, а также связанный с ними шум, растет с температурой и временем воздействия.
- Шум квантования связано с преобразованием непрерывного значения исходного (аналоговое) значение напряжения к дискретному значению обрабатываемого (цифрового) Напряжение.
- Шум усиления вызван разницей
в поведении разных пикселей (по чувствительности и коэффициенту усиления). Это пример «постоянного шума», который можно измерить и
устранено.
 Это пример «постоянного шума», который можно измерить и
устранено.
Это пример «постоянного шума», который можно измерить и
устранено.Чувствительность
Чувствительность — это параметр, количественно определяющий реакцию датчика на свет. Чувствительность строго связана с квантовой эффективностью, т.е. доля фотонов, эффективно преобразованных в электроны.
Динамический диапазон
Динамический диапазон — это отношение между максимальным и минимальным сигналом который улавливается датчиком. На верхнем пределе пиксели кажутся белый для каждого более высокого значения интенсивности (насыщенности), в то время как пиксели кажутся черными на нижнем пределе и ниже.
Динамический диапазон обычно выражается логарифмом
минимальное-максимальное отношение, либо в базе 10 (децибелы), либо в базе 2 (удвоения или
остановки), как показано ниже. Человеческие глаза, например, могут различать объекты
как при свете звезд, так и в яркий солнечный день, что соответствует 90
дБ разница в интенсивности. Этот диапазон, однако, не может быть использован
одновременно, так как глазу нужно время, чтобы приспособиться к разному освещению
условия.
Этот диапазон, однако, не может быть использован
одновременно, так как глазу нужно время, чтобы приспособиться к разному освещению
условия.
ЖК-дисплей хорошего качества имеет динамический диапазон около 1000:1, а некоторые последние датчики CMOS имеют динамический диапазон около 23000:1. (зарегистрировано как 14,5 остановок).
SNR
SNR (отношение сигнал/шум) учитывает наличие шума, так что теоретическое самое низкое значение серого, определенное динамическим диапазоном, составляет часто невозможно достичь. SNR представляет собой отношение между максимальным сигналом и общий шум, измеренный в дБ. Максимальное значение для SNR составляет ограничено дробовым шумом (это зависит от физической природы света и это неизбежно) и может быть аппроксимировано как
`SNR_max = sqrt [«максимальная емкость насыщения в электронах одного пикселя»]`
SNR задает предел уровней серого, которые имеют смысл в изображении.
преобразование между аналоговым сигналом (непрерывным) и цифровым
(дискретный). Например, если максимальное отношение сигнал-шум составляет 50 дБ, хорошим выбором будет
8-битный датчик, в котором 256 уровней серого соответствуют 48 дБ.
Например, если максимальное отношение сигнал-шум составляет 50 дБ, хорошим выбором будет
8-битный датчик, в котором 256 уровней серого соответствуют 48 дБ.
Использование датчика с более высоким уровнем серого означало бы регистрацию определенной степени чистого шума.
Спектральная чувствительность
Спектральная чувствительность – это параметр, характеризующий эффективность
интенсивность света регистрируется на разных длинах волн. Глаза человека имеют
три различных типа фоторецепторов, различающихся по чувствительности к
видимых длин волн, так что общая кривая чувствительности представляет собой
сочетание всех трех. Системы машинного зрения, обычно основанные на ПЗС
или CMOS камеры, обнаруживают свет от 350 до 900 нм, с зоной пика
быть между 400 и 650 нм. Различные виды датчиков также могут охватывать
УФ-спектр или, с другой стороны, ближний инфракрасный свет, прежде чем
переход на совершенно другую технологию для дальних длин волн, таких как
SWIR или LWIR.
Микролинзы
Особенно на КМОП-сенсорах каждая активная область пикселя окружена и увенчаны схемой и металлическими соединениями, отвечающими за изображение зачитать. Это значительно уменьшает количество света, которое может быть успешно обнаружено. Если световые лучи не перпендикулярны поверхности сенсора еще хуже, так как они отражаются ближним соединения на металлических слоях сенсорного чипа.
Почти все современные датчики изображения покрыты массивом микролинзы. Эти линзы собирают падающий свет и фокусируют его на чувствительной области пикселя, тем самым увеличивая чувствительность сенсора.
Сдвиг микролинз
Обычно микролинзы центрируются над активной областью каждого пикселя независимо от их относительного положения на поверхности сенсора.
Однако некоторые датчики, особенно предназначенные для фото/
потребительский рынок, могут быть оснащены микролинзами, которые постепенно
смещается по мере того, как мы идем от центра к углу датчика. Это
необходимо для получения лучшей однородности чувствительности по датчику, когда
он используется с обычными объективами, которые не телецентричны на датчике
сторона. CRA находится под углом 0° в центре датчика и может достигать нескольких
градусов на его углу.
Это
необходимо для получения лучшей однородности чувствительности по датчику, когда
он используется с обычными объективами, которые не телецентричны на датчике
сторона. CRA находится под углом 0° в центре датчика и может достигать нескольких
градусов на его углу.
Микролинзы без смещения:
Микролинзы со смещением:
Поскольку эти датчики оптимизированы для нетелецентрических линз, они приводит к снижению производительности при использовании с телецентрическими объективами. Большинство явный эффект виньетирование, но и какие-то оптические аберрации может появиться.
Датчики с задней подсветкой
Как показано выше, схема, окружающая активную область пикселя
сильно снизить светочувствительность сенсора, только частично
компенсируется использованием микролинз. С последней режущей кромкой
Технология изготовления позволяет построить датчик в перевернутом виде
вниз. В этом процессе, после создания фотодиодов, транзисторов
и металлических межсоединений, микросхема переворачивается вверх дном и
механически полируется до прежнего «дна» кремниевого чипа
незащищенный. Таким образом, активная область пикселя находится в верхней части сенсора.
и ему больше не мешает схема считывания.
Таким образом, активная область пикселя находится в верхней части сенсора.
и ему больше не мешает схема считывания.
Различные параметры, описывающие характеристики и качества датчика собраны и последовательно описаны в EMVA стандарт 1288. Этот стандарт иллюстрирует основные параметры, которые должно быть дано, чтобы полностью описать реальное поведение датчика вместе с четко определенными методами измерения, чтобы получить эти параметры.
Стандартные параметры:
- Чувствительность, линейность сигнала в зависимости от интенсивности света и шума
- Темновой ток (температурная зависимость: опционально)
- Неоднородность сенсора и дефектные пиксели
- Спектральная чувствительность (опционально)
Время экспозиции — время, в течение которого свет
может достигать датчика. Чем выше это значение, тем выше
количество света, представленное на результирующем изображении. Увеличение
время выдержки — первое и самое простое решение, когда света недостаточно
но он не свободен от проблем: во-первых, шум всегда увеличивается с ростом
время контакта; Кроме того, при работе с движущимися объектами могут появляться эффекты размытия.
объекты. На самом деле, если время экспозиции слишком велико, объект будет
отпечатаны на нескольких разных пикселях, вызывая известный
Эффект «размытия движения». Кроме того, слишком длительное время экспозиции может привести к
передержка, а именно, когда количество пикселей достигает максимальной емкости
и поэтому кажутся белыми, даже если интенсивность света на каждом пикселе
на самом деле отличается. Наконец, длительное время экспозиции снижает максимальное
частота кадров достижима.
Увеличение
время выдержки — первое и самое простое решение, когда света недостаточно
но он не свободен от проблем: во-первых, шум всегда увеличивается с ростом
время контакта; Кроме того, при работе с движущимися объектами могут появляться эффекты размытия.
объекты. На самом деле, если время экспозиции слишком велико, объект будет
отпечатаны на нескольких разных пикселях, вызывая известный
Эффект «размытия движения». Кроме того, слишком длительное время экспозиции может привести к
передержка, а именно, когда количество пикселей достигает максимальной емкости
и поэтому кажутся белыми, даже если интенсивность света на каждом пикселе
на самом деле отличается. Наконец, длительное время экспозиции снижает максимальное
частота кадров достижима.
Частота кадров. Это частота, на которой
полное изображение захватывается датчиком, обычно выражается в кадрах
в секунду (fps). Понятно, что частоту кадров нужно подгонять под
применение: линия, проверяющая 1000 бутылок в минуту, должна иметь возможность
снимать изображения с минимальной частотой кадров 1000/60 = 17 кадров в секунду.
Запуск . Большинство камер дают возможность контролировать начало процесса приобретения, подстраивая его под приложение. Типичная триггерная система — это система, в которой свет активируется вместе с получением изображения после получения ввода от внешнего устройства (например, датчика положения). Эта техника важно при съемке движущихся объектов, чтобы убедиться, что интересующие особенности находятся в поле зрения системы визуализации.
Коэффициент усиления в цифровой камере представляет собой способ увеличение количества сигнала, принимаемого датчиком изображения. Увеличение усиления означает также увеличение шума изображения, так что общее SNR останется неизменным.
Таким образом, увеличение усиления не повышает качество изображения! Так, усиление камеры должно использоваться как последнее средство для увеличения яркость (только когда пользователь не может работать с освещением, экспозицией время и F#).
Биннинг — это функция камеры, которая сочетает в себе
считывание соседних пикселей на датчике, обычно в строках/столбцах, больше
часто в квадратах 2 x 2 или 4 x 4. Хотя разрешение очевидно
снижается, улучшается ряд других характеристик. Например,
при биннинге 2х2 разрешение уменьшается вдвое, но чувствительность и динамика
радиус действия увеличивается в 4 раза (поскольку возможности каждого
потенциальные ямы суммируются), время считывания уменьшается вдвое (частота кадров удваивается)
и шум четвертуется.
Хотя разрешение очевидно
снижается, улучшается ряд других характеристик. Например,
при биннинге 2х2 разрешение уменьшается вдвое, но чувствительность и динамика
радиус действия увеличивается в 4 раза (поскольку возможности каждого
потенциальные ямы суммируются), время считывания уменьшается вдвое (частота кадров удваивается)
и шум четвертуется.
Выравнивание датчика изображения
Надлежащее выравнивание датчика камеры требует высокой точности и очень жестких допусков. Небольшие отклонения от номинальных значений могут значительно снизить достижимое качество изображения и помешать пользователю в полной мере использовать преимущества выбранного им объектива.
Ошибки выравнивания сенсора могут привести к следующим макроскопически наблюдаемым проблемам.
Неверное заднее фокусное расстояние
Смещение датчика по оси Z может привести к неправильному заднему фокусному расстоянию. Это приводит к заметной неспособности правильно сфокусировать систему. Из-за изменения рабочего расстояния оптики общая производительность системы снижается — это снижение производительности системы можно наблюдать как увеличение хроматических аберраций и/или искажений.
Из-за изменения рабочего расстояния оптики общая производительность системы снижается — это снижение производительности системы можно наблюдать как увеличение хроматических аберраций и/или искажений.
Виньетирование по углам изображения
Перемещение датчика по осям X и Y может вызвать виньетирование по углам изображения. В зависимости от объектива можно заметить изменения виньетирования даже при небольших движениях сенсора. Степень этого эффекта зависит от размера круга изображения объектива.
Перемещение сенсора по осям X и Y вызывает виньетирование по углам изображения.
Изображение повернуто относительно корпуса камеры
Вращение датчика по оси Z может привести к повороту изображения относительно корпуса камеры. Этот эффект вызывает большую озабоченность при использовании объективов, которые не имеют круглых кругов изображения, таких как серия Opto Engineering TC CORE®
. Вращение датчика по оси Z приводит к повороту изображения относительно корпуса камеры.
Размытые края изображения
Наклон сенсора может привести к размытию краев изображения. Наклон датчика изменяет плоскость фокусировки, сопряженную с плоскостью датчика (эффект Шеймпфлюга). Например, если пользователь фокусирует объектив, чтобы получить четкое изображение в центре изображения, края изображения будут выглядеть размытыми. Величина этого эффекта обратно пропорциональна глубине резкости системы.
Наклон сенсора приводит к размытию краев изображения.
Выравнивание датчика ITALA
Чтобы наши камеры не страдали ни от одной из вышеупомянутых проблем, все камеры серии ITALA тестируются, чтобы убедиться, что наклон и поворот датчика находятся в пределах соответствующих пороговых значений и соответствуют нашим строгие стандарты качества.
Битовая глубина, Полная ячейка и Динамический диапазон
Введение
Камеры — жизненно важная технология в научной визуализации, работающая как интерфейс между светом и цифровым изображением. Существует ряд шагов, необходимых для преобразования фотонов сигнала из вашего образца в изображение, которое вы видите на мониторе вашего компьютера, каждый шаг имеет переменные и факторы, которые могут изменить способы создания изображений. Битовая глубина — одна из этих переменных. Поняв, как она может повлиять на ваши изображения и улучшить ваши эксперименты, вы сможете проводить более эффективные и информированные исследования изображений. Путь от света к образу показан в Рис.1 :
Существует ряд шагов, необходимых для преобразования фотонов сигнала из вашего образца в изображение, которое вы видите на мониторе вашего компьютера, каждый шаг имеет переменные и факторы, которые могут изменить способы создания изображений. Битовая глубина — одна из этих переменных. Поняв, как она может повлиять на ваши изображения и улучшить ваши эксперименты, вы сможете проводить более эффективные и информированные исследования изображений. Путь от света к образу показан в Рис.1 :

Этот процесс одинаков для всех технологий камер, но изменения на каждом из этих шагов могут оптимизировать конечный результат. Некоторые важные факторы камеры, которые следует учитывать перед обсуждением битовой глубины, — это полная емкость и динамический диапазон.
Полная емкость лунки и динамический диапазон
Поскольку фотоны преобразуются в электроны пикселем датчика, электроны сохраняются в кремниевой подложке пикселя, известной как «колодец». В разных моделях камер или в разных режимах одной и той же камеры эти пиксели имеют разное полной емкости , что является максимальным количеством электронов, которые они могут хранить и отображать в виде изображения. Некоторые камеры предлагают полные лунки до 80 000 электронов, что означает, что можно отображать чрезвычайно яркие образцы, тогда как некоторые намного ниже (100–1000), что означает, что они подходят для более низких уровней сигнала. Полную лунку следует рассматривать, если уровень вашего образца очень высок (изображение в светлом поле), если ваш образец может становиться значительно ярче и меняться со временем или если вы пытаетесь отобразить яркие и тусклые объекты на одном изображении. Однако большинство флуоресцентных ламп имеют низкий уровень сигнала и подходят для более низкой полной емкости лунки.
Однако большинство флуоресцентных ламп имеют низкий уровень сигнала и подходят для более низкой полной емкости лунки.
Динамический диапазон камеры связан с полной емкостью лунки и описывает соотношение между самым высоким и самым низким сигналом, который может быть отображен. Это вычисляется путем простого деления полной емкости лунки на шум считывания, поскольку они представляют соответственно максимальный и минимальный считываемые сигналы. Динамический диапазон помогает анализировать изменения в вашем образце. Как узнать, что ваш сигнал удвоился, если датчик не может его зафиксировать?
В этой статье описывается еще один фактор научных камер, влияющий как на полную емкость скважины, так и на динамический диапазон, а именно сенсор камеры битовая глубина, , а также как наилучшим образом согласовать ваше приложение и уровень сигнала с подходящей битовой глубиной.
Что такое битовая глубина?
Датчики камеры преобразуют фотоны в электроны, и эти электроны усиливаются в напряжение, которое является «аналоговым» сигналом. Этот сигнал проходит через аналого-цифровой преобразователь (АЦП) и преобразуется в «цифровой» сигнал для отображения на компьютере в виде изображения. Большинство научных камер являются монохромными, а это означает, что цифровой сигнал поступает в виде уровень серого , от чисто черного до чисто белого. Чем интенсивнее аналоговый сигнал, тем белее уровень серого, а это означает, что флуоресцентные изображения обычно отображаются как серо-белый сигнал на темном черном фоне.
Этот сигнал проходит через аналого-цифровой преобразователь (АЦП) и преобразуется в «цифровой» сигнал для отображения на компьютере в виде изображения. Большинство научных камер являются монохромными, а это означает, что цифровой сигнал поступает в виде уровень серого , от чисто черного до чисто белого. Чем интенсивнее аналоговый сигнал, тем белее уровень серого, а это означает, что флуоресцентные изображения обычно отображаются как серо-белый сигнал на темном черном фоне.
Сигнал распределяется по доступному диапазону уровней серого, чем больше уровень сигнала, тем больше уровней серого требуется для полного отображения изображения. Если сигнал имеет пик из 5000 электронов, но камера может отображать только 100 различных уровней серого, сигнал будет сжат, и каждые 50 электронов будут преобразованы в один уровень серого, а это означает, что сигнал должен увеличиться более чем на 50 электронов. до того, как изменение можно было увидеть на изображении. Это сделало бы камеру нечувствительной к небольшим изменениям в образце.
Чтобы получить правильное количество уровней серого для отображения диапазона сигнала, камеры могут работать с разной битной глубиной . Компьютеры хранят информацию в виде «битов», где бит может быть равен 1 или 0. Если бы пиксель камеры был 1 бит, он был бы либо чисто черным, либо чисто белым и не был бы полезен для количественных изображений. Каждый бит может отображать 2 уровня серого x , поэтому 1 бит соответствует 2 (2 1 ) уровням серого, а 2 бита соответствует 4 (2 2 ) уровням серого, как показано на рисунке 9.0014 Таблица 1 .
Поскольку это также визуальная концепция, она визуально описана на Рис. 2 , где показаны доступные уровни серого с разной глубиной цвета от 1 бита до 14 бит.
| Разрядность | Доступные уровни серого | Доступные уровни серого | 1 бит | 2 1 | 2 |
| 2 бит | 2 2 | 4 |
| 3 бита | 2 3 | 8 |
| 4 бита | 2 4 | 16 |
| 6 бит | 2 6 | 64 |
| 8 бит | 2 8 | 256 |
| 10 бит | 2 10 | 1024 |
| 12 бит | 2 12 | 4096 |
| 14 бит | 2 14 | 16 384 |
| 16 бит | 9 0378 2 1665 536 |
 2: Доступные уровни серого от 1 бит до 14 кусочек. Начиная с 2 уровней серого, количество каждый раз удваивается. Изменения очевидны при переходе от 1 бита к 6 битам, но становятся менее четкими на более высоких уровнях. Это связано с ограничениями компьютерных мониторов и человеческого глаза.
2: Доступные уровни серого от 1 бит до 14 кусочек. Начиная с 2 уровней серого, количество каждый раз удваивается. Изменения очевидны при переходе от 1 бита к 6 битам, но становятся менее четкими на более высоких уровнях. Это связано с ограничениями компьютерных мониторов и человеческого глаза.Научные камеры обычно используют битовую глубину 8 бит и выше, поскольку ниже этого уровня обычно недостаточно уровней серого для отображения основных деталей изображения. Это показано Рис.3 , показывающий типичное изображение ячейки при разной битовой глубине.
Как видно на рис. 2 и 3 , ясно видны визуальные различия и улучшения от 1 до 8 бит, но от 8-16 бит гораздо труднее различить визуальную разницу, даже несмотря на количество серых уровни удваиваются с каждым шагом. Это связано с рядом ограничивающих факторов, включая монитор компьютера, который вы используете для просмотра этой статьи, а также глаза, которыми вы смотрите на монитор. Компьютерные мониторы имеют ограничение 8 бит на цветовой канал, обычно красный, зеленый и синий (RGB). Хотя эти мониторы могут отображать более 16 миллионов цветов RGB (256 x 256 x 256), для монохромного просмотра доступны только 256 уровней серого, что означает, что ваши монохромные изображения микроскопа просматриваются на мониторе как 8-битные. Это похоже на человеческий глаз, который может видеть более 10 миллионов цветов, но только около 30-200 оттенков серого. Плохое зрение в сером цвете является причиной того, что мы можем бороться в условиях низкой освещенности, когда цвета приглушены, и в районах с сильным снегопадом.
Компьютерные мониторы имеют ограничение 8 бит на цветовой канал, обычно красный, зеленый и синий (RGB). Хотя эти мониторы могут отображать более 16 миллионов цветов RGB (256 x 256 x 256), для монохромного просмотра доступны только 256 уровней серого, что означает, что ваши монохромные изображения микроскопа просматриваются на мониторе как 8-битные. Это похоже на человеческий глаз, который может видеть более 10 миллионов цветов, но только около 30-200 оттенков серого. Плохое зрение в сером цвете является причиной того, что мы можем бороться в условиях низкой освещенности, когда цвета приглушены, и в районах с сильным снегопадом.
Из-за этих ограничений глаз и мониторов монохромные изображения обычно просматриваются с 8-битной глубиной цвета, даже если изображение было получено с более высокой битовой глубиной. Вот почему количественные научные камеры жизненно важны, поскольку они могут отображать, как сигнал распределяется между уровнями серого в изображении, и могут обнаруживать различия в уровнях серого, которые неразличимы для глаз.
Битовая глубина и масштабирование
Рис. 4: Флуоресцентное изображение с низким уровнем сигнала, показанное в полной 12-битной шкале 4096 и автоматически масштабированное для отображения истинного диапазона сигнала. Этот низкий сигнал занимает лишь очень небольшое количество доступной битовой глубины. Тот же сигнал показан в 8-битном формате, который легко поддерживает этот уровень сигнала. Если вы используете 12- или 16-битную камеру для захвата сигналов ~100 электронов, вы будете постоянно масштабировать гистограмму до самого низа, а это означает, что большинство доступных уровней серого будут потрачены впустую.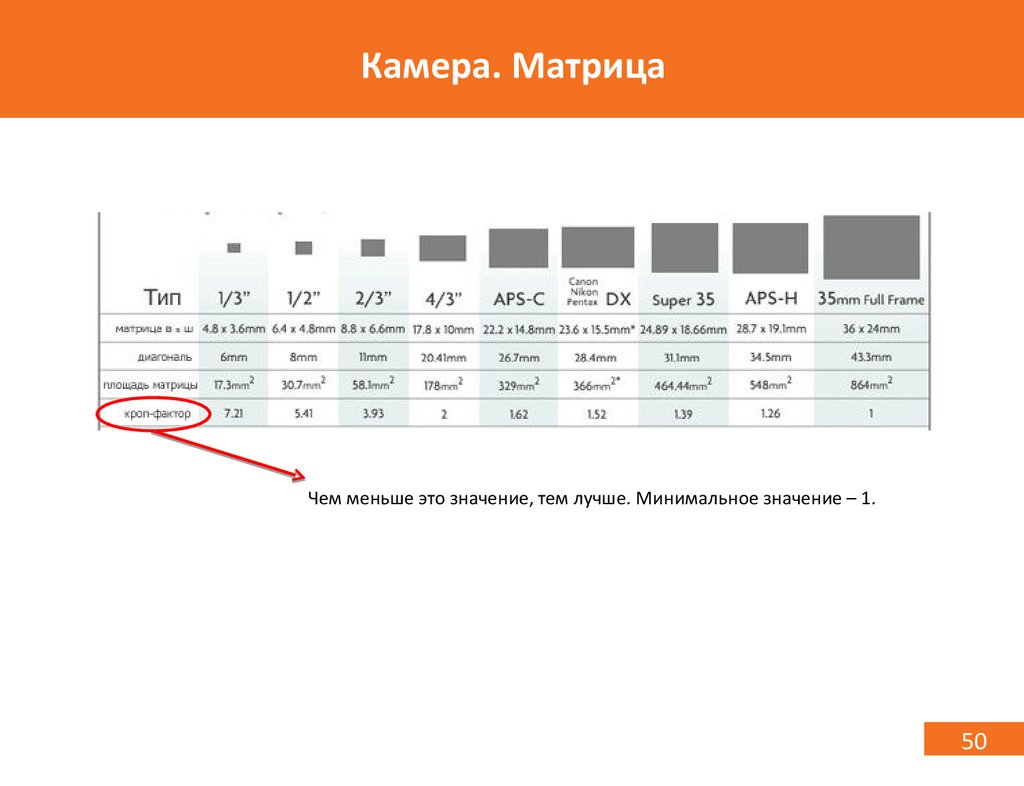 Пример этого можно увидеть в Рис.4 , где образец стандартной флуоресцентной клетки изображен с разрешением 12 бит. Сигнал может быть распределен среди 4096 уровней серого, но занимает лишь небольшую часть этого диапазона (, рис. 4A, ). Только путем масштабирования изображения до этой небольшой части полного доступного диапазона (~ 600 уровней серого из 4096) можно оптимально отобразить сигнал (, рис. 4B, ). Битовая глубина 12 не нужна, так как большая часть уровней серого остается неиспользованной, это подходит для гораздо более высокого уровня сигнала (500-1000 электронов).
Пример этого можно увидеть в Рис.4 , где образец стандартной флуоресцентной клетки изображен с разрешением 12 бит. Сигнал может быть распределен среди 4096 уровней серого, но занимает лишь небольшую часть этого диапазона (, рис. 4A, ). Только путем масштабирования изображения до этой небольшой части полного доступного диапазона (~ 600 уровней серого из 4096) можно оптимально отобразить сигнал (, рис. 4B, ). Битовая глубина 12 не нужна, так как большая часть уровней серого остается неиспользованной, это подходит для гораздо более высокого уровня сигнала (500-1000 электронов).
Тот же самый сигнал также показан в 8 битах ( Рис. 4C ) и только с 256 доступными уровнями серого тот же самый сигнал по-прежнему легко размещается. Это показывает, как сигнал будет выглядеть в 8-битном режиме Kinetix sCMOS, который по-прежнему представляет весь сигнал в виде данных, но работает гораздо более эффективно на более высоких скоростях и с меньшими размерами файлов. Для этого уровня сигнала вам не нужны 12 или 16 бит.
Для этого уровня сигнала вам не нужны 12 или 16 бит.
Историческая битовая глубина
Большинство научных камер работают с разрядностью 8 бит или выше, но разные технологии камер исторически использовали разную битовую глубину. Самая старая технология камеры, ПЗС, использовала 8 бит по-другому. Классические 8-битные ПЗС-матрицы будут полностью масштабироваться для камеры, а не для сигнала, а это означает, что ПЗС-матрицы с полной ячейкой около 10 000 электронов будут распределены только между 256 уровнями серого, что дает вам около 40-50 электронов на уровень серого. Если бы сигнал увеличился на 30 электронов, уровень серого не изменился бы, а это означает, что эти 8-битные ПЗС-матрицы не могли точно представить сигнал от образца. Это затрудняло использование этих ПЗС-матриц для флуоресцентной визуализации или визуализации при слабом освещении, и 12-битные ПЗС-матрицы стали стандартом с 2000 по 2010 год.
После ПЗС появились ПЗС с электронным умножением (EMCCD), которые умножали электронные сигналы до 1000 раз, чтобы увеличить отношение сигнал/шум (SNR) для более чувствительного изображения. Из-за этого уровни сигнала умножения были очень высокими, а это означало, что EMCCD подходили для более высокой разрядности 16 бит, распространяя сигнал по 65 000 уровней серого. EMCCD были хорошо приняты научным сообществом из-за повышенной скорости изображения и чувствительности по сравнению с ПЗС, и какое-то время принятая битовая глубина для научных изображений составляла 16 бит.
Из-за этого уровни сигнала умножения были очень высокими, а это означало, что EMCCD подходили для более высокой разрядности 16 бит, распространяя сигнал по 65 000 уровней серого. EMCCD были хорошо приняты научным сообществом из-за повышенной скорости изображения и чувствительности по сравнению с ПЗС, и какое-то время принятая битовая глубина для научных изображений составляла 16 бит.
Из-за дороговизны, электромагнитного затухания, коэффициента избыточного шума, низких скоростей, небольшого поля зрения и низкого разрешения датчики EMCCD вытесняются датчиками sCMOS в качестве основной технологии обработки изображений на сегодняшний день. Поскольку датчики sCMOS не используют умножение электронов, полученные сигналы не усиливаются и не обязательно нуждаются в полном диапазоне, предлагаемом 16-битным. В результате камеры sCMOS могут предлагать более гибкий диапазон битовой глубины.
Наша серия sCMOS-камер с задней подсветкой Prime позволяет исследователям выбирать между 12-битным и 16-битным форматом, при этом большинство использует 12-битный формат из-за более высокой скорости, а большинству приложений флуоресцентной визуализации не требуется 16-битный диапазон. Наша новейшая камера Kinetix делает еще один шаг вперед и предлагает 8-, 12- и 16-битные режимы. В то время как ранние ПЗС масштабировали 8 бит до лунки, Kinetix масштабирует 8 бит до сигнала, что означает, что он может точно обнаруживать и представлять флуоресцентные сигналы слабого освещения на чрезвычайно высоких скоростях и с половиной размера файла. Наши камеры Prime и Kinetix обеспечивают гибкую визуализацию с битовой глубиной, которую можно адаптировать к уровню сигнала в эксперименте. В этом диапазоне битовой глубины данные обнаруживаются и представляются, но для ваших приложений визуализации жизненно важно, чтобы ваши данные соответствовали глубине. Переход от 16-битного режима к 12- или 8-битному режиму дает много преимуществ.
Наша новейшая камера Kinetix делает еще один шаг вперед и предлагает 8-, 12- и 16-битные режимы. В то время как ранние ПЗС масштабировали 8 бит до лунки, Kinetix масштабирует 8 бит до сигнала, что означает, что он может точно обнаруживать и представлять флуоресцентные сигналы слабого освещения на чрезвычайно высоких скоростях и с половиной размера файла. Наши камеры Prime и Kinetix обеспечивают гибкую визуализацию с битовой глубиной, которую можно адаптировать к уровню сигнала в эксперименте. В этом диапазоне битовой глубины данные обнаруживаются и представляются, но для ваших приложений визуализации жизненно важно, чтобы ваши данные соответствовали глубине. Переход от 16-битного режима к 12- или 8-битному режиму дает много преимуществ.
Факторы, на которые влияет битовая глубина
С камерами sCMOS, предлагающими диапазон битовой глубины для различных приложений, полезно знать, что происходит, когда изменяется битовая глубина, и преимущества для изображения.
Скорость обработки изображения
При более низкой битовой глубине меньше возможных уровней серого для преобразования сигнала, что значительно ускоряет процесс преобразования. С нашими камерами sCMOS 12-битные режимы работают с удвоенной скоростью считывания по сравнению с 16-битными режимами, поэтому 12-битные режимы необходимы, когда требуются высокие скорости. Например, Прайм 9.5B может получить доступ только к полным 80 кадрам в секунду на полном кадре (1,4 мегапикселя) в 12-битном режиме.
С нашими камерами sCMOS 12-битные режимы работают с удвоенной скоростью считывания по сравнению с 16-битными режимами, поэтому 12-битные режимы необходимы, когда требуются высокие скорости. Например, Прайм 9.5B может получить доступ только к полным 80 кадрам в секунду на полном кадре (1,4 мегапикселя) в 12-битном режиме.
Дальнейшее снижение до 8 бит позволяет использовать чрезвычайно высокие скорости для определенных приложений, таких как визуализация кальция/напряжения или при работе с живыми динамическими образцами, когда требуется скорость >1000 кадров в секунду. Kinetix работает со скоростью 500 кадров в секунду на полном кадре (10 мегапикселей) в 8-битном режиме, что позволяет исследователям снимать больше, чем когда-либо прежде. Для высокоскоростных приложений 16-битный режим ограничивает скорость сбора данных, особенно потому, что уровни сигнала, вероятно, будут низкими из-за малого времени экспозиции, необходимого для получения высокоскоростного изображения.
Размер файла
С точки зрения компьютерной памяти, 8 бит составляют 1 байт, при хранении в мегабайтах, гигабайтах, терабайтах и т. д. Это означает, что 8-битные изображения занимают один байт данных, а битовая глубина выше 8 требует более одного байта, при этом 12- и 16-битные изображения масштабируются до двух байтов. Это означает, что изображения, снятые с разрядностью 12 или 16 бит, имеют вдвое больший размер файла по сравнению с изображениями с разрядностью 8 бит. Kinetix может не только получать изображения с чрезвычайно высокой скоростью в 8-битном режиме, но и значительно упрощает хранение и передачу данных.
д. Это означает, что 8-битные изображения занимают один байт данных, а битовая глубина выше 8 требует более одного байта, при этом 12- и 16-битные изображения масштабируются до двух байтов. Это означает, что изображения, снятые с разрядностью 12 или 16 бит, имеют вдвое больший размер файла по сравнению с изображениями с разрядностью 8 бит. Kinetix может не только получать изображения с чрезвычайно высокой скоростью в 8-битном режиме, но и значительно упрощает хранение и передачу данных.
При выполнении высокоскоростных или покадровых съемок на нескольких длинах волн или в координатах XY эксперименты могут накапливать огромное количество изображений. Передача или анализ этих больших наборов данных требует больших вычислительных мощностей и времени, что создает значительные неудобства для исследователя. При снижении до 8 бит изображения будут вдвое меньше размера файла и станут намного более управляемыми. Это упрощает передачу данных, и эта проблема становится все более и более важной по мере увеличения скорости камеры и размера сенсора.
Динамический диапазон
Динамический диапазон научной камеры — это, по сути, способность сенсора одновременно считывать очень яркие и очень темные сигналы. Если камера имеет динамический диапазон 4000 : 1 (отношение самого высокого к самому низкому обнаруживаемому сигналу), она может обнаружить только 4000 уровней сигнала, и использование 16-битного режима с 65 536 уровнями серого будет неэффективным, этот динамический диапазон лучше подходит в 12-битный режим (4096 уровней серого). Более высокая битовая глубина не приводит непосредственно к более высокому динамическому диапазону, более высокая битовая глубина просто более точно нарезает сигнал и не влияет на соотношение между самой высокой и самой низкой яркостью, которую может обнаружить датчик.
Усиление
В то время как битовая глубина определяет количество доступных уровней серого для распределения сигнала, усиление является фактором, определяющим количество электронов на уровень серого. Если усиление равно 1x, увеличение сигнала на 1 электрон приводит к увеличению уровней серого. В камерах sCMOS разная битовая глубина часто имеет доступ к разным состояниям усиления. Это важно для визуализации, поскольку определенные состояния усиления имеют разный шум считывания, что делает выбор битовой глубины и состояния усиления жизненно важным для низких уровней сигнала.
В камерах sCMOS разная битовая глубина часто имеет доступ к разным состояниям усиления. Это важно для визуализации, поскольку определенные состояния усиления имеют разный шум считывания, что делает выбор битовой глубины и состояния усиления жизненно важным для низких уровней сигнала.
Рекомендации по уровню сигнала
Камеры sCMOS предлагают диапазон различной глубины цвета, но важно знать, какой из них лучше всего подходит для вашего приложения. Каждый эксперимент по визуализации уникален и работает с разными образцами, уровнями освещенности и скоростями. Все эти факторы влияют на то, какая битовая глубина подходит для вашего приложения. Основная информация, которую необходимо знать, это уровень сигнала , вот некоторые факторы, которые следует учитывать:
- Светлое поле или флуоресценция? Флуоресцентные сигналы на несколько величин ниже сигналов светлого поля (см. Рис.4 ), а это означает, что большинство экспериментов с флуоресцентной визуализацией имеют более низкий уровень сигнала.
- Ваш образец активен или исправлен? Источники света высокой интенсивности могут вызывать фототоксичность и неблагоприятное воздействие на живые образцы, и существует гораздо меньший диапазон флуоресцентных зондов/маркеров, доступных для живых образцов, по сравнению с фиксированными клетками/тканями. Живые образцы обычно дают более низкие уровни сигнала.
- Вы делаете снимки на высокой скорости? Для достижения высокой частоты кадров требуется малое время экспозиции. Только при выдержке в течение 1 мс или меньше можно достичь скорости 1000 кадров в секунду (1 кГц), это означает, что у камеры очень мало времени для сбора сигнала. Высокоскоростная визуализация обычно приводит к более низким уровням сигнала.
- Конфокальный или широкоугольный? По своей природе конфокальные системы с лазерным сканированием и вращающимся диском используют точечные отверстия для блокирования расфокусированного света и освещения небольших участков образца. освещен.
- Видимый свет, УФ или инфракрасное излучение? Научные камеры обычно наиболее чувствительны к длинам волн в спектре видимого света. Если ваше изображение включает изображение в ультрафиолетовом, ближнем инфракрасном или инфракрасном диапазоне, полученные сигналы будут ниже из-за снижения квантовой эффективности камеры на этих длинах волн.

 освещен.
освещен.Визуализация фиксированных клеток с помощью высокоинтенсивного лазера и системы с широким полем зрения приведет к гораздо более высокому уровню сигнала по сравнению с конфокальной системой с высокоскоростным вращающимся диском, которая визуализирует живые клетки или модельные организмы. Зная свой типичный уровень сигнала в своих экспериментах, вы можете сопоставить его с оптимальной битовой глубиной.
Несмотря на различия в сигнале между флуоресцентными приложениями, этот сигнал по-прежнему на порядок ниже светлопольной визуализации. В то время как флуоресцентные приложения (живые или фиксированные) основаны на обнаружении света, излучаемого образцом (в ответ на свет возбуждения), этот излучаемый сигнал обычно во много раз слабее, чем сигнал возбуждения.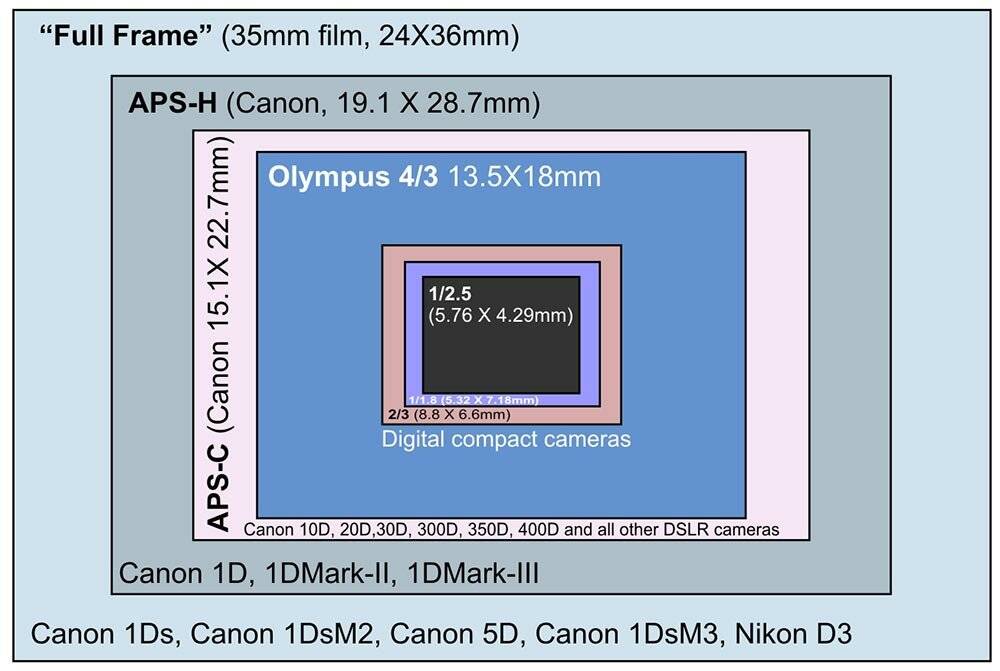 Кроме того, сигнал ограничен отмеченными областями на образце, что означает, что большая часть изображения черная, а образец белый. При использовании светлого поля образцы освещаются непосредственно светом яркой лампы, проходящей через образец, с областями, поглощающими свет. В результате получается изображение, на котором образец темный, а фон белый, а прямое освещение означает, что сигнал во много раз выше.
Кроме того, сигнал ограничен отмеченными областями на образце, что означает, что большая часть изображения черная, а образец белый. При использовании светлого поля образцы освещаются непосредственно светом яркой лампы, проходящей через образец, с областями, поглощающими свет. В результате получается изображение, на котором образец темный, а фон белый, а прямое освещение означает, что сигнал во много раз выше.
Для приложений со светлым полем требуется более высокая битовая глубина (16 бит) из-за интенсивности сигнала. Однако это не относится к флуоресцентным приложениям, которые часто имеют гораздо более низкие уровни сигнала и, как правило, не подходят для более высокой разрядности, такой как 16 бит. Для большинства флуоресцентных изображений оптимальны 12 или 8 бит, что дает дополнительное преимущество в виде увеличения скорости изображения и уменьшения размера файла. Сравнение интенсивности сигнала между флуоресценцией и светлым полем можно увидеть в Рис.5.
Рис.