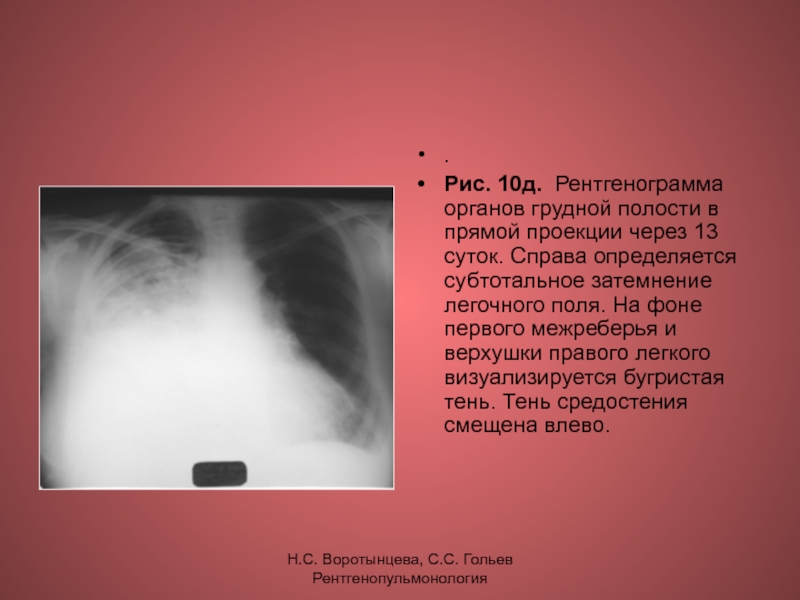
Фокусная тень: Фокусная тень — Вопрос фтизиатру
Фокусная тень — Вопрос фтизиатру
Если вы не нашли нужной информации среди ответов на этот вопрос, или же ваша проблема немного отличается от представленной, попробуйте задать дополнительный вопрос врачу на этой же странице, если он будет по теме основного вопроса. Вы также можете задать новый вопрос, и через некоторое время наши врачи на него ответят. Это бесплатно. Также можете поискать нужную информацию в похожих вопросах на этой странице или через страницу поиска по сайту. Мы будем очень благодарны, если Вы порекомендуете нас своим друзьям в социальных сетях.Медпортал 03online.com осуществляет медконсультации в режиме переписки с врачами на сайте. Здесь вы получаете ответы от реальных практикующих специалистов в своей области. В настоящий момент на сайте можно получить консультацию по 73 направлениям: специалиста COVID-19, аллерголога, анестезиолога-реаниматолога, венеролога, гастроэнтеролога, гематолога, генетика, гепатолога, гериатра, гинеколога, гинеколога-эндокринолога, гомеопата, дерматолога, детского гастроэнтеролога, детского гинеколога, детского дерматолога, детского инфекциониста, детского кардиолога, детского лора, детского невролога, детского нефролога, детского офтальмолога, детского психолога, детского пульмонолога, детского ревматолога, детского уролога, детского хирурга, детского эндокринолога, дефектолога, диетолога, иммунолога, инфекциониста, кардиолога, клинического психолога, косметолога, липидолога, логопеда, лора, маммолога, медицинского юриста, нарколога, невропатолога, нейрохирурга, неонатолога, нефролога, нутрициолога, онколога, онкоуролога, ортопеда-травматолога, офтальмолога, паразитолога, педиатра, пластического хирурга, подолога, проктолога, психиатра, психолога, пульмонолога, ревматолога, рентгенолога, репродуктолога, сексолога-андролога, стоматолога, трихолога, уролога, фармацевта, физиотерапевта, фитотерапевта, флеболога, фтизиатра, хирурга, эндокринолога.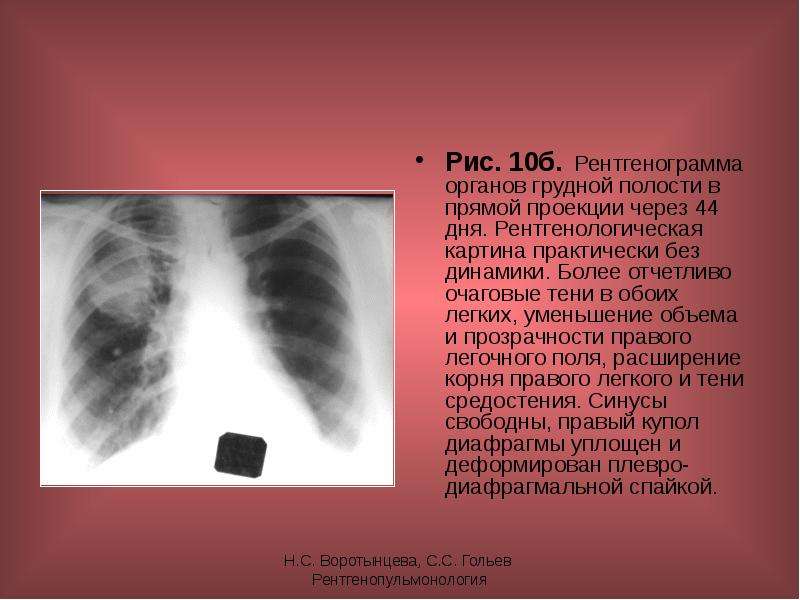
Мы отвечаем на 97.52% вопросов.
Оставайтесь с нами и будьте здоровы!
Что показывает рентген легких и бронхов
Рентгенография – широко известный метод диагностики, используемый с целью оценки состояния внутренних органов и костной системы. В этой статье мы рассмотрим, что показывает рентген легких и бронхов, что можно увидеть на снимках, как проходит процедура и когда назначается.
Рентген легких у взрослых может показать практически все серьезные патологии на ранней стадии. Диагностика выявляет следующие заболевания: эмфизему, пневмонию, плеврит, раковые опухоли и другие новообразования, бронхит, спайки в лёгких, туберкулез, отек легких, саркоидоз, абсцесс легкого, фиброз лёгких. На рентгене видно тень и просветление, так как снимок является негативом пленки. Тень указывает на уплотненные области легких, а белые пятна указывают на скопление воздуха или жидкости. Для получения полной картины процедуру проводят в двух или трех проекциях (прямая, косая, боковая).
Покажет ли рентген воспаление легких, бронхит и насколько целесообразен при пневмонии?
В первую очередь рентгенография легких назначают именно при подозрении на пневмонию, онкологию или туберкулез. Многие приравнивают воспаление легких к бронхиту и считают, что при данном заболевании также показан рентген. На самом деле сканирующие лучи не отображают непосредственно бронхи. Диагностировать бронхит по снимку невозможно, но можно предположить этот диагноз по косвенным признакам. Например, по присутствию отёка легкого, изменению его формы, деформации ткани, расположению просветов.
Рентген показал затемнение в легких что это может означать?
Тень в лёгком может указывать как на опасные лёгочные болезни, так и на бракованную пленку. Не стоит впадать в панику, ведь рентгенография является дополнительной диагностикой и по одному снимку никогда не ставят диагноз.
Также важно учитывать местоположение, которое может быть лёгочным или внелёгочным. Любые новообразования, будь то опухоль, киста или абсцесс также дают тень. Уплотнение ткани в легких означает воспалительный процесс. Затемнения вне лёгких могут означать наличие жидкости, аневризму аорты, увеличение лимфоузлов, возможно опухоли позвоночника, пищевода и другие патологии органов грудной клетки.
Для правильного описания снимка необходимо знание всевозможных форм заболеваний и большой практический опыт. Для уточнения диагноза необходимо провести другие обследования и осмотр пациента.
Пневмосклероз на рентгене — что это значит для тех, у кого в заключении описан этот диагноз. К сожалению, данное заболевание необратимо и требует пожизненного наблюдения у врача. Такая патология выражается в том, что легочная ткань деформируется и утрачивает способность наполнять альвеолы воздухом, а значит в них не происходит газообмен. Основной причиной болезни является длительное влияние инфекции в организме. На ранней стадии заболевание протекает без выраженных симптомов, но на флюорографии пневмосклероз будет прекрасно виден и обнаружен. При наличии подозрительных симптомов следует обратиться к врачу, не дожидаясь ежегодной диспансеризации.
Показания для прохождения диагностики: длительный кашель, одышка, присутствующая независимо от физической нагрузки, присутствие крови или гноя в мокроте, болевые ощущения при вдохе или выдохе, боли в грудной клетке без видимых причин.
Если вас беспокоит какая-то проблема со здоровьем, запишитесь на диагностику.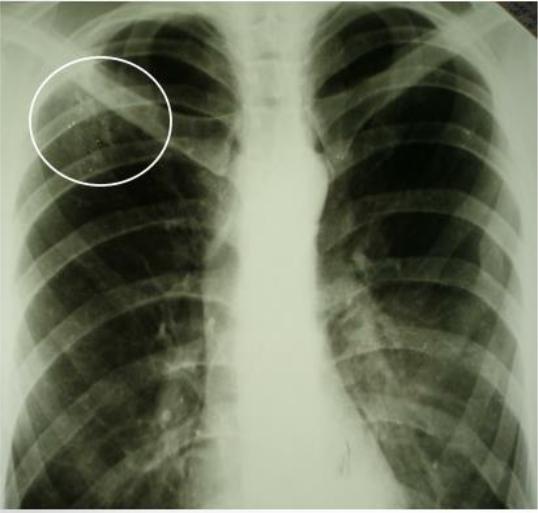 Успех лечения зависит от правильно поставленного диагноза.
Успех лечения зависит от правильно поставленного диагноза.
Как проводится процедура?
Как делают рентген легких знают все, кто хоть раз проходил флюорографию. Процедура проводится абсолютно таким же способом. Пациент освобождает верхнюю половину тела от украшений и одежды, плотно прижимается грудью или спиной к аппарату и задерживает дыхание на момент снимка. Процедура занимает не более пяти минут и не доставляет дискомфорта. Рентгенолог приступает к описанию сразу же и отдает результат на руки больному. Далее снимок можно показать своему лечащему врачу или любым другим специалистам при необходимости.
Сколько раз в год можно делать рентгенографию зависит от преследуемых целей обследования. Обычно рекомендуется проходить данную диагностику не чаща двух раз в год. Можно ли часто делать и насколько вреден рентген легких зависит от нескольких факторов. Необходимо учитывать возраст пациента, уровень излучения рентген аппаратом и самое главное, показания для проведения обследования.
Подготовка к исследованию
Подготовки не требуется, но вопросы можно ли курить перед рентгеном и можно ли есть перед рентгеном остаются актуальны для многих людей. Курение никак не изменит результат обследования, а вот кушать не стоит слишком обильно, так как при полном желудке диафрагма немного смещается вверх, следовательно, результат на снимке может быть искажен.
В чем разница КТ и рентгена легких?
Кроме рентгенографии исследование легких делается на компьютерном томографе. При выборе метода диагностики возникают вопросы что лучше КТ или рентген легких? Принцип исследования остается прежней, просвечивание органов рентгеновскими лучами, но рентген дает снимок в одной плоскости, а КТ позволяет получить трехмерное изображение. Что точнее рентген или КТ лёгких? Компьютерная томография дает возможность изучить органы грудной клетки более детально. Преимуществом томографии является информативность, недостатком – высокая доза облучения. Целесообразность в каждом случае определяет врач, учитывая индивидуальные обстоятельства и показания. Делать рентген легких в профилактических целях рекомендуется один раз в год. Людям входящих в группу риска рекомендовано проходить обследование дважды в год. К такой категории относятся сотрудники медицинских учреждений, люди, имеющие в анамнезе хронические заболевания такие как гепатит, ВИЧ, астма и те, кто контактирует с больными туберкулёзом.
При выборе метода диагностики возникают вопросы что лучше КТ или рентген легких? Принцип исследования остается прежней, просвечивание органов рентгеновскими лучами, но рентген дает снимок в одной плоскости, а КТ позволяет получить трехмерное изображение. Что точнее рентген или КТ лёгких? Компьютерная томография дает возможность изучить органы грудной клетки более детально. Преимуществом томографии является информативность, недостатком – высокая доза облучения. Целесообразность в каждом случае определяет врач, учитывая индивидуальные обстоятельства и показания. Делать рентген легких в профилактических целях рекомендуется один раз в год. Людям входящих в группу риска рекомендовано проходить обследование дважды в год. К такой категории относятся сотрудники медицинских учреждений, люди, имеющие в анамнезе хронические заболевания такие как гепатит, ВИЧ, астма и те, кто контактирует с больными туберкулёзом.
Данная статья размещена исключительно в познавательных целях, не заменяет приема у врача и не может быть использована для самодиагностики.
11 февраля 2019
Камеры, освещение и точки обзора в After Effects
Перед перемещением камеры выберите любой вид, кроме вида «Активная камера». При использовании вида «Активная камера» просмотр осуществляется через камеру, что затрудняет управление ей.
По умолчанию каркас камеры будет отображаться только при выборе камеры. Для постоянного отображения каркаса камеры настройте параметры просмотра для панели «Композиция» («Вид» > «Параметры просмотра»). (См. раздел Отображение или скрытие элементов управления слоя на панели «Композиция».)
При работе со слоем камеры или света создайте слой нулевого объекта и привяжите свойство «Точка обзора» камеры или света со свойством «Положение» нулевого слоя, используя выражение. После этого можно анимировать свойство «Точка обзора» путем перемещения нулевого объекта. Зачастую проще выбрать и просмотреть нулевой объект, чем выбрать и просмотреть точку обзора.
В After Effects существует команда камеры «Создать пустую орбиту». Она создает родительскую связь между выбранным слоем камеры и новым пустым слоем. Новый пустой слой переименовывается на основе имени камеры с добавлением Orbit Null
Она создает родительскую связь между выбранным слоем камеры и новым пустым слоем. Новый пустой слой переименовывается на основе имени камеры с добавлением Orbit Null
Триш и Крис Мейер (Trish и Chris Meyer) рассказывают о команде «Создать пустую орбиту» в этом видеоруководстве на Adobe TV.
Видеоруководство по созданию и изменению камеры, а также использованию инструментов камеры можно найти на веб-сайте Adobe.
Триш и Крис Мейер (Trish и Chris Meyer) разработали руководство по использованию 3D-слоев, света и камер, которое доступно в формате PDF в виде выдержки из книги After Effects Apprentice на веб-сайте Focal Press.
Марк Кристиансен (Mark Christiansen) предлагает свои советы и подробные инструкции по работе с камерами в главе «Виртуальная кинематография в After Effects» из книги After Effects Studio Techniques на веб-сайте Peachpit Press. Эта глава включает сведения о соответствующих искажениях объектива, выполнении перемещений камеры, выполнении проекций камеры (сопоставление камеры) с помощью изменения фокусировки в ходе съемки, создания размытия, использования зернистости и выбора соответствующей частоты кадров.
Рич Янг (Rich Young) предлагает в своем блоге на веб-сайте AE Portal набор выражений, который использует метод toWorld, чтобы связать камеру и освещение со слоем с эффектом сферы CC.
Эндрю Дэвис (Andrew Devis) предлагает на сайте Creative COW 3 руководства по применению анимации к камерам.
Вертолеты на Марсе жужжат и не отбрасывают тень / Хабр
Добро пожаловать в наше уютное конспирологическое логово. Сегодня мы будем рассматривать тени на фотографиях с Марса, округлять числа и писать отвратительный код.
Автор (справа) и предмет исследования (слева)В этом выпуске: астрономические наблюдения теней в пустыне, аугментация ушей, заглядывание за левый край видео, гадание по фотографиям и особенности работы GSCMOS матриц семилетней давности.
Лифт (предположительно работает):
Вертолеты на Марсе
1.1 Оценка расстояния до Марса
1.2 Ошибки?Вертолеты жужжат
2. 1 Blade Passage Frequency
1 Blade Passage Frequency
2.2 Эффект Доплера
2.3 Оцениваем скорость вертолета
2.4 …расстояние до марсохода
2.5 …точки взлета и посадки
2.6 …дальность полета
2.7 …план полета
2.8 Симуляция эффекта Доплера и сравнение
2.9 Ошибки?
2.10 Всякое
2.11 Оффтоп 1: Пассивный Доплер-радар
2.12 Оффтоп 2: Марсианская аэродинамикаВертолеты не отбрасывают тень
3.1 Оценка характеристик камеры и оптики
3.2 Почему лопасти прозрачные?
3.3 …они прозрачные в ИК?
3.4 Оффтоп 3: ИК-фотография для бедных
3.5 …они путешествуют во времени?
3.6 Оценка эффективности затвора
3.7 Откуда на фото градиент яркости?
3.8 Передний край
3.9 Ground truth
3.10 Симуляция глобального затвораПостскриптум
Ссылкография
 1 Blade Passage Frequency
1 Blade Passage Frequency 1. Вертолеты на Марсе
Маленький вертолет летает на Марсе, но где летает Марс? Насколько он дальше от Солнца чем Земля? Насколько меньше света достается камерам и солнечной батарейке?
У меня нет фотографии солнечной батарейки, чтобы по ней гадать, зато есть фотография тени от солнечной батарейки:
https://mars.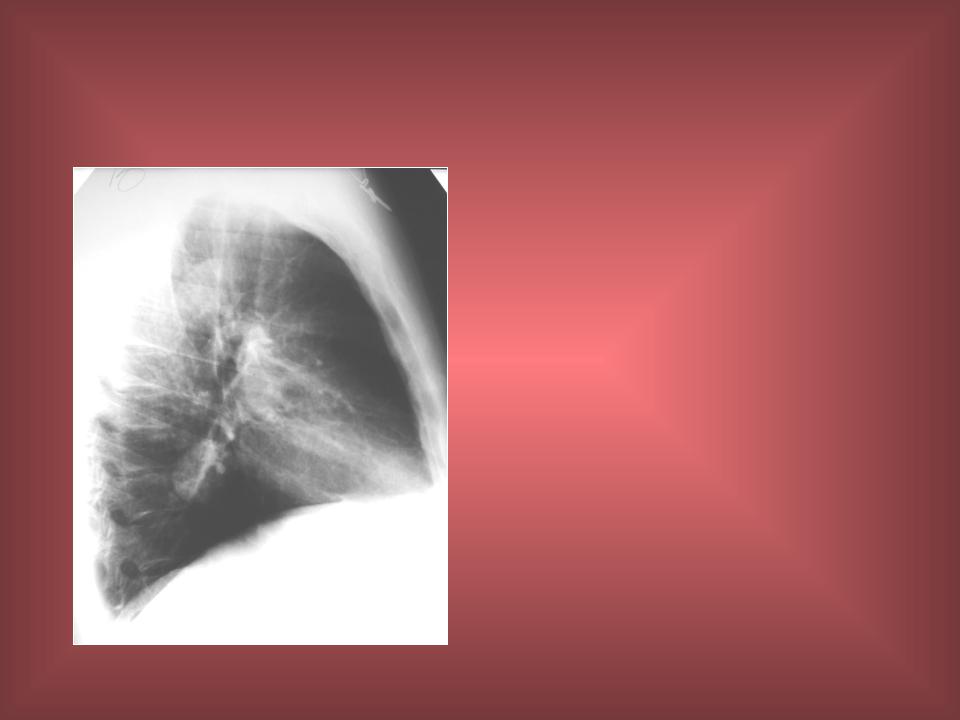 nasa.gov/mars2020/multimedia/raw-images/HSF_0048_0671201703_000ECM_N0000001HELI00000_000085J
nasa.gov/mars2020/multimedia/raw-images/HSF_0048_0671201703_000ECM_N0000001HELI00000_000085JТень должна быть шириной с саму батарейку (165мм), ведь лучи от солнца параллельны. Можно взять ширину тени на фото и пересчитать пиксели в миллиметры.
2086 пикселей = 165мм. 0.079мм/пиксель.
Зачем нам это, и почему где-то в середине тени, а не по её верхней границе? Потому что перспектива заваливает размеры, а именно на этой линии слева нет особо крупных камней.
Как раз там, где тень переходит в свет.
Солнце, хоть и находится очень далеко, имеет заметный угловой размер на небе и границы теней от него не идеально резкие. Хуже того, ширина полутени (L) очень просто зависит от расстояния до предмета отбрасывающего тень (h), и углового размера Солнца (a)
Вооружившись этим знанием, а так-же тем, что высота Ingenuity составляет 49см, а солнечная батарея находится на самой его макушке, мы можем прикинуть, насколько далеко находится Марс.
Для начала измерим полутень.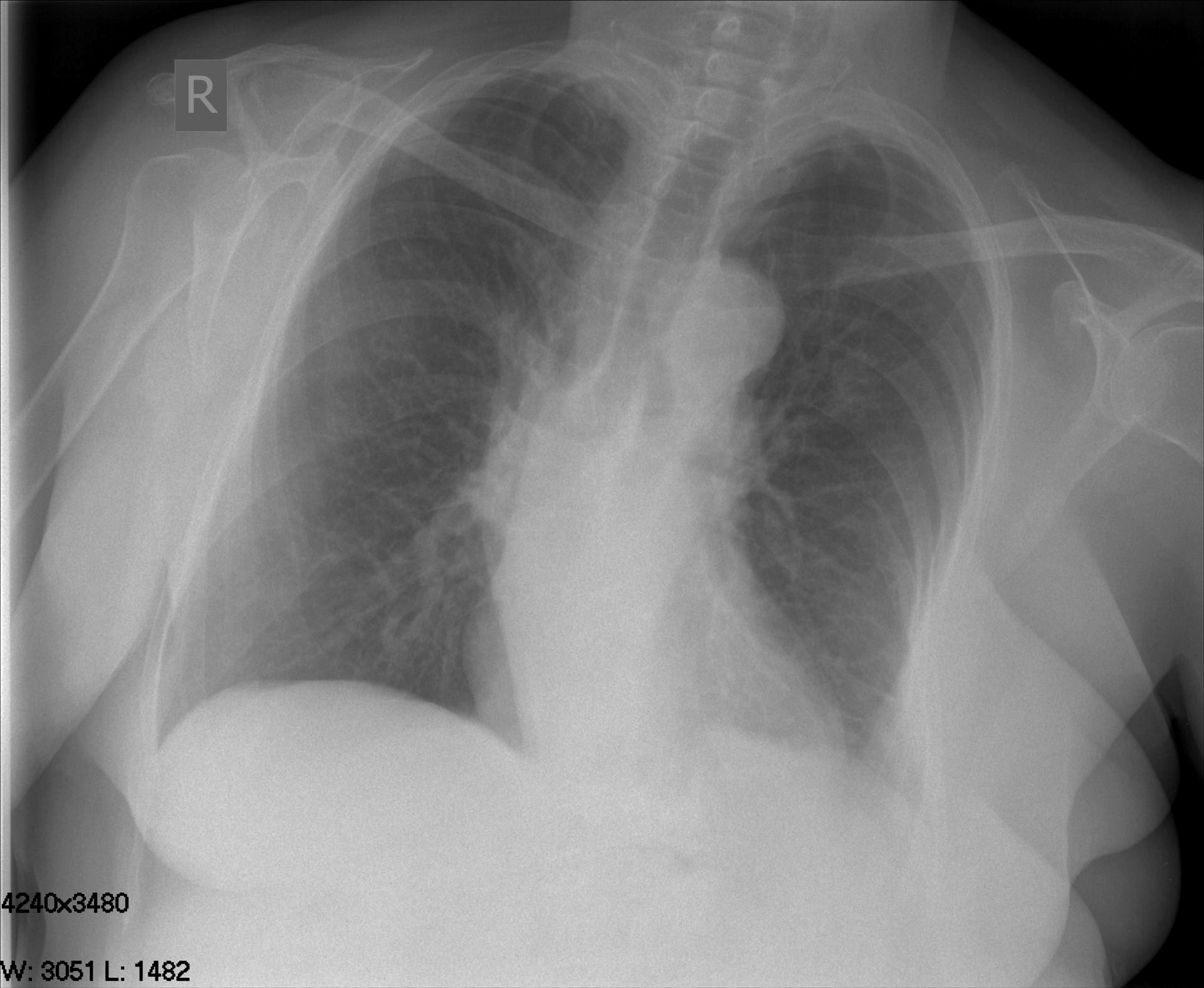 Песок и камни мешают это сделать вручную, но их можно усреднить. Повернем фотографию так, чтобы граница тени была строго вертикальна, берем кусок без камней, и сохраняем.
Песок и камни мешают это сделать вручную, но их можно усреднить. Повернем фотографию так, чтобы граница тени была строго вертикальна, берем кусок без камней, и сохраняем.
Дальше надо преобразовать картинку в Ч/Б, усреднить все строки и построить график яркости от координаты X. 10 строчек на питоне:
import sys
import numpy as np
from PIL import Image
import matplotlib.pyplot as plt
im = Image.open(sys.argv[1]).convert('L')
im.resize((im.size[0],1), Image.ANTIALIAS)
plt.plot(np.arange(im.size[0]), np.array(im).mean(axis=0))
plt.show()Яркость начинает падать примерно на x=43 и перестает на x=80. Ширина полутени получается 37 пикселей, или ~3мм.
Теперь, проведем такой-же эксперимент на Земле. Тень от предмета на расстоянии 49см:
Рядом нарисован один стандартный нарисованный сантиметр
Ширина полутени получилась 4.56мм. Делим одно на другое и узнаем, насколько Марс дальше от Солнца, чем Земля: 4.56/3 = 1.52. А значит света на Марсе в 1. 2 ≈ 2.3 раза меньше (без учета особенностей атмосфер обоих планет).
2 ≈ 2.3 раза меньше (без учета особенностей атмосфер обоих планет).
Теперь, расстояние от Солнца до Марса: отношение полутени к высоте солнечной батареи 3/490 = 0.00612. Диаметр солнца 1.3927 миллионов километров, значит расстояние 1.3927/0.00612 = 227.5 миллионов километров.
1.2 Ошибки?
На самом деле расстояние от Марса до Солнца меняется от 249.2 до 206.7 миллионов км в течении года. А в день когда было сделано фото (9 апреля 2021), оно составляло 242.8 (подсмотрено в Stellarium). А соотношение расстояний Марс/Земля было не 1.52, а 1.623. Ошибка в 6.3%, неплохо для разминки.
Ошибка в 1px при измерения полутени от Ingenuity даст погрешность в 1/37 ≈ 3%, а ошибка в 1см в высоте батарейки над тенью (земля под вертолетом не идеально ровная) — погрешность в 2%. Я так-же не исправлял искажения объектива и перспективу, наивно надеясь, что если всё достаточно хорошо центрировать, то ошибки друг друга скомпенсируют. Дуракам, очевидно, везет.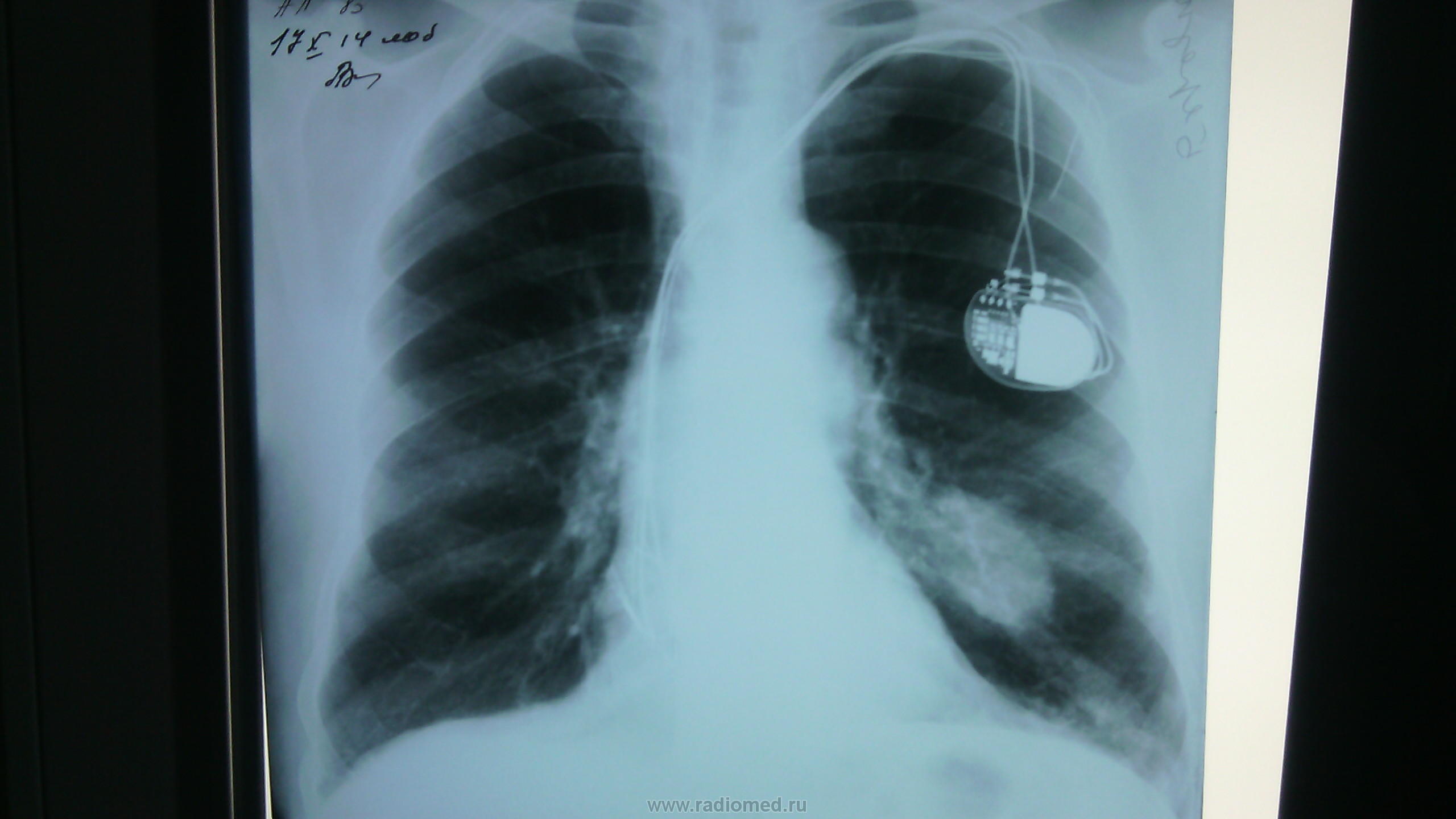
С количеством света интереснее. У Марса почти нет атмосферы, а вот у Земли есть. И она поглощает заметную часть энергии приходящей от Солнца. Из 1350 Вт/м2, которые получает Земля от Солнца, до поверхности долетает только 1040. А до поверхности Марса ~530 Вт/м2 из 586. Разница в 1.9 раза, а не в 2.3.
2. Вертолеты жужжат
Вертолет, летающий на Марсе, работает на солнечной батарейке, 18650 аккумуляторах, процессоре от смартфона и камерах от Raspberry Pi. Ну разве не потрясающе? Смотрите, как летает:
И на видео даже слышно жужжание винтов! Perseverance, снимающий видео, смотрит на пропеллеры сборку (т.е. находится примерно в плоскости вращения), а значит в спектре звука должна быть очень заметна Blade Passage Frequency. Этот компонент зависит от скорости вращения винта и количества лопастей, а его главная гармоника:
Где n — количество лопастей пропеллера, RPM — обороты в минуту.
Можно собрать пропеллер и проверить как должна выглядеть BPF.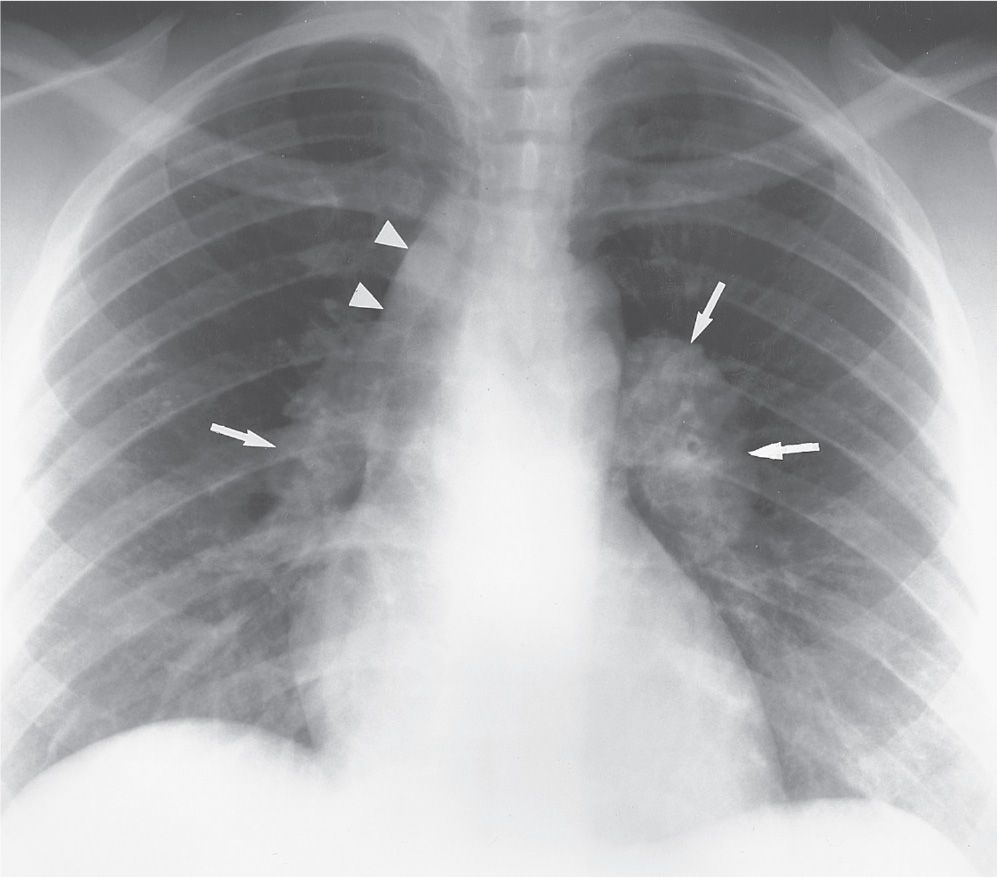 Хватаем моторчик от мелкого квадрика и винт от него же. За неимением референсного тахометра, собираем его из спичек и желудей: светодиод воткнутый в микрофонный вход компа и фонарик.
Хватаем моторчик от мелкого квадрика и винт от него же. За неимением референсного тахометра, собираем его из спичек и желудей: светодиод воткнутый в микрофонный вход компа и фонарик.
Для получения спектра берем первое попавшееся по запросу «microphone FFT online»
Для таких подозрительных вещей как светодиод на микрофонном входе, хорошо брать не просто FFT но и осциллограмму (в нижней части скриншота)Тени от лопастей проходят мимо светодиода каждые 2.94ms, перекрывая поток света от фонарика, что вызывает изменение фотоэлектрического тока, и уровня сигнала на микрофонном входе. За каждый оборот мимо датчика проходят обе лопасти, так что период вращения винта получается 6ms. А обороты — 10’000 RPM.
Вооружившись этим знанием, берем приложение-спектроанализатор и смотрим на спектр пропеллера:
Не обращайте внимания на красную линию, она показывает максимумы и я забыл её отключить
337Гц — та-самая BPF, и разные её гармоники. Убедившись, что всё сходится, посмотрим на BPF вертолета.
Качаем видео, пихаем его в ffmpeg:
ffmpeg -i ./6015_20210507_HelicopterFliesOnMars-1280.m4v \
-lavfi showspectrumpic=s=3000x3000:fscale=log spectrogram.jpgКартинка получается возмутительно большой, но зато разрешение по частоте и времени позволяет всё разглядеть.
BPF на 84HzВидно, что пик находится примерно на 84Гц.
Но у ведь Ingenuity не простой винт, а два соосных. Это 2 лопасти или 4?
Не совсем очевидно, но 2. Можно представить себе два пропеллера вращающиеся с одинаковой (иначе вертолет закрутит) скоростью: оба будут шуметь на одной частоте. И как их шум не складывай, ничего кроме громкости меняться не будет.
А можно собрать модель соосного пропеллера из двух обычных и проверить:
Моторы соединены вместе, но повернуты лицом друг к другу, так что винты вращаются в противоположные стороны. Но лопасти на винтах закручены по-разному, поэтому поток направлен в одну и ту же сторону. RPM (измеренный всё тем же светодиодом) получился примерно 6000 у каждого.
А спектры шума выглядят вот так:
В плоскости вращения
Пик на ~200Гц как раз соответствует BPF1 для двухлопастного винта на 6000RPM. Обратите внимание что пик двойной — обороты у винтов всё-же немного различаются, и BPF тоже.
А если слушать винты сверху, BPF1 уже не так заметна:
Над винтами (не под потоком воздуха)В видео гораздо меньше гармоник BPF. Потому, что звук отфильтровали, заглушив всё лишнее. Но если присмотреться, на спектрограмме видны остатки высших гармоник:
BPF1 на ~84Гц, а значит пропеллеры вращаются примерно на 60*(84/2) = 2520RPM.
Фраза «You can also hear the sound change as the helicopter leaves the area and then returns. That’s called the Doppler effect» которая появляется в видео, меня очень расстроила, потому что я никакого Доплера не слышал. Придется прибегнуть к помощи Машины.
2.2 Эффект Доплера
Вытащим звук из видео в WAV и скормим его numpy. Тон BPF самый громкий (спасибо неизвестному звукорежиссеру из JPL), поэтому мы можем просто выбирать самый высокий пик на FFT и, двигаясь по файлу скользящим окном, построить график его частоты по времени.
Важно выбрать достаточно большое окно, чтобы получить хорошее разрешение по частоте. Если мы хотим (а мы хотим!) разрешение в 0.1Гц, окно должно быть 1/0.1 = 10 секунд.
Почему 10?Представьте что у вас есть запись длительностью 1 сек, в которой только одна частота. Пусть будет 10Гц. Вы можете посчитать сколько периодов помещается в 1 секунду — 10 штук.
Если частота будет 11Гц, вы насчитаете 11 периодов. Но вот если она будет 10.5Гц, вы уже не сможете уверенно сказать количество. У FFT такие-же проблемы.
Разрешение по частоте определяется как Fs/N где Fs это частота дискретизации, а N количество семплов в выборке. Или, если выборка задана в секундах, как 1/T.
Мой слух аугментирован!Максимальный сдвиг частоты от центра ~1Гц, или 1.2% от 84Гц. Гугл сообщает что человек различает на слух разницу частот в 0.5%. Ну и пусть различает, а мы посмотрим график:
Сразу после взлета вертолет неподвижен. При этом BPF звучит на 84.36Гц, что уточняет обороты до 2531 RPM.
Примерно на 32 секунде BPF начинает увеличиваться. А на видео в это же время вертолет начинает разгон. Задержки между видео и звуком не видно, что при скорости звука в 250м/c дает расстояние до вертолета не более 250 метров.
Сильно зависит от времени суток из-за больших перепадов температуры. Она меняется от 216 (при -95°С) до 270 (+5°С) м/c. Вот тут рассказывают как её измерять, стреляя лазером в камни и слушая задержку. Кстати, тем же самым микрофоном, через который мы слушаем вертолет. 250 м/c я взял практически по-памяти и это отлично совпало со скоростью при текущей погоде. -27°C дают 247м/c.
Раз мы знаем скорость звука, сдвиг частоты можно пересчитать в скорость. Наблюдатель неподвижен, поэтому:
Где v скорость вертолета (вдоль луча зрения), vs скорость звука, f частота для нулевой скорости (84.36Гц), fo — наблюдаемая частота.
При разрешении по частоте в 0.1Гц, разрешение по скорости выходит ~0.3м/c. Неплохо.
Видно, что график симметричный относительно центра, значит вертолет летал примерно одинаково туда и обратно. В центре есть 3 секунды, когда скорость была нулевой: на взлет и посадку нужно больше, значит он просто потупил в дальней точке и полетел домой.
Относительная скорость в начале отрицательная (он приближается!), а на 44 сек резко переходит через 0 и продолжает расти. Вертолет летел по прямой, поэтому путь должен пролегать примерно так
2.3 С какой скоростью он летал?
На 42й секунде видно, как Ingenuity завершает разгон и возвращается в вертикальное положение. Эффект Доплера дает нам лучевую скорость ~1м/c в этот момент. Скорость в проекции можно оценить взяв два кадра из видео с разницей в пару секунд:
347/2 = 173 пикселя за секунду. Высота от дна корпуса до верхушки вертолета ~36 см, а на картинке ~17.5 пикселей: скорость в проекции 173*(0.36/17.5) = 3.56 м/c.
А полная скорость из этих двух компонентов: 3. 7 м/c.
7 м/c.
2.4 Можем ли мы уточнить расстояние от ровера до вертолета?
Возьмем два фрейма в начале полета: тот на котором Ingenuity еще не начал разгон, и тот на котором он уже почти вылетел из кадра.
Можно измерить размер вертолета на обоих фреймах (лучше всего измерять высоту от дна корпуса до верхушки) и узнать, что он увеличился примерно с 16.5 до 17.5 пикселей, или на 6%.
Между фреймами прошло 10 секунд, в течении которых вертолет разгонялся, и его максимальная скорость вдоль луча зрения составила ~1м/c. При равномерном ускорении это дает (1/2)*10 = 5 метров на которые вертолет приблизился к камере.
За 5 метров угловой размер вертолета вырос на 6%. Что дает нам 5/0.06 = 83 метра дистанции на момент старта.
Но этот метод очень грубый: Если бы размер изменился не на 1 пиксель, а на 2, дистанция получилась бы 43 метра. Да и лучевая скорость у нас с разрешением 0.3м/c.
Попробуем прикинуть расстояние еще одним способом. Можно сделать очень смелое предположение, что вертолет летает какой-нибудь из сторон ланчбокса вперед, и посмотреть как он ориентирован в начале полета.
Можно сделать очень смелое предположение, что вертолет летает какой-нибудь из сторон ланчбокса вперед, и посмотреть как он ориентирован в начале полета.
3D модельку можно покрутить тут
Выглядит как 22.5°.
А значит,
Разгон начинается в 32 секунды, а в 44 секунды скорость на графике переходит через 0 — в этот момент он летит перпендикулярно лучу зрения. 10 секунд ускорения и 2 секунды полета на 3.7м/с дают 26 метров от начала полета до ближайшей к камере точки. Отсюда,
Правда наверняка где-то между, поэтому возьмем среднее от 83 и 68 — 75 метров.
Кстати, можно представить поле зрения камеры: за время пролета вертолета через весь кадр, направление изменилось на 22. 5°. Горизонтальный FOV в 24° дает 55мм объектив кроп-факторе 1.5. То есть буквально как китовый 18-55 на камере с APS-C выкрученный на самый большой зум.
5°. Горизонтальный FOV в 24° дает 55мм объектив кроп-факторе 1.5. То есть буквально как китовый 18-55 на камере с APS-C выкрученный на самый большой зум.
2.5 Места взлета и посадки отличаются
Сравним два кадра:
Картинка увеличена в 10 раз, смещение на 85.5 и 5.5 пикселя. Место посадки было правее и ближе, чем место взлета.
Высота вертолета от дна ланчбокса до верхушки — 36см и 16 пикселей на фото, значит он сместился на 85.5*(36/16) = 186 сантиметров вправо в проекции.
5.5 пикселя вниз, дают 12см в проекции. Предположим, что поверхность ровная и плоская, и что высота мачты с камерой на ровере 2 метра. Тогда, смещение по поверхности вдоль луча зрения 0.12*(75/2) = 4.5 метра.
Что дает:
2.6 Как далеко летал Ingenuity?
Мы знаем, что места взлета и посадки различались, поэтому считаем по-отдельности:
По графику видно, что он начал движение в 32сек, а закончил в 79: 47 секунд полета, из которых 20 на разгон и торможение: 273. 6+203.6/2 = 134,7 метра для первой части маршрута.
6+203.6/2 = 134,7 метра для первой части маршрута.
Обратный путь начался на 82 и закончился на 129 секундах, что тоже дает 47 секунд.
Значит, видимое смещение точки посадки вправо вызвано просто углом траектории относительно луча зрения (а может быть, скорости были разными для двух участков пути):
Действительно, arctan(1.86/4.5) ~ 22.5°. А угол a очень мал, потому что длина пути гораздо больше расстояния между точками.
Суммарная дальность полета получилась 269.4 метра.
2.7 Теперь можно нарисовать план полета
Мы знаем все нужные расстояния и углы:
2.8 Симуляция жужжания
Перед тем как сравнивать всё это безобразие с реальными данными, маленькое отступление. Спектрограмма выглядит страшно, на ней видны порывы ветра, которые почти заглушают гудение мотора. Разрешение в 0.3м/c и окно в 10 секунд не внушают доверия. Можем ли мы вообще говорить о точности в 1 секунду, когда окно такое большое?
Давайте набросаем симулятор жужжащего вертолета. Отсюда можно взять относительные координаты ровера, и точек в которых садился вертолет:
Отсюда можно взять относительные координаты ровера, и точек в которых садился вертолет:
Смотрим координаты на скриншоте и измеряем полоску с масштабом:
meters_per_pixel = 50/167
rover = np.array([740, 274])*meters_per_pixel
heli_p1 = np.array([501,209])*meters_per_pixel
heli_p2 = np.array([573, 653])*meters_per_pixel
heli_p3 = np.array([520, 210])*meters_per_pixelДобавим разные параметры по-вкусу:
dt = 0.1
hover_time_at_liftoff = 10
hover_time_at_p2 = 3
hover_time_at_landing = 10
accel_time = 10
max_speed = 3.7
center_freq = 84.36
speed_of_sound = 250И составим план полета:
hover(hover_time_at_liftoff) # Hovering at p1
set_target(heli_p2)
accelerate(max_speed, accel_time) # Accelerating at p1
free_flight(accel_time) # Flying to p2
decelerate(0, accel_time) # Decelerating at p2
hover(hover_time_at_p2) # Hovering at p2
set_target(heli_p3) # Going home
accelerate(max_speed, accel_time) # Accelerating at p2
free_flight(accel_time) # Flying to p3
decelerate(0, accel_time) # Decelerating at p3
hover(hover_time_at_landing) # Hovering at p3Каждая из функций апдейтит положение вертолета и, с шагом dt заполняет массив значениями BPF с учетом скорости.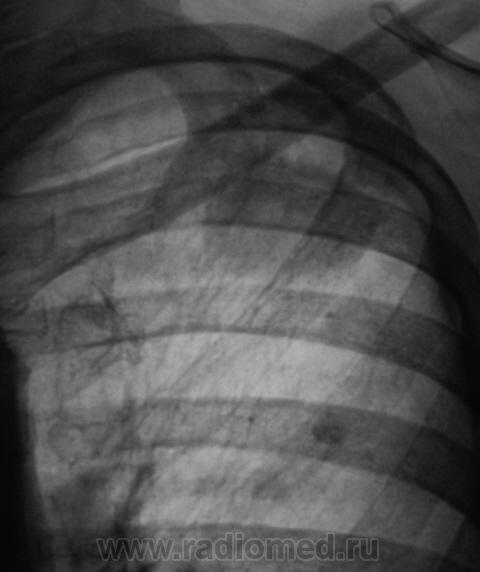
hover(t) не меняет скорость и завершается через t секунд
set_target(p) меняет вектор направления вертолета, чтобы он двигался к p
accelerate(s, t) увеличивает скорость до s в течение t секунд
free_flight(t) сохраняет текущую скорость и завершается, когда время до цели будет < t
decelerate(t) — как accelerate только с другим знаком и s = 0.
Получилась вот такая красота:
Выглядит точь-в-точь как график, полученный из видео. Амплитуды и тайминги похожи. Чуть ниже будет картинка с наложением одного на другое, а пока можно поиграться с симулятором и посмотреть, что изменится при разных параметрах полета.
Допустим, дальняя точка была расположена на том же удалении, но так, что вертолет улетает под углом 10° (а не 22.5°) к проекции камеры:
heli_p2 = np.array([457, 653, 5])*meters_per_pixelСкорость приближения в начале и конце полета гораздо ниже, а сдвиг частоты всего 0.05Гц. Мы бы даже не заметили этого на графике.
Теперь сложнее. Пусть вертолет, после того как вылетит из кадра, поворачивает немного в сторону, а потом тем же путем возвращается обратно:
Синие линии — старый путь, зеленые — новый.Получатся так:
Видно момент, когда из-за смены направления резко меняется относительная скорость. Я сделал поворот моментальным, в реальности переход был бы более гладким, но с такой-же амплитудой. Не уверен что его было бы видно на нашем графике, но более резкий поворот точно будет заметен.
2.9 Ошибки?
1) Реальное значение RPM было 2537 а не 2531. Ошибка около 0.2% или 0.2Гц для BPF. Вполне близко к пределу точности измерений.
3) Скорость полета, по данным в википедии, 3.5м/c, а не 3.7м/c. Ошибка в 6%. Неплохо, учитывая то, как мы её измеряли.
Можно наложить график симуляции на реальные данные и сравнить:
Видно что симуляция (со скоростью 3.7м/с) немного спешит.
Еще стоит заметить, что в симуляции я не учел задержку звука.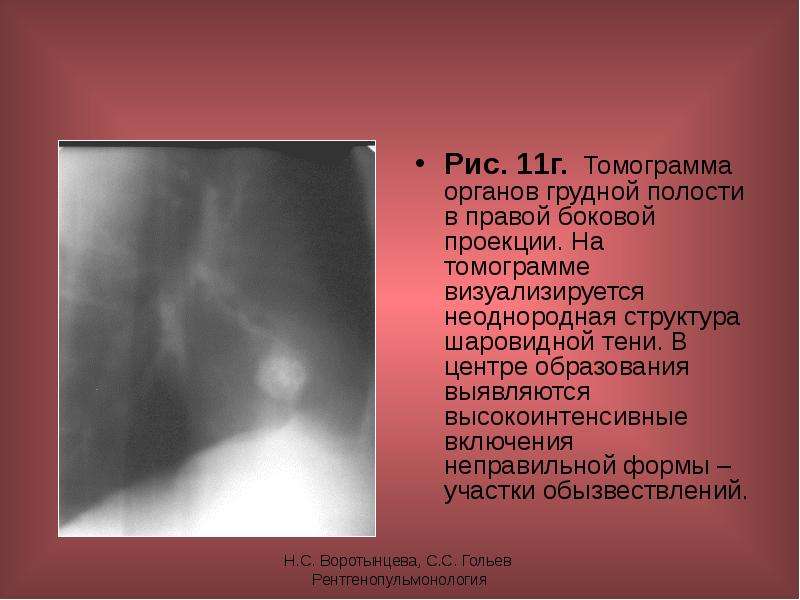 Но она составляла всего полсекунды в дальней точке:
Но она составляла всего полсекунды в дальней точке:
Rover-Heli dist @ start: 74.2 meters, sound lag 0.30 sec
Rover-Heli dist max: 124.0 meters, sound lag 0.50 sec4) Расстояние от камеры до Ingenuity на старте, измеренное по карте, получилось 74 метра, а не 75. 1.3% и наглядное подтверждение того, что измерять вещи разными способами и усреднять полученное — полезно. Но вообще, скорее повезло.
6) Дальность полета, по данным из википедии, составляла 268.5 метров в обе стороны. У нас вышло 269.4 метра. Ошибка в 0.3%. На удивление, гораздо меньше ошибки в скорости. Видимо какие-то из предположений (одинаковое время разгона-торможения, равномерное ускорение, одинаковая длина путей) оказались ложными, но ошибки скомпенсировали друг-друга.
5,7) Можно наложить наш план полета на реальную карту:
Я выбрал в качестве опорной точки положение марсохода, а в качестве опорного направления — линию между ним и точкой старта.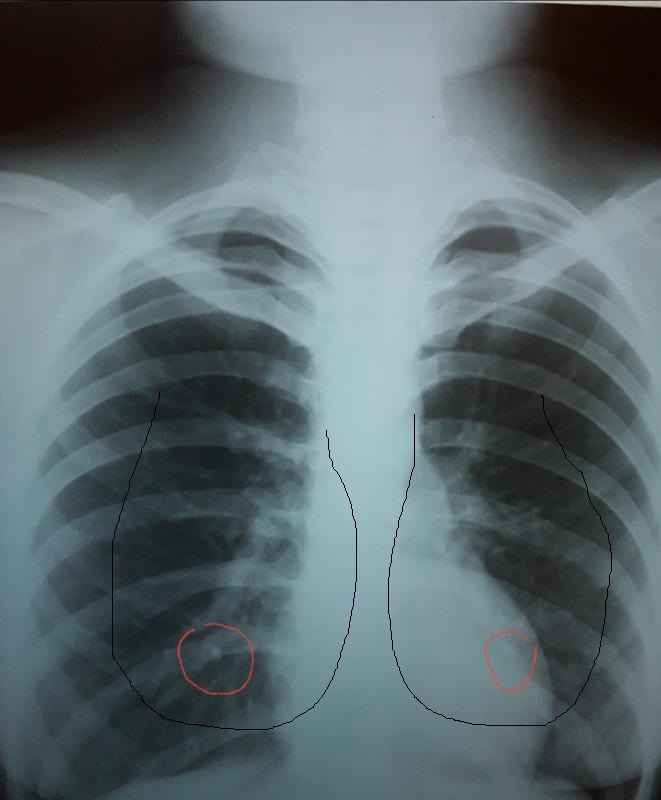 Совпало хорошо. Чуть-чуть ошиблись в точке посадки, и на пару градусов по направлению. В обоих случаях мы разглядывали 2,5 пикселя, так что ошибки можно понять.
Совпало хорошо. Чуть-чуть ошиблись в точке посадки, и на пару градусов по направлению. В обоих случаях мы разглядывали 2,5 пикселя, так что ошибки можно понять.
2.10 Всякое
Последняя интересная вещь в видео — посадка вертолета. Коснувшись земли, он немного подпрыгивает и окончательно приземляется на 136 секунде. А на спектрограмме из ffmpeg виден момент когда винт начинает резко сбрасывать обороты:
Разница между приземлением и отключением пропеллера 3 секунды. Ingenuity, коснувшись песка, медленно и осторожно уменьшает угол атаки винтов, постепенно увеличивая нагрузку на грунт. И только когда убедится, что опора надежная — выключает моторы. А в эти 3 секунды он готов взлететь и повторить попытку, если датчики заметят что-то неладное.
А вот видео, где вся движуха собрана на один экран:
Вертолеты на Марсе действительно жужжат, и жужжат занимательно.
2.11 Оффтоп 1: Пассивный Доплер-радар
Вернемся к симулятору жужжания:
meters_per_pixel=1. 0
rover = np.array([0, 0, 0])*meters_per_pixel
heli_p1 = np.array([5000.0, 200, 200])*meters_per_pixel
heli_p2 = np.array([-3000.0, 200, 200])*meters_per_pixel
. . .
set_target(heli_p2)
accelerate(200, 1)
free_flight(1) 0
rover = np.array([0, 0, 0])*meters_per_pixel
heli_p1 = np.array([5000.0, 200, 200])*meters_per_pixel
heli_p2 = np.array([-3000.0, 200, 200])*meters_per_pixel
. . .
set_target(heli_p2)
accelerate(200, 1)
free_flight(1)
0
rover = np.array([0, 0, 0])*meters_per_pixel
heli_p1 = np.array([5000.0, 200, 200])*meters_per_pixel
heli_p2 = np.array([-3000.0, 200, 200])*meters_per_pixel
. . .
set_target(heli_p2)
accelerate(200, 1)
free_flight(1)Тут вертолет быстро разгоняется до 200 метров в секунду, и пролетает мимо ровера:
Скажем, мы хотим по этой записи найти скорость вертолета, но не знаем даже BPF для нулевой скорости.
Но лучевая скорость становится нулевой в тот момент, когда он пролетает ближайшую точку. И ее можно найти, если принять, что скорости до и после пролета были одинаковыми, но с разным знаком:
Действительно, если взять f1 = 417Гц, а f2 = 45Гц (я взял точки в противоположных концах графика), получается 81.2 Гц. Ошибка в 2.5%, но это не так важно, потому что:
v1 = 250*(81.2/417-1) = -201.3 m/s
v2 = 250*(81.2/45-1) = 201.11 m/s
В тех точках где я измерял частоты, вертолет находился достаточно далеко (порядка 3км), так что я пренебрег поправкой на направление. Но если вам интересно, на 3км угол к лучу зрения получается 5.5°, а cos(5.5°) = 0.995. Погоды не делает.
Но если вам интересно, на 3км угол к лучу зрения получается 5.5°, а cos(5.5°) = 0.995. Погоды не делает.
Ошибка получилась меньше 0.5%. Круто? Попробуем в деле:
Возьмем видео с самым красивым самолетом. 20и-метровый кусок металла с аэродинамикой шлакоблока и радарной сигнатурой маленькой птички, не падающий с неба только благодаря хитрой управляющей электронике. Да, я про F-117:
Можем ли мы измерить его скорость?
Посмотрим на спектрограмму:
Кривая перехода сразу бросается в глаза. Возьмем две частоты и посчитаем:
Частота для нулевой скорости получилась 422Гц.
А скорость вдоль луча зрения в начале видео:
350*(422/898 — 1) = -185.5 м/c
Но летел он не прямо на камеру, а под углом градусов в 15. Так что реальная скорость:
-185.5/cos(15) = —192м/c
Какая была на самом деле? К сожалению видео об этом умалчивает, поэтому возьмем два соседних фрейма, где самолет летит на фоне гор, совместим и измерим:
F-117 в длину 20. 1 метр. Но это до края хвостового оперения. А до заднего края корпуса — 17.1 метр. Скорость получается 43*(17.1/110)*30 ≈ 200 м/с. Мы ошиблись на 4%. Наверняка из-за кривой оценки угла, или скорости по фреймам.
1 метр. Но это до края хвостового оперения. А до заднего края корпуса — 17.1 метр. Скорость получается 43*(17.1/110)*30 ≈ 200 м/с. Мы ошиблись на 4%. Наверняка из-за кривой оценки угла, или скорости по фреймам.
2.12 Оффтоп 2: Марсианская аэродинамика
Как известно, у летательного аппарата два врага: сила тяжести и сопротивление атмосферы. Мне было интересно оценить, насколько на вертолет влияет второе (может ему и правда надо летать углом вперед?).
Где Fd сила сопротивления атмосферы, p — плотность, v — скорость вертолета, A — площадь сечения, а k — аэродинамический коэффициент.
Плотность атмосферы на Марсе около 0.02 kg/m3
Скорость 3.5м/c
k считать сложно, скажем, вертолет имеет форму куба (k = 1).
Осталось узнать площадь сечения. Это просто. Открываем 3д модельку и крутим ее до тех пор пока не будет похоже на на вертолет летящий прямо на нас:
Закрашиваем тень, потому что она темнее чем коробка вертолета, и двигаем белый маркер на гистограмме влево, чтобы он стал левее пика светлого фона:
Теперь гистограмма показывает количество пикселей темнее фона.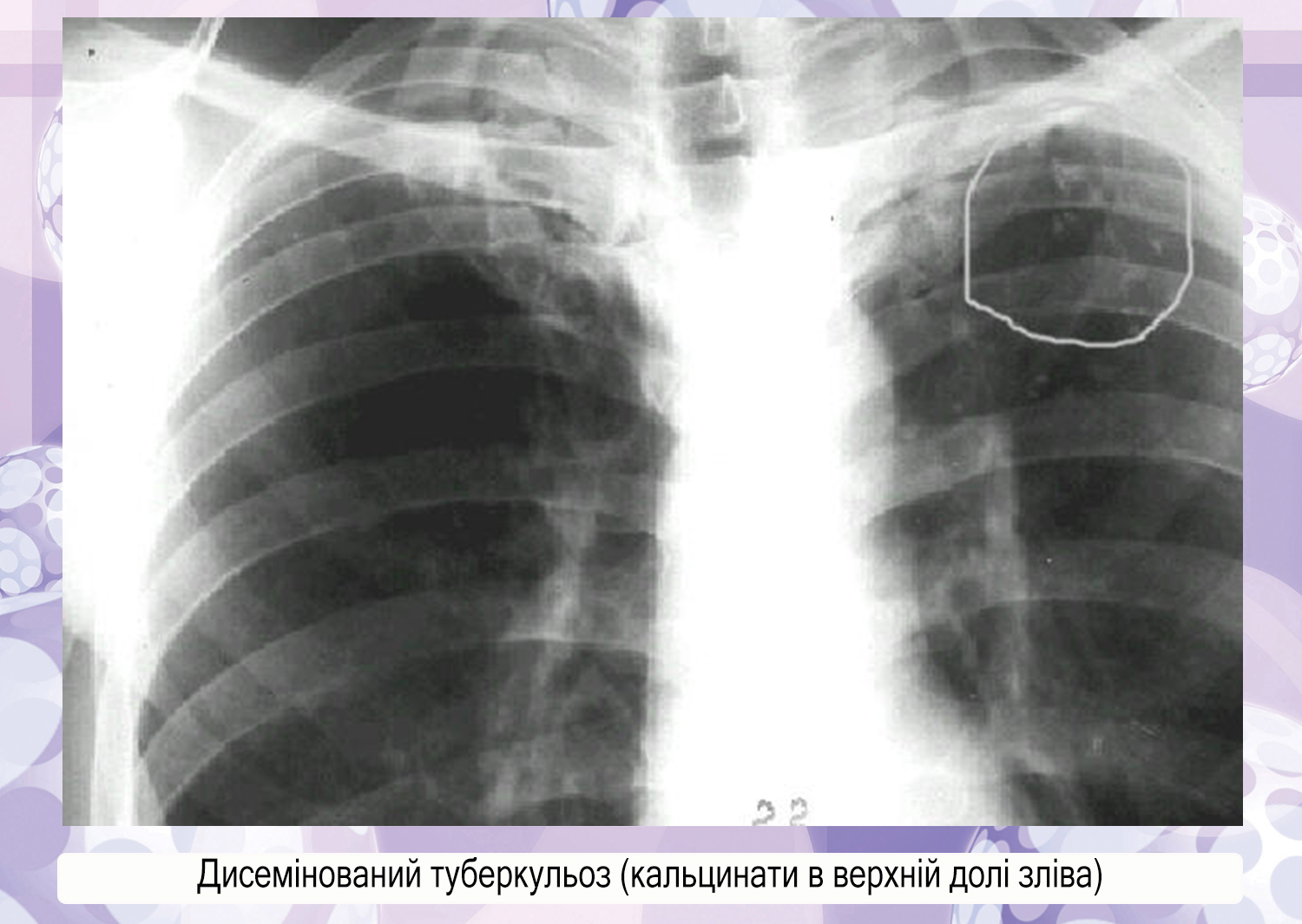 20.5*0.1)/2 = 0.01225 Ньютона
20.5*0.1)/2 = 0.01225 Ньютона
F = m*a
0.01225 = 1.8*a
a = 0.007м/с2
То-есть, за 27 секунд полета вертолет теряет всего 0.2 м/c скорости.
3. Вертолеты не отбрасывают тени
Вернемся к заглавной картинке (наконец-то!)
https://mars.nasa.gov/mars2020/multimedia/raw-images/HNM_0064_0672622254_092ECM_N0030001HELI02888_0000A0JЧетыре вещи на ней выглядят подозрительно:
Вертолет явно в воздухе, значит лопасти вращаются на 2500 RPM, а выглядят они очень четкими. Какая же там должна быть выдержка, диафрагма и ISO чтобы получить такую картинку с хорошей экспозицией и не утонуть в шумах и красивом бокэ?
Лопасти кажутся полупрозрачными. Странности добавляет и тень от ноги поверх тени пропеллера, которая прозрачной не выглядит.
Сверху лопасти более темные, чем снизу.
На переднем (более прямом) крае лопасти тень выглядит темнее. Причем на некоторых фото это заметно, а на других — нет:
Что за камера помогает Ingenuity ориентироваться на местности? Это OV7251. 640х480, отсутствие фильтра Байера, глобальный электронный затвор и до 120FPS в максимальном разрешении. Размер матрицы 1/7.5″, а размер пикселя 3х3мкм. Эта камера бывает в двух исполнениях — для видимого света (с hotmirror, который отсекает ИК излучение), и для ближнего ИК (с полосовым фильтром на 830нм).
640х480, отсутствие фильтра Байера, глобальный электронный затвор и до 120FPS в максимальном разрешении. Размер матрицы 1/7.5″, а размер пикселя 3х3мкм. Эта камера бывает в двух исполнениях — для видимого света (с hotmirror, который отсекает ИК излучение), и для ближнего ИК (с полосовым фильтром на 830нм).
Надо заметить, что мне так и не удалось найти (или понять по фото) какая из двух версий камеры используется на Марсе. Далее я буду предполагать что обычная.
3.1 Гадание по фотографии
Попробуем оценить выдержку. Ищем какое-нибудь прямое место на лопасти и измеряем ширину полутени. Заодно, измеряем и ширину полутени от солнечной батарейки.
Пересечение синих линий — моя скромная попытка найти ось вращения15 пикселей для винта и 10 пикселей для батарейки. Значит винт смазался вращением на 5 пикселей, что на таком расстоянии от оси вращения дает 1.5°. Но мы не учли искажения оптики: вещи на поверхности, ближе к краю кадра выглядят меньше, чем на самом деле. Пусть будет угол в ~2°, или 1/180 от полной окружности.![]() Полную окружность лопасть проходит за 60000/2500RPM = 24мс, а 1/180 за 133мкс. Это и есть длительность выдержки. Ну или 1/7500, если вы фотограф.
Полную окружность лопасть проходит за 60000/2500RPM = 24мс, а 1/180 за 133мкс. Это и есть длительность выдержки. Ну или 1/7500, если вы фотограф.
Ошибка на 0.5° при измерении угла, дает примерно 33мкс разницы. К примеру если бы угол был в 1.5°, выдержка получилась бы 100мкс или 1/10000.
Теперь ISO. Хоть светочувствительность по ISO-12232 и не используется в этих камерах, её хорошо знать для сравнения с обычными фотоаппаратами. Когда камеры были большими, а экспонометры отдельными и дорогими, люди пользовались правилом «Sunny 16» чтобы подбирать выдержку. Правило гласит:
On a sunny day set aperture to f/16 and shutter speed to the [reciprocal of the] ISO film speed for a subject in direct sunlight
Сделаем поправку на то, что Марс дальше от Солнца и на него попадает в 2 раза меньше света. Делим 16 на и получаем Mars 11 rule. С диафрагмой f/11 и выдержкой 1/7500 матрице нужна будет чувствительность ISO 7500 чтобы получить нормальную экспозицию. Звучит как высокое и шумное ISO, но подождите.
Звучит как высокое и шумное ISO, но подождите.
Размер пикселя слишком мал, чтобы позволить диафрагму f/11: дифракционный предел размажет картинку.
Где d — минимальный размер пятна, N — диафрагма, а λ — длина волны света.
При диафрагме f/11 и λ = 550нм, d получается ~15мкм, целых 5 пикселей (размер пикселя у OV7251 — 3мкм).
Но на кадрах с камеры можно разглядеть отдельные детали в пару пикселей размером, значит d не сильно больше размера пикселя. Пусть будет как-раз 3мкм. Тогда:
N = 2.23
Чтобы дифракция не влияла на картинку, диаметр диафрагмы нужно увеличить в 11/2.23 = 5 раз. Поток света увеличится в = 25 раз, и ISO нужно уменьшить до 7500/25 = ISO 300. Хорошее, низкое ISO. И совсем не шумное.
Но хватит ли, при такой большой диафрагме, глубины резкости, чтобы без автофокуса снимать объекты на расстоянии от 15 сантиметров (когда вертолет приземлился) до десятков метров? Мы можем прикинуть гиперфокальное расстояние. Это расстояние H от камеры до точки фокуса, при котором в поле резкости попадает всё от H/2 до бесконечности:
Где H — гиперфокальное расстояние, f — фокусное расстояние объектива, N — диафрагменное число, а c — диаметр круга нерезкости. 2/(2.23*0.003) = 95.6мм
2/(2.23*0.003) = 95.6мм
0.003 — это 3мкм, размер круга нерезкости
Если сфокусировать объектив на 95мм, то резким будет всё от 47мм до бесконечности. Так что глубины резкости хватит с запасом.
Можно поискать модули с этой матрицей чтобы убедиться, что мы не сильно ошиблись. Вот модуль с фокусным расстоянием 1.3мм (и углом зрения в 86°), диафрагмой f/2.2 и фиксированным фокусом от 65mm до бесконечности. В целом сходится.
1/7500″, ISO300, диафрагма f/2.2 и объектив с фокусным расстоянием 0.8mm. Странная конфигурация, если вы привыкли к большой фототехнике.
А если бы камера работала в ИК (λ = 850нм), то получилось бы: ISO120, диафрагма f/1.4 и гиперфокальное расстояние в 15 сантиметров.
3.2 Прозрачные лопасти
У этой части проблема с экспериментальными данными: проснувшись однажды утром после беспокойного сна, я обнаружил, что в доме нет ни одной камеры с глобальным электронным затвором, годной для переделки в ИК.
 Да и негодных нет. В конце мы компенсируем недостаток реальности численным моделированием (отвратительный код на питоне, да).
Да и негодных нет. В конце мы компенсируем недостаток реальности численным моделированием (отвратительный код на питоне, да).3.3 Потому, что прозрачные.
Самый очевидный вариант, объясняющий полупрозрачность теней, который приводят в каждом втором обсуждении этих фотографий: лопасти выглядят прозрачными потому-что они прозрачные. Логично.
Ведь OV7251 может работать в диапазоне ближнего ИК, где вещи выглядят неожиданно. Знаменитые примеры:
Тёмное, почти черное, небо. И чем дальше в ИК — тем темнее.
Яркие листья на деревьях, благодаря эффекту Вуда (не от слова «wood», а от слова Robert Wood)
Прозрачность разных пластиков и красителей
Может быть и с лопастями так же? Лопасти у Ingenuity карбоновые, и это хорошо: у меня есть такие-же. В этот раз не придется даже думать, хватаем пропеллер и смотрим на тень от солнца:
Рядом для сравнения светофильтр, прозрачный в ИК, hotmirror непрозрачный в ИК* но прозрачный в видимом свете и кусок дискеты. А снизу то же самое, но в видимом диапазоне.
А снизу то же самое, но в видимом диапазоне.
Светлое пятно под hotmirror не от того, что оно пропускает ИК, а от того, что отражает вниз свет который попадает на его нижнюю сторону с яркой бумаги. Смотрите, как оно отражает держалку с круглым фильтром. Потому и «mirror».
Тень от пропеллера совершенно такой же яркости, как тень от мотора рядом:
3.4 Оффтоп 3: Инфракрасная фотография для бедныхА вот тень от дискеты чуть прозрачнее тени от держалки:
Дискета пропускает очень небольшое количество ИК и красного света. Она сойдет за lowpass-фильтр, если вы хотите попробовать ИК фотографию, а покупать нормальный фильтр не хотите.
Вот пара фоток на дискету:
Откуда берутся цвета на инфракрасных фото? Посмотрите на спектральную чувствительность фильтра Байера:
В серой части (как раз там работает ИК фотография) разные каналы всё еще дают разные значения, а значит есть цветовой контраст. Но чем дальше в ИК, тем меньше их различия. Начиная с 850нм, все каналы практически одинаковы. И действительно, чем дальше граница среза у lowpass фильтра, тем меньше насыщенность картинки:
И действительно, чем дальше граница среза у lowpass фильтра, тем меньше насыщенность картинки:
Конечно, производителей не волнуют характеристики фильтра Байера в ИК, поэтому цвета заметно меняются от камеры к камере.
В общем, карбоновые пропеллеры не относятся к вещам, предательски изменчивым в ИК. Приятно знать.
Ну и чтобы окончательно развеять сомнения, можно посмотреть вот эту фотографию:
https://mars.nasa.gov/mars2020/multimedia/raw-images/HNM_0055_0671823877_115ECM_N0000001HELI00053_0000LUJЛопасти тут не вращаются и совершенно не прозрачны. А значит, дело в движении и таймингах.
3.5 Лопасти перемещаются во времени!
Помните эффект, возникающий при фотографировании со вспышкой чего-то шустрого? Рассмотрим фотографию комара:
Крылья получились четкими, но вокруг них смазанный след, потому что длительность вспышки гораздо меньше длительности выдержки. Но след полупрозрачный, потому что вспышка яркая и хорошо подсветила деревья.
Можно повторить то же самое с пропеллером:
Такой же эффект, как на фото Ingenuity! Но ведь у камеры вертолета нет вспышки, ему светит солнце.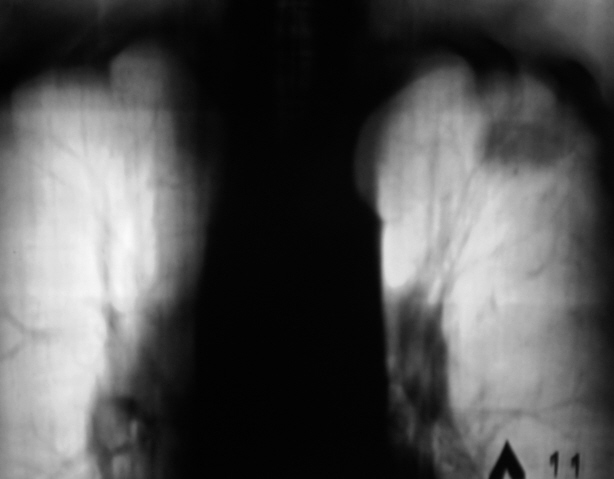 Откуда этот эффект получается у него?
Откуда этот эффект получается у него?
Ответ скрывается в устройстве самой матрицы:
Данные считываются с CMOS матрицы построчно. Контроллер выбирает одну из строк, и АЦП через мультиплексор по очереди измеряет заряд на пикселях. Затем следующую.
Процесс длится порядка миллисекунд, что сравнимо с длительностью выдержки или даже больше. Поэтому в классических цифровых фотокамерах, по завершении экспозиции матрица прикрывается от света механическим затвором.
А если механического затвора нет, можно экспонировать и считывать строки по отдельности. Тогда у вас не будет проблемы с тем, что другие строки ждут своей очереди под светом. Но будут другие проблемы: да, мы говорим о rolling shutter. Строки экспонируются в разное время, и объекты в кадре могут успеть переместиться.
Более сложной и дорогой альтернативой rolling shutter является global shutter. Тут вы экспонируете всю матрицу сразу, но по завершении экспозиции перемещаете накопленный пикселем заряд в защищенную от света область, называемую storage node.
Она маленькая, находится вне фокуса микролинзы и прикрыта от света линиями управляющих сигналов, а то и отдельной крышечкой из металлизации. Перемещение зарядов со всех пикселей происходит одновременно, и уже после этого вы неспешно считываете заряды. Как-будто у вас механический затвор.
Вот только он не механический и не 100% эффективный. Крышка на storage node не может быть значительно больше самой storage node, и свет может под неё проникать за счет дифракции на всякой фигне вокруг. А еще электроны, выбитые фотонами, попавшими мимо фотодиода, могут долететь до storage node.
Эта нежелательная засветка при «закрытом» затворе называется Parasitic Light Sensitivity (PLS) и ужасно всех бесит уже много лет.
Пиксели будут засвечиваться, пока идет чтение, причем те которые считываются последними — засветятся больше всех. А если между завершением экспозиции и началом чтения есть пауза, то пиксели будут засвечиваться и в это время, но равномерно.
PLS, в различных статьях, как и другие специфичные вещи, выражается в чем угодно в зависимости от давности статьи и фазы луны на момент написания: Сначала это называли Shutter Efficiency и измеряли в процентах.
Когда отличать 99.98% от 99.99% стало слишком тяжело, ввели термин PLS ratio. Например 1/10000 означает что закрытый затвор пропускает в 10000 раз меньше света чем открытый. Иногда указывают 1/PLS, чтобы не писать «1/».
Но так-как писать 4-5 нулей довольно утомительно, PLS выражается еще и в децибелах, например -40dB = 1/10000. Или 1/PLS, чтобы не писать у децибелов минус.
Я же пойду еще дальше и буду говорить PLS, имея ввиду 1/PLS.
 99% означает что закрытый затвор пропускает 1% света.
99% означает что закрытый затвор пропускает 1% света.3.6 Попробуем оценить PLS у нашей камеры
Сколько времени занимает считывание кадра с матрицы? В даташите этого не написано, но можно примерно прикинуть из таймингов камеры:
На странице 31 указан System Clock в 48MHz. А на 20й странице — тайминги MIPI.
Полное время передачи одного фрейма (1) занимает 478848 тактов SysClock, или 10мс (что как раз дает 100 FPS). Но из этого времени только 445056 тактов (9.3мс), занимает передача самого фрейма. Потому что тайминги (2), (3), (5), (7) и (9) — не относятся к передаче полезных данных.
Можно убедиться, поделив 445056 на 928 (период передачи одного пакета) и получив 480 — количество строк сенсора. Значит в каждом пакете одна строка. А то, что из 928 тактов больше половины — пауза между пакетами, говорит о том, что строки действительно оцифровываются по ходу передачи. Так что ~9.3мс это время чтения сенсора.
Выдержка была ~133мкс, а значит, время чтения в 70 раз больше выдержки.
Можно вернуться к веселым экспериментам. Возьмем две фотографии тени от пропеллера: неподвижного и размазанного вращением.
Скомбинируем их в режиме Addition (попиксельное сложение яркости) и сравним с фотографией, где вертолет летит высоко над землей. Лопасти находятся примерно в центре кадра, так что отношение чтение/выдержка будет ~35.
Скажем, что фото с неподвижным винтом это идеальный затвор. А фото с размазанным — эффект от PLS. Тогда, если бы PLS была ровно 35, то простое сложение кадров дало бы такой-же эффект как у вертолета (экспозиция размытого кадра в 35 раз дольше, но сенсор в это время в 35 раз менее чувствительный):
Похоже? Да, но слишком прозрачно. 1.66 = 3.17 раза. Значит, PLS примерно 35*3.17 ≈ 111.
1.66 = 3.17 раза. Значит, PLS примерно 35*3.17 ≈ 111.
Такое значение PLS кажется очень плохим по современным меркам. В работах 2018 и 2019 годов приводятся цифры на два порядка лучше для пикселей того же размера.
-40dB это 1/10000Даже в пресс-релизе 2019 года, где Omnivision анонсирует новую версию этой камеры — OV7251-1B, заявлена эффективность в 99.96% (PLS = 2500).
Но на всяческих видео и пресс-конференциях команда Ingenuity рассказывала, что работа над вертолетом велась 5-6 лет. В 2014 году вышел Snapdragon 801 который стоит в Ingenuity и моем телефоне, в 2014-же году вышла первая версия OV7251. И графики от 2013 показывают, что в те давние времена, PLS была довольно печальной:
Обратите внимание, что это график для пикселя размером 3.75мкм, а на OV7251 — 3мкм. И PLS очень стремительно ухудшается с уменьшением размера пикселя: примерно в 5 раз на 10% уменьшения размера. Между 3.75 и 3 — 20% разницы, что дает ухудшение в 10 раз и PLS порядка 100. Сходится.
Сходится.
3.7 Откуда на фото градиент яркости?
Потому, что разные строки ждут очереди на считывание разное время. Верхняя строка считывается первой, и PLS на неё не влияет: верхняя часть кадра самая темная. Нижняя строка считывается последней, а до этого засвечивается все 9.3мс. Средняя — в течении 4.65мс.
Попробуем получить PLS еще одним способом (с расстоянием до ровера ведь сработало!). Возьмем все фотографии c навигационной камеры и слепим из них одну:
convert -evaluate-sequence mean ./HELI_NAV/*.png ./heli_nav_mean.pngПолучилась вот такая красота:
Видно виньетирование от большой диафрагмы и широкого угла, ногу, пыль на стекле, еще ногу, и тень от вертолета по центру.
Теперь возьмем вертикальную полосу откуда-нибудь из центра кадра и построим график яркости:
В центральной части (где не мешают искажения оптики и тень от вертолета) график более-менее линейный.
За 80 пикселей (360..280) яркость изменилась со 158 до 180. Или на (180-158)/158 ≈ 14%. 80 пикселей это 1/6 от полной высоты картинки, а значит PLS = 70/6/0.14 ≈ 83.
Или на (180-158)/158 ≈ 14%. 80 пикселей это 1/6 от полной высоты картинки, а значит PLS = 70/6/0.14 ≈ 83.
Можно снова взять что-нибудь среднее между 83 и 111: PLS ≈ 100 (или 99% эффективности затвора)
В данном случае эффект от PLS был так заметен только потому, что у нас есть быстро вращающиеся лопасти. Без них эффект выражался бы только в вертикальном градиенте яркости, который легко правится программно (с потерей динамического диапазона, но это не страшно).
3.8 Передний край
С градиентом понятно, но почему передний край на лопасти темнее, чем остальная часть?
В эксперименте со сложением двух фотографий пропеллера, мы упустили важную деталь: там пропеллер вращался быстро и успевал сделать много оборотов за время экспозиции, потому размазывался в аккуратный диск. Но с Ingenuity всё не так: за 9.3мс чтения лопасть проходит 140°. И это за полное время считывания. Для средних строк это будет уже 70°.
А если пропеллер не успевает сделать даже пол-оборота, тень от второй лопасти не дойдет до места, где была первая в момент начала экспозиции. А значит, тень не размажет в ровный круг, и то место откуда начала двигаться лопасть, будет светлее.
А значит, тень не размажет в ровный круг, и то место откуда начала двигаться лопасть, будет светлее.
А то, что это заметно не на всех кадрах, объясняется вторым винтом: на 3 кадре угол между винтами около 22.5° и сектора, которые проходят лопасти за время засветки, полностью пересекаются, выравнивая яркость. А вот на двух первых кадрах угол >70° и винты не успевают долететь.
Это картинка из будущего, вы еще не знаете что у меня есть отвратительный симулятор PLS, а я знаю.3.9 Ground truth
Можно ли проверить все эти домыслы, кроме как разглядывая фотографии с Ingenuity?
Я уже говорил, что подходящих камер у меня 0. Да и купить такую сейчас будет сложно — за 6 лет характеристики улучшились на порядки. К счастью, у нас есть ютуб, на котором иногда попадаются хорошие видео. Вот сегодняшнее хорошее видео:
(в комментах можно понаблюдать, как я упорно ничего не понимаю)
Это точно такая же камера как на Ingenuity, снимающая быстро вращающийся пропеллер. Идеально!
Идеально!
И на видео отлично видно, что лопасти выглядят прозрачными. Гораздо более прозрачными, чем тени от вертолета, но тут и выдержка короче (77 а не 133), и сцена гораздо более контрастная.
3.10 Симуляция неэффективного затвора
Это всё еще не выглядит убедительно. Да, мы знаем что у глобального затвора есть засветка, и примерно представляем её величину для OV7251. Но хочется проверить.
Я набросал контуры винта и коробки с ногами, и нагуглил текстуру песочка.
Загружаем всё это безобразие в Pillow:
blade1 = Image.open("blade.png").convert("RGBA")
blade2 = blade1.transpose(Image.FLIP_TOP_BOTTOM)
box = Image.open("box.png").convert("RGBA")
background = Image.open("sand.jpg").convert("RGBA")
w,h = blade1.size
center = (w//2, h//2)
Trow = 19Trow здесь — время оцифровки одной строки изображения в микросекундах. Оно же — минимальное время экспозиции. Оно же — шаг времени для нашей симуляции.
Функция для экспонирования кадра за один Trow:
def single_exposure(cx, cy, scale, a1, a2, shadow_alpha, gain):
shape = blade1.rotate(a1, center=center)
t = blade2.rotate(a2, center=center)
shape.paste(t, (0,0), t)
shape.paste(box, (0,0), box)
if scale != 1:
shape = shape.resize((int(w*scale), int(h*scale)), Image.NEAREST)
data = np.array(shape)
r, g, b, a = data.T
black = (r == 0) & (g == 0) & (b == 0) & (a == 255)
data[..., :][black.T] = (0, 0, 0, shadow_alpha*255)
shape = Image.fromarray(data)
bg = background.copy()
bg.paste(shape, (int(w/2 - w*scale/2 + cx), int(h/2 - h*scale/2 + cy)), shape)
return np.array(bg.convert("L")) * gainТут я безуспешно пытаюсь совладать с Pillow, вращаю лопасти на углы a1 и a2, собираю лопасти и коробку вместе, масштабирую и перемещаю, делаю их немного прозрачными (чтобы тень не была совсем черной) и прилепляю на песочек. В конце умножаю всё на gain — коэффициент, который поможет нам в итоге получать нормальную экспозицию.
Как живой!
Теперь, функция, собирающая кадр. Мы можем разделить всё происходящее на три этапа:
Сама экспозиция: кадр с выдержкой длительностью exposure_us, за время которой лопасти успевают немного сдвинуться.
Ожидание перед считыванием. Теперь длительность hold_us, и учитывается PLS — кадр во много раз темнее.
Считывание кадра. Тут вещи становятся хитрыми. Первая строка проэкспонируется в течение 1 лишнего Trow, а потом прочитается. 480я строка — в течение 480 Trow, причем в это время положение лопастей будет заметно меняться. Так что для кадра в 480 строк нам придется наплодить 480 фреймов для того чтобы брать с них строки для симуляции PLS.
def construct_frame(exposure_us, RPM, PLS, a1, a2, readout_us=h*Trow,
shadow_alpha=0.6, gain=None, hold_us=0, cy=0, cx=0, scale=1):
degrees_per_trow = RPM/60E6*360*Trow
exposure_trows = exposure_us//Trow
hold_trows = hold_us//Trow
kReadout = readout_us/h/Trow
if gain==None:
gain = 1/(exposure_trows + hold_trows/PLS + (h/2)/PLS*kReadout) * gain_correction
sensor = np. zeros((w,h))
if exposure_us != 0:
print("Building Base image")
for i in progressbar(range(exposure_trows)):
sensor += single_exposure(cx, cy, scale, a1, a2, shadow_alpha, gain)
a1 += degrees_per_trow
a2 -= degrees_per_trow
if hold_trows != 0:
print("Building Hold image")
for i in progressbar(range(hold_trows)):
sensor += single_exposure(cx, cy, scale, a1, a2, shadow_alpha, gain) / PLS
a1 += degrees_per_trow
a2 -= degrees_per_trow
if readout_us != 0:
print("Applying PLS frames")
PLS_frames = []
for line in progressbar(range(h)):
PLS_frames.append(single_exposure(cx, cy, scale, a1 ,a2, shadow_alpha, gain) / PLS * kReadout)
for t in range(-1, -line-1, -1):
sensor[line,:] += PLS_frames[t][line,:]
a1 += degrees_per_trow * kReadout
a2 -= degrees_per_trow * kReadout
return Image.fromarray(np.uint8(np.clip(sensor, a_min=0, a_max=255)), 'L') zeros((w,h))
if exposure_us != 0:
print("Building Base image")
for i in progressbar(range(exposure_trows)):
sensor += single_exposure(cx, cy, scale, a1, a2, shadow_alpha, gain)
a1 += degrees_per_trow
a2 -= degrees_per_trow
if hold_trows != 0:
print("Building Hold image")
for i in progressbar(range(hold_trows)):
sensor += single_exposure(cx, cy, scale, a1, a2, shadow_alpha, gain) / PLS
a1 += degrees_per_trow
a2 -= degrees_per_trow
if readout_us != 0:
print("Applying PLS frames")
PLS_frames = []
for line in progressbar(range(h)):
PLS_frames.append(single_exposure(cx, cy, scale, a1 ,a2, shadow_alpha, gain) / PLS * kReadout)
for t in range(-1, -line-1, -1):
sensor[line,:] += PLS_frames[t][line,:]
a1 += degrees_per_trow * kReadout
a2 -= degrees_per_trow * kReadout
return Image.fromarray(np.uint8(np.clip(sensor, a_min=0, a_max=255)), 'L')
zeros((w,h))
if exposure_us != 0:
print("Building Base image")
for i in progressbar(range(exposure_trows)):
sensor += single_exposure(cx, cy, scale, a1, a2, shadow_alpha, gain)
a1 += degrees_per_trow
a2 -= degrees_per_trow
if hold_trows != 0:
print("Building Hold image")
for i in progressbar(range(hold_trows)):
sensor += single_exposure(cx, cy, scale, a1, a2, shadow_alpha, gain) / PLS
a1 += degrees_per_trow
a2 -= degrees_per_trow
if readout_us != 0:
print("Applying PLS frames")
PLS_frames = []
for line in progressbar(range(h)):
PLS_frames.append(single_exposure(cx, cy, scale, a1 ,a2, shadow_alpha, gain) / PLS * kReadout)
for t in range(-1, -line-1, -1):
sensor[line,:] += PLS_frames[t][line,:]
a1 += degrees_per_trow * kReadout
a2 -= degrees_per_trow * kReadout
return Image.fromarray(np.uint8(np.clip(sensor, a_min=0, a_max=255)), 'L')readout_us и, получаемый из него, kReadout нужны чтобы симулировать разную скорость считывания. А устанавливая exposure_us, readout_us или hold_us в 0 можно отключать соответствующие компоненты кадра.
А устанавливая exposure_us, readout_us или hold_us в 0 можно отключать соответствующие компоненты кадра.
sensor — массив в котором мы суммируем все экспозиции. Как и в реальности, каждая часть процесса просто насыпает заряд в его ячейки.
gain выбирается так, чтобы в середине кадра (h/2) экспозиция была нормальной.
Проверим, как этот ужас работает:
construct_frame(exposure_us=133, RPM=2537, PLS=100,
readout_us=9272, a1=-35, a2=90).save("test.png")Чтобы было удобнее перебирать разные параметры, я написал обертку, которой можно задавать варианты для каждого из них. Посмотрим, как размывает лопасти при разной выдержке (без учета PLS):
Выдержка меняется от 19 до 12000 микросекунд
Интересно, что размывает их не просто в диск, а с паттерном из 4х светлых полос, который отмечает места пересечения лопастей при вращении. В любой точке за время экспозиции пролетает 2 лопасти (в разные стороны), но в точках пересечения — они пролетают одновременно, перекрывая свет на в 2 раза меньшее время.
Вот этот эффект на нашем соосном пропеллере из спичек и желудей
Интересно, что паттерн поворачивается, когда скорости винтов не совпадают:
Теперь, посмотрим на эффект от PLS. Если взять PLS=100, то разное время чтения сенсора будет выглядеть вот так:
Время чтения сенсора меняется от 19 до 24000 миллисекунд
Видно, как при увеличении соотношения Чтение/Экспозиция, PLS всё больше влияет на картинку. Если присмотреться, то можно увидеть размазанный след от того, что за время чтения лопасти успели повернуться:
В верхней части они успели повернуться меньше, чем в нижней. Потому что нижние строки засвечивались дольше.
Скажем, что длительность чтения была 9.3мс и посмотрим, что будет если менять PLS:
На низких PLS градиент практически пересвечивает нижнюю часть кадра, а кроме прозрачных винтов заметны и следы от их движения за время чтения. На PLS порядка 100, градиент выравнивается до приличного уровня. Интересно, что даже на PLS 2500 можно разглядеть разницу в тенях между винтом и ногами.
Мы забыли про паузу между экспозицией и чтением. Скажем, что PLS=100, выдержка 133мкс, а чтение 9.3мс. Тогда:
Пауза при неизменной PLS и времени чтения, влияет на общую яркость, при этом уменьшая градиент.
А вот так выглядит отдельно эффект от PLS при разном времени чтения:
Я выбрал несколько кадров с вертолета и попробовал воспроизвести их.
Тут я перепутал фазу винтов, потому что я не очень умныйВиден градиент на краях винтов, которого не было на предыдущем фотоВыглядит похоже. Хотя симуляция кажется несколько темнее (PLS слишком большой?) и с менее заметными градиентами на передней части лопастей (выдержка должна быть по-меньше?). Но в целом это вполне убедительно доказывает, что параметры примерно верные.
4. Постскриптум
Вот так, с помощью спичек, желудей и школьного учебника геометрии, можно изучать космическую технику не вставая с дивана.
Если бы мне 10 лет назад сказали, что на Марсе будет летать вертолет на солнечной батарейке, а марсоход будет снимать его на видео со звуком, я бы не поверил по целому набору причин.
Но вот мы здесь. Ingenuity, который создавался как proof-of-concept и не был обременен излишней консервативностью при выборе оборудования, таскает камеру с самым большим разрешением из всех что были на поверхности Марса и кучу легкой и компактной industrial-grade электроники.
На вертолете нет научного оборудования, кроме камер. Но зато он может моментально слетать за пол-километра и пофоткать со всех сторон очередной очень интересный камень.
Каждый новый полет сложнее предыдущего, но если МиМи не решит сделать бочку, нас ждет еще много материала от маленького марсианского вертолета.
Нет, вы только послушайте какая энергия у человека!
5. Ссылкография
https://github.com/dcoder-mm/heli-shadow-supplementary
Скрипты, видео и всякое прочее из статьи.
https://github.com/dcoder-mm/HELI_NAV
https://github.com/dcoder-mm/HELI_RTE_JPEG
Архивы фотографий с камер Ingenuity. Я прикручу автообновление, если будет не лень.
Марс и вертолеты
Mars Helicopter Technology Demonstrator PDF от вертолета. Довольно подробное описание железа, конструкции и испытаний от главного инженера проекта.
Довольно подробное описание железа, конструкции и испытаний от главного инженера проекта.
https://mars.nasa.gov/mars2020/multimedia/raw-images/ Всем известный каталог фотографий с марсохода и вертолета (архивы выше — оттуда).
https://forum.nasaspaceflight.com/index.php?topic=53277.0 API для него
https://archives.esac.esa.int/psa Чуть менее известный каталог от Европейского Космического Агентства, содержащий не только фото но и данные с инструментов. Там можно посмотреть, как Philae закатился в яму на комете и помер 🙁
https://mars.nasa.gov/technology/helicopter/status/298/what-were-learning-about-ingenuitys-flight-control-and-aerodynamic-performance/ Статья про то как летает вертолет на Марсе. С графиками и интересными подробностями.
https://mars.nasa.gov/technology/helicopter/status/ Статус апдейты вертолета.
https://en.wikipedia.org/wiki/Ingenuity_(helicopter)#List_of_flights Внезапно, википедия. Там отличная сводная таблица полетов с параметрами и описаниями.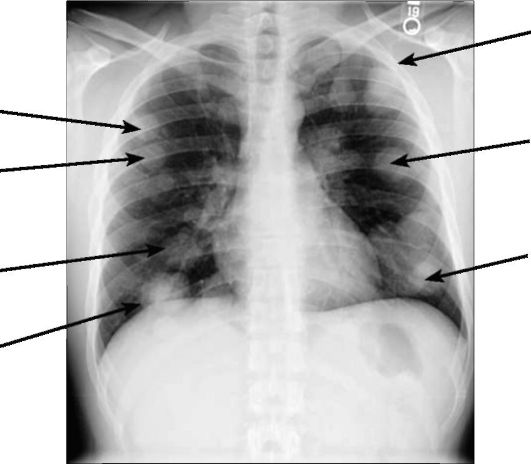
https://mars.nasa.gov/rss/api/?feed=weather&category=mars2020&feedtype=json А это json с актуальной погодой на Марсе. Понятия не имею зачем, но сам факт!
Камеры
Даташит на OV7750, потому что она почти такая-же как OV7251. https://cdn.datasheetspdf.com/pdf-down/O/V/7/OV7750-OmniVision.pdf
https://datasheet.octopart.com/OV09716-B77Y-OE-Z-Omnivision-Technologies-datasheet-138897320.pdf Бумажка от OV9716. Да, тоже не та камера. Зато тут много подробностей которые общие для всех этих камер от Omnivision.
https://sst.semiconductor-digest.com/2014/09/global-shutter-image-sensors/ Сравнение разных архитектур глобальных затворов
https://www.imagesensors.org/Past%20Workshops/2013%20Workshop/2013%20Papers/Slides/12-1_Velichko_SLIDES.pdf Тоже сравнение разных архитектур, но в виде слайдов с картинками (отсюда был утащен график для PLS 2013 года)
https://www.imaging.org/Site/PDFS/Conferences/ElectroincImaging/EI2018/EI2017-IMSE-CIS_pixel_design_optimization_Boyd_v2. pdf И еще одна аналогичная презентация, от Omnivision
pdf И еще одна аналогичная презентация, от Omnivision
https://www.researchgate.net/publication/223133651_CMOS_Image_Sensors_for_High_Speed_Applications Хорошая, хоть и старая (2009) статья про высокоскоростные CMOS матрицы и их проблемы.
Литературное чтение | — | |
Поэма | — | |
Пьеса | — | |
Рассказ | — | |
Роман | — | |
Роман в стихах | — | |
Руны | Эпические песни карелов и финнов, а также песни разных жанров у народов прибалтийско-финской языковой группы | |
Сказ | — | |
Сказка | — | |
Сонет | — | |
Стихотворение | Стихи, цикл стихов | |
Трагедия | — | |
Фельетон | — | |
Эпос | — | |
Эпиграмма | — | |
Эссе | — | |
другое | — | |
Передача/программа | — | |
Литературная | ||
Литературно-музыкальная | — | |
Музыкальная | — | |
Музыкально-литературная | — | |
Детская | — | |
Документальная | — | |
Радиокомпозиция | — | |
другое | — | |
Радиожурнал | — | |
Документальный | — | |
Литературный | — | |
Детский | — | |
другое | — | |
Спектакль | — | |
Театральный спектакль | — | |
Радиоспектакль | — | |
Радиопостановка | — | |
Радиопьеса | — | |
Спектакль | — | |
Радиокомпозиция спектакля | — | |
другое | — | |
Симфоническая музыка | Все сочинения для симфонического оркестра | |
Симфония | — | |
Симфония с хоровыми эпизодами | — | |
Симфоническая сюита | — | |
Симфоническая поэма | — | |
Симфоническая картина | — | |
Симфониетта | — | |
Симфонические танцы | — | |
Концерт для симфонического оркестра | — | |
Концертная увертюра | — | |
Увертюра-фантазия | — | |
Концерт для солирующих инструментов с симфоническим оркестром | — | |
Фантазия | — | |
Каприччио | — | |
Скерцо | — | |
Рапсодии | — | |
Концертино | — | |
Прелюдия | — | |
Вариации | — | |
Марш | — | |
Полонез | — | |
другое | — | |
Камерная музыка | Инструментальные произведения различного содержания и формы, предназначенные для сольного или ансамблевого исполнения. | |
Переложения для камерных составов | ||
Камерная музыка | Соната | — |
Сонатина | — | |
Ансамбли: | — | |
— | Дуэт | |
— | Трио | |
— | Квартет | |
— | Квинтет | |
— | Секстет | |
— | Септет | |
— | Октет | |
— | Нонет | |
— | другое | |
Инструментальные пьесы: | — | |
— | Прелюдия | |
— | Фантазия | |
— | Парафраз | |
— | Экспромт | |
— | Рапсодия | |
— | Музыкальный момент | |
— | Концертино | |
— | Этюд | |
— | Каприччио | |
— | Токката | |
— | Скерцо | |
— | Юмореска | |
— | Баллада | |
— | Новелетта | |
— | Песня без слов | |
— | Баркарола | |
— | Серенада | |
— | Ноктюрн | |
— | Марш | |
— | Вальс | |
— | Полька | |
— | Полонез | |
— | Мазурка | |
— | Рондо | |
— | Мелодия | |
— | другое | |
другое | — | |
Легкая инструментальная музыка | Сочинения для эстрадных оркестров и ансамблей — с солистами-инструменталистами и с вокалом без слов | |
Легкая инструментальная музыка | Пьеса | — |
Фантазия | — | |
Попурри | — | |
Парафраз | — | |
Классический джаз | — | |
Спиричуэлс (Спиричуэл) | В основе — невольничьи песни негров американского Юга. | |
Диксиленд | — | |
Свинг и его разновидности | Разновидность оркестрового джаза | |
Симфоджаз | — | |
другое | — | |
Музыка для духовых оркестров | Все сочинения, написанные для исполнения духовыми оркестрами. Переложения для духовых оркестров | |
Танцевальная музыка | Сочинения танцевального характера, без пения, в исполнении эстрадных оркестров, ансамблей, духовых оркестров, оркестров народных инструментов и прочее | |
Аллеманда | Инструментальный танец эпохи Барокко, стандартная составляющая сюиты (см. Р7.3) | |
Менуэт | — | |
Гавот | — | |
Сарабанда | — | |
Жига | — | |
Куранта | — | |
Тарантелла | — | |
Вальс | — | |
Танго | — | |
Полька | — | |
Краковяк | — | |
Полонез | — | |
Мазурка | — | |
Румба | — | |
Самба | — | |
Другое | — | |
Музыка для народных инструментов | Авторские сочинения и народная музыка для народных инструментов и оркестров. Переложения для них | |
Музыкальные заставки | — | |
Заставки | — | |
Позывные | — | |
Фанфары | — | |
другое | — | |
Вокально-симфоническая музыка | Произведения крупной формы для хора, певцов-солистов и симфонического оркестра, части и фрагменты из них | |
Оратория | — | |
Кантата | — | |
Месса | — | |
Реквием | — | |
Ода | — | |
Поэма | — | |
другое | — | |
Камерно-вокальная музыка | Сочинения малых форм, в том числе циклы для голоса в инструментальном сопровождении | |
Песня | — | |
Романс | — | |
Баллада | — | |
Элегия | — | |
Колыбельная | — | |
Баркарола | — | |
Серенада | — | |
Застольная | — | |
Болеро | — | |
Канцона | — | |
другое | — | |
Хоровая музыка | Авторские произведения малых форм, в т. | |
Для хора без сопровождения | — | |
В инструментальном сопровождении | — | |
Переложение для хора | — | |
Канты | — | |
другое | — | |
Духовная музыка | — | |
Православная | — | |
Духовная музыка | Католическая | — |
Псалмы | — | |
Стихиры | — | |
другое | — | |
Песни народов России и зарубежных стран | В том числе самобытного характера | |
Народные песни | Песни, исполняемые в инструментальном сопровождении и без сопровождения | |
Частушки, припевки | — | |
Народные песни | Песни, созданные на авторские тексты | |
Обрядовые песни | В том числе, свадебный плач | |
Песня-танец | — | |
Инструментальный вариант песни | — | |
другое | — | |
Гимны | — | |
Авторские песни | Популярные сочинения для массового, сольного, ансамблевого и хорового исполнения в различном сопровождении | |
Песни различной тематики | — | |
Песни, объединенные в авторские циклы | — | |
Песни из кинофильмов, телефильмов и мультфильмов | — | |
Песни из драматических спектаклей | — | |
Песни из радиопередач и радиопостановок | — | |
Инструментальный вариант песни | — | |
другое | — | |
Музыкально-сценическое искусство | — | |
Опера | Все сочинения, относящиеся к подкатегории оперы: музыкальная драма, лирическая трагедия, лирические сцены, опера-буфф, опера-балет и пр. | |
Балет | Все виды полных балетных спектаклей, завершенных фрагментов или номеров, входящих в балет | |
Оперетта | Все виды оперетт, включая мюзикл, все виды завершенных фрагментов или номеров, входящих в оперетту | |
другое | — | |
Портрет | — | |
Натюрморт | — | |
Пейзаж | — | |
Флора и фауна | — | |
Репортаж | Новостная фотография — требует быстроты построения композиции и мгновенной реакции на изменения ситуации. | |
Сочетается с фотожурналистикой. Зачастую снимки сделанные авторами-документалистами имеют не только документальную, но и художественную ценность. | ||
Специфические виды фотографии | — | |
Мобилография | Производится встроенными в смартфоны, планшеты, зажигалки, бинокли и т.д. фотокамерами. Здесь важно, в первую очередь, что изображено на снимке, а не то, какого качества фотография. | |
Макрофотография | Получение с помощью фотокамеры увеличенного во много раз изображения (например, глаз муравья). Здесь обычно применяют объективы с большим фокусным расстоянием или с фиксированным фокусным расстоянием 50, 100 или 180 мм | |
Специфические виды фотографии | Микрофотография | Получение изображения микроскопически малых объектов. Производится с помощью оптической системы микроскопа. Делится на оптическую, электронную и цифровую микрофотографию. |
Аэрофотосъемка | Фотосъемка территории и/или каких-либо объектов аэрофотоаппаратом с высокой разрешающей способностью с какого-либо летательного аппарата, в том числе с беспилотника. | |
Подводная фотосъемка | Фотосъемка подводных объектов с применением водонепроницаемого оборудования. Профессиональная фотосъемка производится с помощью специальных осветительных приборов. | |
Архитектурная фотография | Документальная передача с помощью фотографии внешнего вида или деталей архитектурного объекта, а также различных интерьеров. Объективы в основном применяются широкоугольные, дающие возможность более широкого охвата изображения. | |
Астрофотография | Применяется при наблюдениях и исследованиях космических объектов с помощью астрографов. Основана на использовании длительных выдержек, позволяет получать изображения объектов очень низкой яркости. Задействованы длиннофокусные объективы и специализированные оптические системы. | |
Ломография | Вид фотографии (от LoMo — «love and motion» — любовь и движение), который не берет во внимание такие понятия качества как резкость, цветопередача, плотность. Предполагает запечатление момента в любом виде, в том числе и посредством наложения нескольких кадров друг на друга. | |
Люминография | Люминография (светографика, светопись) — рисование светом. Суть фотосъемки заключается в рисовании лучом света от любого источника (фонарика, лампы, лазера…) в полностью затемненном пространстве при длительной выдержке. | |
Специфические виды фотографии | Сканография | От англ. Scanography — процесс сканирования и последующей компьютерной обработки фоторедакторами предметов, размещаемых непосредственно на стеклянной панели сканера. Изображение, полученное путем сканирования, называется сканограммой. |
Фотография в стиле «боке» | (от яп. Рисунок (не приводится) бокэ — размытость, нечеткость) — термин, описывающий субъективные художественные достоинства части изображения, оказавшегося не в фокусе на фотографии. Здесь фон размывается намеренно для визуального выделения главного объекта съемки. | |
Панорамная фотография | Фотосъемка панорам, которые подразделяются на планарные и виртуальные. Планарные, в свою очередь, делятся на фотографии прямолинейные, цилиндрические, которые проецируются на внутреннюю плоскость цилиндра, и сферические, где проекция осуществляется на внутреннюю сторону сферы с последующим разворотом (очень искажает изображение). Существуют также проекция Меркатора — нечто среднее между цилиндром и сферой, и кубическая проекция, при которой изображение отображается на шести гранях куба. Виртуальная панорама используется для компьютерного показа. | |
Пикториальная фотография | Авангардное направление в фотографии конца XIX — начала XX вв., заключающееся в сближении по восприятию снимка и живописного полотна. Фотографы, работающие в этом стиле, для этого использовали особые техники фотосъемки, мягкорисующие объективы, фильтры. | |
Пленэрная фотография | Техника фотосъемки модели или объекта в естественных условиях при естественном освещении. | |
Ночная фотография | Подразумевает фотосъемку ночью. При этом фотограф должны использоваться длинные выдержки, светосильные объективы и высокие значения чувствительности ISO. | |
Наименование категории фотографий | Наименование подкатегории фотографий | Комментарий |
Специфические виды фотографии | Стереофотография | Стереоскопическая фотосъемка — фотосъемка двух ракурсов (точек съемки), в результате которой получается стереопара |
Стробизм | Стробизм — использование искусственного освещения при съемке. Свет и вспышки применяются чаще всего для имитации дневного света. Модификатором света выступают минисофтбоксы и специальные зонты. Эти устройства нужны для создания точечных источников света определенной формы на хорошо освещенном предмете. | |
Фоторобот | Компьютеризированный процесс составления фотопортрета человека по показаниям свидетелей. Изначально для этих целей применялась фототехника. | |
Фотограмма | Изображение, полученное фотохимическим способом без применения фотоаппарата. Предмет помещают на фотобумагу или пленку и освещают лампой так, чтобы на фотоматериал попала его тень | |
другое | — | |
Репродукция | Воспроизведение и/или размножение различных изображений с помощью фотосъемки, в результате чего с помощью печати получают точную копию того или иного объекта. Это могут быть картины, рисунки, документы. | |
Рекламная фотография | Может использовать все категории и виды фотосъемок. | |
Спортивная фотосъемка | — | |
Фотомонтаж | Процесс и результат создания изображений, составленных из частей различных фотографий. | |
Фотоколлаж | Одно изображение, включающее в себя ряд других фото- и иных изображений, которые размещаются в нем в определенном порядке | |
Черно-белая фотография | Преобразование цветных снимков или их фрагментов в черно-белые для придания особого смысла элементам фотографии. | |
Химическая автография | Срез биологических тканей (растения, животных) прикладывают к фотобумаге, вещества межклеточной жидкости вступают в фотохимический процесс, результат — точное изображение объекта. Один из видов — радиоавтография: при прижимании объекта, содержащего радиоактивные изотопы к фотобумаге, образуется скрытое изображение. | |
Черно-белая фотография | Рейография | Способ бескамерной фотографии (1921 г.), названный по имени фотографа Мэн Рейя. Снимок получался прямым экспонированием предмета на светочувствительную бумагу. |
Шадография | Вид фотоискусства, представляющий собой абстрактные снимки, названный по имени фотографа Кристиана Шада (1918 г.). Абстрактные композиции создавались с помощью вырезок из газет и светочувствительной бумаги. | |
другое | — | |
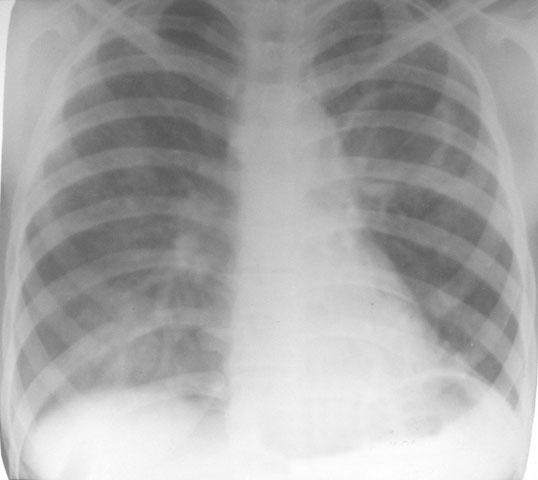
 ч. циклы
ч. циклы Все виды завершенных фрагментов или номеров, входящих в оперу, в т.ч. балетные сцены
Все виды завершенных фрагментов или номеров, входящих в оперу, в т.ч. балетные сцены


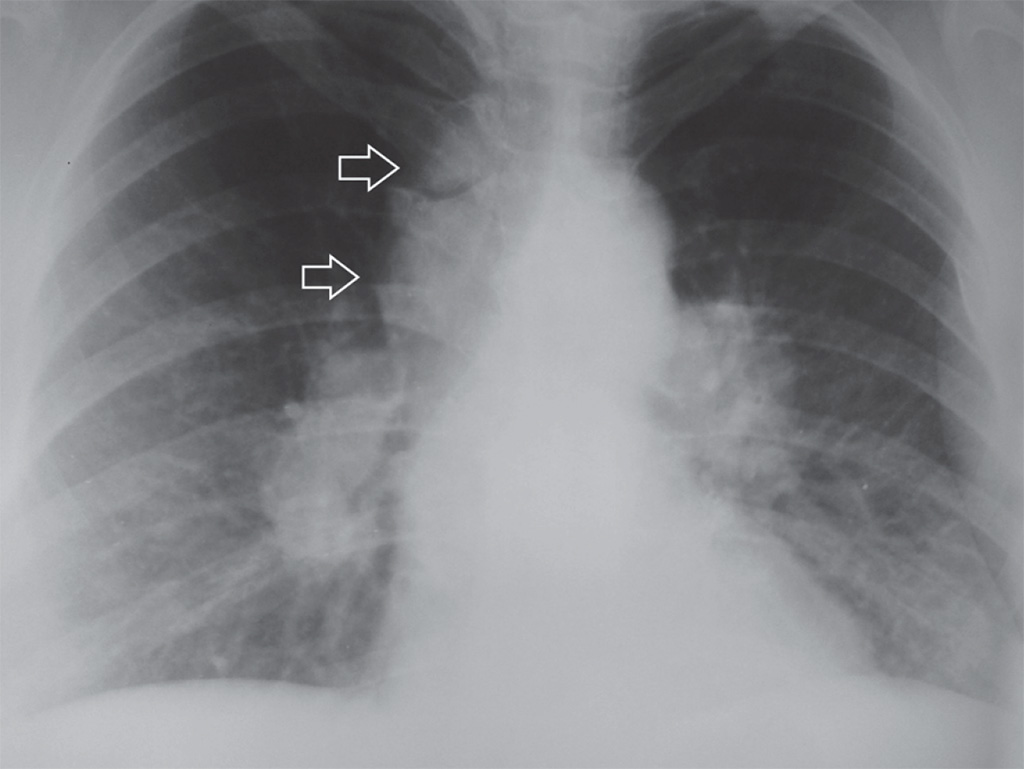
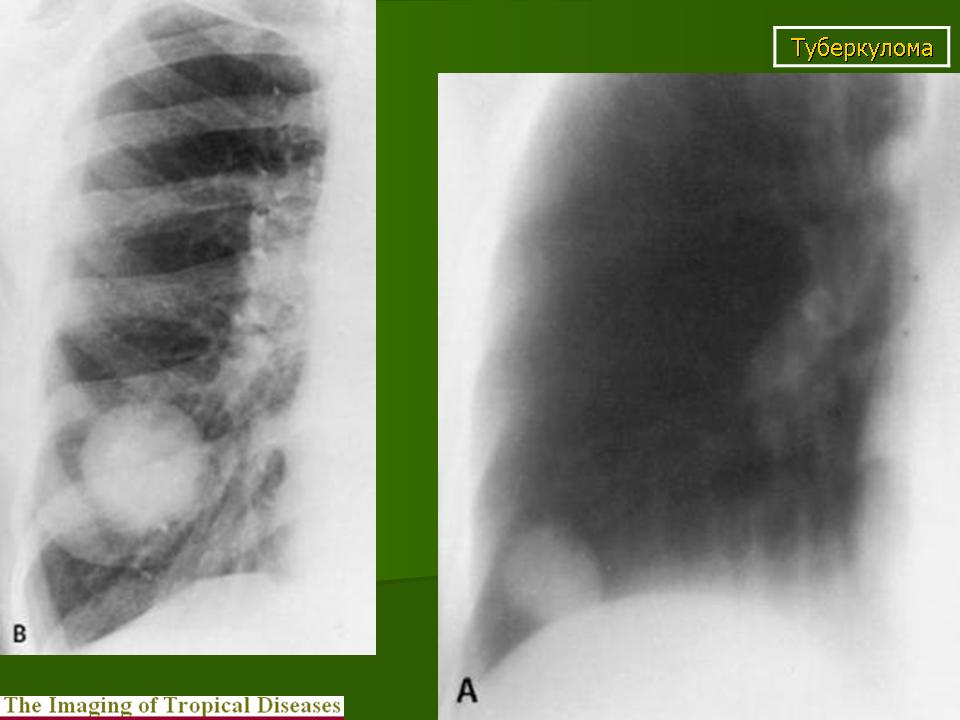
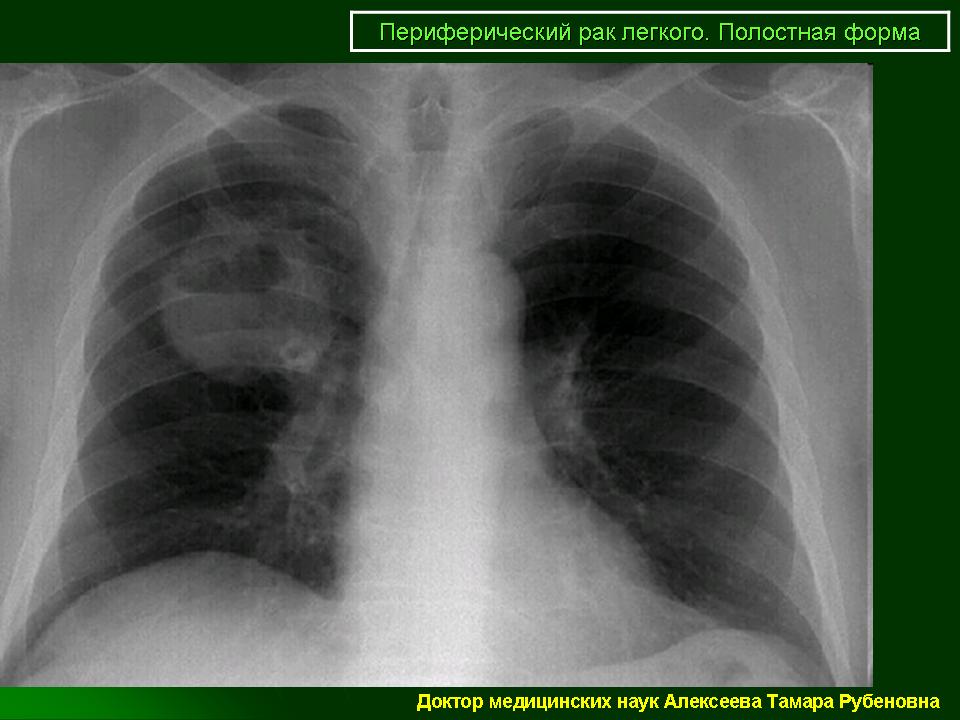
 При этом различают каталожную, имиджевую, предметную, интерьерную фотографии, а также деловой и политический портреты.
При этом различают каталожную, имиджевую, предметную, интерьерную фотографии, а также деловой и политический портреты.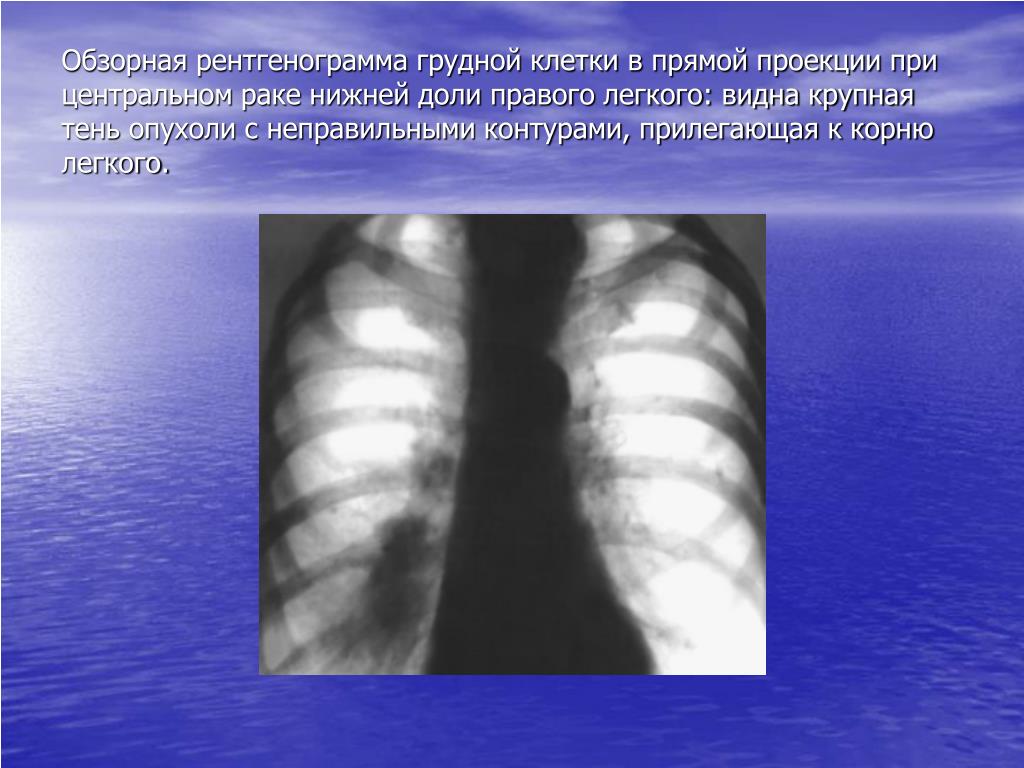
Расстояние от источника до пленки — обзор
II.D Радиографический контроль
Рентгеновские и гамма-лучи представляют собой электромагнитное излучение с длинами волн в диапазоне 10–10 −4 нанометров, и из-за очень короткой длины волны , проникает во все материалы.
Рентгеновские лучи образуются, когда высокоскоростные электроны останавливаются при ударе о металлическую пластину, поэтому основными элементами рентгеновской трубки являются нить накала в качестве источника электронов, пластина-мишень (анод) и источник очень высокого напряжения для ускорения электронов. Нить накала и анод должны быть встроены в высоковакуумную трубку. Для медицинских применений ускоряющее напряжение обычно составляет от 40 до 90 кВ, а для промышленных применений — от 40 кВ до 20 МВ, причем в большинстве случаев оно находится в диапазоне 100–300 кВ. Общепринятой практикой является описание получаемого рентгеновского излучения с точки зрения приложенного напряжения (например, рентгеновское излучение 300 кВ), а не длины волны. Для рентгеновских лучей очень высоких энергий обычная форма рентгеновской трубки и высоковольтного генератора нецелесообразна, и используется специальное оборудование, такое как линейные ускорители электронов (ускорители).
Нить накала и анод должны быть встроены в высоковакуумную трубку. Для медицинских применений ускоряющее напряжение обычно составляет от 40 до 90 кВ, а для промышленных применений — от 40 кВ до 20 МВ, причем в большинстве случаев оно находится в диапазоне 100–300 кВ. Общепринятой практикой является описание получаемого рентгеновского излучения с точки зрения приложенного напряжения (например, рентгеновское излучение 300 кВ), а не длины волны. Для рентгеновских лучей очень высоких энергий обычная форма рентгеновской трубки и высоковольтного генератора нецелесообразна, и используется специальное оборудование, такое как линейные ускорители электронов (ускорители).
Рентгеновские лучи распространяются прямолинейно; они могут быть рассеяны, но не сфокусированы. Таким образом, если подходящую фотопленку поместить на одну сторону образца (рис. 3), а источник рентгеновского излучения на противоположную сторону, пленка после соответствующего времени экспонирования и химической обработки (проявление, фиксация и промывка) , показывает изображение образца, в котором более тонкие части, такие как полости или трещины, куда проникает большая интенсивность излучения, регистрируются как более темные области (более высокая фотографическая плотность). Обработанную пленку помещают на освещенный экран для визуального осмотра и интерпретации изображения.
Обработанную пленку помещают на освещенный экран для визуального осмотра и интерпретации изображения.
РИСУНОК 3. Схема типичной рентгенографической установки. S = источник излучения. f = фильм. is = являются усиливающими экранами. c = трещина или щель в образце. A = полость в образце.
Гамма-лучи образуются естественным путем при распаде некоторых радиоактивных веществ, наиболее широко используемыми для промышленной радиографии являются искусственно полученные радиоизотопы иридий-192 и кобальт-60.
Они используются с пленкой для радиографии точно так же, как и с рентгеновскими лучами, и представляют собой относительно дешевые источники излучения с низкой выходной мощностью.
Для получения высококачественных рентгеновских и гамма-лучей очень важен тщательный выбор технических параметров.
- 1.
Энергия рентгеновского излучения (киловольты) должна соответствовать толщине образца и материалу.
- 2.
Резкость изображения зависит от физического диаметра источника излучения и правильного выбора расстояния от источника до пленки.
- 3.
Характеристики пленки определяют контрастность изображения.
- 4.
Яркость экрана должна соответствовать плотности фотопленки.

Рентгеновское и гамма-излучение создают радиационную опасность, и существуют строгие правила, регулирующие их безопасное использование. Как правило, эти правила требуют, чтобы рентгенография выполнялась в закрытых помещениях с толстыми стенками, но также возможна рентгенография на месте с помощью переносного оборудования, если установлена соответствующая радиационная защита.
Одним из обширных применений радиографии является проверка сварных швов на трубопроводах, когда источник излучения перемещается на дистанционно управляемом «гусеничном ходу» внутри трубы, а пленка обертывается снаружи трубы поверх каждого сварного шва.
Преимущества рентгенографии на пленке:
- 1.
Получается постоянное изображение, представляющее собой изображение образца в реальном размере, показывающее любые неоднородности в любом месте по толщине образца.
- 2.
Изображение четкое и обычно легко интерпретируется.
- 3.
Чувствительность обнаружения, особенно объемных дефектов, очень хорошая.
- 4.
Методы и процедуры хорошо задокументированы.

Недостатки:
- 1.
Рентгенография относительно медленная и дорогая.
- 2.
Для образцов толщиной более 100 мм из стали или эквивалента оборудование очень дорогое.
Несмотря на эти недостатки, радиография широко используется, особенно для контроля сварных швов, отливок и сварных деталей из аустенитной стали, а также сложных узлов.
Существуют альтернативные пленочным детекторы излучения — ионизационные камеры, сцинтилляционные кристаллы, слои аморфного селена, люминофоры с накоплением энергии, листы пластика, несущие поверхностный электростатический заряд, — но ни один из них не нашел широкого применения. Нейтроны и протоны также использовались для рентгенографии; хотя это не электромагнитное излучение, обычно используется термин «рентгенография».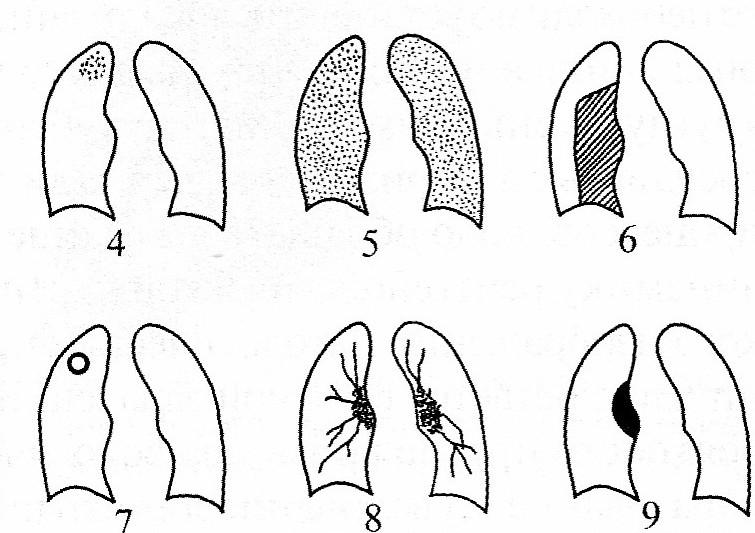
Рентгеноскопические методы, в которых видимое рентгеновское изображение создается на экране преобразования рентгеновских лучей в свет, стали очень важными с развитием рентгеновских усилителей изображения и использованием телевизионных камер, соединенных с компьютерная обработка изображений. Эти методы описаны в Разделе III.D.
Компьютеры также позволяют создавать новые формы рентгеновских изображений, в частности томографические (слоистые) изображения и изображения, сформированные рассеянным излучением (метод обратного рассеяния Комптона).Компьютеры можно использовать для оцифровки рентгенографического изображения путем сканирования пленки очень маленьким световым пятном. Это позволяет сохранять пленочные изображения в цифровом виде для передачи и улучшения качества изображения. Некоторое оборудование для этой цели использует до 4096 строк телевизионных растров с разрешением 50 мкм.
Симптомы, причины, лечение и прочее
Поражения печени — это группы аномальных клеток в печени. Ваш врач может назвать их образованием или опухолью.
Ваш врач может назвать их образованием или опухолью.
Часто встречаются доброкачественные или доброкачественные поражения печени.Они не распространяются на другие части тела и обычно не вызывают проблем со здоровьем. Но некоторые поражения печени образуются в результате рака.
Кто их получает?
Поражение печени может быть у любого человека, но некоторые факторы могут сделать вас более склонными к возникновению рака:
- Гепатит B или C: эти вирусы являются основной причиной рака печени.
- Цирроз печени. Вы можете заболеть этим заболеванием, если у вас гепатит B или C или если вы сильно пьете. Это происходит, когда на месте поврежденных клеток печени разрастается рубцовая ткань, и это может привести к раку.Около 80% людей, у которых диагностирован наиболее распространенный тип рака печени, гепатоцеллюлярная карцинома, страдают циррозом печени.
- Болезнь накопления железа (гемохроматоз). Это одно из наиболее распространенных генетических заболеваний в США. Оно заставляет организм получать слишком много железа из пищи. Избыточное железо накапливается в ваших органах, включая печень.
- Ожирение
- Мышьяк: Это химическое вещество встречается в природе, но может быть ядовитым. Иногда встречается в питьевой воде.
- Афлатоксин: этот токсин образуется, когда плесень растет на зерне и орехах, которые не хранятся должным образом.В США встречается очень редко.
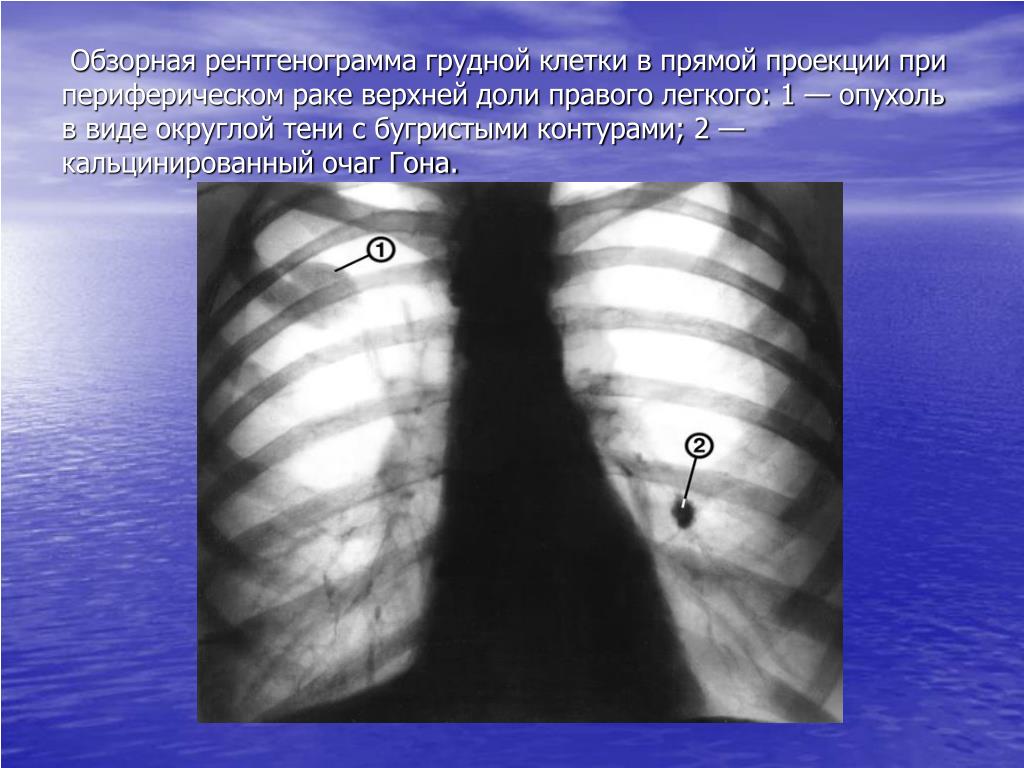 Оно заставляет организм получать слишком много железа из пищи. Избыточное железо накапливается в ваших органах, включая печень.
Оно заставляет организм получать слишком много железа из пищи. Избыточное железо накапливается в ваших органах, включая печень.
Симптомы
Доброкачественные поражения печени обычно не вызывают никаких симптомов. Многие люди узнают, что он у них есть, только когда они проходят визуализирующее обследование, например УЗИ, по поводу другой проблемы со здоровьем.
Если это действительно вызывает проблемы, ваши симптомы будут зависеть от вашего типа. Они могут включать:
Диагностика
Если ваш врач считает, что у вас может быть поражение печени, он, вероятно, порекомендует один или несколько из них:
- Анализы крови. хорошо работает твоя печень. Они также могут захотеть проверить уровень определенного белка (альфа-фетопротеин или АФП). Его большое количество может быть признаком рака печени.
- Визуализирующие исследования: они могут показать, где находится поражение печени и насколько оно велико. Магнитно-резонансная томография (МРТ) использует мощные магниты и радиоволны для получения подробных изображений вашей печени. Компьютерная томография (КТ) представляет собой серию рентгеновских снимков, объединенных для получения более полной картины. При позитронно-эмиссионной томографии (ПЭТ) используется специальный краситель, благодаря которому ваша печень становится более четкой.А ультразвук использует высокочастотные звуковые волны, чтобы сделать живые изображения вашей печени.
- Биопсия. Чтобы исключить рак, врач может взять небольшой образец поражения для поиска проблемных клеток.
 Они также могут захотеть проверить уровень определенного белка (альфа-фетопротеин или АФП). Его большое количество может быть признаком рака печени.
Они также могут захотеть проверить уровень определенного белка (альфа-фетопротеин или АФП). Его большое количество может быть признаком рака печени.
Лечение
Если у вас нет симптомов, возможно, вам не нужно ничего делать с поражением. Если он вызывает у вас проблемы, но не является раковым, ваш врач может порекомендовать операцию, чтобы удалить его и облегчить ваши симптомы.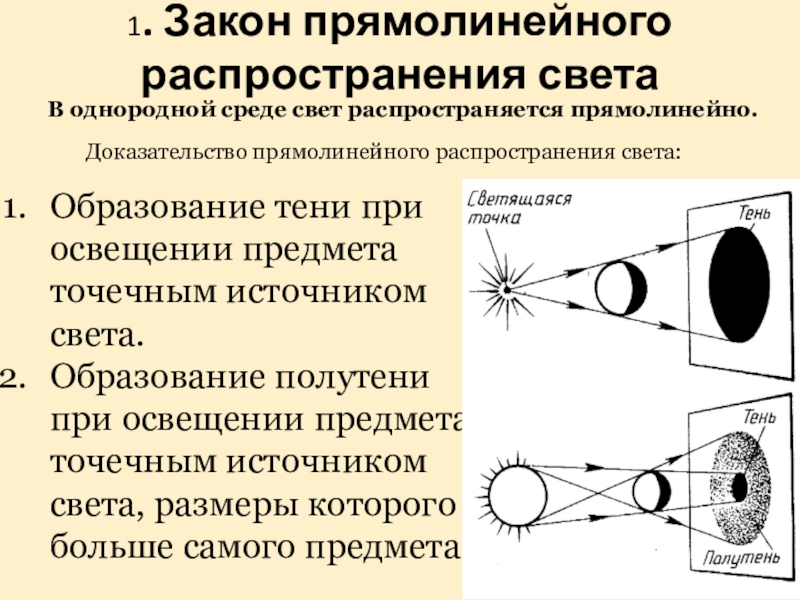
Если поражение злокачественное, вам может понадобиться одно или несколько из следующих средств:
- Химиотерапия: это комбинация сильнодействующих препаратов, предназначенных для уничтожения раковых клеток.Это наиболее распространенный метод лечения поражений печени, которые распространяются на другие части тела.
- Трансартериальная химиоэмболизация (ТАХЭ): это целенаправленный тип химиотерапии, при котором противораковые препараты доставляются непосредственно к очагу поражения. Они текут через крошечную трубку, называемую катетером, в артерию, которая приносит кровь в вашу печень. Это также блокирует приток крови к печени, что не позволяет раковым клеткам получать кислород, необходимый им для роста. TACE вызывает меньше побочных эффектов, чем обычная химиотерапия.
- Радиочастотная абляция (РЧА). Если поражение небольшое, врач может порекомендовать эту процедуру. Они направят небольшой зонд к опухоли в вашей печени, обычно через крошечные разрезы в животе. Зонд испускает определенную энергию, которая нагревает и убивает раковые клетки.
 Зонд испускает определенную энергию, которая нагревает и убивает раковые клетки.
Зонд испускает определенную энергию, которая нагревает и убивает раковые клетки.
Профилактика
Вы можете снизить свои шансы заболеть раком печени, если будете заниматься спортом, поддерживать здоровый вес и пить только в умеренных количествах (до двух порций в день для мужчин и одной для женщин).
И вы можете сделать несколько вещей, чтобы не заболеть гепатитом B или C, которые вызывают 80% случаев рака печени. Вы можете сделать прививку от гепатита В, носить презервативы во время полового акта и не пользоваться общими иглами, если вы используете их для рекреационных наркотиков.
Поражения головного мозга: симптомы, причины, лечение
Обзор
Что такое поражение головного мозга?
Поражения головного мозга — это тип повреждения любой части головного мозга. Поражения могут быть вызваны болезнью, травмой или врожденным дефектом.Иногда поражения появляются в определенной области мозга. В других случаях поражения присутствуют в значительной части мозговой ткани. Сначала поражение головного мозга может не вызывать никаких симптомов. По мере ухудшения состояния со временем симптомы становятся более заметными.
Сначала поражение головного мозга может не вызывать никаких симптомов. По мере ухудшения состояния со временем симптомы становятся более заметными.
Как работает мозг?
Мозг контролирует мысли, память, речь, движения конечностей и работу органов. Мозг состоит из множества частей, и каждая часть играет определенную роль в организме человека.
Четыре доли составляют мозг:
Лобная доля — самая большая из четырех долей, отвечает за двигательные навыки тела, такие как произвольные движения, язык, а также интеллектуальные и поведенческие функции.Эта область контролирует память, интеллект, концентрацию, темперамент и личность.
Височная доля — расположена с каждой стороны мозга на уровне уха, важна для слуха, памяти и речи.
Теменная доля — в центре мозга, где воспринимается и интерпретируется сенсорная информация, такая как тепло, давление и боль.
Затылочная доля — находится в задней части головного мозга, в первую очередь отвечает за зрение.
Симптомы и причины
Что вызывает поражение головного мозга?
Поражения головного мозга могут быть вызваны множеством различных триггеров.Следующие факторы повышают риск поражения головного мозга:
- Старение
- Семейный анамнез поражений головного мозга. Риск увеличивается, если у кого-то из членов семьи было это заболевание.
- Сосудистые заболевания , такие как инсульт, высокое кровяное давление и аневризмы мозговых артерий
- Травма головного мозга , которая может вызвать внутреннее кровотечение. Если не исправить, это может привести к смерти.
- Инфекции , вредные микробы или бактерии в головном мозге.Они могут вызывать такие заболевания, как менингит и энцефалит (оба типа отека (воспаления) головного мозга).
- Опухоли , которые либо начинаются в головном мозге (первичные опухоли), либо перемещаются туда (метастатические) через кровеносные или лимфатические сосуды
- Аутоиммунные заболевания , такие как волчанка и рассеянный склероз. Это происходит, когда антитела организма начинают атаковать собственные ткани организма, например ткани головного мозга.
- Бляшки или избыточное накопление аномального белка в тканях головного мозга или в кровеносных сосудах, замедляющее приток крови к мозгу, что наблюдается при закупорке артерий.Болезнь Альцгеймера, состояние, которое влияет на память, мышление и поведение человека, развивается из-за бляшек в тканях головного мозга. Рассеянный склероз также может вызывать бляшки в головном мозге, вторичные по отношению к поврежденной ткани.
- Воздействие радиации или некоторых химических веществ , повышающих вероятность возникновения опухолей и поражений головного мозга
- Токсины , такие как чрезмерное количество алкоголя или сигаретного дыма в организме. Другими токсичными веществами являются повышенные уровни аммиака и мочевины в организме из-за проблем с почками (могут повлиять на функцию мозга, но могут не проявлять отдельных поражений головного мозга).
- Плохое питание , особенно еда продуктов с избытками жиров и холестерина
 Это происходит, когда антитела организма начинают атаковать собственные ткани организма, например ткани головного мозга.
Это происходит, когда антитела организма начинают атаковать собственные ткани организма, например ткани головного мозга.
Какие заболевания вызывают поражения мозга?
- Хид , травмы сосудов или нарушение поставки крови в мозг , пожалуй, ведущей причиной поражений на мозгу.
- Рассеянный склероз или MS , , — это заболевание, где поражения мозга расположены на нескольких участках мозга. Те, кто страдал от MS имеет значительные проблемы с двигателем и сенсорными функциями.
- Lupus , , Аоиммутная заболевание, влияет на почти все системы тела, начиная от кожи до сердца, печени, мышц и мозга. Поражения мозга, как правило, являются симптомом этого заболевания.
- Опухоли также являются причиной поражений мозга и ненормального роста клеток головного мозга.
Каковы симптомы поражений головного мозга?
Симптомы поражения головного мозга различаются в зависимости от типа поражения, его степени и места обнаружения.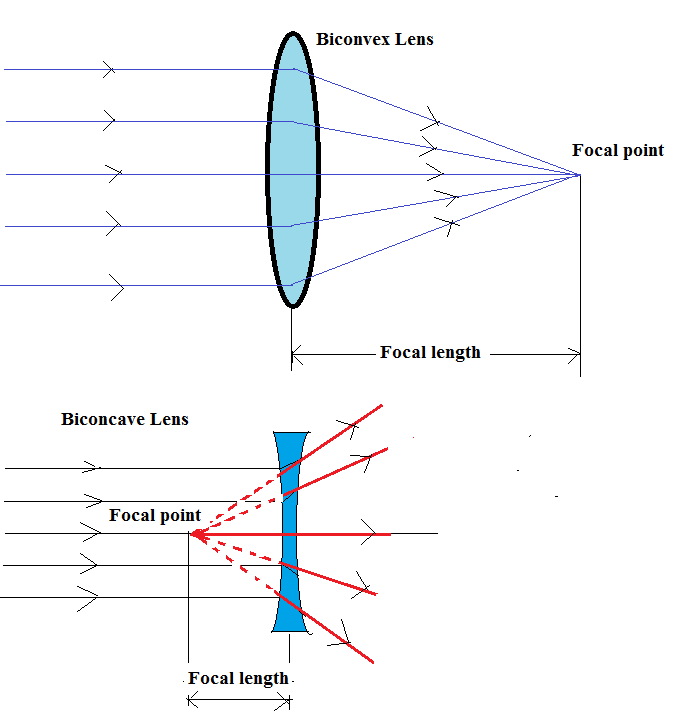 Все разные, и симптомы будут варьироваться в отдельных случаях.Многие поражения, однако, могут быть в районах мозга, которые не вызывают симптомов.
Все разные, и симптомы будут варьироваться в отдельных случаях.Многие поражения, однако, могут быть в районах мозга, которые не вызывают симптомов.
Типичные симптомы могут включать в себя:
- Головные боли обычно являются первым симптомом, чтобы появиться с поражениями мозга. Боль появляется внезапно и ухудшается с течением времени. Преодоленная медицина обычно не обеспечивает облегчения боли.
- тошнота и возможная рвота
- нарушение движения, если поражение влияет на часть мозга, ответственного за мотоцикл
- Отсутствие концентрации, неспособность принимать быстрые решения и агитацию
- Задержка речи, размытое видение и нарушенное слушание
- Непроизвольные движения части тела, которые могут продвигаться к судорогам в тяжелых случаях
Следующие симптомы специфичны для поражения лобной доли:
- Отсутствие чувства запаха, обычно ограниченное одному Nostilil
- Нарушение речи
- Потеря двигательной активности на одной или обеих сторонах тела
- Поведенческие изменения
Следующие симптомы относятся к поражениям временной доли:
- Изменение поведения и эмоций
- Срывание в ощущении запаха, вкуса и слуха
- Язык и расстройства речи
- Проблемы с полем Vision
- Забывчивость и неспособность сосредоточиться на
Следующие симптомы специфичны для поражений париетальной доли:
- Потеря ощущений, таких как Touch
- Астереоозиоз или неспособность к идентичности вещи, размещенные в руке
- Ослабление языкового развития
Следующие симптомы специфичны для поражения затылочной доли:
Диагностика и тесты
Как диагностированы поражения мозга?
Если симптомы предполагают, что человек может страдать от поражения мозга (ы), важно связаться с доктором для назначения.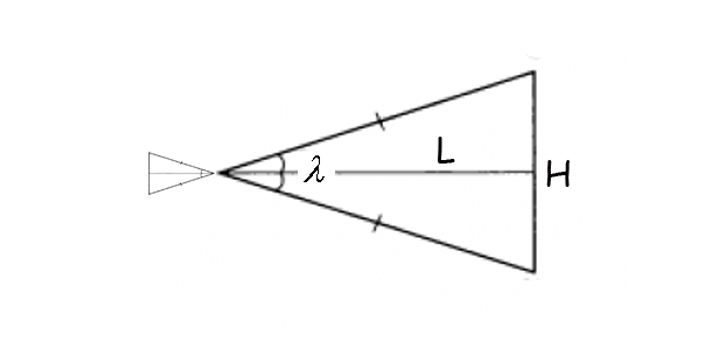 Врач поможет поставить диагноз и предложит варианты лечения для каждого пациента в зависимости от степени заболевания.
Врач поможет поставить диагноз и предложит варианты лечения для каждого пациента в зависимости от степени заболевания.
Врач задаст вопросы о симптомах пациента и истории болезни, а затем проведет медицинский осмотр.
Для определения локализации поражения врач может прикасаться к коже пациента горячими, холодными или вибрирующими предметами, а также может ущипнуть пациента для проверки болевых ощущений. Врач также может порекомендовать дополнительные тесты для дальнейшей оценки состояния.
Какие тесты диагностируют поражения головного мозга?
После медицинского осмотра врач может также порекомендовать пациенту пройти диагностическое обследование, например компьютерную томографию, КТ или компьютерную томографию, магнитно-резонансную томографию или МРТ. Эти тесты помогут врачу точно определить место поражения, а также оценить степень повреждения головного мозга, вызванного поражением.
Компьютерная томография (КТ или компьютерная томография) — это диагностическое изображение, используемое для оценки костей, крови и мозговой ткани.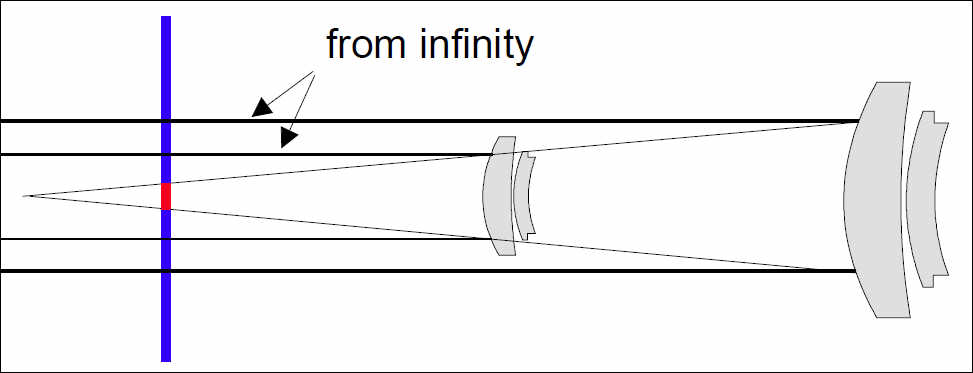 Иногда в вену пациента вводят лекарство, чтобы выделить структуры мозга. КТ использует радиацию.
Иногда в вену пациента вводят лекарство, чтобы выделить структуры мозга. КТ использует радиацию.
Магнитно-резонансная томография (МРТ) — это диагностический тест, который позволяет получить трехмерные или трехмерные изображения внутренней части тела с использованием магнитных полей и компьютерных технологий. Он показывает детали ткани головного мозга, а также ствол мозга и мозжечок (задний мозг) лучше, чем компьютерная томография. МРТ головного мозга может помочь определить, есть ли признаки предшествующих мини-инсультов.Лекарство (контраст) также может быть введено, чтобы помочь светлым структурам.
Управление и лечение
Как лечат поражения головного мозга?
Лечение варьируется в каждом индивидуальном случае в зависимости от типа поражения, его локализации и причины. Важно, чтобы врач провел тщательное обследование для разработки соответствующего плана лечения.
Варианты лечения зависят от типа поражений и тяжести симптомов. Обычно лекарства могут быть использованы для лечения основной причины.Хирургия может быть вариантом в некоторых случаях, например, когда поражения вызваны опухолью головного мозга.
Обычно лекарства могут быть использованы для лечения основной причины.Хирургия может быть вариантом в некоторых случаях, например, когда поражения вызваны опухолью головного мозга.
Иногда поражения и симптомы не улучшаются даже после соответствующей диагностики и надлежащего лечения, и цель состоит в том, чтобы справиться с симптомами.
бусины для фокусировки salmo – salmologic
Флуоресцентные бусины Salmo в основном предназначены для использования на двойных крючках, но также могут использоваться на тройных и одинарных крючках.
Фокусные бусины Salmo служат двум основным целям.Они привлекают внимание рыбы, в том числе в условиях низкой освещенности, и защищают длинношерстных мух от короткой стрижки с течением времени.
Что делает флуоресцентные цвета такими привлекательными, так это то, как они выделяются из окружающей среды. Но они выделяются, только если у вас есть ультрафиолетовый (УФ) свет. Пока это дневной свет, у вас всегда будет какой-то ультрафиолетовый свет. Чем ярче дневной свет, тем легче увидеть флуоресцентные объекты. Ночью УФ-лучи не достигают Земли, поэтому флуоресцентные цвета не действуют ночью.
Чем ярче дневной свет, тем легче увидеть флуоресцентные объекты. Ночью УФ-лучи не достигают Земли, поэтому флуоресцентные цвета не действуют ночью.
Фокусные бусины Salmo очень хороши для использования в условиях низкой освещенности или при ловле рыбы на большей глубине реки. Причина этого в том, что УФ-лучи достигают дна в течение дня и тем самым дают нашей мухе точку фокусировки, и рыбам будет легче ее заметить. Часто мы ловим рыбу в туманной воде или очень рано утром, или в конце дня. Я считаю, что в подобных ситуациях у нас есть преимущество при использовании бусинок для фокусных точек Salmo, и именно тогда их следует использовать.Я бы не рекомендовал использовать их в чистой реке, когда у нас сильный солнечный свет = сильные ультрафиолетовые лучи, так как, на мой взгляд, это будет слишком много и может иметь обратный эффект.
Еще один отличный эффект, которого можно добиться, используя бусины для фокусировки лосося, заключается в том, что ваши длинношерстные лососевые мушки не обрезаются при ловле с ними.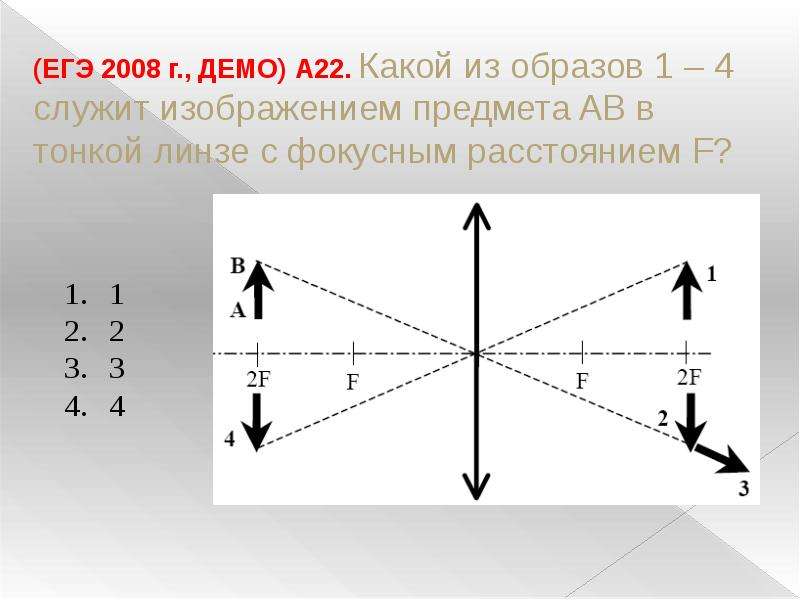 Размещение бусинок Salmo в нижней части цевья двойного крючка предотвращает срезание волос между прорезями крючков. Это также дает вашей мухе лучший баланс на течении, так как крючок меньше склонен «зависать».
Размещение бусинок Salmo в нижней части цевья двойного крючка предотвращает срезание волос между прорезями крючков. Это также дает вашей мухе лучший баланс на течении, так как крючок меньше склонен «зависать».
Мы не должны забывать, что привлекательность вашей мухи зависит от множества факторов, включая ее движение, форму и цвет. Мы убеждены, что при правильном использовании бусины для фокусных точек Salmo подходят именно туда.
Фокусная точка Salmo – фуксия
Используется в холодную и пасмурную погоду, осенью и ранней весной. Вместе с мухами, одетыми в черный, розовый, фуксийский, фиолетовый или лиловый цвета. Это очень типичные окрасы стальных голов.
Светоотражатель Salmo – оранжевый
Можно использовать круглый год. Хорошо работают с мухами, одетыми в оранжевый, коричневый, черный и оливковый цвета. Сильный фокусирующий цвет как для лососевых, так и для морских форелевых мушек.
Фокусная точка Salmo – зеленая
В основном для использования в начале лета с мухами зеленого, черного и оливкового цветов.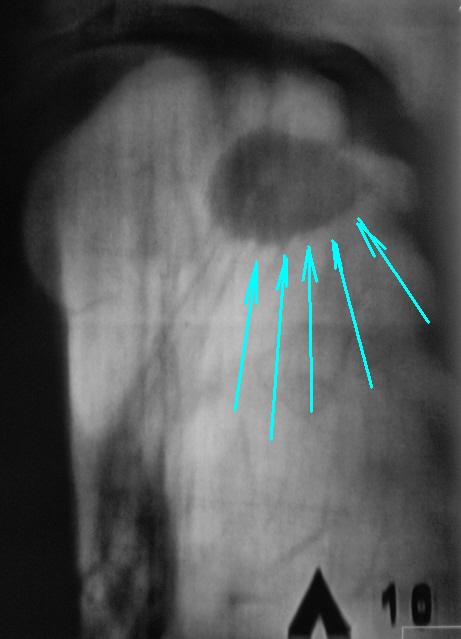 Очень хорошо работает ранним утром и поздним вечером, когда на воде нет солнечного света. Отлично подходит для пасмурных летних дней.
Очень хорошо работает ранним утром и поздним вечером, когда на воде нет солнечного света. Отлично подходит для пасмурных летних дней.
Фокусная точка Salmo – желтый
С ранней весны до конца осени.Прекрасно работает с мухами, одетыми в желтый, солнечный и черный цвета. Не следует использовать, когда вода чистая и на нее падают прямые солнечные лучи.
Фокусная точка Salmo – красный
Всесезонный цвет. Отлично подходит для мух, одетых в оранжевый, коричневый, солнечные лучи и черный. Хороший выбор при ловле на больших глубинах весной и осенью.
Фокусные линзы Salmo доступны в четырех различных комплектах. Мы тестировали различные цветовые комбинации в течение многих лет и не сомневаемся, что они влияют на наш коэффициент улова при правильном использовании в соответствии с УФ-лучами.
фокус Salmo / морская форель
Красный/оранжевый
Фокусная точка Salmo / лосось 1
Красный / Желтый
Фокусная точка Salmo / лосось 2
Красный/Зеленый
Фокусная точка Salmo / стальная головка
Фуксия / Оранжевый
фотографий с тенями, которые стоит увидеть — посмотрите финалистов фотоконкурсов!
Спасибо всем фотографам, которые поделились своими лучшими снимками, демонстрирующими использование теней в фотографии, в этом фотоконкурсе в сотрудничестве с нашими друзьями по телефонам Focal Press, Macphun и Rick Sammon .
Focal Press уже более 75 лет является ведущим издателем книг по медиатехнологиям. Мы предоставляем необходимые ресурсы для профессионалов и студентов во многих областях, включая производство аудио, фильмов и цифрового видео, фотографии и цифровых изображений, анимации, вещания, театра и веб-дизайна. Мы стремимся публиковать высококачественные книги, наполненные практической информацией о передовых и конвергентных технологиях от экспертов в этой области. Посетите МастерингФото.com — блог, поддерживаемый Focal Press.
Вы запечатлеете момент, а наше программное обеспечение поможет вам раскрыть его настоящую красоту и характер. С преданными пользователями по всему миру Macphun ежедневно помогает миллионам фотографий становиться более привлекательными.
Разница между видением и взглядом существенна — так же, как в музыке разница между слухом и слушанием. В Креативной визуализации мастер-фотограф, фотопедагог и фотоинструктор Рик Сэммон представляет свою проверенную методологию творческой цифровой фотографии. Его фирменный вдохновляющий и мотивирующий подход открывает творческие возможности для фотографов в самых разных жанрах.
Его фирменный вдохновляющий и мотивирующий подход открывает творческие возможности для фотографов в самых разных жанрах.
На простых примерах Сэммон показывает, как простые изменения — с визуализацией, композицией, постобработкой и т. д. — могут означать разницу между моментальным снимком и отличным снимком. Эта книга, иллюстрированная более чем 300 фотографиями Рика, содержит бесценную информацию об экспозиции, композиции, выборе объекта, освещении, настроении и глубине. Выучить больше.
«Зимний блюз» Джеффа Чендлера
«Дэнни» Ханнасаба
«Тоска по кому-то…» от zetlog
«Конец дней» Джулиеверхарт
«Прах к праху» RCorneliusphoto
«У всего есть две стороны» (А) Мэтьюкили
«Секция трубы» Эша Томсона
«Молчание не всегда золотое, иногда желтое» от wenchejostad
«терминал» от boitasapin
«The-Batcave» автора phillip_brossette
«ТЕНИ» Говардаштона-Джонса
«Библиотечные двери» от FrankSomma
«Кровать папоротников» от allaboutvibe
«Кендра3» Дакотабурнз
«Остерегайтесь ребенка» от (A)Novia
«. .. é nato prima l’uovo o la terrazza?» by manuelbuetti
.. é nato prima l’uovo o la terrazza?» by manuelbuetti
«DSC02445» от Nicolas_Carbenay
«Катха» Джонатанфидлера
«Что она видела…» от BendTheLight
«Золото дураков» Венди Хадналл
«Солнечный свет на перилах» Тимби
«Меня преследует лунная тень» Джеймса Уилера
«Tunnel Vision BW» от Studio19
«грубая зависимость» от Twilightscapes
«Таинственная тропа» ИзабеллыD
«Тени» Беккикемпф
«Озеро Тэмблинган» от matoy
«Мост зимой» (A)jld83photography
«В погоне за тенями» njumlin
«OR Dunes 041» от Dalriada50
«Затемнение» от BrunoCote
«Впусти меня» автора (А)роландшайнидзе
«Подере Бельведер» от WillG
«Ночные размышления» (A)julieharrington
«пиллинги» от DPPhotography
«DSC_0245» от (A)erinkatehillman
«история означает тайну» Шриманта
«Тени заката» по нику
«Без названия» Джейкоэн
«Каньон Антилопы» Бенбленнера
«Цыганская тень» от (A)dixiegypsy
«Утренняя подача» Моринлайт
«изображение» Шелспир
«Закат в пустыне» от Fineartphotography
«Я бы обменял тысячу вечностей» от phil1
«Сухой сезон» от MCsaba
«Осень» Лизаамандабрадшоу
«Сердце зимы» от GerryM
«Сказка о доме» Руки
«Гармония» ФлоренцияK
«Пчела приближается» от jillysidebottom
«Зеркальный столб восхода солнца» от BensViewfinder
«Венецианский закат» Стивенджей
«Я и моя тень 2076 PRT» от Bozzzzz
«Под пирсом» Кэтимуле
фокусных точек для извлечения с помощью шаблонов FotoInspired
Печать PDFСегодня Мики Крюгер рассказывает, как создавать фокусные точки извлечения с помощью шаблонов FotoInspired
.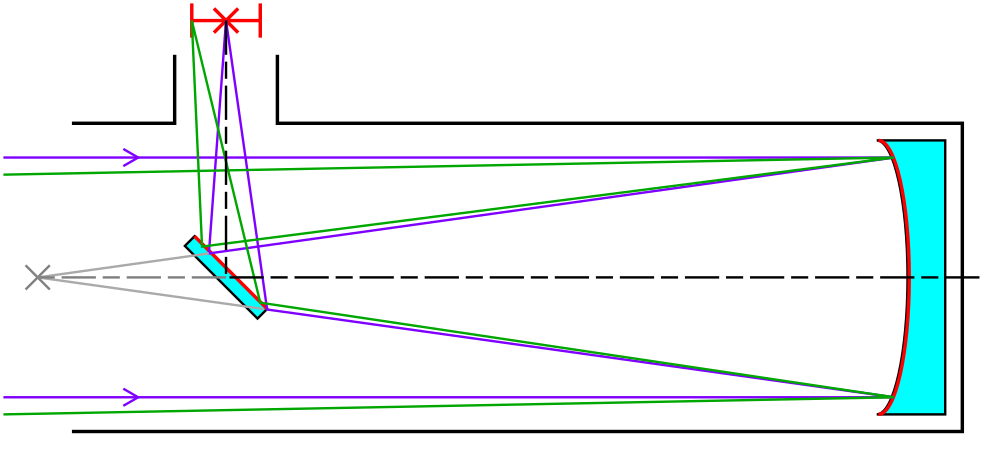
Это руководство предназначено как для Adobe Photoshop, так и для Elements.
Фокусные точки для извлечения с помощью шаблонов FotoInspired
ВведениеВ этом уроке вы узнаете, как:
- Используйте шаблон FotoInspired в качестве Foundation для искусного дизайна макета цифрового скрапбукинга.
- Изменить шаблон с точки зрения размера и замены кадров.
- Создайте Размерное «выходящее за границы» извлеченное изображение Фокусная точка.
- Украсьте «фотомаски», чтобы поддержать свой фотодизайн.
Примечание.
- Органический узор имеет неправильную форму и не подчиняется строгим правилам геометрии или симметрии.
- Они похожи на естественные формы , лишенные прямых линий или резких краев .
- Текстура относится к поверхностным характеристикам материала. Он шероховатый или гладкий? Плюшевый или шершавый?
- Измерение (или глубина) — это измеримая степень, до которой что-то поднимается над страницей.
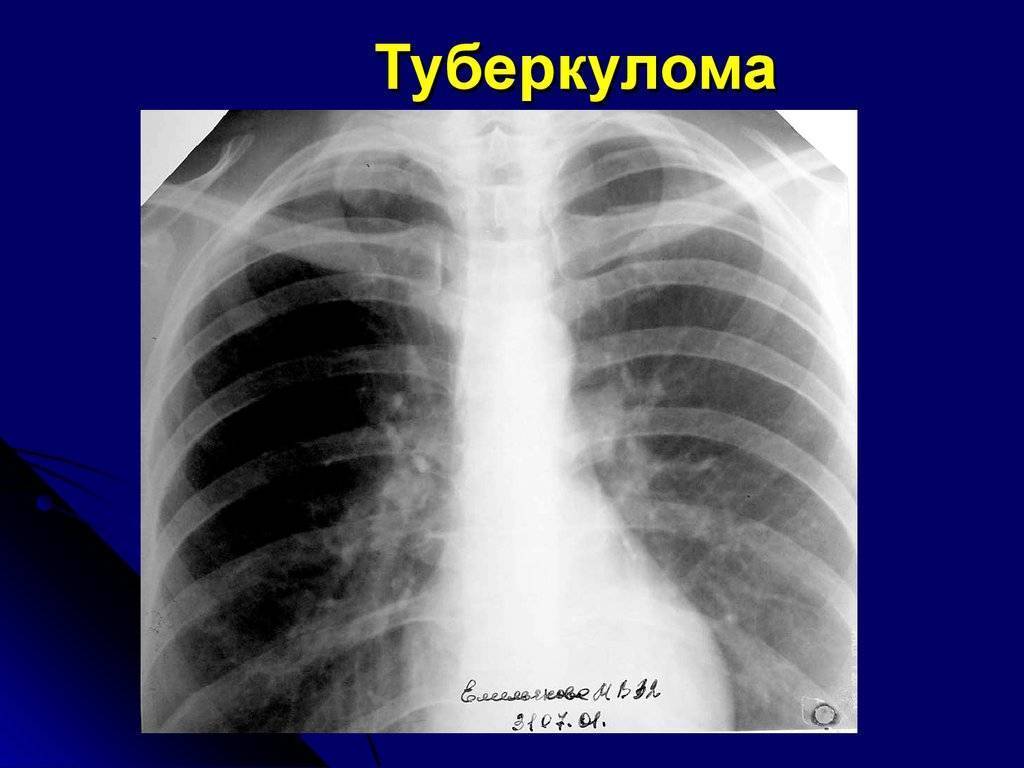 Он шероховатый или гладкий? Плюшевый или шершавый?
Он шероховатый или гладкий? Плюшевый или шершавый?1. Изменение шаблона FotoInspired«На ваши страницы можно добавить реальную текстуру и размер (а также иллюзию текстуры и размера), чтобы создать ощущение органичности». – Дебби Ходжес.
Выберите и измените размер слоев шаблона по своему усмотрению с помощью инструментов «Переместить» и «Трансформировать».
- Использование страницы 7 из пакета шаблонов FotoInspired № 2K
- Измените размер, выделив все кадры, «фотомаски» и слои сшивания на панели слоев .
- Используйте инструмент преобразования с по Правка > Свободное преобразование или CMD/CTRL + T .
- Щелкните угол ограничивающей рамки и измените размер по своему усмотрению.
- Размер рамок был изменен, чтобы соответствовать площади 8 1/2 x 8 1/2 дюйма.

Примечание.
- Формат сетки шаблонов FotoInspired позволяет легко вносить изменения.
- Вы также можете заменить кадры другими элементами кадра из палитр Artplay или кадров из магазина aA .
- Рамка из почтовых рамок № 2 была размещена вместо двух больших слоев «фотомаски» с левой стороны шаблона.
- Текстуру рамки штампа создайте Визуальный интерес и Натяжение путем наложения прямоугольников в противоположных направлениях.
Дополнительно.
- Отключите Видимость других слоев шаблона FotoInspired, пока вы создаете фокусную точку «За пределами границ» .
- Щелкните значок «глаз» рядом с каждым слоем на панели слоев .
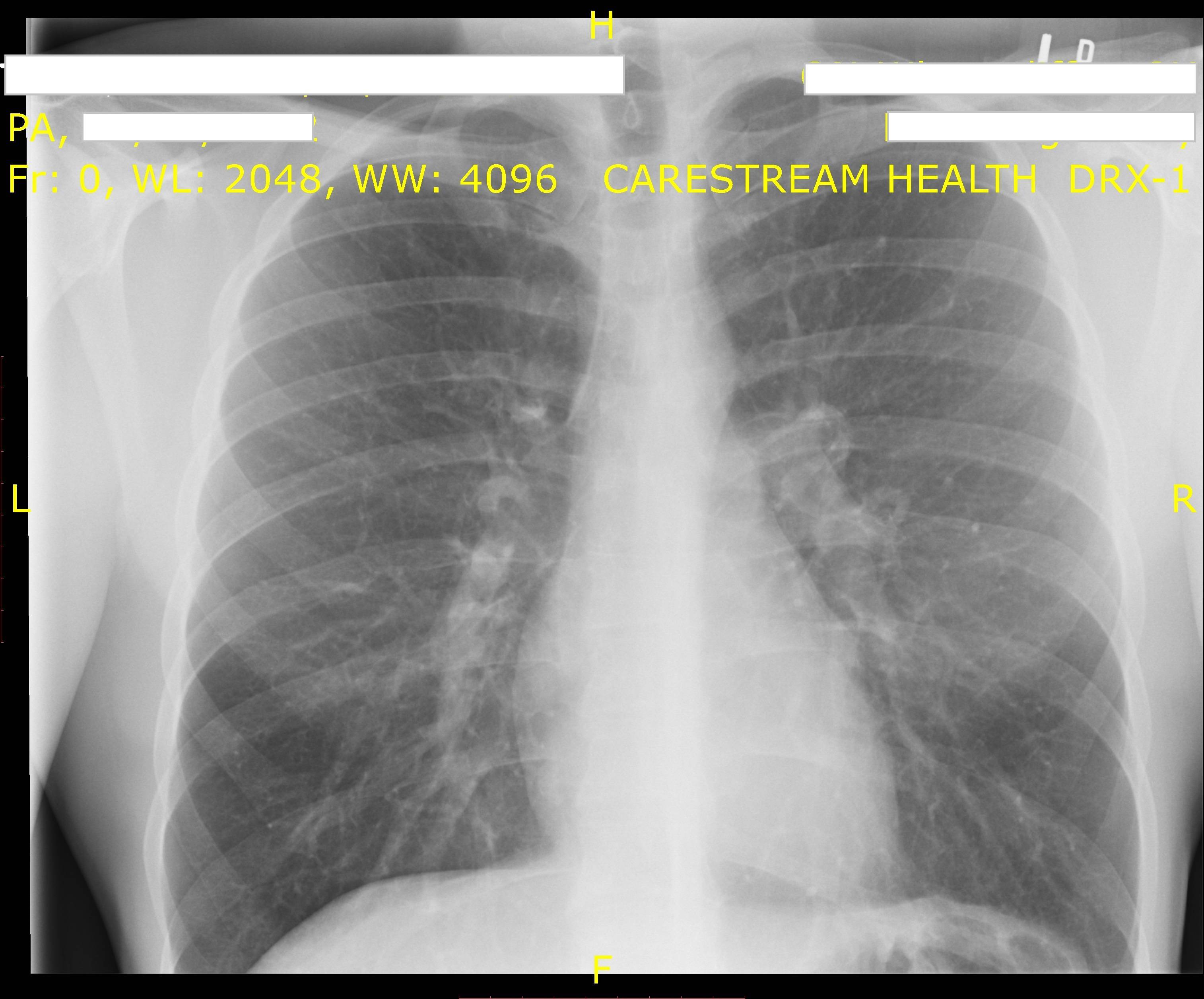
а) Создайте извлечение с помощью инструмента быстрого выбора.
- Щелкните инструмент Quick Selection и перетащите курсор на область Subject .
- Обратите внимание на линию «марширующих муравьев», которая появляется вокруг формы , которая определяет выделение .
- Добавьте к этому выбору, продолжая перетаскивать курсор по объекту фотографии, чтобы выбрать ВСЕ областей.
- Затем перейдите к Select> Inverse , чтобы изменить выбор объекта на Background.
- Нажмите CMD/CTRL + X , чтобы удалить фоновую область
Наконечник.
- Этот метод лучше всего работает при использовании четко определенного объекта фотографии.
- Вам также может понадобиться инструмент «Ластик» , чтобы удалить «беспорядочные пиксели», которые не удалось захватить с помощью инструмента быстрого выделения .
b) Примените Пользовательскую Тень, чтобы получить реалистичный размер.
- Выделите извлеченный объект фотографии, нажимая кнопки CMD/CTRL на клавиатуре, одновременно щелкая слой изображения на панели слоев .
- «Марширующие муравьи» снова появятся вокруг «Эвакуация».
- Создайте новый слой под извлеченным изображением, выбрав Слой > Новый слой .
- Выберите инструмент Paint Bucket Tool на панели инструментов и залейте слой цветом Black или Grey.
- Обратите внимание, что Цветовая заливка ограничена выбором объекта.
- Сместите эту «тень» с помощью клавиш со стрелками , чтобы переместить ее вправо/влево и вверх/вниз в соответствии с предполагаемым источником света .
- Перейдите к Фильтры > Размытие > Размытие по Гауссу .
- В диалоговом окне установите Pixel Radius примерно на 25.
- Сделайте тень более прозрачной с помощью ползунка Непрозрачность .

Примечание.
- Вы также можете перейти к Слой> Стиль слоя> Тень (Photoshop) или Слой> Стиль слоя> Настройки стиля и выбрать Тень в меню Стили (Элементы).
- Настройте такие атрибуты, как Непрозрачность, Расстояние, Распространение и Размер , используя соответствующие ползунки.
- Отделите стиль Drop Shadow от элемента на New Layer , щелкнув правой кнопкой мыши и выбрав Create Layer (Photoshop) или через Layer > Layer Style > Create Layer (Elements.)
- Прикрепите изображение к элементу Frame , выбранному для создания фокуса .
См. также:
- Create Custom Clusters #3 для дальнейшего руководства по созданию реалистичных Cast Shadows.

3. Украсьте шаблон
Используйте расходные материалы DigitalART
aA , чтобы украсить оставшиеся маски в шаблоне FotoInspired.- Включите Видимость остальных слоев в шаблоне FotoInspired, щелкнув значок «глаз» рядом с каждым слоем.
- Clip Artsy Papers из Artplay Palettes к «фотомаскам» в шаблоне FotoInspired.
- Вы также можете использовать ArtsyKardz, размеры которых аналогичны маскам.
- Используйте различные украшения из наборов Artplay Palettes и MultiMedia , чтобы добавить Visual Interest на страницу цифрового скрапбукинга.
- Также рассмотрите возможность добавления WordART, Stitching, ArtsyTransfers и BrushSets.
Попробуйте это:
- Поместите элементы кружева или ленты под маски, чтобы создать Текстурную рамку для вашего цифрового дизайна для скрапбукинга.
- Наборы кистей Stamp Stain и Paint Style на новых слоях над фоновым слоем, чтобы «смягчить» художественность.
- Используйте Строчки и струны, чтобы представить Натяжение в виде прямых стихов органической линии.
- Спрячьте бирку или карточку За рамкой, чтобы привлечь внимание фотографа.
- Поверните WordART на 90 градусов, чтобы ввести вариант .
- Создайте группу украшений из 2 или более элементов, чтобы повысить визуальный интерес.
- Повторите использование кнопки, чтобы увеличить строку или столбец одинаковых элементов.
- Элементы перекрытия с «Размытие границ» линейного макета.
- Выровняйте элементы, чтобы создать Баланс и Контраст.
См. также:
- Принципы проектирования и свойства элементов
- Создание пользовательских кластеров элементов #1
Расходные материалы DigitalART
Полный список цифровых расходных материалов, используемых в этом художественном макете, см. здесь.
здесь.
Используйте шаблоны FotoInspired в качестве основы для искусного дизайна макета цифрового скрапбукинга или страницы фотокниги.
- Выберите и измените размер шаблона FotoInspired.
- Выберите кадр , чтобы создать фокус .
- Создайте Извлечение и примените объемную тень .
- Украсьте оставшиеся «фотомаски» с помощью расходных материалов aA DigitalART.
См. также:
- От начала до конца Видео FotoInspired
- Сбалансированный FotoInspired с принципами дизайна
- 13 способов использования шаблонов FotoInspired
- 5 способов создать точку фокусировки с помощью рамок
И ЕСЛИ ВАМ ПОНРАВИЛОСЬ ЭТО РУКОВОДСТВО по извлечению фокусных точек с помощью шаблонов FotoInspired, ПОПРОБУЙТЕ САМИ ТЕХНИКУ И ОТПРАВЬТЕ ВАШИ АРТИСТИЧЕСКИЕ РАБОТЫ В ANNAGALLERY.
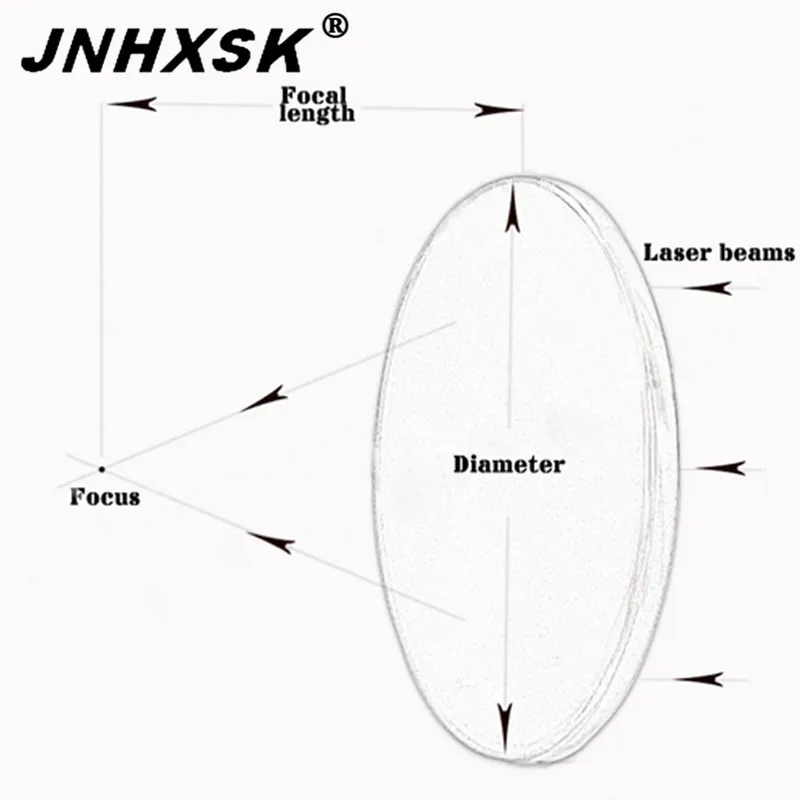
Пятница Механизм очага: длинная тектоническая тень Гималаев
Это было не самое крупное сейсмическое событие недели, но это мелкое (глубина 15 км) магнитудой 6.0, потрясший отдаленный юго-восточный угол Казахстана в понедельник, все еще привлек мое внимание.
Местоположение и (сдвиговый) механизм очага землетрясения магнитудой 6.0 в понедельник в горах Тянь-Шаня, юго-восток Казахстана.
Это землетрясение, расположенное в горах Тянь-Шаня, свидетельствует о глубоком и продолжающемся региональном воздействии столкновения Индии с Азией за последние 50 миллионов лет или около того. Это крушение континентов выбросило Гималаи, а за ними поднялось Тибетское плато; но GPS-измерения деформации для этого региона показывают, что даже на 500 километров дальше вглубь суши движение Индии на север все еще ощущается, толкая и сдавливая азиатскую кору, поднимая горы Тянь-Шаня — и вызывая это землетрясение.
GPS-измерения деформации, связанной со столкновением между Индией и Азией. Векторы движения относятся к недеформируемой внутренней части Азии. Источник: Ган и др., 2007 г.
Векторы движения относятся к недеформируемой внутренней части Азии. Источник: Ган и др., 2007 г.
Это хороший пример того, насколько непохожей на тектонику плит в строгом смысле может быть деформация континентальной коры: вместо больших жестких кусков коры, которые взаимодействуют только по краям, «граница плит» между Индией и Азией простирается на большое расстояние. путь в Азию. Вместо единой системы разломов у вас есть целый регион, постепенно поглощающий внутренний заряд Индии.Но это событие интересно по другой причине: описанный очаговый механизм предполагает, что разрыв произошел из-за сдвигового движения по разлому, либо правостороннего сдвига по разлому, ориентированному на северо-запад (северо-восточная сторона движется на юго-восток), либо левостороннего простирания. — подвижка по разлому юго-западной ориентации (северо-западная сторона смещается на юго-запад).
Две возможные интерпретации механизма очага. Правый сдвиг по разлому СЗ-ЮВ или левосторонний сдвиг по разлому ЮЗ-СВ.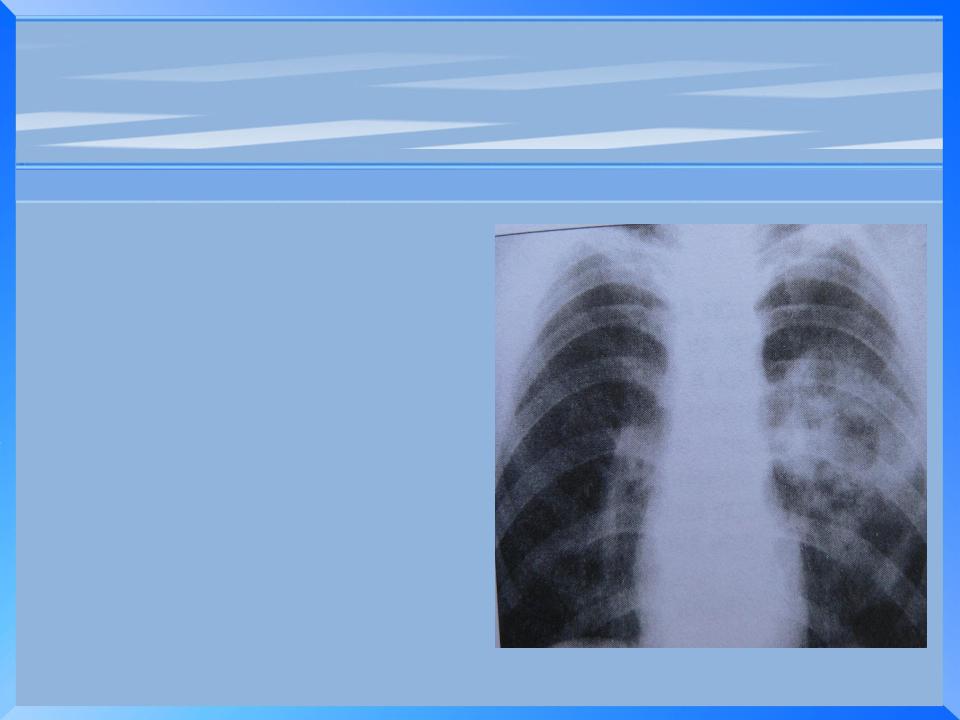
, возможно, немного удивителен, так как большинство землетрясений в этом регионе, по-видимому, происходит по надвиговым разломам, приспосабливающимся к сжатию с севера на юг.Эти разломы в основном следуют северо-восточному-юго-западному простиранию, что может свидетельствовать о том, что мы наблюдаем левосторонний сдвиг на одной из этих структур, как и в первом варианте выше. Однако это подразумевает своего рода боковую тектонику бегства в этой области, где вместо того, чтобы быть раздавленной и скомканной, чтобы освободить место для вторжения Индии, часть азиатской коры просто смещается с ее пути. Это ясно видно в восточных векторах GPS, наблюдаемых в восточном Тибете, но не особенно совместимо с тенденцией ЮЗ-СВ движения, полученного GPS, в Тянь-Шане.Однако оказывается, что примерно в 200 км к западу, по другую сторону озера Иссык-Куль, находится активный правый сдвиг северо-запад-юго-восточного простирания протяженностью 800 км – Талас-Ферганский разлом (ТФП). :
Поле скоростей GPS для Тянь-Шаня; векторы движения относительно стабильной Евразии. TFF=Таласо-Ферганский разлом. Источник: Зубович и др., 2010.
TFF=Таласо-Ферганский разлом. Источник: Зубович и др., 2010.
в понедельник могло произойти на меньшей, но аналогично ориентированной структуре к востоку от Талас-Ферганского разлома (это означает, что первая из двух предложенных выше возможностей верна).На расстоянии более 1000 км от основного фронта столкновения северное движение Индии вызывает деформацию; а на Тянь-Шане эта деформация воспринимается сдвиговыми разломами с севера на юг, а также надвигами с востока на запад. Почему это делается именно так? Я подозреваю, что это может быть как-то связано с тем, что мы находимся у восточного края Таримской котловины, которая считается прочным, жестким блоком, который не очень сильно деформируется. Основываясь на скоростях GPS на рисунке выше, кажется, что Таримский блок передает напряжение от Гималаев и Тибета дальше на север в Тянь-Шань, чем это возможно в более слабой коре за его краями.Сдвиговые разломы, такие как Таласско-Ферганский разлом и, возможно, разлом, разорвавшийся в понедельник, компенсируют эту разницу.