
Матрица фотоаппарата это: Матрица фотоаппарата — основа основ
Матрица фотокамеры служит для преобразования попадающего на нее с объектива светового потока в электрические сигналы, которые затем камера и преобразует в снимок. Делается это при помощи фотодатчиков, расположенных на матрице в большом количестве.
Что такое матрица фотоаппарата — это микросхема, состоящая из фотодатчиков, которые реагируют на свет.
Структура самой матрицы является дискретной, то есть состоящей из миллионов элементов (фотоэлементов), преобразующих свет.
Поэтому в характеристиках фотоаппарата как раз и указывается количество элементов матрицы, которое мы знаем как мегапиксели (Мп). 1 Мп = 1 миллиону элементов.
Именно от самой матрицы и зависит количество мегапикселей фотоаппарата, которое может принимать значение от 0.3 (для дешевых телефонных фотоаппаратов) до 10 и больше мегапикселей у современных фотоаппаратов. Например, 0,3 Мп это в переводе уже 300 тысяч фотоэлементов на поверхности матрицы.
- Физический размер
- Разрешение (мегапиксели)
- Светочувствительность
- Отношение сигнал-шум

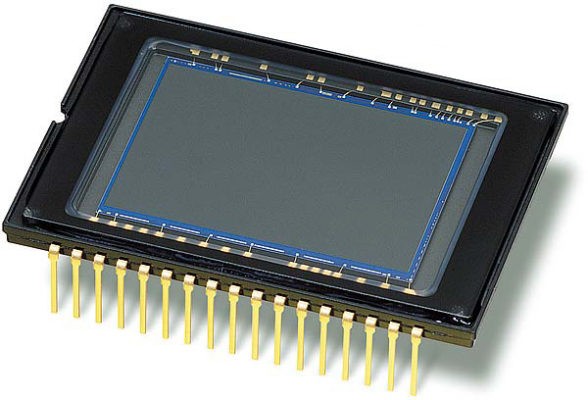
Внешний вид матрицы
Сама матрица фотоаппарата формирует черно белое изображение, поэтому для получения цветного изображения, элементы матрицы могут покрывать светофильтрами (красный, зеленый, синий). И если сохранять фотографию в формате JPEG и TIFF, то цвета пикселей фотоаппарат вычисляет сам, а при использовании формата RAW пиксели будут окрашены в один из трех цветов, что позволит обработать такой снимок на компьютере без потери качества.
Физический размер
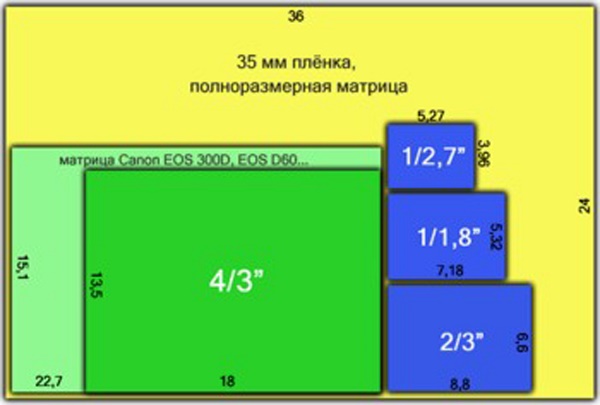
Еще одной характеристикой матрицы является размер. Обычно размер указывается как дробь в дюймах. Чем больше размер, тем меньше шума будет на фотографии и больше света регистрируется, а значит, больше оттенков получится.
Размер матрицы очень важный параметр всего фотоаппарата.
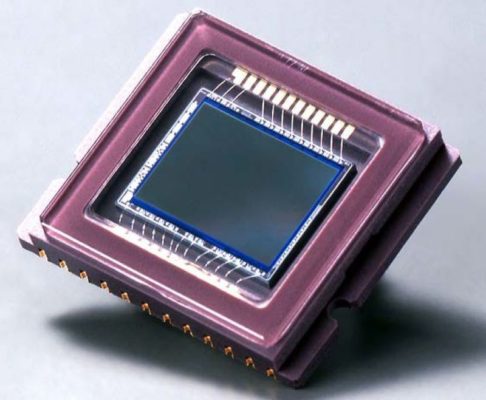
Разные размеры матрицы
Чувствительность и шумы
В фототехнике применительно к матрицам используется термин «эквивалентная» чувствительность. Происходит это потому, что настоящую чувствительность измеряют различными способами в зависимости от назначения матрицы, а применяя усиление сигнала и цифровую обработку, можно сильно изменить чувствительность в больших пределах.
Светочувствительность любого фотоматериала показывает способность этого материала преобразовывать электромагнитное воздействие света в электрический сигнал. То есть, сколько нужно света, что бы получить нормальный уровень электрического сигнала на выходе.
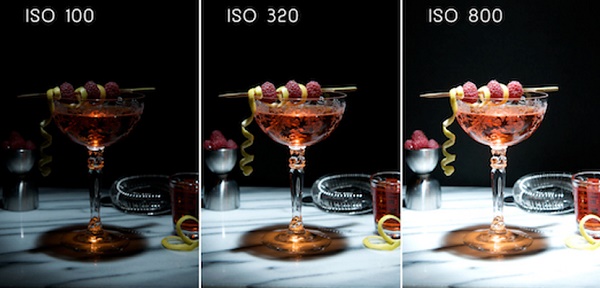
Чувствительность матрицы (ISO) влияет на съемки в темных местах. Чем больше чувствительность можно выставить в настройках, тем лучше будет качество снимков в темноте при нужных диафрагме и выдержке. Значение ISO может быть от нескольких десятков до нескольких десятков тысяч. Недостатком большой светочувствительности может быть проявление шума на фотографии в виде зернистости. Так же чувствительность участвует в настройке экспозиции.
Размер и количество пикселей
Размер матрицы и ее разрядность в мегапикселях связаны между собой такой зависимостью: чем меньше размер, тем должно быть и меньше мегапикселей. Иначе из-за близкого размещения фотоэлементов возникает эффект дифракции и может получиться эффект замыливания на фотографиях, то есть пропадет четкость на снимке.
Еще размер матрицы и ее разрешение определяют размер пикселя и соответственно динамический диапазон, который показывает возможность фотокамеры отличить самые темные оттенки от самых светлых и передать их на снимке.
Так же чем больше размер пикселя, тем больше отношение сигнал-шум ведь больший по размерам пиксель может собрать больше света и увеличивается уровень сигнала. Поэтому при одинаковом размере матрицы меньшее количество мегапикселей может быть даже полезнее для качества фотографии.
Чем больше физический размер пикселя (англ. pixel — picture element), тем больше он сможет собрать падающего на него света и тем больше будет соотношение сигнал-шум при заданной чувствительности. Можно и по-другому сказать: при заданном соотношении сигнал-шум будет выше чувствительность. Это означает, что можно увеличивать значение чувствительности при настройке экспозиции без боязни получить шумы на фотографии. Разумеется шумы появятся, только значение ISO, при котором это произойдет, будет разным для разных фотокамер. Поэтому зеркалки со своими большими матрицами по этим показателям сильно опережают компакты.
Размер пикселя зависит от физического размера матрицы и её разрешения. Размер пикселя влияет на фотографическую широту. Дополнительно о количестве мегапикселей.

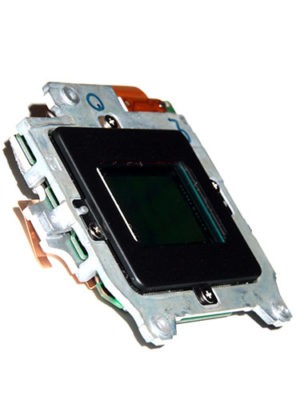
Матрица на плате
Разрешение
Разрешение матрицы зависит от количества используемых пикселей для формирования изображения. Объектив формирует поток света, а матрица разделяет его на пиксели. Но оптика объектива также имеет свое разрешение. И если разрешение объектива не достаточное, и он передает две светящиеся точки с разделением черной точкой как одну светящуюся, то точного разрешения фотоаппарата, которое зависит от значения Мп, можно и не заметить.
И максимальным это разрешение будет, когда разрешение объектива соответствует разрешению матрицы. Разрешение цифровых матриц зависит от размера пикселя, который может быть от 0,002 мм до 0,008 мм (2-8 мкм). Сегодня количество мегапикселей на фотосенсоре может дистигать значения 30 Мп.
Структура матрицы
Отношение сторон матрицы
В современных фотоаппаратах применяются матрицы с форматами 4:3, 3:2, 16:9. В любительских цифровых фотоаппаратах обычно используется формат 4:3. В зеркальных цифровых фотоаппаратах обычно применяют матрицы формата 3:2, если специально не оговорено применение формата 4:3. Формат 16:9 редко используется.
Тип матрицы
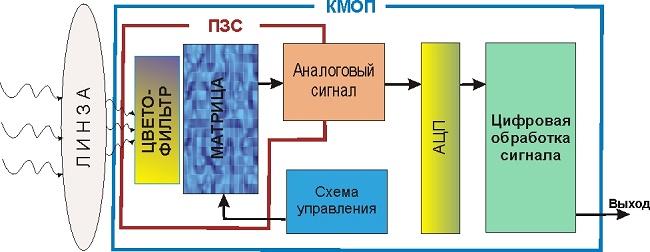
Раньше в основном использовались фотосенсоры на основе ПЗС (прибор зарядовой связи, по-английски CCD — Charge-Coupled Device). Эти матрицы состоят из светочувствительных светодиодов и используют технологию приборов с зарядовой связью (ПЗС). Успешно применяется и в наше время.
Но в 1993 году была реализована технология Activ Pixel Sensors. Её развитие привело к внедрению в 2008 году КМОП-матрицы (комплиментарный металл-оксид-полупроводник, по-английски CMOS — Complementary-symmetry/Metal-Oxide Semiconductor). При этой технологии возможна выборка отдельных пикселей, как в обычной памяти, а каждый пиксель снабжен усилителем. Так же матрицы на этой технологии могут иметь и автоматическую систему настройки времени экспонирования для каждого пикселя. Это позволяет увеличить фотографическую широту.
Фирма Panasonic создала свою матрицу Live-MOS-матрицу. Она работает на МОП технологии. Применяя такую матрицу можно получить живое изображение без перегрева и увеличения шумов.

Откуда берутся шумы на снимках и как их уменьшить.

Как можно почистить матрицу в зеркальном фотоаппарате.

Как размер матрицы влияет на качество снимков.
Добрый день, уважаемые читатели! Сегодня поговорим о том, что такое матрица в фотоаппарате. Вы, наверно, столько раз сталкивались с этим понятием во время покупки, но до сих пор никто так и не объяснил, какое значение она несёт? Давайте вместе разберемся.
Общие понятия
Если у вас съемный объектив на фотоаппарате, то ее очень легко увидеть, когда нет объектива. Вы снимаете объектив и глядите внутрь, и что вы видите? Да, вы видите матрицу — этот блестящий прямоугольник и является ею.

Матрица в фотоаппарате являет собою микросхему. Она, в свою очередь, состоит из светочувствительных элементов. Когда вы нажимаете кнопку спуска, то происходит фиксация световых элементов.
После этого они сохраняются в определённой последовательности. Простыми словами, вы получаете фотографию. Именно от этого элемента зависит, насколько хорошее изображение мы получим в результате съёмки.
От матрицы зависит и количество мегапикселей, которое будет иметь фотокамера. Минимальное значение составляет 0,3 мегапикселя. Максимум может достигать 20 и более. На что это влияет? На качество фотографии и на стоимость фотоаппарата – чем дороже, тем качественнее.
Свойства
Подходя к вопросу выбора матрицы, стоит обратить пристальное внимание на цену. На недорогом зеркальном фотоаппарате она будет среднего качества и выдавать посредственное изображение.
Поэтому следует сразу выделить достаточную сумму для покупки. Определяющими параметрами являются:
- Соотношение «сигнал-шум»
- Динамический диапазон
- Разрешение
- Уровень светочувствительности
- Размер

- Уровень «шума» фотографии. Большой размер обеспечивает меньший уровень шума.
- Насыщенность цвета и его глубина. Больший размер обеспечивает более насыщенные и яркие цвета. Такая матрица позволяет передать все оттенки цветов и переходы между ними, на что маленькая не способна.
- Широта динамического диапазона. Аналогично насыщенности: больше — лучше.
Виды
Сейчас на рынке представлены
• CCD
• CMOS
• APS-C
И на что нужно ориентироваться в этом вопросе, спросите вы? Всё просто: от её вида зависит качество фотографии. В основном, на рынке представлены CMOS-матрицы. Они обеспечивают низкий уровень шума.
APS-C такие типы ставят на кроп матрицы в Canon и Nikon фотоаппаратах.
CCD, в свою очередь, позволяет добиться более приятных для глаза цветов. Поэтому всё зависит от того, какую цель вы преследуете.

Чувствительность
Не менее важным параметром является и чувствительность матрицы. От неё зависит возможность фиксации предметов, которые плохо освещены. Но не стоит забывать, друзья, что высокая чувствительность увеличивает и уровень шумов на фотографии.
Низким уровнем принято считать значение в 50 единиц (по меркам ISO). При таком раскладе шумов не наблюдается при хорошей освещенности. Конечно, более профессиональные фотоаппараты способны делать фотографии и с высоким значением ISO. Я часто делаю фото и при ISO 2500 и, бывает 3000, и фотографии получаются очень качественные. Но это профессиональная техника.
Сигнал-шум
На любом фото присутствуют шумы. Их не избежать, дорогие читатели, помните об этом! Но можно уменьшить их количество. При отсутствии света фотодатчик всё равно фиксирует какое-то присутствие света.
Это и называют шумом. Способность фотоаппарата преодолеть этот шум и есть величина «сигнал-шум». Чтобы уменьшить количество шумов нужна матрица высокого разрешения. Это позволит максимально снизить уровень шума и уменьшить выдержку. Тогда и снимки получаются хорошими.
Разрешение
Почему-то многие при покупке обращают внимание исключительно на этот параметр. Не вводите себя в заблуждение! Чем больше разрешение, тем меньше пиксели. Поэтому фиксируется больше деталей и изображение, по идее, должно быть лучше. Но это не всегда так.
При большом разрешении матрицы увеличивается её нагрев. В результате этого уровень шумов на фотографии также повышается, а качество, напротив, падает. Хотя, на профессиональных моделях, допустим на Никоне, там 36 МП в фотоаппарате, и там нет этой проблемы, потому что техника профессиональная.
Кроп-фактор
Как вы знаете, есть еще кроп-фактор матрицы. Мы писали об этом недавно в статье. От этого так же зависит размер светочувствительного элемента. По опыту знаю, что в кропе нет ничего плохого. Все дело в том, что вы хотите получить в результате.

Если вы снимаете видео на фотоаппарат, то кроп сделает ваше видео более четким. У меня полнокадровая камера, и не всегда с резкостью все хорошо. И я специально купил камеру с маленькой матрицей, чтобы снимать видео. И видео стало лучше, в плане резкости.
Я знаю многие снимают видео и на полнокадровые фотоаппараты, потому что картинка получается красивее, лучше динамический диапазон. И здесь, опять же, нужно исходить из того, а что нужно вам. Подумайте серьезно над конечной вашей целью, и потом ищите инструменты, которые помогут вам ее решить.
Как почистить
Раз уж мы заговорили о святая святых фотоаппарата — матрице, то будет не лишним сказать и о том как ее чистить. Ведь, наверняка, вы замечали, что со временем на ваших снимках появляются какие-то непонятные точки, пятна, которые вы не можете убрать.
Так загрязняется матрица. На нее попадает пыль, когда вы снимаете объектив. И, конечно, ее нужно чистить время от времени. Я бы посоветовал никогда не чистить ее самому.
Может быть это от того, что у меня был горький опыт в этом. Я подумал, а что такого? Есть же наборы для чистки, и есть инструкции. Взял, да почистил.

Но не тут то было. Матрица — это действительно очень чувствительный элемент не только с точки зрения электроники, но и с физической точки зрения.
Ее нужно чистить только в профессиональных условиях, в специализированных центрах. Тогда вы будете на 100% уверены, что она снова станет идеально чистой. В домашних условиях, к сожалению, этого сделать нельзя.
Заключение
Теперь, дорогие читатели, я думаю, вам стало более понятно что такое матрица и для чего она нужна. Если статья пришлась вам по душе, то предлагаю подписаться на обновления блога.
Это позволит не пропустить другие интересные материалы. Поделившись с друзьями этой статьёй, вы принесёте им пользу. Изучайте основы фотографии, делайте красивые фотографии, приглашайте красивых девушек на свои фотосессии — это очень интересные процесс, который называется жизнь фотографа.
До новых встреч. С вами был Иван.
Ни один фотоаппарат не может обойтись без матрицы. Современные модели оснащаются ей практически поголовно. Так произошло в момент, когда цифровые аналоги начали вытеснять устаревшие пленочные технологии. Матрица фотоаппарата является одним из основных компонентов, без которых невозможна эксплуатация всего прибора в целом, ведь его роль если и не является ключевой, то, по крайней мере, может считаться одной из ведущих. Именно матрица отвечает за качество будущего снимка, цветопередачу, четкость, полноту кадра. Как и другие важные элементы фототехники, матрица обладает рядом основных параметров, на которые обычно принято ориентироваться при выборе той или иной модели.
Типы матриц
Матрица цифрового фотоаппарата – это, в первую очередь, микросхема. Она преобразует световые лучи, которые, преломившись в системе линз и зеркал, попадают на нее. В результате такого преображения получается электрический сигнал, который выводится в цифровом виде, образуя снимок. За весь этот процесс отвечают специальные фотодатчики, расположенные на самой плате. Чем больше количество датчиков, чувствительных к свету, тем больше разрешение, и, как следствие, качество конечного снимка.
Встречаются матрицы следующих типов.
- ПЗС – тип матрицы фотоаппарата, который дословно расшифровывается как прибор зарядовой связи. В английском варианте – Charge-Coupled Device. Весьма известная аббревиатура, которая, впрочем, не так часто встречается в наши дни. Многие используют приборы, в основе которых лежат светодиоды, имеющие высокую светочувствительность, созданные на основе ПЗС системы, но, несмотря на широкую распространенность, данный вид микросхем все больше вытесняется более современным.

- КМОП-матрица. Формат матрицы, введенный в эксплуатацию в 2008 году. Впрочем, история создания данного формата уходит корнями в далекий 93-й, когда впервые была опробована технология APS. КМОП-матрица – это комплиментарный металл-оксид-полупроводник. Данная технология позволяет производить выборку отдельного пикселя почти так же, как и в стандартной системе памяти, к тому же, каждый пиксель оснащается дополнительным усилителем. Поскольку данная система является более современной, она зачастую оснащается автоматической подстройкой времени экспонирования каждого пикселя по отдельности. Данное улучшение позволяет получить полный кадр без потери боковых границ, а так же без потери верха и низа кадра. Полноразмерная матрица чаще всего бывает выполнена по технологии КМОП.
- Существует еще один тип матрицы – Live-MOS-матрица. Ее выпустила фирма «Панасоник». Данная микросхема функционирует при помощи технологии, в основе которых лежит МОП. МОП-матрица позволяет делать качественные профессиональные снимки без высокого уровня шума, а также исключает перегрев.
Физический размер матрицы
Размер матрицы фотоаппарата – одна из ее важнейших характеристик. Как правило, его указывают в дюймах в виде дроби. Больший размер подразумевает меньшее количество шумов на конечном снимке. К тому же, чем больше физический размер, тем больше световых лучей способна зарегистрировать матрица. Объем и количество лучей напрямую влияют на качество передачи оттенков и полутонов.
Кроп-фактор — это соотношение размеров кадра пленочного фотоаппарата 35 мм к размерам матрицы цифрового фотоаппарата. Все дело в том, что процесс создания цифровой матрицы довольно дорогостоящий, и поэтому производители постарались максимально сократить ее размер.
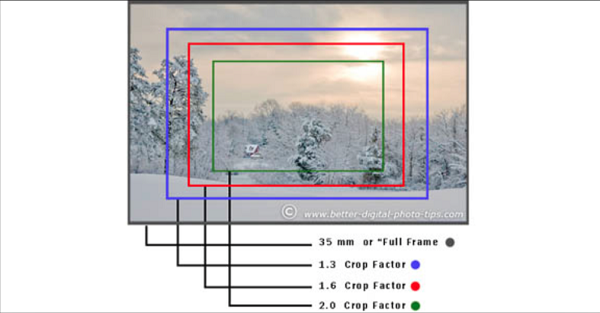
Если сравнить фото, сделанное с одним объективом на фотоаппарате с полнокадровой матрицей и фотоаппарате с «кропнутой» матрицей, то в первом случае угол охвата будет больше, и само изображение шире. Получается, что кропнутая матрица обрезает готовую картинку, отсюда и пошло такое название – кроп от англ. crop (резать).
Чаще всего кроп-фактор используют для замера наиболее точного расстояния фокуса у объектива, устанавливая его на различные приборы. Здесь вступает в игру такое понятие, как эквивалентное фокусное расстояние (ЭФР), которое вычисляется путем умножения фокусного расстояния (ФР) на кроп-фактор. Так, объектив с полнокадровой матрицей (кроп=1) и объективом с ФР 50 мм зафиксирует такое же по размерам изображение, как и кропнутая матрица 1,6 с объективом с ФР 30 мм. В этом случае можно сказать, что ЭФР у этих объективов одинаковое. Ниже приведена таблица, в которой можно провести сравнение, как меняется ЭФР в зависимости от кроп-фактора.
Количество мегапикселей и разрешение матрицы
Матрица сама по себе является дискретной. Она состоит более чем из миллиона элементов, которые и преобразовывают световой поток, идущий от линз. В характеристике каждой модели фотоаппарата можно отыскать такой параметр матричной платы как количество светочувствительных элементов или разрешение матрицы, измеряемое в мегапикселях.
Один мегапиксель равен одному миллиону светочувствительных датчиков, улавливающих преломленные в линзах лучи. Разумеется, чем этот параметр будет больше, тем лучший снимок получится сделать.
Правда, здесь есть и обратная зависимость. Если физический размер матрицы меньше, то и количество мегапикселей должно быть пропорционально меньше, в противном случае не удастся избежать эффекта дифракции: фотографии будут замыленными, без четкости.
Чем больше размер пикселя, тем больше он способен зафиксировать лучей, падающих на него. Размер пикселей напрямую связан с размерами матрицы, и влияет, в основном, на широту кадра. Чем больше количество мегапикселей с правильным соотношением размеров матрицы, тем больше лучей света смогу уловить датчики. Количество зафиксированных лучей напрямую влияет на исходные параметры преобразуемого материала: резкость, цветность, объем, контрастность, фокус.
Таким образом, разрешение фотокамеры влияет на качество снимка. Зависимость разрешения от объема использующихся пикселей очевидна. В объективе при помощи сложной расстановки оптических элементов формируется необходимый световой поток, который потом матрица поделит на пиксели. Оптические приборы тоже обладают собственным разрешением. Более того, если разрешение объектива достаточно мало, а передача двух светящихся точек, разделяемых одной темной, происходит как единого целого, то разрешение будет не столь отчетливо выделяться. Происходит это именно из-за прямой зависимости и привязки к числу мегапикселей.
Важно: на качественный снимок влияет как параметр разрешения матрицы, так и разрешение оптики объектива. Измеряется оно количество линий на 1 мм. Своего максимального значения разрешение достигает, когда оба показателя — и матрица, и объектив — соответствуют друг другу.
Если говорить о разрешении современных цифровых микросхем, то оно складывается из размера пикселя (от 2 до 8 мкм). На сегодняшний день на рынке представлены модели с показателями до 30 мп.
Светочувствительность
В фотоаппаратах по отношению к матрице принято использовать термин эквивалентной чувствительности. Связано это с тем, что подлинную чувствительность можно измерять различными способами в зависимости от множества параметров матрицы. Зато, применив усиление сигнала и цифровую обработку, пользователь может обнаружить высокие пределы чувствительности.
Параметры светочувствительности демонстрируют возможность исходного материала преобразовываться из электромагнитных воздействий потока света в электрический двоичный сигнал. Проще говоря, показывать, сколько требуется света для получения объективного уровня электрического импульса на выходе.
Параметр чувствительности (ISO) чаще всего используется фотографами для демонстрации возможности съемки в условиях плохого освещения. Увеличение чувствительности в параметрах прибора позволяет улучшить качество конечного снимка при необходимом значении диафрагмы и выдержки. ISO может достигать значения от нескольких десятков до тысяч и десятков тысяч единиц. Негативной стороной высоких значений светочувствительности является появление «шумов», которые проявляются в виде эффекта зернистости кадра.
Как проводить чистку матрицы в домашних условиях
Битые пиксели не всегда могут быть таковыми на самом деле. В действительности, когда происходит смена объектива, на матрицу могут попасть частицы мусора, вызывающие эффект «битого пикселя». Чистка матрицы фотоаппарата нужна для профилактики этого эффекта, а также для более комфортной работы с прибором.
Со временем, в особенности, если устройство эксплуатируется подолгу в различных погодных условиях, матрица может покрыться слоем пыли. При нарушении герметичности в области крепления объектива на поверхность может попасть небольшое количество влаги, что тоже может негативно сказаться на качестве кадра. Чистку можно доверить профессионалам из сервисного центра, а можно провести и самостоятельно, в домашних условиях.
Важно не забывать, что помещение, в котором будет происходить процедура, должно быть как можно менее пыльным, без сильных сквозняков. Прежде чем приступать к самой процедуре, необходимо убедиться, что аккумуляторная батарея заряжена.
Первый и самый простой способ очистки стеклянной поверхности кремниевой пластины микросхемы – сдувание пыли. Для этого следует использовать самую обычную грушу для чистки объективов, она продается в любом крупном магазине бытовой техники. К сожалению, использование груши помогает только при снятии легкого налета небольших песчинок пыли. Для более крупных частиц, которые могли прилипнуть к поверхности, может потребоваться что-то более основательное.

Если груша не помогла справиться с пятнами на матрице, можно попробовать использовать специальный набор для очистки стеклянной поверхности. Стоит он несколько дороже, но эффективность очистки значительно выше.
- Первый пункт в очистке – использование специального пылесоса. Его сборка не занимает много времени и детально описана в инструкции к набору. На конце устройства находится мягкий наконечник, так что повреждение прибора во время работы исключено. Лучше всего будет прочистить при помощи пылесоса не только стеклянную поверхность, но и все скрытые полости, доступные для чистки.
- После уборки при помощи пылесоса можно начинать влажную уборку. Она осуществляется при помощи специальных щеточек, одна из которых влажная, другая сухая. Этот вид уборки нужен для пылинок, которые, будучи мокрыми, попали на поверхность стекла, и, высохнув, прикрепились к нему, создав эффект «битого пикселя». Влажная щетка пропитана специальным раствором, который эффективно удаляет засохшие песчинки и пылинки, не оставляя пятен и разводов. Необходимо проводить по стеклу плавными аккуратными движениями, лишь слегка нажимая на саму щетку. Оставшаяся влага довольно быстро испарится сама. Даже если после влажной уборки на стекле остается пара капель, то они прекрасно удаляются сухой щеточкой (кисточкой).
- Третий этап – финальный, проводим сухой щеточкой по матрице и убеждаемся, что она чистая.


После очистки можно попробовать сделать тестовый снимок, чтобы убедиться, что процедура прошла успешно. Для этого необходимо закрыть диафрагму до максимального значения и сделать снимок чистого белого листа, приведя объектив в состояние полной расфокусировки. Затем сравнить качество снимков до и после.
Почистить матрицу зеркального фотоаппарата довольно просто, для этого не требуется каких-то глубоких знаний или большого опыта, достаточно желания, немного терпения и знания базовых принципов очистки высокоточной оптической техники.
Заключение
Матрица фотоаппарата является важнейшей деталью любой современной зеркалки. Без нее невозможно сделать снимок, а от ее параметров зависит дальнейшее использование устройства. Если параметры матрицы выбраны неправильно, фотоаппарат не будет оптимально справляться со своими задачами. Матрица не требует какого-то дополнительного ухода, кроме периодической чистки стеклянной поверхности.
Следует отметить, что светочувствительные датчики очень хрупкие и плохо переживают падение прибора даже с небольшой высоты, поэтому эксплуатировать фотоаппарат рекомендуется с максимальной осторожностью и аккуратностью.
Матрица фотоаппарата
Никого сейчас не удивишь цифровой фото камерой, каждая из которых наделена матрицей фотоаппарата. Что такое матрица фотоаппарата, почему ее название матрица цифрового фотоаппарата, какие ее функции.
Почти два столетия прошло с тех пор, как был создан первый прототип фотоаппарата. Принцип работы фотокамеры остался прежним: попадание светового потока через объектив и фиксация на светочувствительном элементе. Ранее использовались пленочные элементы с свойственной им химической реакцией. Новая эра фотоаппаратов преподнесла нам цифровые фотокамеры.
Матрица фотоаппарата, а точнее матрица цифрового фотоаппарата — это электронная схема, состоящая из миллионов крошечных светочувствительных диодов, которые реагируют на световой поток, попадающий на них. Один такой светодиод матрицы цифрового фотоаппарата приносит вашему изображению ровно один пиксель.
Теперь представьте себе матрицу фотоаппарата, передающую 12 миллионов пикселей. Сложно? Вовсе нет: 12 мегапикселей — это площадь матрицы в пикселях. К примеру, если соотношение сторон матрицы 3:4, то на матрице цифрового фотоаппарата будет располагаться 3 тысячи пикселей в столбце и таких столбцов 4 тысячи.
Как выглядит матрица фотоаппарата. Какой физический размер матрицы фотоаппарата?
Особенность электроники матрицы цифрового фотоаппарата заключается в накоплении эклектического заряда в зависимости от количества попадающего света на матрицу фотоаппарата. Если происходит переизбыток энергии на пикселе или группе пикселей матрицы цифрового фотоаппарата, то эта энергия начинает переходить на соседние пиксели. В результате, когда фотографируете солнце вы получаете световой пучок разной окружности.
Важно знать: чем качественнее и дороже матрица, а главное, чем больше физический размер матрицы цифрового фотоаппарата, тем больше расстояние между её пикселями, тем менее заметен эффект распределения энергии на соседние пиксели.
Количество пикселей на матрице должно увеличиваться с увеличением качества и\или размера матрицы цифрового фотоаппарата. Иначе, новые пиксели теряют свою эффективность. Размер матрицы цифрового фотоаппарата — важная характеристика!
Для начала, что это такое. Раньше, в эпоху пленочных фотоаппаратов с этим было просто — вместо матрицы была светочувствительная пленка-негатив. Стандарт был 35мм (физический размер 24×36 мм). В современном же цифровом фотоаппарате вместо пленки устанавливается светочувствительная матрица — интегральная микросхема, состоящая из светочувствительных элементов (фотодиодов). Матрица предназначена для преобразования спроецированного на нее оптического изображения в поток цифровых данных. Фотоматрица оцифровывает («нарезает» на пиксели) то изображение, которое формируется объективом фотоаппарата.
Существуют несколько типов матриц, применяемых в цифровых камерах, основные из которых CCD и CMOS. CCD-матрица обеспечивает лучшие показатели при съемке динамичных и мелких объектов, у нее низкий уровень шума и высокий коэффициент заполнения. CMOS-матрица же используется в изделиях, для которых критична конечная стоимость, благодаря своей недорогой стоимости, низкого энергопотребления.
Итак, физический размер матрицы. Необходимо отметить, что физический размер матрицы — одна из важнейших характеристик фотоаппарата, влияющих на качество получаемых фотографий. Физический размер — это ее геометрический размер (длина и ширина в миллиметрах). Однако чаще всего размеры фотосенсоров чаще всего обозначают в виде дробных частей дюйма, например 1 / 2.5″. Так как эта величина обратная, то и соответственно, размер матрицы больше, если число после дроби меньше. Для примера, приведем соотношение наиболее часто используемых матриц:
| Диагональ матрицы | Геометрический размер |
| 1 / 3.2″ | 3.4 х 4.5мм |
| 1 / 2.7″ | 4.0 х 5.4мм |
| 1 / 2.5″ | 4.3 х 5.8мм |
| 1 / 2.3″ | 4.6 х 6.2мм |
| 1 / 1.8″ | 5.3 х 7.2мм |
| 2 / 3″ | 6.6×8.8мм |
| 1″ | 9.6 х 12.8мм |
| APS-C (матрица, в 1.6 раза меньше APS) | 15 х 23мм |
| полный формат (APS) | 24 х 36мм |
Проще ориентироваться не на размер матрицы в обратных значениях дюйма, а на кроп-фактор. Кроп-фактор — это коэффициент, показывающий во сколько раз матрица фотоаппарата меньше полного формата. Например, для наиболее распространенного размера матрицы современных мыльниц 1 / 2.3″ кроп-фактор составит 5.62, т.е. матрица в 5.62 раза меньше полноформатной.
Размер матрицы влияет на количество цифрового шума, передаваемого вместе с основным сигналом на матрицу. Наличие цифрового шума, в свою очередь, придает фотографии неестественный вид и создается впечатление, что на фотографии наложена матовая пленка. Чем больше физический размер матрицы, тем больше ее площадь и тем больше света на нее попадает, в результате чего полезный сигнал матрицы будет сильнее и соотношение сигнал / шум будет лучше. Это позволяет получать более яркую, качественную картинку с естественными цветами.
Ещё совсем недавно фотоаппараты были плёночными и процедура печати фотокарточек была увлекательным, хотя кропотливым и трудоёмким процессом. С тех пор прошло не особо много времени, но устройства стали совершенно иными. Вместо плёнки, они обзавелись съёмными носителями данных, а за формирование изображения стала отвечать матрица. Давайте попробуем разобраться, что такое матрица и где она располагается в современных фотографических аппаратах.

Матрица фотоаппарата — что это и где находится
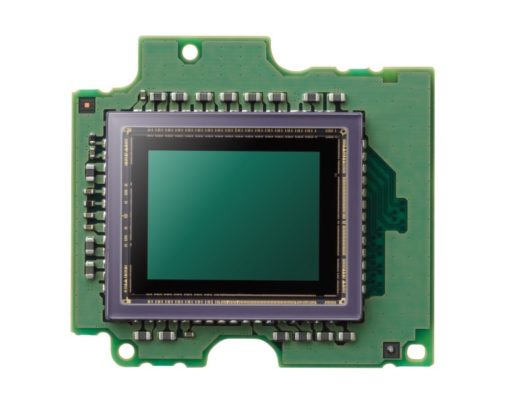
Как уже говорилось выше, основной элемент любого цифрового фотоаппарата — матрица. Именно она формирует изображение. Её очень часто в литературе ещё называют сенсором либо датчиком. С технической стороны — это обычная микросхема, состоящая из множества фотодиодов, чувствительных к свету. Эти светодиоды создают электрический сигнал, величина которого напрямую зависит от интенсивности света, падающего на них. Электрические сигналы затем преобразуются в цифровые, посредством отдельного центрального процессора или процессора, внедрённого в матрицу.

Матрица улавливает падающий на неё свет и преобразует его в битовую последовательность. Другими словами, в набор нулей и единичек. Уже из них создаётся изображение.
Внешне устройство выглядит как на фотографии.
Типы матриц фотоаппаратов — какая лучше?
Так как матрица, это основная деталь в устройстве фотоаппарата, стало быть, от её типа и качества зависит уровень получаемой фотографии. В современных фотоаппаратах встречаются следующие типы устройств:
- ПЗС;
- КМОП;
- Live-MOS;
- Super CCD;
- QuantumFilm.
ПЗС матрица
Это аналоговая микросхема, которая сделана из кремниевых диодов.
Этот сенсор изначально создавался для применения в:
- камерах мобильных аппаратов;
- фотоаппаратах;
- медицинском оборудовании.
Плюсы:
- низкий уровень шума в полученных снимках;
- естественные и неискажённые цвета;
- простота производства;
- не греются при длительном использовании.
Основной её минус — большое потребление энергии. А также большие размеры, из-за чего устройства, в которых она применяется — достаточно массивны.
КМОП матрица
Работа этого типа устройства основывается на CMOS-технологии. Этот вид применяется уже не первый год, но так и не устарел.
Используют их, чаще всего, в системах видеонаблюдения. Каждый год выпускаются новые варианты сенсоров, основанные на технологии КМОП.
Среди положительных свойств:
- малое потребление энергии;
- низкая цена;
- небольшие габариты микросхемы;
- применяя разные усилители, можно увеличить чувствительность;
- дешёвое и простое.
Отрицательные свойства:
- довольно низкое разрешение;
- большая шумность снимков;
- прибор сильно нагревается.
Live-MOS
Разработчик этого вида датчиков фирма Panasonic — они же и применяют их в своих устройствах. В основу работы положена всё та же КМОП-технология, но доработанная, чтобы потреблять меньше энергии.
Основной «фишкой» является получение изображения на жидкокристаллическом экране в режиме реального времени. Другими словами, мы видим то, что получим в итоге. При этом нет излишнего нагрева и больших шумов.
Положительные качества:
- небольшие затраты энергии;
- малые габариты камеры;
- фотограф сам может усилить цвета, отрегулировав тем самым передачу цветов.
Отрицательные качества:
- возможно появление шума на снимках. Он возникает потому, что каждый пиксель имеет собственную электрическую цепь и свою зависимость экспозиции и выходного заряда;
- электрокомпоненты помимо шума влияют и на нагревание устройства. Часто возникает перегрев аппаратуры.
Super CCD
Этот вариант используется в аппаратах от компании Fujifilm. Матрица оснащена пикселями зелёного цвета, которые имеют различные размеры. За счёт этого получается большая фотографическая широта. В отличие от других типов матриц, в этой модели пиксели в виде восьмиугольников, а не прямоугольные.
Положительной и характерной особенность этого типа матрицы является наличие лишь вертикальных или горизонтальных линий в готовом изображении, матрица обладает высокой чувствительностью, широкий динамический диапазон.
Отрицательное свойство этой модели то, что она пропускает идущие диагонально линии. А ведь именно такие линии и составляют все объекты.
QuantumFilm
В основе этой модели лежат квантовые точки.
Это очень удивительная и необычная технология. Она позволяет захватывать свет почти на сто процентов. Благодаря чему имеется возможность получить отличную чувствительность к свету, даже в условиях недостатка света.
О модели:
- низкая стоимость;
- небольшой размер датчика;
- ширина динамического диапазона этой матрица, практически в два раза больше других моделей. Это также достигается использованием квантовых точек;
- материал, из которого изготавливаются квантовые точки, одновременно выступает линзой и усилителем.
Матрица фотоаппарата. Типы и характеристики.
Матрица фотоаппарата самая важная составляющая часть любой камеры. Именно она ответственна за создание изображения, после поступления на ее поверхность светового потока. Если описать матрицу научными словами, то это будет звучать следующим образом, микросхема состоящая из светочувствительных элементов, фотодиодов. Посмотрите следующий снимок, где показано месторасположение матрицы в блоке самого фотоаппарата («тушке»).
Матрица фотоаппарата самым прямым образом влияет на качество итогового изображения, что в сочетании с профессиональным фотообъективом приводит к точной и полной передаче всех деталей реальности.
1. Размер матрицы
2. Количество пикселей
3. Светочувствительность
Теперь подробнее о каждой из указанных характеристик.
Физический размер матрицы, т.е соотношение длины и ширины, измеряемой в миллиметрах, одна из самых важных характеристик матрицы. Чем больше размер, тем лучше будет качество фотографии. Почему? Большая по размеру матрицу, получает больше света, что в свою очередь связано с фактором ISO/светочувствительности. Даже при высоких значения ISO, количество шумов на фотоснимке, сделанном на профессиональную камеру с большой матрицей, будет минимальное. Чего нельзя сказать о фотоснимке сделанном, при участии маленькой матрицы.
Далее на картинке вы можете изучить самые распространенные размера матрицы в соотношение к диагонали.
Количество пикселей в матрице фотоаппарата влияет на размер изображения. Все профессиональные зеркальные фотокамеры снабжены матрицей с большим числом мегапикселей. Как результат, вы сможете распечатать большую фотографию, плакат или постер и все цвета и детали при этом, будут переданы в наилучшем качестве.
Типы матриц фотоаппарата.
По применяемой технологии матрицы бывают нескольких типов, но самые популярные из них:
— ПЗС (CCD — Charge Coupled Device). Данный тип матрицы выпускается практически всеми фирмами производителями фотокамер (Nikon, Canon, Sony и др.). Один из очевидных плюсов высокая чувствительность и маленький уровень шумов, что положительно влияет на качество фотографии, но высокое энергопотребление.
— КМПО (CMOS — Complementary Metal Oxide Semiconductor). Основные плюсы данного вида матрицы низкое энергопотребление и высокое быстродействие. В наши дни данный вид матрицы самый распространенный.
Далее, для примера я привела небольшую сравнительную характеристику фотокамер двух фирм лидеров производителей Nikon и Canon.
Профессиональные фотокамеры Nikon D5 (21,33 Мп), D810a (37,09 Мп) имеют КМОП-матрицу размером 35,9 x 24,0 мм. Компактные фотокамеры, например Nikon CoolPix L340, L2750 снабжены ПЗС матрицей.
Профессиональные фотокамеры Canon EOS – 1D X II Mark (21,5 Мп), EOS 5DS R (50,6 Мп) имеют CMOS матрицу. У Canon даже такие компактные камеры как PowerShot SX720 HS, SX 620HS также работают на КМПО матрице.
На этом я заканчиваю свою статью под названием «Матрица Фотоаппарата», дальше будет еще больше полезных и интересных статей. Подписывайтесь на обновления моего блога, и вы будете первыми получать новые статьи.
Матрица цифрового фотоаппарата. Принцип работы.
Продолжаю начатый в предыдущей публикации разговор об устройстве цифрового фотоаппарата.
Одним из главных элементов цифрового фотоаппарата, отличающих его от фотоаппаратов пленочных является светочувствительный элемент, так называемый ЭОП или светочувствительная матрица цифрового фотоаппарата. О матрицах фотоаппаратов уже говорилось ранее, теперь же рассмотрим несколько подробнее устройство и принцип работы матрицы, хотя и достаточно поверхностно, чтобы не слишком утомлять читателя.
В настоящее время большинство цифровых фотоаппаратов оснащены ПЗС-матрицами.
Рассмотрим в общих чертах устройство ПЗС- матрицы.
Полупроводники, как известно, делятся на полупроводники n-типа и p-типа. В полупроводнике n-типа имеется избыток свободных электронов, а в полупроводнике p-типа избыток положительных зарядов, «дырок» (а следовательно недостаток электронов). На взаимодействии таких двух типов полупроводников и основана вся микроэлектроника.
Так вот, элемент ПЗС-матрицы цифрового фотоаппарата устроен следующим образом. См. Рис.1:
Рис.1
Если не вдаваться в подробности, то ПЗС-элемент или прибор с зарядовой связью, в английской транскрипции: charge-coupled-device – CCD, представляет собой МДП (металл-диэлектрик-полупроводник) конденсатор. Он состоит из подложки p-типа — слоя кремния, изолятора из двуокиси кремния и пластин-электродов. При подаче на один из электродов положительного потенциала, под ним образуется зона обедненная основными носителями — дырками, т. к. они оттесняются электрическим полем от электрода вглубь подложки. Таким образом под данным электродом образуется потенциальная яма, т. е. энергетическая зона благоприятная для перемещения в нее неосновных носителей – электронов. В этой яме накапливается отрицательный заряд. Он может храниться в данной яме достаточно долго из-за отсутствия в ней дырок и, следовательно, причин для рекомбинации электронов.
В светочувствительных матрицах электродами являются пленки поликристаллического кремния, прозрачного в видимой области спектра.
Рис.2
Фотоны падающего на матрицу света попадают в кремниевую подложку, образуя в ней пару дырка-электрон. Дырки, как сказано выше смещаются вглубь подложки, а электроны накапливаются в потенциальной яме.
Накопившийся заряд пропорционален количеству фотонов падающих на элемент, т. е. интенсивности светового потока. Таким образом на матрице создается зарядовый рельеф, соответствующий оптическому изображению.
Далее используется свойство ПЗС-элементов перемещать заряды под действием подаваемых тактовыми импульсами потенциалов на электроды смещения.
Перемещение зарядов в ПЗС-матрице.
В каждом ПЗС-элементе имеется несколько электродов, на которые подаются разные потенциалы.
Рис.3.
При подаче на соседний электрод (см. рис. 3) потенциала, большего, чем на данном электроде, под ним образуется более глубокая потенциальная яма, в которую перемещается заряд из первой потенциальной ямы. Таким образом заряд может перемещаться из одной ПЗС-ячейки в другую. Показанный на рис.3 ПЗС-элемент называется трехфазным, бывают еще и 4-х фазные элементы.
Рис.4. Схема работы трехфазного прибора с зарядовой связью – сдвигового регистра.
Для преобразования зарядов в импульсы тока (фототока) используются последовательные регистры сдвига (см. рис.4). Такой регистр сдвига и является строкой ПЗС-элементов. Амплитуда импульсов тока пропорциональна величине передаваемого заряда, и пропорциональна,таким образом, падающему световому потоку. Последовательность импульсов тока, образующихся при считывании последовательности зарядов, затем подается на вход усилителя.
Линейки близко расположенных друг к другу ПЗС-элементов объединяются в ПЗС-матрицу. Работа такой матрицы основывается на создании и передаче локального заряда в потенциальных ямах, создаваемых электрическим полем.
Рис.5.
Заряды всех ПЗС-элементов регистра синхронно перемещаются в соседние ПЗС-элементы. Заряд, который находился в последней ячейке, поступает на выход из регистра, а затем подается на вход усилителя.
На вход последовательного регистра сдвига подаются заряды перпендикулярно расположенных регистров сдвига, которые в совокупности называются параллельным регистром сдвига. Параллельный и последовательный регистры сдвига и составляют ПЗС-матрицу (см. рис.4).
Перпендикулярные к последовательному регистру сдвиговые регистры носят название столбцов.
Перемещение зарядов параллельного регистра строго синхронизовано. Все заряды одной строки смещаются одновременно в соседнюю. Заряды последней строки попадают в последовательный регистр. Таким образом за один рабочий цикл строка зарядов из параллельного регистра попадает на вход последовательного, освобождая место для вновь образуемых зарядов.
Работа последовательного и параллельного регистров синхронизуется тактовым генератором. В состав матрицы цифрового фотоаппарата также входит микросхема, подающая потенциалы на электроды переноса регистров и управляющая их работой.
ЭОП такого типа носит название полнокадровой матрицы (full-frame CCD-matrix). Для его работы необходимо наличие светонепроницаемой крышки, которая сначала открывает ЭОП для экспонирования светом, затем, когда на него попало количество фотонов, необходимое для накопления достаточного заряда в элементах матрицы, закрывает его от света. Такая крышка является механическим затвором, как в пленочных фотоаппаратах. Отсутствие такого затвора приводит к тому, что при перемещении зарядов в сдвиговом регистре ячейки продолжают облучаться светом, добавляя к заряду каждого пиксела лишние электроны, не соответствующие световому потоку данной точки. Это приводит к «размазыванию» заряда, соответственно к искажению получаемого изображения.
Скорость работы такого ЭОПа зависит не только от скорости считывания как с параллельного , так и с последовательного регистров, но еще и наличием механического затвора, который влияет на длительность интервала между экспонированием отдельных кадров.
С целью уменьшения интервала между экспонированием отдельных кадров была разработана матрица с буферизацией кадра.
Здесь была рассмотрена физика восприятия света светочувствительным элементом ПЗС-матрицы, но ничего не говорится о цвете. В принципе ПЗС-элемент воспринимает все цвета почти одинаково (есть некоторая спектральная чувствительность, но об этом позже). Каким же образом с помощью Пзс-элементов создается цветное изображение рассматривается далее.
Предлагаю вам на десерт ролик с изумительной музыкой, в котором представлены армянский дудук и скрипка:
Поделиться в соц. сетях
Об авторе
Я живу в г Новосибирске. Образование высшее — НГТУ, физикотехнический факультет. В настоящее время на пенсии. Семья: жена, две дочери, две внучки. Работал в последнее время в электронной промышленности в ОКБ по разработке и производству приборов ночного видения. Люблю музыку- классику, джаз, оперу, балет. Главное увлечение — любительская фотография.
13 августа 2013 г.

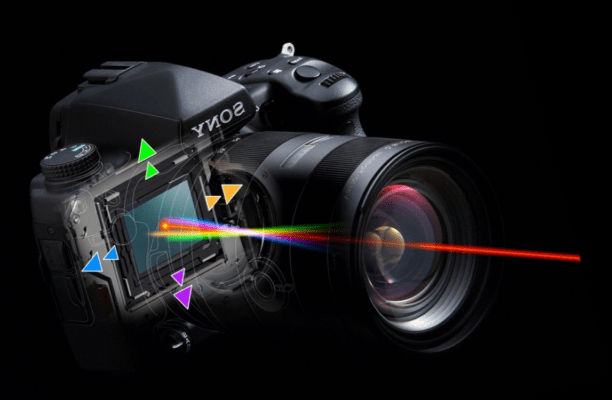
Сегодня мы изучим встроенную матрицу камеры в нашей третьей и последней главе трилогии «Рассеивание матрицы камеры». В первой статье мы узнали, как разбить полную матрицу камеры на внутренние и внешние матрицы и как правильно обрабатывать неопределенности, возникающие в этом процессе. Вторая статья более подробно рассмотрела внешнюю матрицу, рассматривая несколько различных интерпретаций ее трехмерных вращений и трансляций.Сегодня мы рассмотрим внутреннюю матрицу так же, рассмотрев две равнозначные интерпретации: как описание геометрии виртуальной камеры и последовательность простых двумерных преобразований. После этого вы увидите интерактивную демонстрацию, иллюстрирующую обе интерпретации.
Если вы не заинтересованы углубляться в теорию и просто хотите использовать собственную матрицу с OpenGL, ознакомьтесь со статьями Калиброванные камеры в OpenGL без glFrustum и Калиброванные камеры и gluPerspective.
Все эти статьи являются частью серии «Перспективная камера, интерактивный тур». Чтобы прочитать другие записи в серии, перейдите к оглавлению.
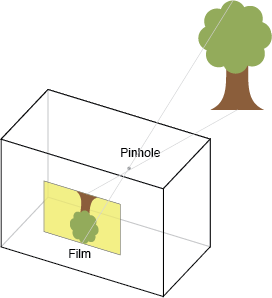
Собственная матрица преобразует 3D-координаты камеры в 2D-однородные координаты изображения. Эта перспективная проекция моделируется идеальной камерой-обскурой, показанной ниже.
Собственная матрица параметризована Хартли и Циссерманом как
\ [ К = \ левый ( \ begin {array} {c c c} f_x & s & x_0 \\ 0 & f_y & y_0 \\ 0 & 0 & 1 \\ \ {Конец массива} \право ) \]
Каждый внутренний параметр описывает геометрическое свойство камеры.Давайте рассмотрим каждое из этих свойств подробно.
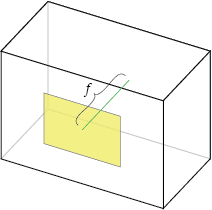
Фокусное расстояние, \ (f_x \), \ (f_y \)
Фокусное расстояние — это расстояние между точечным отверстием и пленкой (например, плоскость изображения). По причинам, которые мы обсудим позже, фокусное расстояние измеряется в пикселях. В настоящей камере-обскуре и \ (f_x \), и \ (f_y \) имеют одинаковое значение, что показано как \ (f \) ниже.
На практике \ (f_x \) и \ (f_y \) могут различаться по ряду причин:
- Недостатки в сенсоре цифровой камеры.
- Изображение было неравномерно масштабировано при последующей обработке.
- Объектив камеры вносит непреднамеренные искажения.
- Камера использует анаморфный формат, в котором объектив сжимает широкоэкранную сцену в датчик стандартного размера.
- Ошибки в калибровке камеры.
Во всех этих случаях полученное изображение имеет не квадратные пиксели.
Наличие двух разных фокусных расстояний не очень интуитивно понятно, поэтому некоторые тексты (например, Форсайт и Понсе) используют одно фокусное расстояние и «соотношение сторон», которое описывает величину отклонения от идеально квадратного пикселя.Такая параметризация хорошо отделяет геометрию камеры (то есть фокусное расстояние) от искажения (аспектного соотношения).
Смещение основной точки, \ (x_0 \), \ (y_0 \)
«Основная ось» камеры — это линия, перпендикулярная плоскости изображения, которая проходит через отверстие. Его сечение с плоскостью изображения называется «главной точкой», показанной ниже.
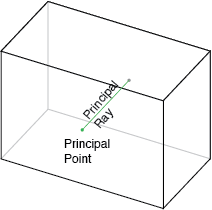
«Смещение главной точки» — это местоположение главной точки относительно происхождения фильма.Точное определение зависит от того, какое соглашение используется для определения местоположения источника; На рисунке ниже предполагается, что это в левом нижнем углу фильма.
Увеличение \ (x_0 \) сдвигает точечное отверстие вправо:
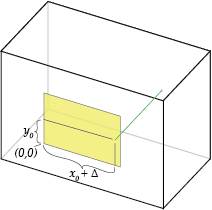
Это эквивалентно смещению пленки влево и оставлению точечного отверстия без изменений.
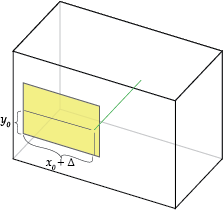
Обратите внимание, что поле, окружающее камеру, не имеет значения, имеет значение только положение точечного отверстия относительно пленки.
Skis Skew, \ (s \)
Перекос оси вызывает сдвиг в проецируемом изображении. Насколько я знаю, нет никакого аналога оси смещения настоящей камеры-обскуры, но, очевидно, некоторые процессы оцифровки могут вызвать ненулевой перекос. Мы рассмотрим перекос позже.
Прочие геометрические свойства
Фокусное расстояние и смещение главной точки представляют собой простые сдвиги пленки относительно точечного отверстия. Должны быть другие способы трансформировать камеру, верно? Как насчет поворота или масштабирования пленки?
Вращение пленки вокруг точечного отверстия эквивалентно вращению самой камеры, которая обрабатывается внешней матрицей.Вращение пленки вокруг любой другой неподвижной точки \ (x \) эквивалентно вращению вокруг точечного отверстия \ (P \), а затем переводу \ ((x-P) \).
Как насчет масштабирования? Должно быть очевидно, что удвоение всех размеров камеры (размер пленки и фокусное расстояние) не влияет на захваченную сцену. Если вместо этого вы удваиваете размер пленки и , а не фокусного расстояния, это эквивалентно удвоению обоих (без операции) и затем вдвое уменьшению фокусного расстояния. Таким образом, представление масштаба фильма явно было бы излишним; оно фиксируется фокусным расстоянием.
Фокусное расстояние — от пикселей до мировых единиц
Это обсуждение масштабирования камеры показывает, что существует бесконечное количество камер с точечным отверстием, которые производят одно и то же изображение. Внутренняя матрица касается только взаимосвязи между координатами камеры и координатами изображения, поэтому абсолютные размеры камеры не имеют значения. Использование пиксельных единиц для фокусного расстояния и смещения главной точки позволяет нам представлять относительные размеры камеры, а именно положение пленки относительно ее размера в пикселях.
Другой способ сказать, что внутреннее преобразование камеры является инвариантным к равномерному масштабированию геометрии камеры. Представляя размеры в пиксельных единицах, мы естественным образом фиксируем эту инвариантность.
Вы можете использовать похожие треугольники для преобразования пиксельных единиц в мировые единицы (например, мм), если вам известно хотя бы одно измерение камеры в мировых единицах. Например, если вы знаете, что пленка камеры (или цифровой датчик) имеет ширину \ (W \) в миллиметрах, а ширина изображения в пикселях равна \ (w \), вы можете преобразовать фокусное расстояние \ (f_x \) в мировые юниты, использующие:
\ [F_x = f_x \ frac {W} {w} \]
Другие параметры \ (f_y \), \ (x_0 \) и \ (y_0 \) можно преобразовать в их аналоги мировых единиц \ (F_y \), \ (X_0 \) и \ (Y_0 \), используя аналогичные уравнения:
\ [ \ BEGIN {массив} {} ссс F_y = f_y \ frac {H} {h} \ qquad X_0 = x_0 \ frac {W} {w} \ qquad Y_0 = y_0 \ frac {H} {h} \ {Конец массива} \]
Как мы уже говорили ранее, важно только расположение точечного отверстия и пленки, поэтому физическая коробка, окружающая камеру, не имеет значения.По этой причине многие обсуждения геометрии камеры используют более простое визуальное представление: усеченная камера.
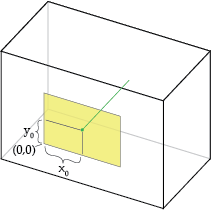
Видимая область камеры имеет форму пирамиды, и ее иногда называют «конусом видимости». Давайте добавим к нашей сцене несколько 3D-сфер и покажем, как они попадают в конус видимости, и создадим изображение.
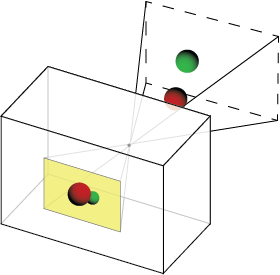
Так как «коробка» камеры не имеет значения, давайте ее удалим. Также обратите внимание, что изображение фильма изображает зеркальную версию реальности. Чтобы исправить это, мы будем использовать «виртуальный образ» вместо самого фильма.Виртуальное изображение имеет те же свойства, что и изображение на пленке, но в отличие от истинного изображения, виртуальное изображение появляется перед камерой, и проецируемое изображение раскладывается.
Обратите внимание, что положение и размер плоскости виртуального изображения являются произвольными — мы могли бы удвоить его размер, если бы мы также удвоили его расстояние от точечного отверстия.
После удаления истинного изображения у нас остаётся представление «усечённости» нашей камеры-обскуры.
Пинхол был заменен кончиком конуса видимости, и пленка теперь представлена плоскостью виртуального изображения.Мы будем использовать это представление для нашей демонстрации позже.
В предыдущих разделах мы интерпретировали наши входящие 3-векторы как координаты 3D-изображения, которые преобразуются в однородные координаты 2D-изображения. В качестве альтернативы, мы можем интерпретировать эти 3-вектора как двумерные однородные координаты, которые преобразуются в новый набор двумерных точек. Это дает нам новый взгляд на внутреннюю матрицу: последовательность двумерных аффинных преобразований.
Мы можем разложить собственную матрицу на последовательность преобразований сдвига, масштабирования и сдвига, соответствующих наклону оси, фокусному расстоянию и смещению главной точки соответственно:
\ [ \ Начать {} Align K & = \ left ( \ begin {array} {c c c} f_x & s & x_0 \\ 0 & f_y & y_0 \\ 0 & 0 & 1 \\ \ {Конец массива} \право ) \\ [0.5em] знак равно \ Underbrace { \осталось ( \ begin {array} {c c c} 1 & 0 & x_0 \\ 0 & 1 & y_0 \\ 0 & 0 & 1 \ {Конец массива} \право ) } _ \ text {2D Translation} \ раз \ Underbrace { \осталось ( \ begin {array} {c c c} f_x & 0 & 0 \\ 0 & f_y & 0 \\ 0 & 0 & 1 \ {Конец массива} \право ) } _ \ text {2D Scaling} \ раз \ Underbrace { \осталось ( \ begin {array} {c c c} 1 & s / f_x & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \ {Конец массива} \право ) } _ \ text {2D Shear} \ Конец {} Align \]
Эквивалентные места разложения сдвига после масштабирования :
\ [ \ Начать {} Align K & = \ Underbrace { \осталось ( \ begin {array} {c c c} 1 & 0 & x_0 \\ 0 & 1 & y_0 \\ 0 & 0 & 1 \ {Конец массива} \право ) } _ \ text {2D Translation} \ раз \ Underbrace { \осталось ( \ begin {array} {c c c} 1 & s / f_y & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \ {Конец массива} \право ) } _ \ text {2D Shear} \ раз \ Underbrace { \осталось ( \ begin {array} {c c c} f_x & 0 & 0 \\ 0 & f_y & 0 \\ 0 & 0 & 1 \ {Конец массива} \право ) } _ \ text {2D Scaling} \ Конец {} Align \]
Эта интерпретация удачно разделяет внешние и внутренние параметры на сферы 3D и 2D соответственно.Это также подчеркивает, что внутреннее преобразование камеры происходит после проецирования . Одним заметным результатом этого является то, что внутренние параметры не могут влиять на видимость — скрытые объекты не могут быть обнаружены с помощью простых 2D преобразований в пространстве изображения.
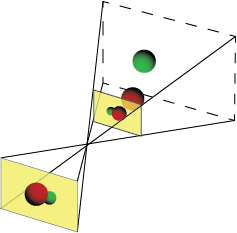
Демонстрация ниже иллюстрирует обе интерпретации внутренней матрицы. Слева интерпретация «камера-геометрия». Обратите внимание, как точечные отверстия движутся относительно плоскости изображения при настройке \ (x_0 \) и \ (y_0 \).
Справа — интерпретация «2D-трансформации». Обратите внимание, что изменение результатов фокусного расстояния вызывает масштабирование проецируемого изображения, а изменение главной точки приводит к чистому переводу.
Javascript требуется для этой демонстрации.
Осталось : сцена с камерой и громкостью просмотра. Виртуальное изображение плоскости показано желтым цветом. Право : изображение с камеры.
В этой серии статей мы увидели, как разложить
- — полная матрица камеры на внутренние и внешние матрицы,
- внешней матрицы в трехмерное вращение с последующим переводом и
- внутренняя матрица на три основных 2D преобразования.\ text {Внешняя матрица} \\ [0.5em]
знак равно
\ Overbrace { \ Underbrace {
\осталось (
\ begin {array} {c c c}
1 & 0.
Анализ матрицы камеры, Часть 2. Внешняя матрица ←
22 августа 2012 г.
Добро пожаловать в третий пост из серии «Перспективная камера — интерактивный тур». В последнем посте мы узнали, как разложить матрицу камеры на произведение внутренних и внешних матриц. В следующих двух постах мы рассмотрим внешние и внутренние матрицы более подробно. Сначала мы рассмотрим различные способы взглянуть на внешнюю матрицу, с интерактивной демонстрацией в конце.
Внешняя матрица камеры
Внешняя матрица камеры описывает местоположение камеры в мире и направление ее движения. Те, кто знаком с OpenGL, знают это как «матрицу вида» (или свернутую в «матрицу вида модели»). Он состоит из двух компонентов: матрицы вращения R и вектора перевода t , но, как мы скоро увидим, они не совсем соответствуют повороту и перемещению камеры. Сначала мы рассмотрим части внешней матрицы, а затем рассмотрим альтернативные способы описания позы камеры, которые являются более интуитивными.
Внешняя матрица принимает форму жесткой матрицы преобразования: матрица вращения 3×3 в левом блоке и вектор-столбец перевода 3×1 справа:
\ [[R \, | \, \ boldsymbol {t}] = \ left [\ begin {array} {ccc | c} r_ {1,1} & r_ {1,2} & r_ {1,3} & t_1 \\ r_ {2,1} & r_ {2,2} & r_ {2,3} & t_2 \\ r_ {3,1} & r_ {3,2} & r_ {3,3} & t_3 \\ \ end {array} \ right] \]
Обычно встречается версия этой матрицы с дополнительным рядом (0,0,0,1), добавленным внизу.Это делает матрицу квадратной, что позволяет нам дополнительно разложить эту матрицу во вращение с последующим переводом :
\ [ \ Начать {} Align \осталось [ \ BEGIN {массив} {с | с} R & \ boldsymbol {t} \\ \ HLine \ boldsymbol {0} & 1 \ {Конец массива} \ право] & = \осталось [ \ BEGIN {массив} {с | с} Я & \ boldsymbol {t} \\ \ HLine \ boldsymbol {0} & 1 \ {Конец массива} \право ] \ раз \осталось [ \ BEGIN {массив} {с | с} R & \ boldsymbol {0} \\ \ HLine \ boldsymbol {0} & 1 \ {Конец массива} \право ] \\ знак равно \ left [\ begin {array} {ccc | c} 1 & 0 & 0 & t_1 \\ 0 & 1 & 0 & t_2 \\ 0 & 0 & 1 & t_3 \\ \ HLine 0 & 0 & 0 & 1 \ end {array} \ right] \ times \ left [\ begin {array} {ccc | c} r_ {1,1} & r_ {1,2} & r_ {1,3} & 0 \\ r_ {2,1} & r_ {2,2} & r_ {2,3} & 0 \\ r_ {3,1} & r_ {3,2} & r_ {3,3} & 0 \\ \ HLine 0 & 0 & 0 & 1 \ end {array} \ right] \ Конец {} Align \]
Эта матрица описывает, как преобразовать точки в мировых координатах в координаты камеры.Вектор t можно интерпретировать как положение начала мира в координатах камеры, а столбцы R представляют направления мировых осей в координатах камеры.
Важно помнить о внешней матрице: она описывает, как мир преобразуется относительно камеры . Это часто нелогично, потому что мы обычно хотим указать, как камера трансформируется относительно мира 9109.Далее мы рассмотрим два альтернативных способа описания внешних параметров камеры, которые являются более интуитивными, и как преобразовать их в форму внешней матрицы.
Построение внешней матрицы из позы камеры
Часто более естественно указать позу камеры напрямую, а не указывать, как точки мира должны преобразовываться в координаты камеры. К счастью, построить внешнюю матрицу камеры таким способом просто: просто создайте жесткую матрицу преобразования, которая описывает позу камеры, а затем принимайте ее обратно.
Пусть C — вектор-столбец, описывающий расположение центра камеры в мировых координатах, и пусть \ (R_c \) — матрица вращения, описывающая ориентацию камеры относительно мировых координатных осей. Матрица преобразования, которая описывает позу камеры, имеет вид \ ([R_c \, | \, C] \). Как и прежде, мы делаем матрицу квадратной, добавляя дополнительную строку (0,0,0,1). Тогда внешняя матрица получается путем инвертирования матрицы поз камеры:
\ Начать {} Align \осталось[ \ BEGIN {массив} {с | с} R & \ boldsymbol {t} \\ \ HLine \ boldsymbol {0} & 1 \\ \ {Конец массива} \право] знак равно \осталось[ \ BEGIN {массив} {с | с} R_c & C \\ \ HLine \ boldsymbol {0} & 1 \\ \ {Конец массива} \ right] ^ {- 1} \\ знак равно \осталось[ \осталось[ \ BEGIN {массив} {с | с} IC \\ \ HLine \ boldsymbol {0} & 1 \\ \ {Конец массива} \право] \осталось[ \ BEGIN {массив} {с | с} R_c & 0 \\ \ HLine \ boldsymbol {0} & 1 \\ \ {Конец массива} \право] \ right] ^ {- 1} & \ text {(разложение жесткого преобразования)} \\ знак равно \осталось[ \ BEGIN {массив} {с | с} R_c & 0 \\ \ HLine \ boldsymbol {0} & 1 \\ \ {Конец массива} \ Вправо] ^ {- 1} \осталось[ \ BEGIN {массив} {с | с} IC \\ \ HLine \ boldsymbol {0} & 1 \\ \ {Конец массива} \ right] ^ {- 1} & \ text {(распространение обратного)} \\ знак равно \осталось[ \ BEGIN {массив} {с | с} R_c ^ T & 0 \\ \ HLine \ boldsymbol {0} & 1 \\ \ {Конец массива} \право] \осталось[ \ BEGIN {массив} {с | с} IC \\ \ HLine \ boldsymbol {0} & 1 \\ \ {Конец массива} \ right] & \ text {(применяя обратное)} \\ знак равно \осталось[ \ BEGIN {массив} {с | с} R_c ^ T & -R_c ^ TC \\ \ HLine \ boldsymbol {0} & 1 \\ \ {Конец массива} \ right] & \ text {(умножение матриц)} \ Конец {} Align
При применении инверсии мы используем тот факт, что инверсия матрицы вращения является ее транспонированием, а инвертирование матрицы перевода просто сводит на нет вектор перевода.Т \\ \ boldsymbol {t} & = -RC \ Конец {} Align \]
В некоторых текстах записывается внешняя матрица, заменяющая -RC на t , которая смешивает преобразование мира ( R ) и запись преобразования камеры ( C ).
«Смотровая» камера
Читатели, знакомые с OpenGL, могут предпочесть третий способ определения положения камеры, используя (a) положение камеры, (b) , на что она смотрит, и (c) в направлении «вверх».В унаследованном OpenGL это достигается функцией gluLookAt (), поэтому мы будем называть это «обзорной» камерой. Пусть C будет центром камеры, p будет целевой точкой, а u будет направлением вверх. Алгоритм вычисления матрицы вращения (перефразирован из документации OpenGL):
- Вычислить L = p — C.
- нормализовать Л.
- Вычислить s = L x u. (перекрестное произведение)
- нормализовать с.
- вычислить u ‘= s x L.
Матрица внешнего вращения определяется как:
\ [ R = \ слева [ \ BEGIN {массив} {} ссс s_1 & s_2 & s_3 \\ u_1 ‘& u_2’ & u_3 ‘\\ -L_1 & -L_2 & -L_3 \ {Конец массива} \право] \]
(Обновлено 21 мая 2014 г. — транспонированная матрица)
Вы можете получить вектор перевода так же, как и раньше, t = -RC .
Попробуйте!
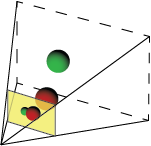
Ниже приведена интерактивная демонстрация трех различных способов параметризации внешних параметров камеры.Обратите внимание, как камера перемещается по-разному, когда вы переключаетесь между тремя параметрами.
Для этого требуется браузер с поддержкой WebGL с включенным Javascript.
Javascript требуется для этой демонстрации.
Слева : сцена с камерой и громкостью просмотра. Виртуальное изображение плоскости показано желтым цветом. Справа : изображение с камеры.
Отрегулируйте внешние параметры выше.
Это параметризация, ориентированная на мир. Эти параметры описывают, как мир изменяется относительно камеры . Эти параметры напрямую соответствуют записям в матрице внешней камеры.
При настройке этих параметров обратите внимание на то, как камера движется в мире (левая панель), и контрастируйте с параметризацией, ориентированной на камеру:
- Вращение влияет на положение камеры (синяя рамка).
- Направление движения камеры зависит от текущего вращения.
- Положительное вращение перемещает камеру по часовой стрелке (или, что то же самое, вращает мир против часовой стрелки).
Также обратите внимание, как это влияет на изображение (правая панель):
- Вращение никогда не перемещает мир происхождения (красный шар).
- Изменение \ (t_x \) всегда перемещает сферы горизонтально, независимо от вращения.
- Увеличение \ (t_z \) всегда перемещает камеру ближе к миру происхождения.
Отрегулируйте внешние параметры выше.
Это параметризация, ориентированная на камеру, которая описывает, как камера изменяется относительно мира . Эти параметры соответствуют элементам матрицы внешних камер с обратным знаком .
При настройке этих параметров обратите внимание на то, как камера движется в мире (левая панель), и контрастируйте с параметризацией, ориентированной на мир:
- Вращение происходит относительно положения камеры (синяя рамка).
- Направление движения камеры не зависит от текущего вращения.
- Положительное вращение вращает камеру против часовой стрелки (или, что то же самое, вращает мир по часовой стрелке).
- Увеличение \ (C_y \) всегда перемещает камеру к небу, независимо от вращения.
Также обратите внимание, как это влияет на изображение (правая панель):
- Вращение вокруг y перемещает обе сферы по горизонтали.
- При разных поворотах изменение \ (C_x \) перемещает сферы в разные стороны.
Отрегулируйте внешние параметры выше.
Это параметризация «взгляда», которая описывает ориентацию камеры с точки зрения того, на что она смотрит. Настройте \ (p_x \), \ (p_y \) и \ (p_z \), чтобы изменить
.новейших вопросов «матрица камеры» — переполнение стека Переполнение стека- Товары
- Клиенты
- Случаи использования
- Переполнение стека Публичные вопросы и ответы
- Команды Частные вопросы и ответы для вашей команды
- предприятие Частные вопросы и ответы для вашего предприятия
- работы Программирование и связанные с ним технические возможности карьерного роста
- Талант Нанимать технический талант
- реклама Связаться с разработчиками по всему миру
opencv — Рассчитать матрицу камеры с ИЗВЕСТНЫМИ параметрами (Python)? Переполнение стека- Товары
- Клиенты
- Случаи использования
- Переполнение стека Публичные вопросы и ответы
- Команды Частные вопросы и ответы для вашей команды
- предприятие Частные вопросы и ответы для вашего предприятия
- работы Программирование и связанные с ним технические возможности карьерного роста
- Талант Нанимать технический талант
- реклама Связаться с разработчиками по всему миру