
Юстировка камеры что это: Что такое юстировка? В чем суть этой манипуляции?
Что такое калибровка фотоаппарата?
Что такое калибровка фотоаппарата?
Geometric camera calibration, также называемый camera resectioning, оценивает параметры линзы и датчика изображения изображения или видеокамеры. Можно использовать эти параметры, чтобы откорректировать для искажения объектива, измерить размер объекта в мировых единицах измерения или определить местоположение камеры в сцене. Эти задачи используются в приложениях, таких как машинное зрение, чтобы обнаружить и измерить объекты. Они также используются в робототехнике для систем навигации и 3-D реконструкции сцены.
Примеры того, что можно сделать после калибровки камеры:
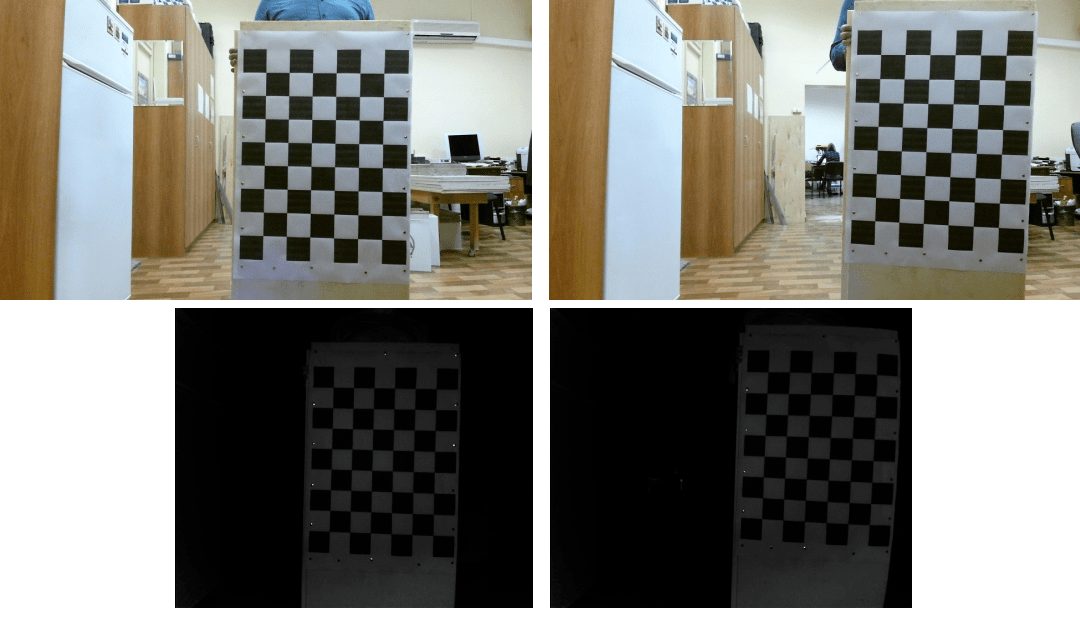
Параметры камеры включают внутренние параметры, значения внешних параметров и коэффициенты искажения. Чтобы оценить параметры камеры, у вас должны быть 3-D мировые точки и их соответствующие 2D точки изображений. Можно получить эти соответствия с помощью повторных изображений калибровочного шаблона, таких как шахматная доска. Используя соответствия, можно решить для параметров камеры. После того, как вы калибруете камеру, чтобы оценить точность предполагаемых параметров, вы можете:
Используя соответствия, можно решить для параметров камеры. После того, как вы калибруете камеру, чтобы оценить точность предполагаемых параметров, вы можете:
Постройте относительные местоположения камеры и калибровочного шаблона
Вычислите ошибки перепроекции.
Вычислите ошибки расчета параметра.
Используйте Camera Calibrator, чтобы выполнить калибровку фотоаппарата и оценить точность предполагаемых параметров.
Модели камеры
Computer Vision Toolbox™ содержит калибровочные алгоритмы для модели камеры с точечной диафрагмой и модели fisheye-камеры. Можно использовать модель подозрительного взгляда с камерами до поля зрения (FOV) 195 градусов.
Калибровочный алгоритм крошечного отверстия основан на модели, предложенной Жан-Ивом Буге [3]. Модель включает, модель [1] камеры с точечной диафрагмой и искажение объектива [2].The модель камеры с точечной диафрагмой не составляет искажение объектива, потому что идеальная камера с точечной диафрагмой не имеет линзы. Чтобы точно представлять действительную камеру, полная модель камеры, используемая алгоритмом, включает радиальное и тангенциальное искажение объектива.
Чтобы точно представлять действительную камеру, полная модель камеры, используемая алгоритмом, включает радиальное и тангенциальное искажение объектива.
Из-за экстремального искажения линза подозрительного взгляда производит, модель крошечного отверстия не может смоделировать fisheye-камеру. Для получения дополнительной информации на калибровке фотоаппарата с помощью модели подозрительного взгляда, смотрите Калибровочные Основы Подозрительного взгляда.
Модель камеры с точечной диафрагмой
Камера с точечной диафрагмой является простой камерой без линзы и с одной маленькой апертурой. Световые лучи проходят через апертуру и проецируют перевернутое изображение на противоположной стороне камеры. Думайте о виртуальной плоскости изображения, как являющейся перед камерой и содержащей вертикальное изображение сцены.
Параметры камеры с точечной диафрагмой представлены в 4 3, матрица вызвала camera matrix. Эта матрица сопоставляет 3-D мировую сцену в плоскость изображения.
Мировые точки преобразовываются к координатам камеры с помощью параметров значений внешних параметров. Координаты камеры сопоставлены в плоскость изображения с помощью параметров внутренних параметров.
Параметры калибровки фотоаппарата
Калибровочный алгоритм вычисляет матрицу камеры использование внешних и внутренних параметров. Внешние параметры представляют твердое преобразование от 3-D системы мировой координаты до системы координат 3-D камеры. Внутренние параметры представляют проективное преобразование от координат 3-D камеры в 2D координаты изображений.
Внешние параметры
Внешние параметры состоят из вращения, R, и перевода, t. Источник системы координат камеры в ее оптическом центре, и ее x- и ось y- задают плоскость изображения.
Внутренние параметры
Внутренние параметры включают фокусное расстояние, оптический центр, также известный как
[fx00sfy0cxcy1]
Пиксельный скос задан как:
| [cxcy] — Оптический центр (основная точка), в пикселях. |
| (fx,fy) — Фокусное расстояние в пикселях. fx=F/px fy=F/py F — Фокусное расстояние в мировых единицах измерения, обычно описанных в миллиметрах. (px,py) — Размер пикселя в мировых единицах измерения. |
| s — Скошенный коэффициент, который является ненулевым, если оси изображений не перпендикулярны. s=fxtanα |
Искажение при закрытых дверях калибровка
Матрица камеры не составляет искажение объектива, потому что идеальная камера с точечной диафрагмой не имеет линзы. Чтобы точно представлять действительную камеру, модель камеры включает радиальное и тангенциальное искажение объектива.
Радиальное искажение
Радиальное искажение происходит, когда световые лучи изгибаются более близкий ребра линзы, чем они делают в ее оптическом центре. Чем меньший линза, тем больше искажение.
Радиальные коэффициенты искажения моделируют этот тип искажения. Искаженные точки обозначаются как (искаженныйx
, искаженныйy):x, искаженный = x (1 + k 1*r2 + k 2*r4 + k 3*r6)
y, искаженный = y (1 + k 1*r2 + k 2*r4 + k 3*r6)
x, y Неискаженные пиксельные местоположения. x и y находятся в нормированных координатах изображений. Нормированные координаты изображений вычисляются от пиксельных координат путем перевода в оптический центр и деления на фокусное расстояние в пикселях.
 Таким образом x и y являются безразмерными.
Таким образом x и y являются безразмерными.k 1, k 2, и k
r2 = x2 + y2
 Таким образом x и y являются безразмерными.
Таким образом x и y являются безразмерными.Как правило, два коэффициента достаточны для калибровки. Для серьезного искажения, такой как в широкоугольных объективах, можно выбрать три коэффициента, чтобы включать k 3.
Тангенциальное искажение
Тангенциальное искажение происходит, когда линза и плоскость изображения не параллельны. Тангенциальные коэффициенты искажения моделируют этот тип искажения.
Искаженные точки обозначаются как (искаженныйx, искаженныйy):
x, искаженный = x + [2 * p 1 * x * y + p 2 * (r2 + 2 * x2)]
y, искаженный = y + [p 1 * (r2 + 2 *y2) + 2 * p 2 * x * y]
x, y Неискаженные пиксельные местоположения.
x и y находятся в нормированных координатах изображений. Нормированные координаты изображений вычисляются от пиксельных координат путем перевода в оптический центр и деления на фокусное расстояние в пикселях. Таким образом x и y являются безразмерными.p 1 и p 2 — Тангенциальные коэффициенты искажения линзы.
r2 = x2 + y2
 x и y находятся в нормированных координатах изображений. Нормированные координаты изображений вычисляются от пиксельных координат путем перевода в оптический центр и деления на фокусное расстояние в пикселях. Таким образом x и y являются безразмерными.
x и y находятся в нормированных координатах изображений. Нормированные координаты изображений вычисляются от пиксельных координат путем перевода в оптический центр и деления на фокусное расстояние в пикселях. Таким образом x и y являются безразмерными.Ссылки
[1] Чжан, Z. “Гибкий Новый техник для Калибровки фотоаппарата”. Транзакции IEEE согласно Анализу Шаблона и Искусственному интеллекту. Издание 22, № 11, 2000, стр 1330–1334.
[2] Heikkila, J. и О. Сильвен. “Процедура калибровки фотоаппарата с четырьмя шагами с неявной коррекцией изображений”.
[3] Bouguet, J. Y. “Тулбокс калибровки фотоаппарата для MATLAB”. Вычислительное видение в Калифорнийском технологическом институте. Тулбокс калибровки фотоаппарата для MATLAB
Вычислительное видение в Калифорнийском технологическом институте. Тулбокс калибровки фотоаппарата для MATLAB
[4] Брадский, G. и А. Кэехлер. Изучение OpenCV: компьютерное зрение с библиотекой OpenCV. Севастополь, CA: О’Райли, 2008.
Смотрите также
Приложения
- Camera Calibrator | Stereo Camera Calibrator
Похожие темы
- Реализуйте визуального SLAM в MATLAB
- Используя одно приложение Camera Calibrator
- Используя приложение Stereo Camera Calibrator
- Оценка точности калибровки одиночной камеры
- Калибровочные основы подозрительного взгляда
- Сконфигурируйте монокулярную fisheye-камеру (Automated Driving Toolbox)
- Калибруйте монокулярную камеру (Automated Driving Toolbox)
- Измерение плоских объектов с калиброванной камерой
- Структура от движения от двух представлений
- Структура от движения от нескольких представлений
Значение информации в диалоговом окне «Калибровка камеры» в Metashape : Helpdesk Portal
Metashape поддерживает четыре основных типа камер: Кадровая, «Рыбий глаз», Сферическая и Цилиндрическая камеры. В данной статье мы рассмотрим результаты калибровки для камеры типа Кадровая.
В данной статье мы рассмотрим результаты калибровки для камеры типа Кадровая.
Статья ниже содержит следующие разделы:
- Параметры калибровки камеры
- Пример «некорректной» калибровки
- График дисторсий
- Вкладка Дисторсии
- Вкладка Профиль
- Вкладка Корреляция
Фотограмметрическая калибровка камеры выполняется для определения её элементов внутреннего ориентирования, в том числе параметров искажений объектива камеры. Параметры калибровки камеры можно ввести вручную, если они были получены предварительно в процессе калибровки.
Параметры калибровки камеры
Для расчета доступны следующие параметры калибровки:
f — фокусное расстояние (измеряется в пикселях).
cx, cy — координаты главной точки снимка, т.е. координаты пересечения оптической оси объектива с плоскостью матрицы камеры (в пикселях).
b1, b2 — коэффициенты аффинитета и неортогональности, или скоса (в пикселях).
k1, k2, k3, k4 — коэффициенты радиальной дисторсии (безразмерные).
p1, p2 — коэффициенты тангенциальной дисторсии (безразмерные).
Первичные параметры калибровки будут вычислены на этапе Выравнивания снимков. По завершении выравнивания снимков рассчитанные параметры калибровки будут отображаться на вкладке «Уточнённая» в диалоговом окне Калибровка камеры.
Пример «некорректной» калибровки:Обратите внимание на рассчитанные значения параметров cx, cy, b1 и b2 в диалоговом окне Калибровка камеры. Если значения параметров слишком велики (сотни или более у cx, cy и десятки или более у b1, b2), целесообразно повторно выровнять набор снимков, зафиксировав эти параметры.
Обычно значения cx и cy составляют около пары десятков пикселей (или меньше), поскольку значения измеряются от центра снимка. А значения b1 и b2 обычно не превышают нескольких единиц.
Если значения составляют сотни или даже тысячи — это говорит о том, что оценка параметров калибровки, скорее всего, некорректна. Иногда это может быть связано с особенностями полетного задания, например, если камера не поворачивалась на 180 градусов на соседних галсах полета. Вы можете попробовать исправить указанные параметры и заново выровнять снимки, отключив опцию «Адаптивное уточнение модели камеры».
График дисторсий
Metashape предоставляет ряд инструментов для анализа результатов калибровки камеры. Чтобы получить доступ к графику дисторсий, выберите соответствующую опцию из контекстного меню группы камер в диалоговом окне Калибровка камеры.
На вкладке
Дисторсии в диалоговом окне График дисторсий отображается расчетный график искажения для выбранной камеры. На вкладке доступны диаграммы «Общая», «Радиальная», «Асимметричная», «Поправки» и «Остаточные ошибки».
На графике дисторсий отображаются значения и направление дисторсий в соответствии с уточненными параметрами калибровки камеры. График представлен в виде дискретных векторов, представляющих значение дисторсии для точки в центре соответствующей ячейки изображения. Параметры дисторсии рассчитывается по формуле для каждой точки снимка (XY) в координатах самого изображения. Формулы, по которым рассчитывается дисторсия снимка в Metashape, можно найти в Руководстве пользователя в приложении C.
- Общая — отображает суммарное рассчитанное значение всех параметров калибровки камеры.
- Радиальная — отображает суммарный вектор для параметров k1, k2, k3, k4.
- Асимметричная — отображает суммарный вектор для коэффициентов b1, b2 и p1, p2.
- Поправки — на этой вкладке будут отображаться рассчитанные параметры, если в настройках оптимизации была включена опция
 Рекомендуется включать функцию Рассчитывать дополнительные поправки (см. диалоговое окно Оптимизировать положения камер ниже) в случаях, когда дисторсия камеры плохо описывается моделью по умолчанию (в Metashape используется модель дисторсии Брауна).
Рекомендуется включать функцию Рассчитывать дополнительные поправки (см. диалоговое окно Оптимизировать положения камер ниже) в случаях, когда дисторсия камеры плохо описывается моделью по умолчанию (в Metashape используется модель дисторсии Брауна).График Остаточных ошибок позволяет оценить, насколько правильно камера описывается прикладной математической моделью. Обратите внимание, что остаточные ошибки усредняются на ячейку изображения, а затем по всем изображениям в группе камер. Под графиком указан масштаб дисторсии/остаточных ошибок.
- График Остаточных ошибок и диаграммы дисторсий имеют разное значение. Изображения в окне График дисторсий (первые 4 диаграммы дисторсий) представляют значения дисторсии и направления согласно уточненным значениям параметров калибровки, тогда как график Остаточных ошибок представляет собой усредненные ошибки репроецирования для связующих точек, обнаруженных на исходных снимках (усредненных в пределах ячейки снимка, а затем для всех камер в калибровочной группе).
 - График Остаточных ошибок (ошибки репроецирования связующих точек) также добавлен в раздел "Калибровка камеры" отчета из проекта, а графиков дисторсий в отчете нет и доступны они только в диалоговом окне Калибровка камеры.
- График Остаточных ошибок (ошибки репроецирования связующих точек) также добавлен в раздел "Калибровка камеры" отчета из проекта, а графиков дисторсий в отчете нет и доступны они только в диалоговом окне Калибровка камеры. На вкладке
Профиль представлены два графика радиальной и тангенциальной дисторсий, а также то, как их значения в пикселях увеличиваются с увеличением расстояния от центра снимка. Профили можно сохранять в формате изображения. На вкладке
Корреляция представлены:- Столбец «Значение» содержит рассчитанные значения элементов внутреннего ориентирования камеры. Те же значения представлены на вкладке Уточненная диалогового окна Калибровка камеры.
- В столбце «Ошибка» представлено стандартное отклонение для соответствующих значений.
- Значения корреляции для элементов внутреннего ориентирования камеры отражают степень корреляции между соответствующими элементами.

Metashape рассчитает ковариационную матрицу для результатов выравнивания снимков. Диагональными элементами ковариационной матрицы являются дисперсия, σii2; положительный квадратный корень дисперсии, σ, называется стандартным отклонением.
Недиагональными элементами матрицы являются ковариации, σij. Величина каждой ковариации отражает степень корреляции между соответствующими параметрами.
К сожалению, мы не смогли помочь вам в разрешении проблемы. Ваш отзыв позволит нам улучшить эту статью.
Простая настройка PTZ камер в Xeoma — Felenasoft
← Назад к статьям
Поворотная камера PTZ (pan–tilt–zoom) это камера, которая способна двигаться в разные стороны и приближать (а также отдалять) изображение. PTZ камеры чаще всего используются в системах видеонаблюдения, благодаря их возможности двигаться и с легкостью захватывать каждый уголок на территории объекта.
PTZ камеры чаще всего используются в системах видеонаблюдения, благодаря их возможности двигаться и с легкостью захватывать каждый уголок на территории объекта.
PTZ — это аббревиатура от слов «панорамирование», «наклон», и «зум» (pan, tilt, zoom), которая описывает возможности управления камерой. Кроме того, существуют различные варианты PTZ управления, такие как ePTZ (enhanced PTZ) — это функция, которая дополнительно дает возможность фиксировать камеру на определённой части изображения и при этом не двигаться, а также виртуальная технология PTZ (VPTZ), позволяющая использовать камеру с высоким разрешением и с помощью цифрового зума и панорамирования приближать определенные части изображения, без необходимости двигать саму камеру.
На рынке представлено множество PTZ ip камер, которые подойдут под любой бюджет. Xeoma поддерживает 99% всех камер, поэтому вы всегда сможете найти идеальный вариант, соответствующий вашим требованиям, и использовать его в Xeoma.
Добавление и настройка PTZ камер в Xeoma
Камеры в Xeoma можно добавить через меню ‘+’. Вы можете использовать любой метод, обозначенный там. Например, камеру можно добавить с помощью ‘Простого поиска локальных камер’, тогда Xeoma просканирует вашу локальную сеть и найдет все доступные камеры. Или можно использовать ‘Поиск по ip/паролю’ — указать ip адрес камеры, логин/пароль(если доступны) и порт (поле порта также можно оставить пустым, тогда Xeoma просканирует все порты). Еще камеру можно добавить вручную через меню ‘+’ — Добавить новую камеру вручную — указать URL (адрес потока) для просмотра и на запись в архив. Обычно адрес потока можно найти в документации камеры, админ странице в браузере или Интернете.
Вы можете использовать любой метод, обозначенный там. Например, камеру можно добавить с помощью ‘Простого поиска локальных камер’, тогда Xeoma просканирует вашу локальную сеть и найдет все доступные камеры. Или можно использовать ‘Поиск по ip/паролю’ — указать ip адрес камеры, логин/пароль(если доступны) и порт (поле порта также можно оставить пустым, тогда Xeoma просканирует все порты). Еще камеру можно добавить вручную через меню ‘+’ — Добавить новую камеру вручную — указать URL (адрес потока) для просмотра и на запись в архив. Обычно адрес потока можно найти в документации камеры, админ странице в браузере или Интернете.
— Простой поиск локальных камер
— Поиск по ip/паролю
— Добавить новую камеру вручную
Если у вас есть PTZ ip камера в локальной сети, то Xeoma найдет ее автоматически через простой поиск локальных камер. Если вы добавляете PTZ камеру через ‘+’ — Поиск по ip/паролю, вы можете указать ONVIF порт (если ваша камера поддерживает PTZ через ONVIF). PTZ порт можно посмотреть в админ странице камеры в браузере (http://IP_АДРЕС_КАМЕРЫ:ПОРТ).
PTZ порт можно посмотреть в админ странице камеры в браузере (http://IP_АДРЕС_КАМЕРЫ:ПОРТ).
После того, как Xeoma найдет вашу PTZ камеру, в режимах Xeoma Pro, Xeoma Standard, Xeoma Lite и Пробном режиме вы можете начать использовать PTZ, нажав на PTZ иконки в режиме просмотра одной камеры (нажмите на изображение нужной камеры, чтобы перейти в него) в правом верхнем углу или на нижней панели.
При нажатии на PTZ иконку, вы увидите меню управления PTZ для контроля камеры и настройки дополнительных параметров.
В меню PTZ можно задать пресеты (1), а также настроить PTZ туры (2).
Также в меню доступен зум (3) — увеличение и уменьшение картинки, используя собственный зум камеры, и иконки изменения фокуса камеры (4).
Кроме того, можно использовать иконку дополнительных параметров (5), которая покажет все доступные дополнительные возможности, которые камера предоставляет по ONVIF (например, управление ИК-подсветкой или дворником камеры и т. п.).
п.).
С помощью этих инструментов вы сможете поворачивать камеру влево-вправо, вверх-вниз, приближать/отдалять изображение, менять фокус, задавать туры и пресеты, управлять встроенными инструментами камеры и многое другое.
Ручное PTZ управление станет отличным помощником для наблюдения за территорией. В дополнение, вы можете использовать автоматическое слежение за территорией с помощью модуля «PTZ Слежение».
| Внимание! Работа с PTZ пресетами и PTZ обходами (1 и 2), а также с дополнительными параметрами (4 и 5) поддерживается в Xeoma только для камер с поддержкой ONVIF. Для работы с пресетами и турами (1 и 2) необходима действующая лицензия Xeoma Pro как минимум на 1 камеру. Дополнительные параметры (4 и 5) доступны в Xeoma Lite, Xeoma Standard и/или Xeoma Pro. |
Нажав на модуль ‘Универсальная камера’ в цепочке модулей, вы сможете перейти в настройки данного модуля. В настройках модуля ‘Универсальная камеры’ вы найдете различные параметры для настройки PTZ:
В настройках модуля ‘Универсальная камеры’ вы найдете различные параметры для настройки PTZ:
— Вы можете изменить PTZ порт (наиболее удачный вариант — это использовать ONVIF PTZ порт, если доступен)
— Вы можете выбрать различные варианты использования PTZ («Использовать PTZ управление»)
— Вы можете установить инверсию PTZ
— Вы можете нажать ‘Протестировать PTZ’, чтобы протестировать настройки и убедиться, что PTZ работает без проблем
Данные параметры помогут настроить PTZ на вашей камере, если данная возможность не была найдена автоматически или была найдена неправильно.
Также в Xeoma доступна интеграция с PTZ джойстиками (USB). PTZ джойстики помогают не только вести мониторинг за зоной обзора, но и быстро реагировать, если где-то сработал триггер, например, детектор движения.
И еще больше возможностей с помощью дополнительного модуля в Xeoma: Переход на PTZ пресет. Это профессиональная функция, которая поможет вам лучше реагировать на события, происходящие в разных частях изображения с поворотной камеры. Пока камера движется в соответствии с преднастроенным “туром” и совершает “остановки” в определенных областях поля зрения камеры, Xeoma сможет выполнять разную видеоаналитику в каждой области.
Пока камера движется в соответствии с преднастроенным “туром” и совершает “остановки” в определенных областях поля зрения камеры, Xeoma сможет выполнять разную видеоаналитику в каждой области.
Проблемы с добавлением PTZ камер в Xeoma?
Решение проблем с PTZ в Xeoma: PTZ управление не работает
Если камера поддерживает PTZ и контрол управления этими функциями появляется, но нажатие на стрелки или +/- не приносит результата, откройте настройки модуля «Универсальная камера» этой камеры и спуститесь до секции настройки PTZ. Попробуйте другие опции из ячейки «Доступные PTZ». Если используется нестандартный порт для PTZ, укажите его в предоставленной для этого ячейке. Если это не помогает, попробуйте использовать другой URL для получения изображения с камеры (раздел Поток для просмотра) или обратитесь за помощью в нашу техподдержку.
Решение проблем с PTZ в Xeoma: PTZ контрол не показывается
Если Xeoma не нашла PTZ управление для вашей камеры, Вы можете проверить следующее:
- Проверьте, что PTZ работает в админ странице камеры в браузере
- Проверьте нашлось ли PTZ управление в настройках модуля «Универсальная камера»
- Убедитесь, что для камеры в настройках модуля «Универсальная камера» указаны верные данные авторизации.
- Убедиться, что указан верный порт PTZ камеры. Уточните PTZ порт в админке камеры в браузере и используйте его в Xeoma (в настройках модуля «Универсальная камеры»). Чтобы Xeoma обновила порт, сначала введите неправильный и сохраните, а потом снова введите уже правильный.
- Включите ONVIF на вашей камере, если данная возможность доступна (в админ странице в браузере)
- Попробуйте выбрать другой URL на просмотр в настройках модуля ‘Универсальная камера’
- Попробуйте провести «Простой поиск локальных камер» через меню ‘+’ снова (можно передобавить камеру с тем же URL), иногда это помогает
- Убедитесь, что вы зашли в Xeoma под пользователем, у которого есть разрешение на использование PTZ (Главное меню — Удаленный доступ — Пользователи). Попробуйте вместо этого зайти под Администратором
Если камера поддерживает стандартные PTZ протоколы, то всё должно работать без проблем.
Однако, для некоторых камер требуется выполнить дополнительные действия. К примеру, для камеры Hikvision DS-2DE3304W-DE нужно включить “Hikvision-CGI” и установить авторизацию на “digest/basic”. Также может потребоваться включить ONVIF и создать ONVIF пользователя с логином/паролем от вашей камеры в админ странице камеры в браузере.
Но зачастую необходимо подождать лишь несколько минут, и Xeoma найдет PTZ для вашей камеры.
Кроме того, рекомендуем убедиться, что при использовании утилиты кастомизации не было запрещено PTZ управление. В таком случае PTZ меню тоже может не находиться в кастомизированной версии Xeoma (для установки проблемы вы можете посмотреть в файлы ребрендинга в утилите кастомизации).
Решение проблем с PTZ в Xeoma: PTZ контрол был, но пропал
Попробуйте следующее:
1) заходим в настройки модуля «Универсальная камера»
2) запоминаем или записываем содержимое поля «HTTP порт для управления PTZ функциями»
3) указываем здесь любой другой порт и жмём ОК внизу
4) повторяем шаг 1
5) вновь указываем изначальный порт в том же поле
6) ждём минут 5
Доступ к PTZ должен восстановиться при условии, что на стороне камеры ничего не поменялось.
Если проблемы с PTZ на вашей камере решить не удалось, пожалуйста, свяжитесь с нами – мы с радостью поможем!
Мини-FAQ по PTZ:
Как управлять PTZ в iOS-клиенте?
Как настроить PTZ слежение в Xeoma?
5 ноября 2020 Обновлено: 4 апреля 2022
Читайте также:
Дополнительные модули в Xeoma: Искусственный интеллект в действии
PTZ слежение в системе Xeoma
Настройка PTZ туров и патрулирования в Xeoma
PTZ джойстики в Xeoma
Дополнительнвй модуль в Xeoma: Переход на PTZ пресет
Юстировка волокон по сердцевине ОВ, метод PAS. Преимущества и недостатки.
- Методы сведения (юстировки) оптических волокон в сварочных аппаратах для оптоволокна
Метод сведения по сердцевине оптического волокна PAS – это наиболее распространенный метод юстировки, используемый в большинстве сварочных аппаратов Fujikura, Sumitomo, Greenlee, Fitel, ILSINTECH, Inno Instrument и др. Сварочные аппараты с такой системой юстировки изначально сводят оптические волокна по V-образной канавке (как и сварочные аппараты с выравниванием по оболочке), но в случае выявления несоосности сердцевин, они также имеют возможность дополнительной регулировки положения волокна.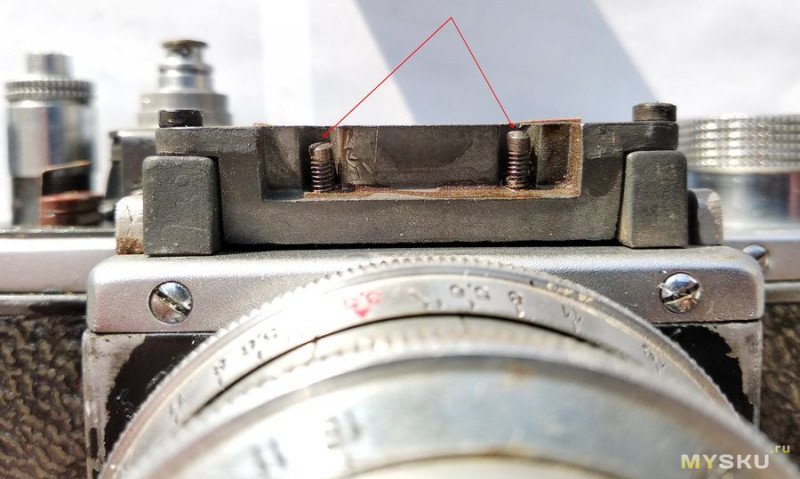 Для этого в сварочных аппаратах используются специальные моторы. Суть метода заключается в том, что оптическое волокно просвечивается пучком света, перпендикулярно расположению оптических волокон. В связи с тем, что характеристики сердцевины ОВ и его оболочки отличаются, свет прошедший через них отклоняется от первоначальной оси под разными углами. Это фиксируют 2 камеры, при помощи специального программного обеспечения определяют положение сердцевин свариваемых волокон и сводят их.
Для этого в сварочных аппаратах используются специальные моторы. Суть метода заключается в том, что оптическое волокно просвечивается пучком света, перпендикулярно расположению оптических волокон. В связи с тем, что характеристики сердцевины ОВ и его оболочки отличаются, свет прошедший через них отклоняется от первоначальной оси под разными углами. Это фиксируют 2 камеры, при помощи специального программного обеспечения определяют положение сердцевин свариваемых волокон и сводят их.
Таким образом минимизируются потери, обусловленные смещением сердцевин ОВ относительно центра. Аппараты с такой системой юстировки также менее чувствительны к загрязнению V-образных канавок. Типичные потери на сварном соединении в таких сварочных аппаратах находятся в пределах 0,01 – 0,05 дБ в зависимости от типа свариваемого волокна. Это вполне удовлетворяет требованиям по построению не только городских линий (сети доступа), но и магистральных ВОЛС и обуславливает наибольшую популярность сварочных аппаратов с PAS системой выравнивания волокон.
К сожалению, более сложная система построения таких сварочных аппаратов приводит к большей стоимости последних. Вместе с тем, наблюдается тенденция снижения цены и на эти аппараты. Вероятно это вызвано насыщением рынка и большой конкуренции. Поэтому зачастую можно выбрать устройство с хорошими характеристиками и по доступной цене.
Сварочные аппараты с юстировкой по сердцевине имеют 6 моторов, которые позволяют двигать волокна: по направлению друг к другу, в вертикальной и горизонтальной плоскости. Это позволяет с высокой точностью свести сердцевины оптических волокон даже при наличии загрязнений в V-канавке.
Таблица 1 — Сравнительная таблица сварочных аппаратов с юстировкой по сердцевине (метод PAS): Fujikura FSM-80S, Ilsintech K11, Greenlee 910FS, Sumitomo TYPE 71-C, INNO View 7, ILSINTECH K7
| Наименование параметра | Fujikura FSM-80S | Fujikura FSM-80S+ |
Ilsintech K11 |
Greenlee 910FS |
ILSINTECH K7 |
INNO View 7 |
Sumitomo TYPE 71-C |
| Сварка оптических волокон | |||||||
| Способ выравнивания волокон | по сердцевине | ||||||
| Тип свариваемых волокон | SMF (G. 652/657), MMF (G.651), DSF (G.653), NZDSF (G.655) 652/657), MMF (G.651), DSF (G.653), NZDSF (G.655) |
то же, + PSCF (G654) | |||||
| Автоматическое распознавание волокон | да | да |
да |
да | да | да | да |
| Количество одновременно свариваемых волокон | 1 пара | 1 пара | 1 пара | 1 пара | 1 пара | 1 пара | 1 пара |
| Калибровка дуги | автоматическая, ручная | автоматическая, ручная |
автоматическая, ручная |
автоматическая, ручная | автоматическая, ручная | автоматическая, ручная | |
| Диаметр оболочки свариваемых волокон | 80 ~ 150 мкм | 80 ~ 150 мкм | 80 ~ 150 мкм | 80 — 150 мкм | 80 — 150 мкм | 80 — 150 мкм | 80 — 150 мкм |
| Диаметр буфферного покрытия свариваемых волокон | 100 — 1000 мкм | 100 — 3000 мкм | 100 мкм ~ 4 мм | 100 ~ 1000 мкм | 125 ~ 3 мм | 100 ~ 1000 мкм | |
| Количество программ сварки | 100 | 100 | 300 | 300 | 128 | 300 | |
| Потери на сварном соединении | SMF: 0. 02dB, MMF: 0.01dB, DSF: 0.04dB, NZDSF: 0.04dB 02dB, MMF: 0.01dB, DSF: 0.04dB, NZDSF: 0.04dB |
||||||
| Отражение от сварного соединения | -60dB | -60dB | -60dB | -60dB | -60dB | -60dB | -60dB |
| Типичное время сварки | 7 сек | 6 сек (Быстрый режим) | 6 сек (Быстрый режим) | 9 сек | 6 сек (Быстрый режим) | 7 сек (Быстрый режим) | |
| Определение ориентировочных потерь на соединении | доступно, по изображению с двух камер (по сердцевине, угловое смещение, деформирование волокна) | ||||||
| Функция внесения потерь на сварном соединении | Есть (диапазон 0 – 10 дБ, шаг 0.1 дБ) | Есть (диапазон 0,1 – 15 дБ, шаг 0.1 дБ) | Есть (диапазон 0 – 10 дБ, шаг 0.01 дБ) | Есть (диапазон 0 – 15 дБ, шаг 0. 1 дБ) 1 дБ) |
|||
| Пямять результатов сварок | 2000 | 20 000 |
20 000 результатов и фото |
5000 | 10 000 результатов и фото | 2 000 | 10 000 результатов + 64 фото |
| Ресурс электродов, сварных соединений | 3 000 | 5 000 | 18 000 | более 3 500 | 3 500 | 3 000 | |
| Тест на разрыв | от 1,96 до 2,25N | от 1,96 до 2,25N | от 1,96 до 2,25N | 200 гр. | от 1,96 до 2,25N | 1.96 ~ 2.25N | 200г |
| Термоусадка | |||||||
| Количество программ термоусадки | 30 | 30 | 100 | 60 | 100 | 32 | 100 |
| Количество посадочных мест для КДЗС | 1 | 1 | 1 | 1 | 2 | 1 | 2 |
| Типичное время термоусадки | 14 сек (kdzs-60) |
|
|
30 сек |
9 сек (kdzs-45) 13 сек (kdzs-60) |
13 сек (kdzs-60) | 28 сек (kdzs-60) |
| Допустимый размер используемой КДЗС | 40 мм, 60 мм (волокно), 32 мм или 28 мм (Коннектор), 20 мм, микро60, 40 мм, микро КДЗС | ||||||
| Длина зачищенного волокна после скола (250 мкм) | 5-16 мм | 5-16 мм | 5-20 мм | 10 мм | 5-16 мм | 8-16 мм | 5-16 мм |
| Отображение результатов | |||||||
| Монитор | сенсорный цветной, 4,73” | сенсорный цветной, 5,0” | Цветной LCD, 5,7’ | сенсорный цветной, 4,3” | сенсорный цветной, 5,0” | 4. 1» сенсорный экран, цветной ЖК дисплей 1» сенсорный экран, цветной ЖК дисплей |
|
| Камеры | 2 камеры типа CMOS | 2 камеры типа CMOS | 2 камеры типа CMOS | 2 камеры типа CMOS | |||
| Увеличение места сварки | просмотр оси X/Y : 200X, MAX : 320X | просмотр оси X/Y : 200X, MAX : 400X | просмотр оси X/Y : 240X | просмотр оси X или Y : 220X, MAX : 700X | MAX : 520X | просмотр оси X или Y : 320X, MAX : 700X | |
| Автоматический поворот экрана | да | да | да | да | да | да | да |
| Питание | |||||||
| Питание от сети | 100~240V AC | 100~240V AC | Адаптер 100~240V AC | Адаптер 100~240V AC | Адаптер 100~240V AC | Адаптер 100~240V AC | 100~240В AC, 50/60Гц |
| Аккумуляторная батарея | Литий ионная DC 16. 8В, 4000 мАч 8В, 4000 мАч |
Литий ионная DC 14,8 В, 4000 мАч | Литий-Полимерная DC 14.8В, 4700 мАч (опция – 6000 мАч) | li-ion (6600 мАч) | Литий-Полимерная (DC 14.8В, 6000 мАч) | 9,800 мАч | Li-ion, 11.1В, 4600мА |
| Дополнительное питание | 12 В | 12 В | автомобильный прикуриватель (12В) – опция | автомобильный прикуриватель (12В) – опция | 9 — 14 В | ||
| Количество циклов сварка/термоусадка от заряда батареи | 200 циклов | 200 циклов | 250 циклов | 120 циклов | 300 циклов | 355 циклов | |
| Общие параметры | |||||||
| Порты | USB 2.0, 6-pin Mini-DIN коннектор | USB 2.0, 6-pin Mini-DIN коннектор | miniUSB, разьем для питания от автомобильного прикуривателя 12В | USB, RS-232 | USB, RCA | USB 2. 0 MINI USB HDMI 0 MINI USB HDMI |
порт USB 2.0 mini, Power output 12V DC |
| Условия эксплуатации | Высота от 0 до 5000 м над уровнем моря; температура от -10 до +50˚C; влажность от 0 до 95% без конденсации, скорость ветра от 0 до 15 м/с | Высота от 0 до 5000 м над уровнем моря; температура от -10 до +50˚C; влажность от 0 до 95% без конденсации, скорость ветра от 0 до 15 м/с | Высота от 0 до 5000 м над уровнем моря; температура от -10 до +50˚C; влажность от 0 до 95% без конденсации, скорость ветра от 0 до 15 м/с | Высота над уровнем моря: 0~5 000 м, Температура: -10℃~50℃, Влажность: 0~95% | Высота над уровнем моря: 0~5 000 м, Температура: -40℃~80℃, Влажность: 0~95% | -10°C до 50°C, < 85% влажности, высота до 6000м., ветер до 15м/c | |
| Условия хранения | Температура от -40 до +80˚C; влажность от 0 до 95% без конденсации.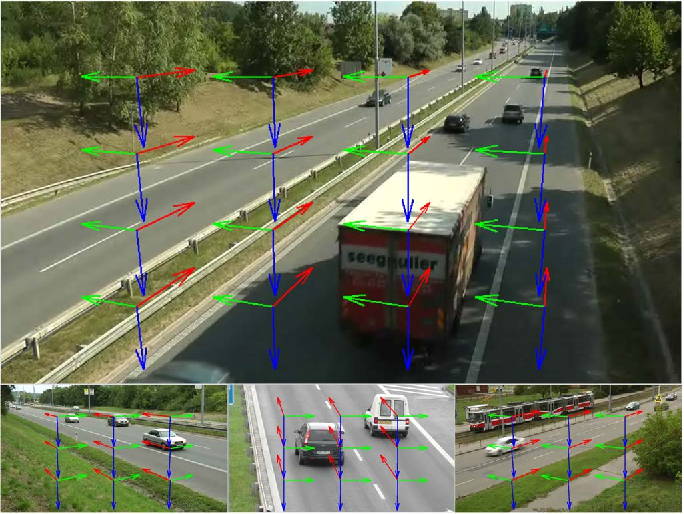 Температура длительного хранения с батареей от -20 до +30˚С Температура длительного хранения с батареей от -20 до +30˚С |
Температура от -40 до +80˚C; влажность от 0 до 95% без конденсации. Температура длительного хранения с батареей от -20 до +30˚С | Температура от -20 до +70˚C; влажность от 0 до 95% без конденсации. | Температура: -40℃~80℃, Влажность: 0~95% | -40°C до 80°C, < 85% влажности | ||
| Габариты сварочного аппарата | 146 x 159 x 150 мм | 146 x 159 x 150 мм | 143 x163 x140 мм | 180 x 160 x155 мм | 142x163x146 мм | 133 x 155 x 160 мм | 120 × 154 × 130 мм |
| Вес сварочного аппарата с батареей | 2.7 кг | 2.7 кг | 2.25 кг | 3,14 кг | 2.5 кг | 2.80 | 2.1 кг |
СМОТРИТЕ ТАКЖЕ:
- Юстировка по оболочке (по V-образной канавке)
- Юстировка по сердцевине оптического волокна (метод CDS)
- Юстировка по уровню оптической мощности проходящего сигнала (LID)
Подписаться на рассылку статей
Windows камеры, микрофона и конфиденциальности
В Windows, наличие камеры и микрофона в составе устройства позволяет Teams видеозвонков, делать снимки, записывать видео и делать другие. Многие приложения и службы требуют наличия камеры или микрофона и используют ее, а параметры Windows позволяют управлять списком приложений, которые могут использовать камеру или микрофон.
Многие приложения и службы требуют наличия камеры или микрофона и используют ее, а параметры Windows позволяют управлять списком приложений, которые могут использовать камеру или микрофон.
Некоторые пользователи опасаются, что незнакомые приложения, компании или вредоносные программы могут использовать камеру или микрофон их устройств. Использование камеры или микрофона должны контролировать вы. Чтобы помочь вам понять, когда камера включена, предоставляются следующие индикаторы.
-
Если устройство оснащено камерой с подсветкой, то во время использования камеры загорается подсветка.
-
Если устройство не оснащено подсветкой камеры, то при включении или отключении камеры отображается соответствующее уведомление.
Чтобы помочь вам понять, когда микрофон используется, предоставляются следующие индикаторы.
Чтобы узнать, какие приложения в настоящее время используют камеру или микрофон либо недавно получили доступ к камере или микрофону
Примечание: Эта функция не существует в Windows 10 версии 1809 и более ранних версиях.
Мы также предоставляем параметры для обеспечения контроля, как описано в следующих разделах.
Элементы управления параметрами камеры или микрофона могут быть уже отключены, если вы используете устройство, выданное вам на работе, или если вы добавили рабочую учетную запись в собственное устройство. В этом случае в верхней части страницы параметров камеры или микрофона появится заголовок Некоторые параметры управляются организацией.
Три типа камер
В зависимости от того, какими камерами оснащено устройство, существует три типа камер, к которым могут получить доступ приложения и службы.
-
Инфракрасная камера позволяет снимать фото и видео в оттенках серого (черно-белые фотографии и видео) на основе интенсивности инфракрасного излучения.
-
Камера глубины распознает контуры объектов перед ней и расстояние от них до устройства. Например, камеру глубины можно использовать для определения того, когда человек находится перед устройством.
 org/ListItem»>
org/ListItem»>
Цветная камера используется для съемки стандартных цветных фотографий и видео.
Управление списком приложений, имеющих доступ к камере
 org/ItemList»>
org/ItemList»>Выполните одно из следующих действий.
В Windows 10, убедитесь, что доступ камеры для этого устройства ,Разрешить приложениям получать доступ к камере иотдельный Microsoft Store приложение, которое вы хотите использовать, включен. Если в списке нет нужного приложения или веб-сайта, скорее всего, это настольное приложение. Для классических приложений нельзя использовать отдельные переглушки, но доступ к ним можно контролировать с помощью разрешить классическим приложениям доступ к камере.
В Windows 11 включите доступ к камере ,разрешите приложениям доступ к камере ивключите отдельный Microsoft Store для приложения, которое вы хотите использовать. Если в списке нет нужного приложения или веб-сайта, скорее всего, это настольное приложение. Классические приложения нельзя по отдельности переглушить, но доступ к ним можно контролировать, разрешив классическим приложениям доступ к камере.
Если в списке нет нужного приложения или веб-сайта, скорее всего, это настольное приложение. Классические приложения нельзя по отдельности переглушить, но доступ к ним можно контролировать, разрешив классическим приложениям доступ к камере.
Дополнительные сведения об управлении доступом камеры на устройстве см. в этой Windows.
Управление списком приложений, имеющих доступ к микрофону
-
Выполните одно из следующих действий.
-
В Windows 10, убедитесь, что доступ микрофона для этого устройства ,Разрешить приложениям получать доступ к микрофону иотдельный Microsoft Store приложение, которое вы хотите использовать, включен.
Если в списке нет нужного приложения или веб-сайта, скорее всего, это настольное приложение. Приложения для настольных компьютеров нельзя по отдельности переключять, но доступ к ним можно контролировать с помощью разрешить классическим приложениям доступ к микрофону. -
В Windows 11 включите микрофон ,разрешите приложениям доступ к микрофону ивключите отдельный Microsoft Store для приложения, которое вы хотите использовать. Если в списке нет нужного приложения или веб-сайта, скорее всего, это настольное приложение. Классические приложения нельзя по отдельности переключять, но доступ к ним можно контролировать с помощью приложения «Позволить классическим приложениям получать доступ к микрофону».
 Если в списке нет нужного приложения или веб-сайта, скорее всего, это настольное приложение. Приложения для настольных компьютеров нельзя по отдельности переключять, но доступ к ним можно контролировать с помощью разрешить классическим приложениям доступ к микрофону.
Если в списке нет нужного приложения или веб-сайта, скорее всего, это настольное приложение. Приложения для настольных компьютеров нельзя по отдельности переключять, но доступ к ним можно контролировать с помощью разрешить классическим приложениям доступ к микрофону.Как разрешить веб-сайту использовать камеру или микрофон при просмотре веб-страниц в Microsoft Edge?
При просмотре веб-сайтов в Microsoft Edge можно использовать камеру и микрофон. Однако, даже когда камера и микрофон включены для Microsoft Edge, будет необходимо по-прежнему предоставлять разрешение отдельным веб-сайтам на использование камеры и микрофона. Вот как это сделать.
Однако, даже когда камера и микрофон включены для Microsoft Edge, будет необходимо по-прежнему предоставлять разрешение отдельным веб-сайтам на использование камеры и микрофона. Вот как это сделать.
-
Перейдите на веб-сайт, который хочет использовать микрофон и (или) камеру.
-
Если появится диалоговое окно с вопросом, хотите ли вы предоставить веб-сайту разрешение на использование камеры или микрофона, выберите Разрешить. Чтобы заблокировать доступ, выберите Заблокироватьили закрыть диалоговое окно.
Как запретить веб-сайту использовать камеру или микрофон при просмотре веб-страниц в Microsoft Edge?
 org/ItemList»>
org/ItemList»>В Microsoft Edge выберите Параметры и другие, а затем выберите Параметры .
В левой части выберите Файлы cookie и Разрешения для сайта, а затем в области Разрешения длясайта выберите Камера или Микрофон.
Выберите значок корзины, чтобы удалить доступ к этому веб-сайту.
Примечание: Некоторые веб-сайты могут не работать, если вы заблокируете для них доступ к камере и микрофону. Например, у вас может не получиться присоединяться к видеоконференции.
Исключения для параметров конфиденциальности камеры и микрофона
Если вы включите Windows Hello, ваша камера будет использовать для вас вход, даже если параметр, позволяющий приложениям получать доступ к камере, отключен. Если функция Windows Hello отключена, у нее нет доступа к камере. (Windows Hello, в Windows 10 и более поздних Windows 10, — это новый способ войти в свои устройства, приложения, веб-службы и сети.)
Если функция Windows Hello отключена, у нее нет доступа к камере. (Windows Hello, в Windows 10 и более поздних Windows 10, — это новый способ войти в свои устройства, приложения, веб-службы и сети.)
Начиная с Windows 10 версии 1903 на страницах параметров камеры и микрофона можно получить доступ к дополнительным параметрам, предоставляющим ограниченный контроль над классическими приложениями, которые обращаются к камере и микрофону с помощью поддерживаемых методов. Этот параметр называется Разрешить классическим приложениям доступ к камере или Разрешить классическим приложениям доступ к микрофону в Windows 10 и Разрешить классическим приложениям получать доступ к камере или Разрешить классическим приложениям получать доступ к микрофону Windows 11. Здесь вы найдете список классических приложений, обнаруженных Windows, которые взаимодействовали с камерой или микрофоном. При включении или отключении параметра будут затронуты все приложения, указанные в этом разделе.
Примечания:
-
Вы можете выбрать любое из приложений, чтобы получить подробные сведения о конкретном файле на устройстве, который обращался к камере или микрофону.
-
Если вы используете приложение или Windows с камерой или микрофоном косвенно через компонент Windows, вы увидите компонент Windows в списке. Например, при взаимодействии с Кортана с помощью микрофона вы увидите «Исполняемый речевой запуск».
-
Если вы отключите параметр Разрешить классическим приложениям доступ к камере или Разрешить классическим приложениям доступ к настройкам микрофона в Windows 10 или Разрешить классическим приложениям доступ к камере или Разрешить классическим приложениям доступ к настройкам микрофона в Windows 11, вы можете повлиять на некоторые функции Windows с помощью камеры или микрофона, например Кортана или Windows диктовку.

Классические приложения могут не всегда отображаться в списке доступных приложений на страницах параметров камеры и микрофона или могут по-прежнему иметь доступ к камере или микрофону, даже если эти параметры отключены. Узнать причину
Настройка камер видеонаблюдения в приложении «Дом» на iPhone
В приложении «Дом» можно просматривать видео с камер видеонаблюдения в Вашем доме. С помощью любой камеры, совместимой с HomeKit, можно просматривать видеотрансляции в приложении «Дом», выбирать пользователей, которым доступны эти трансляции, и настраивать уведомления при обнаружении активности.
Список совместимых камер видеонаблюдения см. на веб-сайте аксессуаров для умного дома, управляемого с помощью приложения «Дом».
Если у Вас есть одна или несколько камер с поддержкой функции «Защищенное видео HomeKit», Вам доступны дополнительные преимущества, перечисленные ниже.
Зашифрованное видео.
Видео, записываемое Вашими камерами, анализируется и защищается шифрованием на устройстве, которое Вы используете в качестве домашнего центра (HomePod, Apple TV или iPad), а затем безопасно выгружается в iCloud. Благодаря этим мерам безопасности видео можете просматривать только Вы, а также люди, которым Вы предоставили доступ к нему.Съемка видео. При наличии подписки на iCloud+ можно просматривать видеозаписи с камер видеонаблюдения, записанные при обнаружении активности, за последние 10 дней. В зависимости от тарифного плана поддерживается от одной камеры до неограниченного количества камер. Тарифный план iCloud+ на 50 ГБ поддерживает одну камеру; тарифный план iCloud+ на 200 ГБ поддерживает до пяти камер; тарифный план iCloud+ на 2 ТБ поддерживает неограниченное количество камер.
Примечание. Видеоконтент с камер не засчитывается при расчете остатка свободного места в хранилище iCloud.
Зоны активности. Можно создавать зоны для фокусировки камеры на наиболее важных областях в рамках обзора камеры.
Распознавание лиц. Можно получать уведомления, когда отмеченные в приложении «Фото» люди появляются в области обзора камеры.
 Видео, записываемое Вашими камерами, анализируется и защищается шифрованием на устройстве, которое Вы используете в качестве домашнего центра (HomePod, Apple TV или iPad), а затем безопасно выгружается в iCloud. Благодаря этим мерам безопасности видео можете просматривать только Вы, а также люди, которым Вы предоставили доступ к нему.
Видео, записываемое Вашими камерами, анализируется и защищается шифрованием на устройстве, которое Вы используете в качестве домашнего центра (HomePod, Apple TV или iPad), а затем безопасно выгружается в iCloud. Благодаря этим мерам безопасности видео можете просматривать только Вы, а также люди, которым Вы предоставили доступ к нему.
См. разделы Сохранение зашифрованных записей с камер видеонаблюдения в iCloud с помощью функции «Защищенное видео HomeKit» и Настройка функции «Защищенное видео HomeKit» на всех устройствах в Руководстве пользователя iCloud.
Параметры камер
При добавлении камеры в приложение «Дом» Вы можете выбрать параметры потоковой передачи видео, а также назначить комнату для камеры. С помощью камеры с поддержкой функции «Защищенное видео HomeKit» можно также выбирать параметры записи. По умолчанию до четырех камер можно добавить в избранное и отображать на вкладке «Дом». Чтобы изменить эти настройки позже, коснитесь плитки Камеры, затем коснитесь кнопки . Отобразятся перечисленные ниже параметры.
Комната. Можно расположить камеру в одной из комнат дома либо создать комнату, если камера будет расположена снаружи дома, например над крыльцом или во дворе.
Уведомления. Коснитесь «Состояние и уведомления», выберите настройку, позволяющую получать уведомления, когда камера обнаруживает активность, изменяет состояние или переходит в режим офлайн.
Параметра записи для камер с поддержкой функции «Защищенное видео HomeKit». Вы можете создать разные настройки записи для применения, когда Вы дома и когда Вас нет дома. Например, когда Вы дома, можно прекращать трансляцию и запись видео с камеры, расположенной внутри дома, но при этом продолжать транслировать и записывать видео с камеры, расположенной снаружи.
Примечание. Приложение «Дом» использует геопозицию устройств, принадлежащих пользователям дома, для переключения между режимами «Дома» и «Не дома». К примеру, когда Вы уходите из дома, взяв с собой iPhone, камера переключается с настроек режима «Дома» на режим «Не дома».

Настройка уведомлений
На вкладке «Дом» коснитесь кнопки , затем коснитесь «Настройки дома».
Коснитесь «Камеры и дверные звонки».
Коснитесь камеры, для которой Вы хотите настроить уведомления.
Коснитесь «Уведомления» и включите «Уведомления об активности».
Камеры, совместимые с HomeKit, могут отправлять уведомление при обнаружении движения. Камеры с поддержкой функции «Защищенное видео HomeKit» могут также отправлять уведомления на основе следующих факторов:
наступление определенного времени суток;
присутствие или отсутствие кого-либо дома;
запись клипа;
обнаружение любого или определенного движения.
Когда Вы выбираете определенное движение, Вы получаете уведомление, когда камера обнаруживает людей, животных или транспортные средства или когда выполняется доставка. Для обнаружения доставленного объекта необходимо, чтобы он оставался в области обзора камеры после доставки.
Совет. Если выбрать определенный тип движения, клипов будет создаваться меньше и Вы будете получать меньше уведомлений, чем если камера настроена на обнаружение любого движения.
Общая длина видео с камер, которое Вам нужно просмотреть, также сократится. К примеру, если Вы выберете обнаружение людей, камера не будет начинать запись при обнаружении движения листьев деревьев или прыгающей с ветки на ветку белки.

 Общая длина видео с камер, которое Вам нужно просмотреть, также сократится. К примеру, если Вы выберете обнаружение людей, камера не будет начинать запись при обнаружении движения листьев деревьев или прыгающей с ветки на ветку белки.
Общая длина видео с камер, которое Вам нужно просмотреть, также сократится. К примеру, если Вы выберете обнаружение людей, камера не будет начинать запись при обнаружении движения листьев деревьев или прыгающей с ветки на ветку белки.Создание зон активности для камер с поддержкой функции «Защищенное видео HomeKit»
Вы можете создавать зоны, которые фокусируют камеру с поддержкой функции «Защищенное видео HomeKit» на наиболее важных областях в пределах ее обзора, например, на проходе к переднему фасаду, а не на тротуаре позади него. Затем Вы можете получать предупреждения, если в этих зонах обнаружено движение.
Примечание. Зоны активности можно создавать только для камер, настроенных на запись при обнаружении определенного типа движения. Зоны активности не влияют на автоматизации, связанные с распознаванием движения.
На вкладке «Дом» коснитесь плитки камеры, затем коснитесь кнопки .
Коснитесь «Выбрать зоны активности», коснитесь видео, чтобы создать зону, затем коснитесь «Добавление зоны».
Чтобы камера обнаруживала движение только за пределами указанной Вами зоны, коснитесь «Поменять зону».
Создайте любые дополнительные зоны в поле зрения камеры, например, одну для проезжей части, а другую — возле почтового ящика.
Коснитесь кнопки «Готово».

Чтобы удалить зону активности, нажмите «Выбрать зоны активности», нажмите внутри зоны, затем нажмите «Очистить».
Просмотр видео
На вкладке «Дом» коснитесь плитки камеры.
Автоматически начнет воспроизводиться потоковая трансляция в режиме реального времени.
Если Вы выбрали запись видео на камеру с поддержкой функции «Защищенное видео HomeKit», смахивайте по временной шкале в нижней части экрана для просмотра записанных клипов.
Коснитесь клипа, чтобы воспроизвести его.
Коснитесь «Прямой эфир», чтобы вернуться к просмотру видеотрансляции в режиме реального времени.
Когда камера настроена на обнаружение определенного типа движения, на временной шкале отображаются символы объектов, движение которых было обнаружено: людей, животных, транспортных средств и доставленных предметов.
Вы также можете просматривать видео в записи и в прямом эфире в приложении «Дом» на своем компьютере Mac, если на нем установлена macOS 10.15.1 или новее.
Выбор вариантов доступа
Чтобы разрешить другим людям смотреть видео с Ваших камер, выполните приведенную ниже последовательность действий.
Коснитесь , затем коснитесь «Настройки дома».
Выберите человека под заголовком «Люди».
Коснитесь «Камеры», затем выберите нужный вариант.
О том, как разрешить другим людям смотреть видео с Ваших камер, см. в разделе Разрешите другим пользователям управлять аксессуарами в Вашем доме.
См. такжеНастройка аксессуаров
Позиционирование/выравнивание | Основы машинного зрения
Позиционирование/выравнивание — еще один процесс, для которого введена обработка изображений, наряду с проверками количества и наличия деталей и изделий, внешнего вида (посторонние частицы, дефекты) и размеров (длина, диаметр). Позиционирование/выравнивание с использованием систем обработки изображений было введено для различных целей:
Позиционирование/выравнивание с использованием систем обработки изображений было введено для различных целей:
- Расположение стеклянных подложек
- Измерение смещения этикеток или штрих-кодов
- Проверка ориентации микросхем
- Проверка на смещение крышек пищевых контейнеров
- Позиционное управление станками (роботы с визуальным управлением)
В этом разделе представлены основные принципы и конкретные приложения позиционирования и выравнивания с использованием обработки изображений.
Основной принцип позиционирования/выравнивания для определения положения с помощью обработки изображений
Для быстрого и надежного позиционирования
Чтобы повысить эффективность производственных процессов, необходимо мгновенно определять позиционное соотношение между целью и станком или столом и тщательно контролировать систему.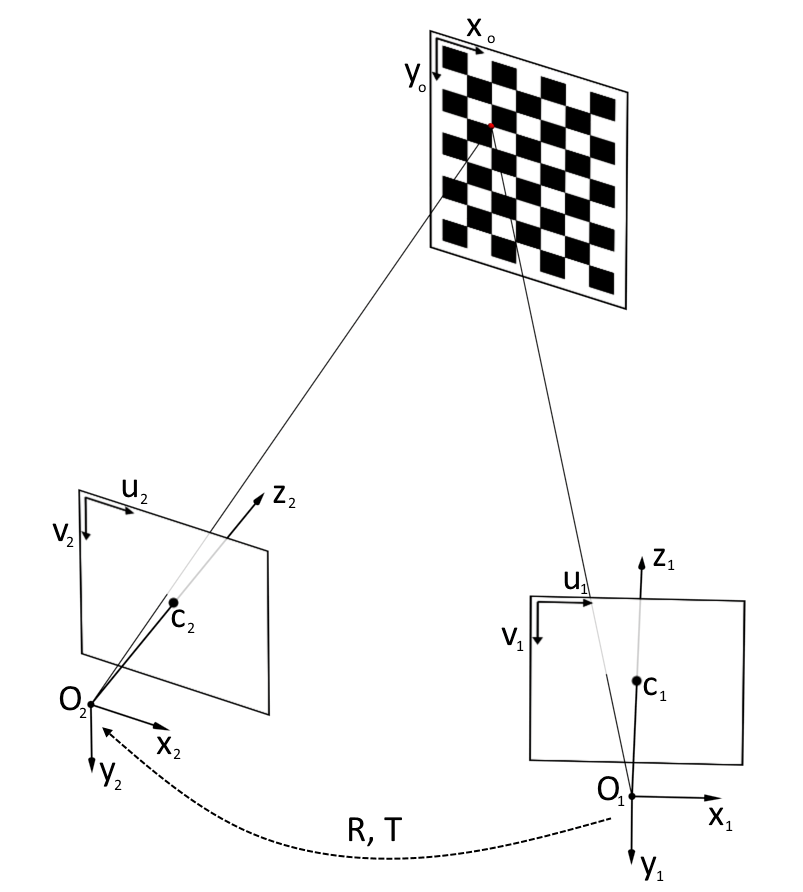 Низкая точность обнаружения может привести к дефектным заготовкам. Если между обнаружением и контролем есть временной лаг, производительность может снизиться. Точное и быстрое позиционирование/выравнивание имеет важное значение для автоматизации производства (FA). Обработка изображений все чаще используется для достижения этой цели.
Низкая точность обнаружения может привести к дефектным заготовкам. Если между обнаружением и контролем есть временной лаг, производительность может снизиться. Точное и быстрое позиционирование/выравнивание имеет важное значение для автоматизации производства (FA). Обработка изображений все чаще используется для достижения этой цели.
Скачать
Проблемы с позиционированием/выравниванием
Производство ЖК-панелей требует высокоточного позиционирования для таких процессов, как ламинирование стекла или пленки. Хотя в последние годы системы обработки изображений получили широкое распространение, у них было несколько проблем:
- Позиционирование с использованием систем обработки изображений требовало слишком много времени и труда для калибровки.
- Процесс функционировал как черный ящик, поэтому было сложно добавлять функции, а процессу не хватало универсальности.
- Требовались экспертные знания для достижения высокой точности и скорости позиционирования.
- Позиционирование не могло обеспечить требуемую точность, поэтому использование было ограничено.

В последние годы эти проблемы были решены благодаря автоматической калибровке, которая автоматически завершает калибровку, и повышенной точности выравнивания для направления системы в точное положение.
Скачать
Поток позиционирования с использованием обработки изображения
Первым важным моментом является понимание процесса позиционирования/выравнивания, использующего преимущества обработки изображений. В зависимости от системы обработки изображений могут быть некоторые различия в потоке. В этом разделе представлен основной процесс позиционирования с использованием «Серии XG-X» компании KEYENCE на примере ламинирования стекла.
Автокалибровка
Определите положение метки совмещения с помощью поиска по образцу (обработка поиска) или другим методом и вычислите направление оси столика и положение центра вращения.
Регистрация референтной позиции
Зарегистрируйте пункт назначения, в который будет перемещена цель.
Выравнивание
Измерьте положение цели и рассчитайте величину коррекции для достижения эталонного положения.
Позиционирование
Отправьте рассчитанную информацию о местоположении на ПЛК или другую хост-систему и управляйте сценой для выполнения позиционирования.
Скачать
Преимущества позиционирования с использованием обработки изображений
Использование систем обработки изображений для позиционирования/выравнивания дает множество преимуществ:
Высокоточное определение положения посредством поиска по образцу
Поиск шаблона (обработка поиска) — это метод, который необходим для позиционирования/выравнивания с использованием обработки изображений. Поиск шаблонов автоматически обнаруживает эталонные изображения или шаблоны (метки), известные как метки выравнивания или позиционирования. Использование коррекции дисторсии объектива и фильтров повышает точность определения положения.
Поиск шаблонов автоматически обнаруживает эталонные изображения или шаблоны (метки), известные как метки выравнивания или позиционирования. Использование коррекции дисторсии объектива и фильтров повышает точность определения положения.
Коррекция дисторсии объектива
До коррекции
После исправления
Коррекция искажения перспективы
До коррекции
После коррекции
Автокалибровка для улучшения такта
Традиционное управление положением на основе координат имело такие проблемы, как несоосность цели и стола и точность обнаружения, что препятствовало идеальному определению положения/угла. В последние годы точность автоматической калибровки значительно повысилась благодаря достижениям в технологии поиска шаблонов (поисковой обработки). Теперь возможна автоматическая высокоскоростная высокоточная калибровка, что приводит к улучшению такта.
Точный контроль, поддерживаемый высокоточным обнаружением с использованием обработки изображений
Метки совмещения теперь можно обнаруживать с высокой точностью с помощью машинного зрения с большим количеством пикселей и улучшенных технологий обработки изображений. ShapeTrax — это технология поиска профилей KEYENCE, обеспечивающая высочайшую точность в отрасли. Он позволяет определять положение с точностью до 0,025 пикселя как для линейности, так и для повторяемости.
ShapeTrax — это технология поиска профилей KEYENCE, обеспечивающая высочайшую точность в отрасли. Он позволяет определять положение с точностью до 0,025 пикселя как для линейности, так и для повторяемости.
В дополнение к обнаружению меток совмещения определение положения может быть достигнуто гибко в соответствии с потребностями каждого приложения даже без меток совмещения. Методы достижения этого включают обнаружение виртуального пересечения в углу печатной платы или позиционирование на основе выреза на пластине.
Обнаружение виртуального пересечения в углу печатной платы
Позиционирование на основе надреза пластины
Скачать
Позиционирование/выравнивание, достигаемое с помощью камер со сверхвысоким количеством пикселей
KEYENCE предлагает камеры со сверхвысоким количеством пикселей (21 мегапиксель), которые являются лучшим решением в отрасли. У широко используемых камер с меньшим количеством пикселей, таких как 0,3 или 2 мегапикселя, есть проблемы, показанные ниже. Камеры со сверхвысоким разрешением могут устранить эти проблемы.
У широко используемых камер с меньшим количеством пикселей, таких как 0,3 или 2 мегапикселя, есть проблемы, показанные ниже. Камеры со сверхвысоким разрешением могут устранить эти проблемы.
Вы когда-нибудь страдали от этих проблем?
Продукты со многими закругленными участками не могут стабильно обнаруживаться из-за нестабильного обнаружения углов.
Обычный
Когда закругленная поверхность большая, прямая часть слишком короткая для стабильного обнаружения угла.
Некоторые продукты не имеют прямой секции для обнаружения.
Когда 21-мегапиксельная камера используется для захвата всего изображения продукта
Отныне
Можно захватить все изображение продукта с сохранением обычной точности.
Это позволяет с высокой точностью определять профиль всей формы, даже когда изделие имеет сложную форму.
Когда 21-мегапиксельная камера используется для захвата всего изображения продукта, даже сложные профили могут быть обнаружены с высокой точностью. Это обеспечивает стабильное и точное выравнивание продуктов независимо от их формы.
Это обеспечивает стабильное и точное выравнивание продуктов независимо от их формы.
Переналадка требует много труда, поскольку на одной линии производятся разные продукты.
Обычный
Размеры изделий часто меняются. Это требует рабочей силы для изменения макета для каждой смены.
При использовании 21-мегапиксельной камеры для захвата всего изображения продукта
С этого момента
Для переключения не требуется никаких изменений макета.
Камеру можно зафиксировать в одном и том же положении, что делает механизм простым.
Чтобы обеспечить требуемую точность для камеры с низким разрешением, поле зрения должно быть меньше. Следовательно, когда на одной линии производятся разные продукты, компоновку камеры необходимо менять при каждой переналадке. Когда 21-мегапиксельная камера используется для захвата всего изображения продукта, переналадка больше не требуется. Камеру можно зафиксировать в одном и том же положении, что упрощает производственную систему. Кроме того, два или более продукта могут быть проверены одновременно.
Кроме того, два или более продукта могут быть проверены одновременно.
Проверка внешнего вида/размеров с использованием обработки изображения выполняется в процессе, отдельном от процесса выравнивания.
Обычный
Проверка внешнего вида или размеров выполняется в процессе, отдельном от процесса выравнивания.
Для этого необходимо построить масштабную систему.
При использовании 21-мегапиксельной камеры для захвата всего изображения товара
Отныне
Проверка внешнего вида или размеров изделия в целом может производиться одновременно с центровкой.
Во многих случаях проверка внешнего вида или размеров выполняется в процессе, отличном от процесса выравнивания. Когда 21-мегапиксельная камера используется для захвата изображения всего продукта, выравнивание и проверка внешнего вида продукта в целом могут выполняться одновременно. Это приводит к оптимизации производства.
Скачать
Практическое применение
Точность изделий возрастает, и для производственных процессов требуется высокая точность. Также необходимо повысить производительность, чтобы повысить урожайность. Чтобы удовлетворить эти требования, существует растущий спрос на позиционирование и выравнивание, использующие преимущества систем обработки изображений. Ниже приведены некоторые вводные примеры, в которых используются преимущества обработки и калибровки изображений.
Направляющие отверстия датчиков при сборке кузова автомобиля
Промышленные роботы незаменимы в производственных процессах, включая сварку, транспортировку и сборку. Традиционные системы требовали сложного обучения координатам для установки исходного положения и позиционирования. В зависимости от продукта или индивидуальных особенностей может потребоваться точная настройка. Позиционирование/калибровка с использованием обработки изображений может решить эти проблемы. В процессе сборки дверей или других тяжелых деталей можно использовать обработку изображений для распознавания направляющих отверстий и управления роботом. Это делает производство более быстрым и надежным. KEYENCE также предлагает роботизированные решения с визуальным управлением для промышленных роботов.
Позиционирование/калибровка с использованием обработки изображений может решить эти проблемы. В процессе сборки дверей или других тяжелых деталей можно использовать обработку изображений для распознавания направляющих отверстий и управления роботом. Это делает производство более быстрым и надежным. KEYENCE также предлагает роботизированные решения с визуальным управлением для промышленных роботов.
О роботах с визуальным управлением
Несоосность шаблонов
Для пластин, используемых в производстве полупроводниковых устройств, несоосность шаблона порядка микрометров может стать фатальным дефектом. Информация о местоположении относительно дефектов должна быть получена путем обнаружения с использованием таких инструментов, как оптические микроскопы. Например, когда используется серия XG-X, поддерживающая цветные камеры с разрешением 21 мегапиксель, можно точно обнаружить смещение шаблонов или положений, включая направление вращения пластин.
Сборка электронных компонентов
Поскольку смартфоны и планшеты становятся все более компактными, возрастает потребность в высокой точности сборки в электронной промышленности. Серия XG-X поддерживает 21-мегапиксельные цветные камеры с высоким разрешением и большим полем зрения, которые обеспечивают максимальное количество пикселей в своем классе. Он обеспечивает четкое обнаружение деталей чипов и обеспечивает высокоточное выравнивание. Он обеспечивает точную сборку даже мельчайших деталей, таких как электронные компоненты.
Сборка электронных компонентов
21-мегапиксельная камера
Возможности 21-мегапиксельной камеры
Изображение большой емкости в 21 миллион эффективных пикселей (5104 x 4092 пикселей) можно быстро передать с 16-кратной скоростью всего за 110 мс. Это позволяет обнаруживать мельчайшие дефекты и детали крупных целей, что было невозможно с помощью обычных камер.
0,31 мегапикселя
Все изображение выглядит размытым, ничего не различимо
5 мегапикселей
Профили чипов выглядят размытыми, и точное обнаружение затруднено.
21 мегапиксель
Все четко, включая детали, поэтому возможно точное суждение.
Выравнивание активного датчика | LUCID Vision Labs
Active Sensor Alignment сводит к минимуму наклон и вращение датчика изображения и размещает центр датчика на оптической оси объектива. Это достигается за счет анализа в реальном времени и настройки плоскости изображения в процессе размещения. Благодаря этому изображения получаются резкими и четкими даже в углах.- Главная страница
- Технические обзоры
- Выравнивание активного датчика
Выравнивание активного датчика
Понимание стадии, на которой датчик крепится к камере, имеет основополагающее значение для качества изображения этой камеры. Точное расположение датчиков позволяет камере создавать четкие и четкие изображения даже в углах. Датчик, расположенный по центру и плоский, максимизирует оптические характеристики вашего объектива. Этот процесс подключения не только влияет на качество изображения отдельной камеры, но также влияет на согласованность качества изображения между несколькими серийно выпускаемыми единицами одной и той же модели.
Это позволяет разработчикам приложений машинного зрения надежно определять свои оптические характеристики, не беспокоясь о чрезмерной настройке и отклонении от исходной спецификации при масштабировании своего приложения. Например, представьте, что вы производите несколько одинаковых систем машинного зрения, которые проверяют один и тот же продукт, но вам приходится каждый раз настраивать камеру и оптическую систему в соответствии с разными спецификациями, или, что еще хуже, вам приходится возвращать и ждать замену камеры, потому что оптические характеристики не соответствуют заявленным. уровни толерантности. LUCID применяет Active Sensor Alignment в процессе производства камеры, чтобы свести к минимуму отклонения единиц и обеспечить качественное изображение для каждой камеры Triton и Atlas.
Содержание
Активная юстировка сенсора
В идеальном мире…
Проблемы размещения сенсора
Пассивная юстировка
Активная юстировка сенсора: правильное размещение у источника Заключение
В идеальном мире.
 ..
..В идеальном мире оптический центр сенсора, наклон, поворот и заднее фокусное расстояние (BFD) были бы одинаковыми для всех камер. В этом сценарии размещение датчика будет определено и проверено один раз, а затем применено к каждому будущему устройству во время производства. Однако в реальном мире есть небольшие различия в каждом из компонентов, из которых состоит камера, включая угол, центр и глубину оправы объектива камеры в зависимости от положения датчика на плате формирователя изображения на печатной плате.
Вверху: Если бы все компоненты камеры были сделаны идеально, датчик можно было бы разместить в одном и том же месте для каждого устройства.
Вверху: преувеличенная анимация некоторых переменных, связанных с компонентами камеры. Это приводит к несоответствиям с точным размещением датчика внутри камеры.
Проблемы с размещением сенсора
Возможно, есть небольшая разница в одном из компонентов, например, разная толщина припоя под датчиком изображения или наклон матрицы датчика изображения в корпусе. Хотя эта разница может быть незаметна невооруженным глазом, ее влияние на качество изображения будет заметным. Это может привести к разнице заднего фокусного расстояния в области сенсора и, например, к размытому углу изображения. Приведенные ниже анимации являются преувеличенными примерами некоторых проблем, с которыми разработчики приложений машинного зрения могут столкнуться из-за плохо выровненных сенсоров камеры.
Хотя эта разница может быть незаметна невооруженным глазом, ее влияние на качество изображения будет заметным. Это может привести к разнице заднего фокусного расстояния в области сенсора и, например, к размытому углу изображения. Приведенные ниже анимации являются преувеличенными примерами некоторых проблем, с которыми разработчики приложений машинного зрения могут столкнуться из-за плохо выровненных сенсоров камеры.
Слева: Наклон сенсора вызывает различия в фокусных точках в плоскости сенсора. В центре: нестандартное вращение датчика может усложнить установку камеры. Справа: иногда оправа объектива может быть немного смещена от центра, что может привести к затемнению углов. Производители камер закупают компоненты у нескольких поставщиков и должны убедиться, что они соответствуют требуемым спецификациям. Затем камеру собирают в надежде, что все совпадет. это называется Пассивное выравнивание .
Для пассивного выравнивания, чтобы выявить неисправные камеры перед отправкой, проверка качества изображения традиционно проводится после изготовления камеры.
Выравнивание активного датчика: правильное размещение у источника
Гораздо более точный и эффективный способ обеспечения правильного размещения датчика называется Выравнивание активного датчика . В процессе размещения датчика система размещения измеряет центр изображения, вращение, наклон и заднее фокусное расстояние, активно регулируя положение датчика на основе обратной связи от визуальных измерений.
Слева: на датчик наложен световой узор. Любые несоответствия в наклоне, вращении и глубине будут искажать световой рисунок. Эти искажения измеряются и компенсируются перемещением датчика с помощью системы 6 степеней свободы (справа). Отсюда датчик настраивается на правильное положение в режиме реального времени.
Смоделированный пример смещения угла на 30 микрометров
Ниже приведены смоделированные примеры изображений с 12,3-мегапиксельного CMOS-сенсора Sony IMX304 1,1 дюйма с объективом 6 мм и диафрагмой f2,8.
Глядя на поперечное сечение оптического пути, активное выравнивание гарантирует, что датчик находится на правильном фокусном расстоянии с равным расстоянием от центра датчика до краев.
Заключение
Использование этого метода позволяет точно разместить датчик с линейным выравниванием и разрешением по наклону микрометров. Датчики меньшего размера выигрывают от точного центрирования. Даже незначительное смещение центра может отрицательно повлиять на монтажное положение камеры. Для сенсоров большего размера незначительные изменения наклона могут привести к существенным различиям в фокусных точках на изображении.
Датчики всех камер Altas и Triton активно выравниваются во время производства.
Что такое автоматическое выравнивание проекции на основе камеры?
Автоматическое выравнивание проекций на основе камеры позволяет интеграторам, операторам шоу и конечным пользователям выравнивать и калибровать любое количество проекционных каналов в куполах, сложных проекционных поверхностях, плоских или криволинейных поверхностях экономичным способом.
В этой статье мы рассмотрим следующие темы:
Что такое автоматическое выравнивание на основе камеры?
- Что такое автоматическое выравнивание на основе камеры?
- Пример сценария прямого эфира
- Каковы преимущества автоматического выравнивания?
- Сколько камер вам нужно?
Геометрическая коррекция (деформация) и плавное смешивание нескольких проекторов на сложной поверхности может быть утомительной и трудоемкой задачей.
Процесс прост: тестовые изображения проецируются на проекционную поверхность, цифровые камеры фиксируют эти тестовые изображения и передают их обратно в систему, где они анализируются. Когда анализ завершен, результат экспортируется на медиа-сервер, а проецируемые изображения автоматически деформируются и смешиваются, чтобы соответствовать поверхности.
Пример сценария прямого эфираПредставьте, что вы киномеханик, ответственный за настройку проекции на корпоративном мероприятии в большом бальном зале. Клиент запросил установку из шести проекторов на волнообразном экране. После установки проекторов на ферме вы монтируете и выравниваете свои камеры и маркеры, подключаете их к системе вместе с PoE (Power over Ethernet) для питания камеры и сети, а также подключаете сетевой штекер питания для маркеров.
Все должно быть подготовлено для запуска в процессе автоматической повторной калибровки.
Первоначальная настройка проекта выравнивания включает в себя определение/измерение экрана, захват позиций маркеров, запуск генератора шаблонов и выполнение первой калибровки для экспорта данных деформации и смешивания.
По завершении вы можете просмотреть настройки и убедиться, что все в порядке.
Придя на место на следующее утро, вы понимаете, что не очень дружелюбный дворник случайно задел проектор, из-за чего идеально ровное вчерашнее изображение выглядит далеко не идеальным.
Это происходит, когда вы нажимаете повторное выравнивание, и через несколько минут (поскольку повторное выравнивание выполняется быстрее, чем первоначальная настройка) вы готовы к работе с идеально смешанным изображением.
Каковы преимущества автоматического выравнивания?Использование полностью автоматизированной системы калибровки камеры дает множество преимуществ.
- Быстрая настройка
Сокращение времени на настройку снижает трудозатраты на установку – и время можно потратить на другие дела.- Снижение требований к обучению
Переналадка «на кончиках ваших пальцев» снижает потребность в длительном и дорогостоящем обучении персонала.
- Снижение затрат на техническое обслуживание
Благодаря возможности переустановки всей установки без присутствия на месте высококвалифицированного специалиста затраты на техническое обслуживание резко сокращаются.Сколько камер вам нужно?
- Постоянное великолепное изображение
Благодаря возможности использования установленной камеры (или нескольких) и программного обеспечения для автоматического повторного выравнивания проекционной установки вы можете быть уверены, что ваша аудитория всегда будет видеть высокое качество — проекционное изображение.Камеры должны видеть всю проецируемую поверхность. В некоторых установках вам потребуется только одна камера, в то время как в других вам потребуется более одной.
Фото предоставлено:
Фотография-иллюстрация (фото в заголовке) с сайта domeprojection.com® и их инсталляция в Павильоне Четырех рек The Arc (Тэгу, Южная Корея). Большая бесшовная проекция 60 м x 20 м из 34 каналов.
Фото иллюстрации (ниже) с сайта domeprojection.com® и их PALM EXPO 2014 в Мумбаи, Индия. Проекция была создана BARTKRESA design, известным специалистом в области проекционного картирования domeprojection.com® и партнером Dataton Omagica с использованием ProjectionTools.
Темы: автоматическое выравнивание камеры, калибровка камеры, выравнивание проекции, камера, омагика, многоканальная проекция, сферы, купола, сложные поверхности, проекционное отображение, автоматическое выравнивание, domeprojection.
Что означают результаты калибровки камеры в Metashape? : Портал службы поддержки
Metashape поддерживает четыре основных типа камер: рамочная камера, камера типа «рыбий глаз», сферическая камера и цилиндрическая камера. В этой статье мы рассмотрим результаты калибровки камеры типа Frame .
В этой статье описаны следующие разделы:
- Параметры калибровки камеры
- Пример «неправильной» калибровки
- График искажения
- Вкладка «Искажение»
- Вкладка «Профиль»
- Вкладка «Корреляция»
Фотограмметрическая калибровка камер выполняется для определения значений параметров внутреннего ориентирования камер, в т.ч. объектив.
Параметры калибровки камеры
Можно определить следующие параметры калибровки:
f — Фокусное расстояние измеряется в пикселях (в пикселях).
cx, cy — Координаты главной точки, т.е. координаты пересечения оптической оси объектива с плоскостью сенсора (в пикселях).
b1, b2 — Коэффициенты сродства и неортогональности (перекоса) (в пикселях).
k1, k2, k3, k4 — Коэффициенты радиальной дисторсии (безразмерные).
р1, р2 — Коэффициенты тангенциальной дисторсии (безразмерные).
Исходные данные калибровки будут скорректированы на этапе обработки Align Photos . После завершения этапа обработки Align Photos данные скорректированной калибровки будут отображаться на вкладке Adjusted диалогового окна Camera Calibration .
Пример «неправильной» калибровки
Рекомендуем просмотреть скорректированные значения параметров cx, cy, b1 и b2 в Калибровка камеры Диалоговое окно. Если значения параметров слишком велики (сотни и более для cx, cy и десятки и более для b1, b2), то может быть целесообразно повторно выровнять набор данных, зафиксировав эти параметры.
Обычно значения cx и cy составляют около пары десятков пикселей (или меньше), так как значения измеряются от центра изображения. А значения для b1 и b2 обычно не превышают нескольких единиц.
Если значения составляют сотни или даже тысячи — это указывает на то, что оценка параметров калибровки, вероятно, неверна. Иногда это может быть связано со спецификой полетного задания, например, если камера не поворачивается на 180 градусов на соседних линиях полета. Вы можете попробовать исправить указанные параметры и заново выровнять набор данных, отключив опцию «адаптивная подгонка модели камеры».
График искажения
Metashape предоставляет ряд инструментов для анализа результатов калибровки камеры. Чтобы получить доступ к графику искажения , выберите соответствующий параметр в контекстном меню группы камер в диалоговом окне Калибровка камеры .
Вкладка Distortion
Вкладка Distortion в диалоговом окне Distortion Plot представляет расчетный график искажения для выбранной камеры. Total, Radial, Decentering, Corrections и Residual параметры доступны на вкладке.
График искажения представляет значения и направление искажения в соответствии с скорректированными значениями калибровочного коэффициента. Он показывает график в режиме дискретных векторов для центральной точки в соответствующей ячейке изображения.
- Всего — отображает рассчитанное общее значение всех параметров калибровки камеры.
- Радиальное — отображает суммарный вектор для коэффициентов k1, k2, k3, k4 .
- Децентрирование — отображает суммарный вектор для коэффициентов b1, b2 и p1, p2.
- Исправления — на этой вкладке будут отображаться параметры , если в процессе оптимизации вы включили параметр Подобрать дополнительные исправления, , в противном случае вкладка «Коррекция» будет пустой.
Остатки опция для График искажения представлен график адекватности примененной модели камеры. Обратите внимание, что остатки усредняются по ячейке изображения, а затем по всем изображениям в группе камер. Ссылка на шкалу под графиком указывает масштаб искажений/остатков.
График остатков и диаграммы для Искажения имеют разное значение.Вкладка «Профиль»
Вкладка «Профиль» представляет два графика для радиальных и децентрирующих искажений и того, как их значения в пикселях увеличиваются с расстоянием от центра фотографии.
Вкладка Корреляция
Вкладка Корреляция содержит:
- Столбец Значение содержит скорректированные значения внутренних параметров ориентации камеры. Те же значения представлены на вкладке Adjusted диалогового окна Camera Calibration .
- В столбце Ошибка представлены значения стандартного отклонения для внутренних параметров ориентации камеры.
- Значения корреляции для внутренних параметров ориентации камеры — отражают степень корреляции между соответствующими параметрами.
Metashape вычисляет ковариационную матрицу для результатов настройки пакета. Ковариационная матрица фиксирует неопределенность преобразования. Диагональные элементы ковариационной матрицы – дисперсии, σ ii 2 ; положительный квадратный корень из дисперсии σ называется стандартным отклонением .
Внедиагональные элементы ковариационной матрицы являются ковариациями, σ ij . Значение каждой ковариации отражает степень корреляции между соответствующими параметрами.
Выравнивание камеры и балансировка экспозиции
Разделы «Обзор» и «Попробуй» дают общее представление о процессе. Последующие разделы содержат более подробную информацию и могут использоваться в качестве справочных материалов.
Процесс выравнивания камеры и балансировки экспозиции обеспечивает автоматическое выравнивание каналов и балансировку экспозиции для изображений, снятых с помощью многокамерной системы.
Многокамерная установка может получать сотни и тысячи кадров изображений, каждый из которых состоит из нескольких каналов. Поскольку каждый спектральный диапазон снимается отдельной камерой, результирующие полосы изображения не совмещаются правильно друг с другом. Кроме того, цифровые камеры предназначены для автоматической настройки выдержки и ISO для каждого кадра (исходя из общей яркости сцены), что означает, что полученные изображения имеют разную экспозицию.
Этот процесс предназначен для устранения этих проблем в три операции: он выполняет многоканальное выравнивание для каждого кадра, выравнивает экспозицию от одного кадра к другому и создает таблицу контрастности для набора изображений.
Обработка кадров происходит очень быстро, обычно требуется менее одной секунды на кадр после начального выравнивания. Полная съемка с дрона может быть обработана в полевых условиях на портативном компьютере, как правило, за меньшее время, чем первоначальный полет. Результатом процесса является соответствующее выходное изображение для каждого входного изображения. Обратите внимание, что результирующие изображения не имеют географической привязки или мозаики.
Процесс выравнивания камеры и балансировки экспозиции, показывающий траекторию полета.
Выбранный кадр представлен красной точкой в окне Track View.многокамерная установка — несколько датчиков с отдельными камерами на БПЛА (дроне) или пилотируемом самолете. Каждая камера настроена на получение «фотографии» для определенного диапазона спектра (например, красного, зеленого или диапазона длин волн NIR). Камеры смонтированы вместе на жесткой раме и синхронизированы, чтобы сделать снимок одновременно. Этот набор фотографий, сделанных одновременно, является единственным кадром в наборе изображений, полученных во время полета.
изображение — этот процесс работает с многоканальными изображениями, но, вообще говоря, изображение для данной сцены может состоять из одного или нескольких растров для одной и той же области на местности.
кадр — одно изображение в серии изображений, снятых последовательно. Изображения собираются по траектории полета, и каждое изображение имеет номер кадра, указывающий порядок, в котором оно было получено.
В контексте получения аэрофотоснимков «кадр» может также относиться к физической конструкции, на которой установлены камеры.
совместная регистрация — каналы в растровом изображении считаются совмещенными, если они выровнены и объекты правильно расположены (наложены) в каждом канале.
Необходимые навыки : Отображение геопространственных данных и концепций продуктов TNT.
Демонстрационные данные : Загрузите файл micasense_red_edge.zip для использования с приведенными здесь упражнениями. Эти данные содержат 15 кадров с камеры MicaSense RedEdge.
Обучающие уроки:
Следующие пять уроков проведут вас через весь процесс от начала до конца.
- Вход нагрузки
- Посмотрите на смещенные полосы с помощью Image View
- Создать новую базовую модель выравнивания с использованием выбранного кадра
- Оценка точности базовой модели центровки
- Запустить процесс и оценить результаты
Кадры изображений, загруженные в процессе выравнивания Rig Camera & Exposure Balancing.
Основные шаги для запуска процесса: выбрать папку с входными файлами, создать или выбрать базовую модель выравнивания, проверить, правильно ли модель выравнивает все кадры, и если да, то запустить процесс.
Используйте пример данных micasense_red_edge.zip для следующих упражнений. См. раздел «Ввод» для получения информации о получении изображений.
Упражнение 1. Загрузка входных данных
- Извлеките файлы .tif из файла micasense_red_edge.zip в папку
- открыть процесс выравнивания камеры и балансировки экспозиции
- выберите Модель: MicaSense RedEdge
- нажмите кнопку «Открыть папку» и выберите папку с файлами .tif
- просмотрите список входных кадров и обратите внимание, что выбран номер кадра 0001
- нажмите Track View и обратите внимание, что номер кадра 0001 обозначен красной точкой
- в главном диалоговом окне щелкните другую строку в списке ввода и найдите соответствующую красную точку в окне просмотра дорожки.
- закрыть окно Track View
- снова выбрать номер кадра 0001
- в списке ввода щелкните правой кнопкой мыши поле «Включить в вывод» (для любого кадра) и выберите «Включить по диапазону высот».
- просмотрите значения в столбце Высота над уровнем моря списка ввода
- установить диапазон от 213,00 до 214,00
- щелкните поле «Включить в вывод» для кадра 0001, чтобы включить его снова.
Отображение смещенных полос на входном изображении — увеличение масштаба и расположение мыши вдоль
края объекта. Посмотрите на различные положения перекрестия в каждой полосе (слева). Тот самый кадр
отображается уменьшено масштабирование трехполосных составных слоев, также демонстрирующих смещение (справа).(продолжение предыдущего упражнения)
Упражнение 2.
- щелкните Просмотр изображений и обратите внимание, что окно просмотра изображений находится в режиме предварительного просмотра и показывает полосы в выбранном кадре
- настроить отображение 4 видов (разделенный вид)
- дополнительно настроить, какие полосы отображаются в каждом представлении (через раскрывающийся список)
- увеличение края элемента (с помощью колеса прокрутки мыши)
- настроить часть изображения, которую вы видите (с помощью щелчка мыши и перетаскивания)
- наведите курсор на вид с NIR-изображением и сравните с перекрестием слежения в других видах, обратите внимание, что они не совпадают
(продолжение предыдущего упражнения)
Упражнение 3. Создание новой базовой модели выравнивания с использованием выбранного кадра
- в главном диалоговом окне с выбранным номером кадра 0001 нажмите «Автоматическое выравнивание» и при появлении запроса назовите базовую модель выравнивания (вычисление займет некоторое время)
- посмотрите в окно просмотра изображений и обратите внимание, что предварительный просмотр был обновлен
- в главном диалоговом окне выберите другой кадр в списке ввода и изучите его (затем снова выберите кадр номер 0001)
(продолжение предыдущего упражнения)
Упражнение 4.
- в режиме просмотра изображений, увеличьте масштаб и просканируйте изображение, чтобы убедиться, что совместная регистрация подходит для всех диапазонов.
- используйте параметр «Добавить» в списке каналов и добавьте составной слой, чтобы увидеть, как каналы накладываются друг на друга в одном слое.
- выберите другой кадр в списке ввода и проверьте его (когда закончите, снова выберите кадр номер 0001)
Показан режим предварительного просмотра для проверки базовой модели выравнивания (слева) и режим последнего обработанного результата.
после запуска процесса (справа) имеют ту же коррекцию выравнивания. Различия Вы видите
, что балансировка экспозиции и таблица контрастности были применены к конечному результату (справа).(продолжение предыдущего упражнения)
Упражнение 5.
- в главном диалоговом окне с выбранным номером кадра 0001 нажмите кнопку Run
- при появлении запроса выберите, куда поместить выходные папки: CRTIFF (.tif) и CRRVC (.rvc)
- когда он завершится, сравните режимы Preview и Last Processed Result
- увеличьте масштаб в 1 раз и просканируйте изображение, чтобы убедиться, что совместная регистрация подходит для всех диапазонов.
- щелкните «Просмотр гистограммы», чтобы открыть окно «Гистограммы» (оставьте его открытым)
- щелкните Корреляция каналов изображения, чтобы открыть окно Корреляция каналов изображения (оставьте его открытым)
- выберите другой кадр в списке ввода в главном диалоговом окне и обратите внимание, что окна анализа обновляются для выбранного кадра
Операция многоканального выравнивания
Эта операция изменяет выборку каналов изображения для правильного наложения объектов и совместного выравнивания растров.
Изображения, полученные с многокамерной установки, будут иметь полосы (в одном кадре), которые слегка смещены или не совпадают друг с другом. Во-первых, базовая модель выравнивания строится с использованием системы отсчета. Результирующая модель содержит корректировки, необходимые для правильного выравнивания каналов со всех камер. Когда процесс запущен, полосы передискретизируются с использованием базовой модели.
Операция выравнивания каналов предназначена для работы с изображениями, полученными на плоской поверхности на той же высоте над землей. Прежде чем запускать процесс на всем наборе кадров изображений, необходимо создать базовую модель выравнивания, специфичную для установки камеры и высоты над землей (т. е. в пределах разумного диапазона значений высоты).
базовая модель выравнивания — созданная модель для конкретной установки и высоты, которая используется для автоматического выравнивания полос в наборе изображений.
ведущая камера — процесс устанавливает одну камеру в качестве ведущей и выясняет, какие корректировки необходимы для согласования с ней полос от других камер. Например, на установке MicaSense главной является NIR-камера, которая имеет самую широкую полосу пропускания и самое четкое изображение.
Изображение, которое вы используете для создания базовой модели выравнивания, является важным фактором. На самом деле, запланированный полет, чтобы сделать эталонные «фотографии», идеален. Выберите плоскую область с множеством четких пространственных элементов по всей сцене (например, линии на парковке). Получите отдельное эталонное изображение для любой высоты, на которой вы планируете получить изображения. Модели, созданные на основе эталонного изображения, можно затем использовать для всех изображений, снятых на одной высоте с использованием одной и той же установки камеры. После того, как у вас есть базовые модели совмещения, вы сможете правильно совместить любое полученное изображение, даже если оно не имеет отличительных особенностей.
Совет: при сохранении модели укажите в имени высоту камеры (над уровнем земли).
Операция балансировки экспозиции
Этап балансировки экспозиции корректирует изменения времени экспозиции и/или настроек ISO от одного кадра к другому. Он также исправляет виньетирование.
При захвате полосы изображения камера записывает значения яркости участка земли для определенного диапазона длин волн. Однако камеры автоматически регулируют скорость затвора и ISO от одного кадра к другому в зависимости от общей сцены (т. е. более ярких или темных элементов). Это приводит к различным значениям записанной яркости для одного и того же объекта, что нежелательно при использовании растровых значений в качестве измерений. (Например, представьте одно и то же дерево в двух последовательных кадрах, где один кадр в целом намного ярче другого. Значения растровых ячеек для одного и того же дерева не будут одинаковыми в двух кадрах.
Работа с таблицей контрастности
Таблицы контрастности также создаются для результирующих изображений и автоматически используются при их отображении. Таблица контрастности одинакова для всех кадров и рассчитывается на основе общего диапазона значений всех кадров.
Анализ — проверка ввода, выравнивания основания и результатов
Инструменты анализа доступны для пользователя, чтобы проверить ввод, просмотреть результаты модели выравнивания основания и изучить окончательные результаты. Изучите выбранную строку (кадр) в списке ввода с помощью этих окон анализа: , Просмотр изображений , Просмотр гистограммы и Корреляция каналов изображения .
После создания или выбора базовой модели выравнивания убедитесь, что она правильно выравнивает другие кадры во входном наборе. Используйте Image View с параметром Preview и настройте его для отображения нескольких представлений (через Split View). Наведите курсор на основную полосу на краях элементов и посмотрите на соответствующие положения перекрестия над другими полосами. Увеличьте масштаб, чтобы убедиться, что совместные регистрации точны.
Совет: отобразите диапазон основной камеры в одном представлении и сравните его один за другим с каждым из других диапазонов. Каждая полоса должна быть проверена, чтобы убедиться, что модель выравнивания правильно перемещает ее относительно эталона.
Если модель приводит к кадру со смещенными полосами, у вас есть варианты: исключить кадр из обработки (через Включить в вывод в списке входных кадров), пересчитать базовую модель выравнивания, используя другой входной кадр, или попробуйте настроить базовое выравнивание для каждого кадра (через опцию Уточнить выравнивание для каждого кадра).
Совет: посмотрите на высоту смещенного кадра и убедитесь, что она находится в пределах 20% от предполагаемой высоты. Если высота недостаточно близка к другим, рамка будет неправильно выровнена. Исключите кадры в начале и в конце траектории полета, если они имеют разную высоту.
Входными данными процесса являются необработанные изображения, полученные с многокамерной установки, где каждая полоса получается с помощью собственного датчика и объектива (камеры). Одновременно может быть обработано любое количество кадров, снятых за один полет.
Получить изображение
Изображения должны быть получены в узком диапазоне высот. Отдельные кадры за пределами этого диапазона, например, в начале и в конце траектории полета, могут быть исключены из обработки. Точная высота зависит от высоты камеры над землей. Обратите внимание, что высота, отображаемая в списке входных кадров, является высотой GPS, которая не совпадает с высотой камеры над землей.
Если у вас еще нет базовой модели выравнивания (рассчитанной для той же буровой установки и той же высоты), не забудьте включить изображение с хорошими границами элементов, которые можно использовать для ее создания.
Выберите ввод
Входные файлы должны храниться в структуре папок, указанной для выбранной модели камеры. Каждая система риг-камеры имеет свои собственные требования к организации и названию файлов. Эта структура определяет, какой файл соответствует каждой полосе и порядок дорожек изображения (номер кадра). Поддерживаемые многокамерные установки включают модели MicaSense, Parrot, MAPIR, SlantRange и SAL Engineering.
Если вашей системы видеокамеры нет в списке, свяжитесь с MicroImages по поводу возможности ее добавления. Как правило, будут включены только коммерчески доступные (т. е. не изготовленные на заказ) системы буровой установки и камеры.
Выберите модель камеры, затем откройте папку, чтобы загрузить изображения. Папки с изображениями, не относящимися к выбранной модели буровой установки, не будут доступны для выбора.
Настройка ввода
После выбора входной папки каждый входной кадр отображается в порядке по номеру кадра, который вычисляется на основе порядка добавления. При необходимости исключите кадр из обработки, сняв флажок «Включить в вывод» рядом с номером кадра. Список кадров включает столбцы с информацией EXIF о каждой полосе в этом кадре, включая: долготу, широту, высоту, индекс экспозиции (EI), чувствительность ISO, время экспозиции (Exp) и уровень черного (Blk).
Значок «Настройки» позволяет выбрать, какие столбцы отображать (например, чувствительность ISO и время экспозиции).
Доступны элементы управления для установки порядка выходных полос и указания структуры объекта/файла.
Две папки результатов:
CRTIFF — содержит скорректированный камерой и совместно зарегистрированный набор файлов .tif и новый файл GPSdata.csv.
CRRVC – содержит скорректированные камерой и совместно зарегистрированные файлы .rvc с растровыми объектами (связанные с соответствующим файлом .tif в папке CRTIFF).
«CR» — это соглашение об именах по умолчанию, которое является аббревиатурой для скорректированных камерой и совместно зарегистрированных изображений.
Два выходных файла:
RigAlignSettings.ini – сохраняет настройки последнего запуска, которые сохраняются в той же папке, что и входные изображения.
GPSdata.csv — содержит данные GPS в формате для использования в программном обеспечении для фотограмметрии (например, Pix4Dmapper Pro или SimActive Correlator 3D)
Окно выравнивания камеры и балансировки экспозиции
Верхняя панель инструментов
Верхняя панель инструментов главного окна процесса.
Открыть папку – выбрать папку с входными файлами. Установите Модель до выбора ввода.
Выполнить — Используйте значок «Выполнить» для создания выходных данных. После запуска доступны значки «Просмотр гистограммы» и «Корреляция каналов изображения».
Следующие параметры (на верхней панели инструментов) открывают окна анализа для оценки входных и результирующих изображений: Просмотр трека , Просмотр изображений , Просмотр гистограммы и Корреляция каналов изображения .
Модель – выберите модель камеры из списка, который включает в себя:
- Попугай Секвойя
- Хлорофилл попугая
- MicaSense RedEdge-MX
- MicaSense RedEdge-M
- MicaSense RedEdge
- MicaSense Altum
- Ядро MAPIR (предварительно повернутое)
- Ядро MAPIR
Auto-Align — используется для создания базовой модели выравнивания камеры с использованием текущего выбранного изображения. Используйте Image View для предварительного просмотра базовой модели выравнивания на выбранном изображении. Нажмите «Автоматическое выравнивание», чтобы заменить или создать новую базовую модель выравнивания.
Настройки
Префикс файла результатов – добавить текст в начало имени файла, по умолчанию ‘IMG_’
Суффикс файла – добавить текст в конец имени файла, по умолчанию ‘_CR’.
Имя подпапки TIFF – содержит результаты. По умолчанию используется «CRTIFF».
Имя подпапки RVC – содержит результаты. По умолчанию используется «CRRVC».
Наименование растровых (связных) объектов – называйте объекты, используя название группы, аббревиатуру группы или код группы.
Именование подпапки диапазона – назовите подпапку, используя имя диапазона, аббревиатуру диапазона, код диапазона или длину волны.
Однодиапазонный суффикс файла — добавьте текст к имени файла, используя параметры «Имя диапазона», «Аббревиатура диапазона», «Код диапазона», «Длина волны» или «Последовательно».
Автоматически определять выходную папку из ввода — если выключено, пользователю предлагается выбрать выходную папку после выбора «Выполнить».
Перенос соответствующих метаданных из источника в выходной . Метаданные включают: размеры в пикселях, битовую глубину, разрешение (DPI), производителя и модель камеры.
Обрабатывать ячейки с нулевым значением как нулевые – если включено, 0 ячеек не будут обрабатываться.
Список чувствительности ISO и времени экспозиции – показать столбцы в списке ввода.
Список уровней черного, если применимо – показать столбец в списке ввода.
Группировать повторяющиеся столбцы по камерам — полезно для камер с одним датчиком (модель Байера). Это позволяет избежать отображения повторяющихся столбцов в главном окне, поскольку настройки экспозиции всегда одинаковы для всех диапазонов. (Для настоящих мультисенсорных камер, таких как MicaSense, этот параметр не действует.)
Список входных кадров
Каждая строка представляет собой кадр и показывает столбцы с информацией EXIF для всех диапазонов (т. е. файлы .tif). Фоны столбцов имеют цветовую кодировку для быстрой идентификации полос (например, красный, зеленый, синий и т. д.).
Перечисленные метаданные включают:
Включить в поле «Вывод» — включает параметры правой кнопки мыши: «Включить все», «Исключить все» и «Включить по диапазону высот».
Номер кадра – порядковый номер для каждого входного кадра. Он устанавливается процессом в том порядке, в котором перечислены кадры.
Долгота/Широта – долгота и широта самолета в момент захвата изображения.
Высота — высота GPS камеры над средним уровнем моря в метрах.
EI – индекс экспозиции, который представляет собой комбинацию времени экспозиции и настройки ISO. Значения EI меняются по мере того, как дрон пролетает над различными объектами (например, ярким песком и темной водой).
Чувствительность ISO – Чувствительность ISO.
Exp – Время экспозиции.
Блок – черные (Blk) значения (темновой ток).
Параметры
Output Bands — по умолчанию есть выход для каждого входного диапазона. Выберите «Другое», чтобы указать номер полосы для каждой выходной полосы и/или исключить полосы из выходных данных.
Коррекция виньетирования – автоматическое виньетирование/коррекция плоского поля при наличии соответствующих коэффициентов.
Коэффициент переопределения — введите значение от 0 до 1, чтобы переопределить (или указать, если он недоступен) коэффициент виньетирования.
Настройка переменного освещения с использованием эталонного диапазона – компенсация переменных условий освещения с помощью выбранного диапазона для настройки других.
Уточнить выравнивание для каждого кадра — используется для настройки базового выравнивания для каждого кадра. Это точно настраивает каждый кадр отдельно, когда процесс запущен. Попробуйте этот вариант, если кадры сделаны на существенно разной высоте над землей. Если включено, скорость процесса значительно замедлится.
Окно просмотра трека
Показать местоположения точек GPS на подходящем эталонном изображении (или слое Bing), чтобы показать пройденный трек и при необходимости помочь исключить начальное и конечное изображения.
Окно Track View с эталонным изображением Bing.
Красная точка указывает на выбранный входной кадр.Окно просмотра изображений
Просмотр автоматически контрастных расширенных комбинаций, соответствующих выбранному входному изображению. Назначьте спектральную полосу каждому компоненту цвета дисплея (красному, зеленому и синему). Одновременно может отображаться до четырех представлений.
Показать предварительный просмотр — предварительный просмотр коррекции выравнивания с использованием выбранной базовой модели выравнивания на выбранном кадре.
Показать последние обработанные результаты — после запуска процесса показывает результат для выбранного входного изображения. Регулировка выравнивания останется прежней для кадра, используемого для создания базовой модели выравнивания, однако она будет выглядеть по-другому, поскольку применяется контраст.
Сравните кадры предварительного просмотра (предварительно обработанные) и обработанные (выровненные) в любой 3-канальной комбинации или в оттенках серого, до 4 одновременных отображений. Увеличьте масштаб, чтобы увидеть, является ли совместная регистрация точной.
Выберите полосу или составной слой из раскрывающегося списка
или используйте опцию «Добавить», чтобы настроить новый составной слой.Окно просмотра гистограммы
Многоканальная гистограмма с возможностью просмотра одного выбранного входного кадра и/или общей гистограммы для всех кадров.
Гистограммы для каждой полосы выбранного изображения (жирная линия)
накладывается на общую сумму для всех изображений (более слабая линия).Окно корреляции каналов изображения
Корреляция каналов изображения для каналов в выбранном входном кадре с автоматическим отслеживанием значений ячеек на основе положения курсора в окне просмотра изображения.
Окно корреляции каналов изображения.
Калибровка путем ручного выравнивания — документация Calcam
Несмотря на то, что лучшим и наиболее точным методом калибровки является калибровка по точкам, в некоторых случаях это просто невозможно, поскольку четко определенные точки не могут быть идентифицированы на изображении (например, камеры с узким углом обзора, которые на станке видны только круглые или изогнутые элементы). В этом случае Calcam предоставляет инструмент для калибровки путем ручного перемещения вида камеры с помощью мыши до тех пор, пока он не совпадет с калибруемым изображением камеры.
Загрузка изображения для калибровки
В верхней части вкладки управления изображением камеры находится группа элементов управления для загрузки изображения, которое необходимо откалибровать. В раскрывающемся списке From выберите источник, из которого вы хотите загрузить изображение. Доступные стандартные параметры: загрузка из файла изображения (по умолчанию) или загрузка изображения из другой калибровки Calcam. Если вы определите какие-либо пользовательские источники изображений (см. Источники изображений), они также появятся в этом раскрывающемся меню.
Настройки текущего изображения
После загрузки изображения на вкладке Изображение с камеры появляется раздел Текущее изображение, содержащий информацию и настройки для текущего изображения. Элементы управления включают
Известный размер пикселя : Если вы знаете размер пикселя камеры, его можно ввести здесь. Это не имеет никакого значения для калибровки, за исключением того, что фокусное расстояние может отображаться в миллиметрах вместо пикселей, что может быть полезно, если вы знаете ожидаемое эффективное фокусное расстояние оптики камеры.
Геометрические преобразования : Элементы управления для преобразования изображения, чтобы получить его «правильный путь вверх». Рекомендуется всегда загружать изображения в Calcam в том виде, в котором они исходят из камеры, как необработанные, а затем использовать эти элементы управления, чтобы получить изображение прямо для калибровки. Кнопка :guilabell:Растянуть по вертикали на’ предназначена для камер с неквадратными пикселями или анаморфотной оптикой.
Маскирование вида
Маскирование вида можно использовать, когда оптическое изображение не заполняет весь детектор, чтобы отметить, какие части изображения содержат фактическое изображение. Это можно настроить, нажав кнопку «Определить…» рядом с текстом Маскирование изображения. При нажатии на кнопку открывается следующее диалоговое окно:
В этом окне показано изображение слева, где любая маска показана штриховкой разного цвета. Под изображением находится ползунок, который можно использовать для управления непрозрачностью затенения.
Без маскирования
Это значение по умолчанию для вновь загруженного изображения. Используйте эту опцию, если у вас есть простое изображение с использованием всей области сенсора.
Изображение окружено темной рамкой
Этот параметр можно использовать для маскирования изображения методом заливки. При выборе этого параметра вы можете щелкнуть области, где нет изображения, чтобы «залить» маску, исключая эти пиксели из калибровки. Когда вы выбираете эту опцию, все изображение отображается в цвете. Когда вы нажимаете на области, чтобы пометить их как не содержащие изображения, эти области становятся серыми. Многократный щелчок по изображению добавляет любую область, на которую был нажат щелчок, в исключенную область. Если алгоритм заливки выделяет слишком мало или слишком много изображения, можно настроить пороговое значение и размер медианного фильтра для алгоритма заливки с помощью предоставленных элементов управления.
Произвольная маска
Этот параметр можно использовать для загрузки произвольной маски изображения, если метод заливки не может быть использован для достаточного определения маски. Для этого подготовьте файл изображения, в котором пиксели, содержащие изображение, закрашены одним цветом, а пиксели, не содержащие изображения, залиты другим цветом. Часто бывает полезно сохранить копию калибруемого изображения для использования в качестве шаблона/слоя при создании изображения маски. Вы можете сохранить копию калибруемого изображения с помощью кнопки «Сохранить калибровочное изображение…».
Если вы довольны конфигурацией маскирования изображения, нажмите «Применить». Если вы нажмете «Отмена», никакие изменения не будут применены к конфигурации маскирования.
Обратите внимание, что конфигурация маскирования изображения не повлияет на отображение графического интерфейса пользователя при выполнении калибровки, но маскирование применяется к результирующей калибровке.
Эффекты отображения изображения
Применение эффектов к изображению может упростить согласование изображения и CAD. Поле «Отображение изображения» появляется под полем «Текущее изображение» при загрузке изображения. Доступны следующие настройки: * Без эффекта : Показать изображение без дальнейшей обработки полупрозрачно поверх вида САПР. * Enhance : Применение улучшения изображения для повышения контрастности элементов изображения. * Обнаружение краев : Примените детектор краев Canny к изображению и отобразите обнаруженные края только наложенными на изображение CAD.
Загрузка модели САПР
В верхней части вкладки управления моделью машины находятся элементы управления для загрузки модели САПР для калибровки. Предусмотрены два раскрывающихся списка для выбора загружаемой модели САПР и варианта модели. Кнопка «Загрузить» справа от варианта модели загружает модель.
Включение/выключение функций модели САПР
Для моделей САПР, состоящих из нескольких частей в отдельных файлах сетки, отдельные файлы сетки можно включить или отключить, установив или сняв отметку с них на панели «Включить/выключить функции». Это можно сделать для отдельных деталей, групп деталей (если они определены в модели САПР) или всей модели.
Тип рендеринга модели САПР
В некоторых случаях может быть проще оценить соответствие между изображением и моделью САПР, если модель визуализируется в виде каркаса/контура, а не в виде обычного твердого тела. Для этого в нижней части вкладки «Модель машины» внешний вид модели САПР можно переключать между твердотельным телом и контуром каркаса. Кроме того, можно установить цвет выбранной детали модели САПР.
Выполнение калибровки совмещения
В отличие от калибровки по точечной подгонке, при ручной калибровке совмещения внутренние параметры камеры (фокусное расстояние и искажение) задаются отдельно от внешних параметров (положения и направления обзора). В разделах ниже объясняется, как установить каждый из них.
Внутренние параметры камеры
Внутренние параметры камеры настраиваются с помощью верхней части вкладки управления калибровкой выравнивания.
Existing Calibration Intrinsics
Чтобы использовать встроенные функции из существующей калибровки Calcam, выберите Использовать встроенные функции из существующей калибровки и найдите нужную калибровку. Загруженную калибровку можно изменить с помощью кнопки «Загрузить…». Любое маскирование изображения в загруженной калибровке также будет применено (его можно отредактировать, как описано в разделе «Маскирование вида» выше).
Калибровка шахматной доски Intrinsics
Для подготовки изображений шахматной доски: сделайте плоскую шахматную мишень с известным размером квадрата (существуют различные PDF-файлы для печати, доступные при поиске в Интернете). Затем сделайте несколько снимков этой шахматной мишени перед камерой в различных положениях, ориентациях и расстояниях до камеры. В приведенном ниже примере показаны эскизы набора калибровочных изображений шахматной доски:
Чтобы использовать изображения шахматной доски для определения внутренних свойств камеры, выберите Калибровать по изображениям шахматной доски. При первом выборе этой опции откроется следующее окно:
Загрузка шахматной доски состоит из 4 шагов, выполняемых по порядку в правой части этого окна. Сначала найдите и выберите все изображения шахматной доски для использования. Затем введите детали рисунка шахматной доски: количество квадратов и размер квадрата. Затем нажмите кнопку «Определить углы шахматной доски», чтобы запустить автоматическое определение границ между квадратами шахматной доски.
Внутренние характеристики обскуры
Если точная калибровка внутренних характеристик недоступна, для определения внутренних характеристик можно использовать идеализированную модель камеры-обскуры.
Внешние элементы камеры
Внешние элементы камеры задаются путем ручной настройки вида модели САПР до тех пор, пока он не совпадет как можно лучше с изображением, отображаемым сверху. Это можно сделать с помощью комбинации управления мышью и ручного ввода числовых значений. Как и в случае с внутренними параметрами, внешние настраиваются на вкладке управления калибровкой выравнивания.
Начиная с существующего вида
Часто бывает проще начать выравнивание с вида, определенного в определении модели САПР, или с другой калибровки Calcam.
Управление мышью
Вправо Щелкните + Перетащите — Осмотритесь (управление в стиле шутера от первого лица; по умолчанию) или поверните модель CAD 9000 в зависимости от настроек
Средний Нажмите + Перетащите — Панорамируйте (переведите) вбок, т.
 Хотя эта стратегия может быть эффективной, она требует очень много времени и средств. Камеры, не прошедшие этот тест, уже собраны, и производитель должен решить, должны ли эти камеры быть отправлены обратно и разобраны, проверены, переделаны или выброшены. Кроме того, они также должны проверять и идентифицировать партии компонентов, которые привели к этим недостаткам. В конечном счете, это приводит к более жестким допускам на компоненты камеры, что увеличивает стоимость и потенциальные потери. Именно из-за этого некоторые производители камер полностью пропускают инспекционные испытания или вместо этого расширяют допуски камер и отгружают камеры как есть, чтобы снизить затраты за счет качества.
Хотя эта стратегия может быть эффективной, она требует очень много времени и средств. Камеры, не прошедшие этот тест, уже собраны, и производитель должен решить, должны ли эти камеры быть отправлены обратно и разобраны, проверены, переделаны или выброшены. Кроме того, они также должны проверять и идентифицировать партии компонентов, которые привели к этим недостаткам. В конечном счете, это приводит к более жестким допускам на компоненты камеры, что увеличивает стоимость и потенциальные потери. Именно из-за этого некоторые производители камер полностью пропускают инспекционные испытания или вместо этого расширяют допуски камер и отгружают камеры как есть, чтобы снизить затраты за счет качества. В системе используется автоматизированный механический блок с 6 степенями свободы (6DoF) и блок визуального контроля. Блок визуального контроля анализирует визуальный рисунок, наложенный на плоскость датчика, и измеряет однородность резкости рисунка. Например, если система измеряет угол, который немного не в фокусе, она будет регулировать наклон датчика, пока он не окажется в фокусе. Как только он рассчитает максимальный уровень резкости в плоскости сенсора, он зафиксирует все компоненты на месте.
В системе используется автоматизированный механический блок с 6 степенями свободы (6DoF) и блок визуального контроля. Блок визуального контроля анализирует визуальный рисунок, наложенный на плоскость датчика, и измеряет однородность резкости рисунка. Например, если система измеряет угол, который немного не в фокусе, она будет регулировать наклон датчика, пока он не окажется в фокусе. Как только он рассчитает максимальный уровень резкости в плоскости сенсора, он зафиксирует все компоненты на месте.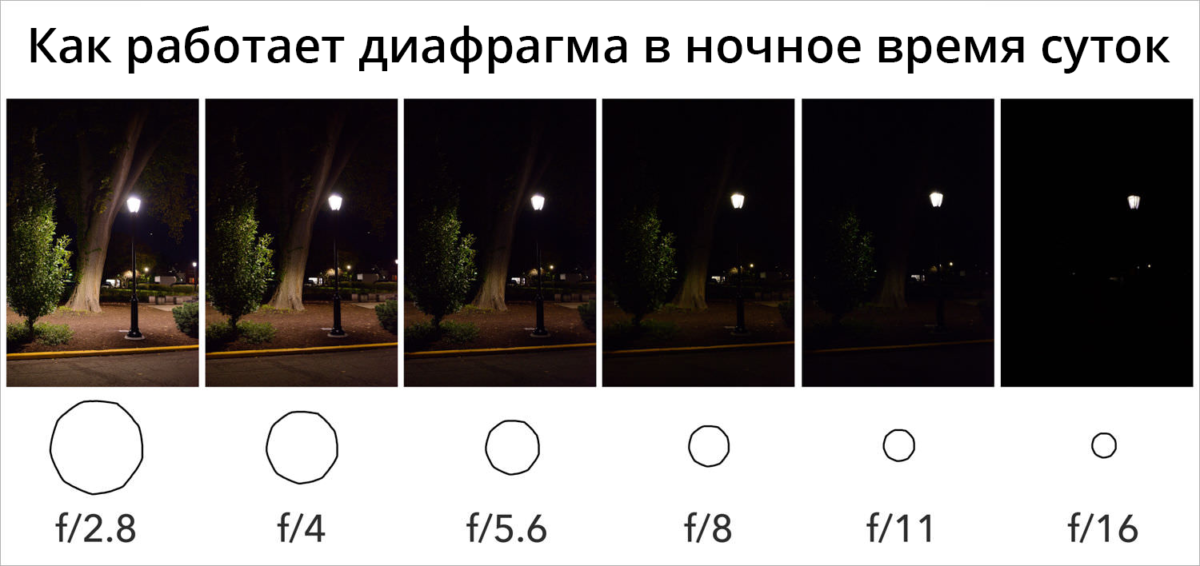 Пример изображения с пассивным выравниванием моделируется с угловым смещением 30 микрометров. Смещение углов датчиков может быть вызвано многими факторами, в том числе разным количеством паяльной пасты внутри или снаружи корпуса датчика. Система активного выравнивания датчика LUCID позволяет точно регулировать микрометры, чтобы уменьшить эти зависимости.
Пример изображения с пассивным выравниванием моделируется с угловым смещением 30 микрометров. Смещение углов датчиков может быть вызвано многими факторами, в том числе разным количеством паяльной пасты внутри или снаружи корпуса датчика. Система активного выравнивания датчика LUCID позволяет точно регулировать микрометры, чтобы уменьшить эти зависимости. Для тех приложений машинного зрения, которые требуют высокого уровня точности камеры, активное выравнивание датчика является важным производственным этапом, который обеспечивает более точный уровень резкости изображения, чем традиционное пассивное выравнивание.
Для тех приложений машинного зрения, которые требуют высокого уровня точности камеры, активное выравнивание датчика является важным производственным этапом, который обеспечивает более точный уровень резкости изображения, чем традиционное пассивное выравнивание. Использование автоматизированной системы выравнивания проекций камеры может сэкономить время и энергию как для первоначальной калибровки, так и для повторной калибровки.
Использование автоматизированной системы выравнивания проекций камеры может сэкономить время и энергию как для первоначальной калибровки, так и для повторной калибровки. .
. В дополнение к описанному выше сценарию фиксированные установки, а также любое живое событие выиграют от автоматической системы выравнивания.
В дополнение к описанному выше сценарию фиксированные установки, а также любое живое событие выиграют от автоматической системы выравнивания.
 com
com Параметры калибровки камеры можно ввести вручную, если они были получены в ходе процедуры предварительной калибровки.
Параметры калибровки камеры можно ввести вручную, если они были получены в ходе процедуры предварительной калибровки.


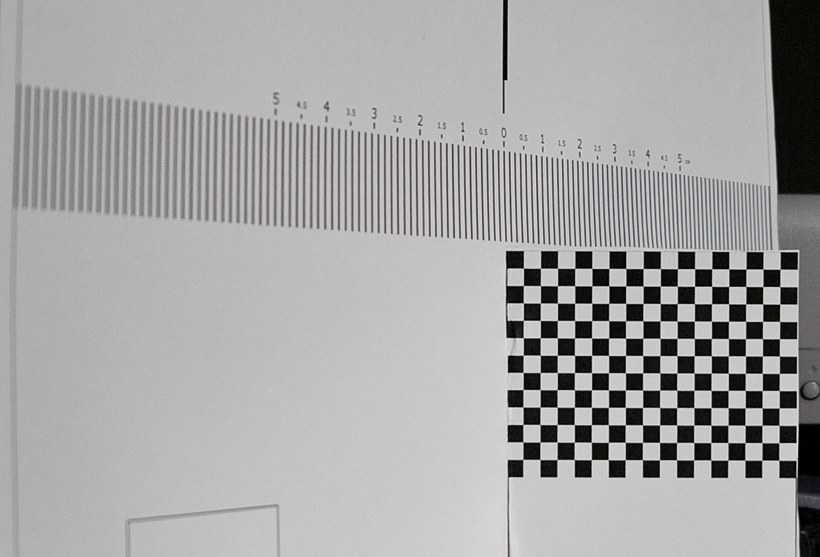 Значение коэффициентов вычисляется по формуле для каждой точки изображения (XY) в координатах изображения. Формулы, описывающие коэффициенты искажения в Metashape, можно найти в руководстве пользователя в Приложении C.
Значение коэффициентов вычисляется по формуле для каждой точки изображения (XY) в координатах изображения. Формулы, описывающие коэффициенты искажения в Metashape, можно найти в руководстве пользователя в Приложении C. Включение функции Подгонка дополнительных коррекций (см. диалоговое окно ниже) рекомендуется для случаев, когда искажения камеры плохо описываются моделью по умолчанию (в Metashape используется модель искажения Брауна).
Включение функции Подгонка дополнительных коррекций (см. диалоговое окно ниже) рекомендуется для случаев, когда искажения камеры плохо описываются моделью по умолчанию (в Metashape используется модель искажения Брауна). Изображение графика Distortion (график искажений) представляет значения и направление искажения в соответствии с скорректированными значениями калибровочного коэффициента, тогда как график Residuals представляет усредненные ошибки перепроецирования для связующих точек, обнаруженных на исходных изображениях (усредненные по всем изображения калибровочной группы и внутри определенных «ячеек» на изображениях). На заметку: График невязок (для ошибок повторного проецирования связующих точек) также отображается на калибровочных страницах документа отчета, в то время как график Искажений не включен в отчет и доступен только в диалоговом окне Калибровка камеры .
Изображение графика Distortion (график искажений) представляет значения и направление искажения в соответствии с скорректированными значениями калибровочного коэффициента, тогда как график Residuals представляет усредненные ошибки перепроецирования для связующих точек, обнаруженных на исходных изображениях (усредненные по всем изображения калибровочной группы и внутри определенных «ячеек» на изображениях). На заметку: График невязок (для ошибок повторного проецирования связующих точек) также отображается на калибровочных страницах документа отчета, в то время как график Искажений не включен в отчет и доступен только в диалоговом окне Калибровка камеры .  Профили могут быть сохранены как изображения.
Профили могут быть сохранены как изображения.
 Пошаговые обучающие уроки включены.
Пошаговые обучающие уроки включены. Доступны следующие инструменты анализа, которые помогут настроить процесс и проверить входные данные и результаты на каждом этапе: Просмотр трека , Просмотр изображений , Просмотр гистограммы и Корреляция каналов изображения .
Доступны следующие инструменты анализа, которые помогут настроить процесс и проверить входные данные и результаты на каждом этапе: Просмотр трека , Просмотр изображений , Просмотр гистограммы и Корреляция каналов изображения .



 Посмотрите на смещенные входные полосы с помощью просмотра изображений
Посмотрите на смещенные входные полосы с помощью просмотра изображений Оцените точность базовой модели выравнивания
Оцените точность базовой модели выравнивания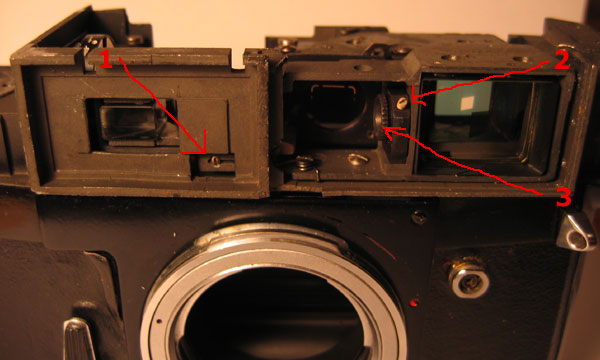 Запуск процесса и оценка результатов
Запуск процесса и оценка результатов В частности, одна полоса используется в качестве основной, а другие полосы настраиваются в соответствии с ней.
В частности, одна полоса используется в качестве основной, а другие полосы настраиваются в соответствии с ней.

 )
Таким образом, балансировка экспозиции корректирует это, соответствующим образом изменяя значения ячеек. Эта операция предполагает, что количество солнечного света одинаково для всех кадров.
)
Таким образом, балансировка экспозиции корректирует это, соответствующим образом изменяя значения ячеек. Эта операция предполагает, что количество солнечного света одинаково для всех кадров.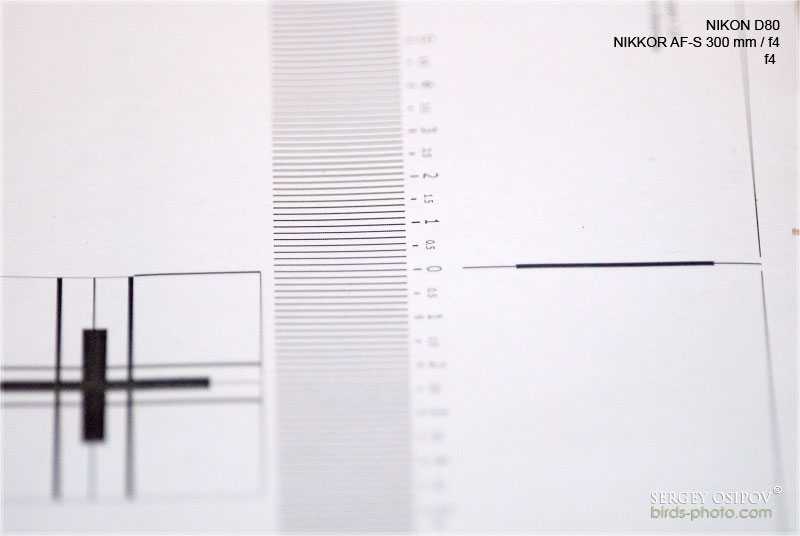 Кроме того, опция View Track позволяет увидеть траекторию полета для всех кадров.
Кроме того, опция View Track позволяет увидеть траекторию полета для всех кадров.


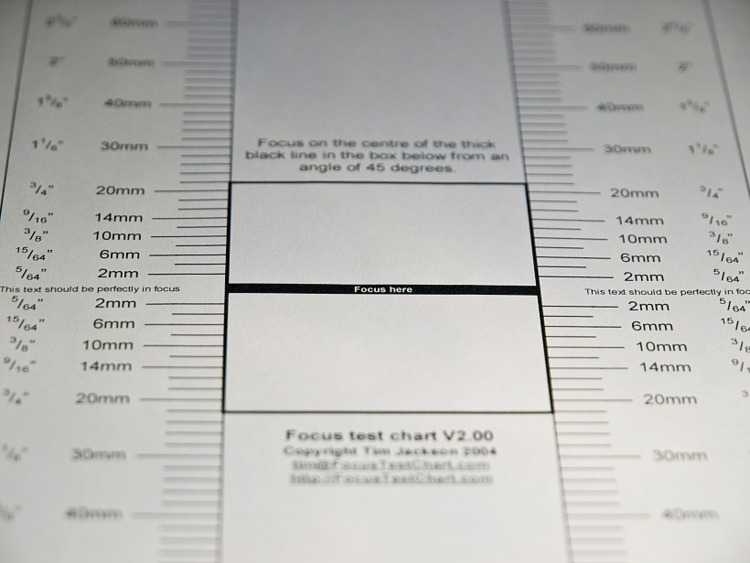 Выберите вывод изображений в виде многослойных или многостраничных файлов TIFF или с каждым диапазоном в отдельном файле. Выходная папка и соглашения об именах файлов устанавливаются с помощью значка «Настройки».
Выберите вывод изображений в виде многослойных или многостраничных файлов TIFF или с каждым диапазоном в отдельном файле. Выходная папка и соглашения об именах файлов устанавливаются с помощью значка «Настройки». Это позволяет загружать предыдущие настройки при повторном использовании входа, а также может использоваться для поиска соответствующего выхода. Этот файл специфичен для каждого набора данных. Этот шаг обычно занимает 1-2 минуты в зависимости от количества камер.
Это позволяет загружать предыдущие настройки при повторном использовании входа, а также может использоваться для поиска соответствующего выхода. Этот файл специфичен для каждого набора данных. Этот шаг обычно занимает 1-2 минуты в зависимости от количества камер.
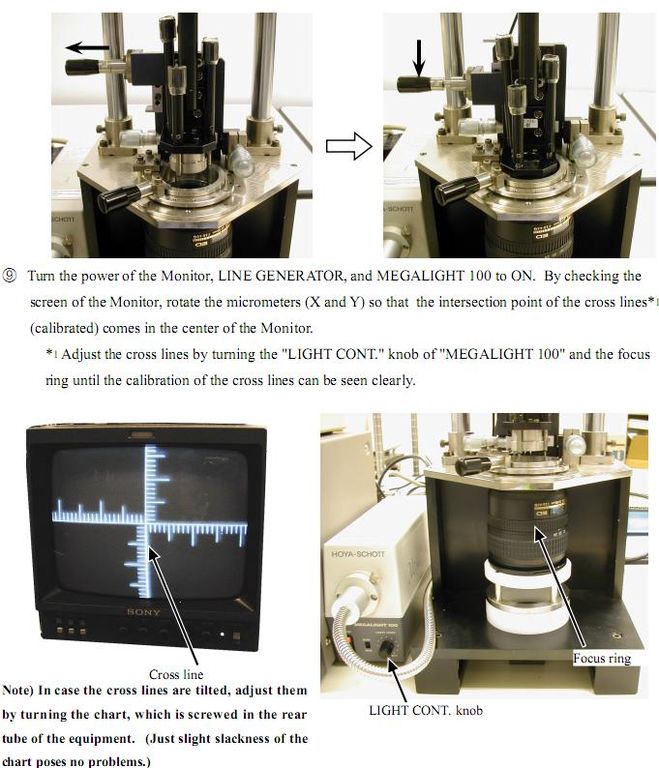
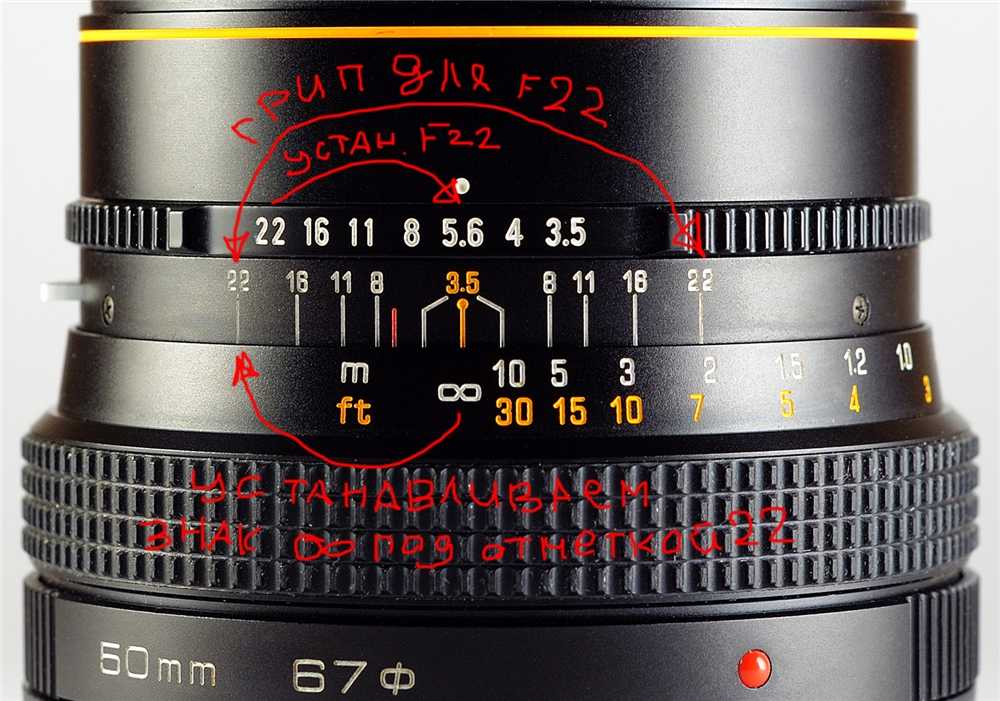

 вывод в файл или папку — Многополосный в одном файле, Многостраничный в одном файле, Однополосный все в одной папке и Однополосный во вложенных папках. Баланс экспозиции – автоматическая компенсация разницы экспозиции между кадрами. Такие различия могут быть связаны с автоматическим
регулировка экспозиции на камере при полете над яркими и темными поверхностями. Это улучшает сопоставление изображений, позволяя использовать весь диапазон сенсора.
вывод в файл или папку — Многополосный в одном файле, Многостраничный в одном файле, Однополосный все в одной папке и Однополосный во вложенных папках. Баланс экспозиции – автоматическая компенсация разницы экспозиции между кадрами. Такие различия могут быть связаны с автоматическим
регулировка экспозиции на камере при полете над яркими и темными поверхностями. Это улучшает сопоставление изображений, позволяя использовать весь диапазон сенсора.

 Когда общие и отдельные гистограммы отображаются вместе, параметр «Процент» для вертикального масштаба графика позволяет сравнивать их на одном графике.
Когда общие и отдельные гистограммы отображаются вместе, параметр «Процент» для вертикального масштаба графика позволяет сравнивать их на одном графике. Это будет намного более успешным, если внутренние параметры камеры можно точно откалибровать, например. с использованием калибровочных изображений шахматной доски в лаборатории, оставляя только внешние параметры, определяемые «вручную». Ручная калибровка в настоящее время поддерживает только изображения с одним дополнительным представлением. Инструмент ручной калибровки можно запустить из программы запуска Calcam. Внешний вид окна показан ниже:
Это будет намного более успешным, если внутренние параметры камеры можно точно откалибровать, например. с использованием калибровочных изображений шахматной доски в лаборатории, оставляя только внешние параметры, определяемые «вручную». Ручная калибровка в настоящее время поддерживает только изображения с одним дополнительным представлением. Инструмент ручной калибровки можно запустить из программы запуска Calcam. Внешний вид окна показан ниже: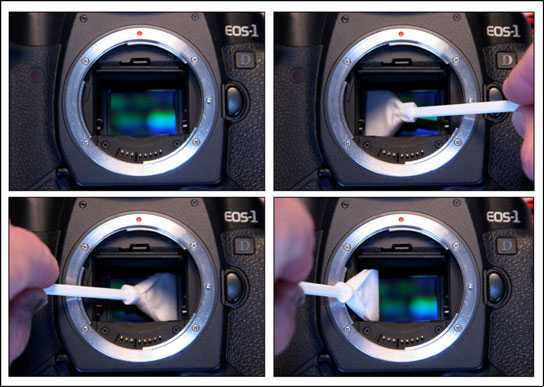 После выбора источника изображения под раскрывающимся списком появляются соответствующие входные данные для настройки загрузки изображения. После заполнения соответствующих полей нажмите кнопку «Загрузить», чтобы загрузить изображение. Затем изображение отображается на дисплее CAD + Image в левой части окна. Невозможно масштабировать или панорамировать изображение; он всегда подходит к окну. Модель САПР будет отображаться за изображением.
После выбора источника изображения под раскрывающимся списком появляются соответствующие входные данные для настройки загрузки изображения. После заполнения соответствующих полей нажмите кнопку «Загрузить», чтобы загрузить изображение. Затем изображение отображается на дисплее CAD + Image в левой части окна. Невозможно масштабировать или панорамировать изображение; он всегда подходит к окну. Модель САПР будет отображаться за изображением.
 Управление мышью для изображения такое же, как и для изображения в главном окне калибровки. В правой части окна находятся различные параметры, которые можно выбрать для определения маскирования изображения:
Управление мышью для изображения такое же, как и для изображения в главном окне калибровки. В правой части окна находятся различные параметры, которые можно выбрать для определения маскирования изображения: Увеличение этих значений означает, что при каждом щелчке будет выбираться большая область. Если вы выбрали слишком большую область для исключения и вам нужно начать заново, используйте кнопку «Сброс», чтобы очистить маскирование и начать заново. Когда закончите, часть датчика, содержащая изображение, должна быть показана с наложением цвета, а часть, не содержащая изображения, должна быть затенена серым цветом, как в примере ниже.
Увеличение этих значений означает, что при каждом щелчке будет выбираться большая область. Если вы выбрали слишком большую область для исключения и вам нужно начать заново, используйте кнопку «Сброс», чтобы очистить маскирование и начать заново. Когда закончите, часть датчика, содержащая изображение, должна быть показана с наложением цвета, а часть, не содержащая изображения, должна быть затенена серым цветом, как в примере ниже.
 Когда выбран этот параметр, доступны следующие дополнительные элементы управления: ползунки для порогов обнаружения краев, которые можно настроить для улучшения обнаружения краев, и палитра цветов для выбора цвета отображаемых краев.
* Непрозрачность дисплея : При ручной калибровке изображение отображается полупрозрачно поверх модели САПР. Если эффект или выравнивание гистограммы не обнаружены, этот ползунок управляет непрозрачностью изображения: сдвиньте влево, чтобы сделать изображение менее заметным, сдвиньте вправо, чтобы сделать изображение более непрозрачным поверх CAD. Этот ползунок не отображается, когда используется определение края, когда края отображаются с полной непрозрачностью.
Когда выбран этот параметр, доступны следующие дополнительные элементы управления: ползунки для порогов обнаружения краев, которые можно настроить для улучшения обнаружения краев, и палитра цветов для выбора цвета отображаемых краев.
* Непрозрачность дисплея : При ручной калибровке изображение отображается полупрозрачно поверх модели САПР. Если эффект или выравнивание гистограммы не обнаружены, этот ползунок управляет непрозрачностью изображения: сдвиньте влево, чтобы сделать изображение менее заметным, сдвиньте вправо, чтобы сделать изображение более непрозрачным поверх CAD. Этот ползунок не отображается, когда используется определение края, когда края отображаются с полной непрозрачностью. Под раскрывающимся списком вариантов модели находится флажок с надписью 9.1168 Включить функции модели по умолчанию при загрузке : если флажок установлен, все части модели САПР по умолчанию загружаются сразу после загрузки самой модели. Если флажок не установлен, определение модели будет загружено, но никакие данные 3D-сетки не будут загружены, и вместо этого вы сможете включать функции по отдельности. Это полезно при работе с большой моделью на медленном компьютере, где вы не хотите ждать загрузки всей модели, если она не нужна. Вы можете перейти к другой модели или варианту САПР в любое время, выбрав другой элемент в раскрывающемся списке и снова нажав «Загрузить».
Под раскрывающимся списком вариантов модели находится флажок с надписью 9.1168 Включить функции модели по умолчанию при загрузке : если флажок установлен, все части модели САПР по умолчанию загружаются сразу после загрузки самой модели. Если флажок не установлен, определение модели будет загружено, но никакие данные 3D-сетки не будут загружены, и вместо этого вы сможете включать функции по отдельности. Это полезно при работе с большой моделью на медленном компьютере, где вы не хотите ждать загрузки всей модели, если она не нужна. Вы можете перейти к другой модели или варианту САПР в любое время, выбрав другой элемент в раскрывающемся списке и снова нажав «Загрузить». Это может быть полезно для повышения производительности при работе с большими моделями, если не все детали необходимы для конкретной калибровки, или для удаления деталей, которые мешают калибровке и усложняют ее.
Это может быть полезно для повышения производительности при работе с большими моделями, если не все детали необходимы для конкретной калибровки, или для удаления деталей, которые мешают калибровке и усложняют ее. Внутренние параметры камеры можно установить 3 различными способами: с использованием внутренних параметров существующей калибровки (например, для калибровки существующих настроек камеры и объектива, перемещенных в новый вид), с использованием изображений шаблона калибровки шахматной доски из лабораторных измерений или с использованием простой модели камеры-обскуры. Настоятельно рекомендуется использовать изображения шахматной доски, если это возможно, или другую калибровку calcam, поскольку это, вероятно, даст гораздо лучшие результаты и, вероятно, будет проще.
Внутренние параметры камеры можно установить 3 различными способами: с использованием внутренних параметров существующей калибровки (например, для калибровки существующих настроек камеры и объектива, перемещенных в новый вид), с использованием изображений шаблона калибровки шахматной доски из лабораторных измерений или с использованием простой модели камеры-обскуры. Настоятельно рекомендуется использовать изображения шахматной доски, если это возможно, или другую калибровку calcam, поскольку это, вероятно, даст гораздо лучшие результаты и, вероятно, будет проще.
 Если автоматическое обнаружение на некоторых изображениях завершилось неудачно, откроется диалоговое окно, в котором будет указано, для каких изображений обнаружение не удалось, и что их нельзя использовать. Если все изображения не пройдены, проверьте правильность введенного количества квадратов. Как только обнаружение угла будет завершено, курсоры будут добавлены к изображению, отображаемому в левой части окна. Вы можете панорамировать и масштабировать, чтобы проверять позиции курсора, используя обычные элементы управления мышью изображения, и просматривать различные изображения, используя кнопки << и >> над изображением. Наконец, выберите, использовать ли модель прямолинейной линзы или модель линзы типа «рыбий глаз». Чтобы завершить загрузку изображений и использовать их для определения внутренних ограничений камеры, нажмите «Применить».
Если автоматическое обнаружение на некоторых изображениях завершилось неудачно, откроется диалоговое окно, в котором будет указано, для каких изображений обнаружение не удалось, и что их нельзя использовать. Если все изображения не пройдены, проверьте правильность введенного количества квадратов. Как только обнаружение угла будет завершено, курсоры будут добавлены к изображению, отображаемому в левой части окна. Вы можете панорамировать и масштабировать, чтобы проверять позиции курсора, используя обычные элементы управления мышью изображения, и просматривать различные изображения, используя кнопки << и >> над изображением. Наконец, выберите, использовать ли модель прямолинейной линзы или модель линзы типа «рыбий глаз». Чтобы завершить загрузку изображений и использовать их для определения внутренних ограничений камеры, нажмите «Применить». В этом случае предполагается, что центр перспективы находится в центре изображения, а эффективное фокусное расстояние является единственным свободным параметром. Чтобы использовать модель камеры-обскуры, выберите «Использовать идеальную модель камеры-обскуры». Фокусное расстояние задается в поле Фокусное расстояние. Если физический размер пикселя камеры не введен, это фокусное расстояние указывается в пикселях. Если на вкладке Изображение с камеры введен физический размер в пикселях, фокусное расстояние вводится в миллиметрах.
В этом случае предполагается, что центр перспективы находится в центре изображения, а эффективное фокусное расстояние является единственным свободным параметром. Чтобы использовать модель камеры-обскуры, выберите «Использовать идеальную модель камеры-обскуры». Фокусное расстояние задается в поле Фокусное расстояние. Если физический размер пикселя камеры не введен, это фокусное расстояние указывается в пикселях. Если на вкладке Изображение с камеры введен физический размер в пикселях, фокусное расстояние вводится в миллиметрах. В поле «Позиционирование камеры» отображается список видов, определенных в модели САПР, и щелчок по одному из них немедленно установит положение и ориентацию камеры в соответствии с этим видом. Поле зрения из предустановленного вида не будет установлено, так как оно определяется внутренними параметрами камеры, которые задаются отдельно. Чтобы использовать внешние данные из существующей калибровки Calcam, нажмите кнопку «Загрузить…» под списком просмотра, чтобы выбрать файл калибровки для загрузки. Это установит внешние параметры камеры в соответствии с загруженной калибровкой и добавит эту калибровку в поле просмотра списка, чтобы к ней можно было легко вернуться.
В поле «Позиционирование камеры» отображается список видов, определенных в модели САПР, и щелчок по одному из них немедленно установит положение и ориентацию камеры в соответствии с этим видом. Поле зрения из предустановленного вида не будет установлено, так как оно определяется внутренними параметрами камеры, которые задаются отдельно. Чтобы использовать внешние данные из существующей калибровки Calcam, нажмите кнопку «Загрузить…» под списком просмотра, чтобы выбрать файл калибровки для загрузки. Это установит внешние параметры камеры в соответствии с загруженной калибровкой и добавит эту калибровку в поле просмотра списка, чтобы к ней можно было легко вернуться.